YOLOv9改进策略 | 损失函数篇 | EIoU、SIoU、WIoU、DIoU、FocusIoU等二十余种损失函数
一、本文介绍
这篇文章介绍了YOLOv9的重大改进,特别是在损失函数方面的创新。它不仅包括了多种IoU损失函数的改进和变体,如SIoU、WIoU、GIoU、DIoU、EIOU、CIoU,还融合了“Focus”思想,创造了一系列新的损失函数。这些组合形式的损失函数超过了二十余种,每种都针对特定的目标检测挑战进行优化。文章会详细探讨这些损失函数如何提高YOLOv9在各种检测任务中的性能,包括提升精度、加快收敛速度和增强模型对复杂场景的适应性。本文章主要是为了发最近新出的Inner思想改进的各种EIoU的文章服务,其中我经过实验在绝大多数下的效果都要比本文中提到的各种损失效果要好。

专栏地址:YOLOv9有效涨点专栏-持续复现各种顶会内容-有效涨点-全网改进最全的专栏
目录
一、本文介绍
二、各种损失函数的基本原理
2.1 交集面积和并集面积
2.2 IoU
2.3 SIoU
2.4 WioU
2.5 GIoU
2.6 DIoU
2.7 EIoU
2.8 CIoU
2.9 FocusLoss
三、核心代码
四、添加教程
4.1 步骤一
4.2 步骤二
4.3 步骤三
五、全文总结
二、各种损失函数的基本原理
2.1 交集面积和并集面积
在理解各种损失函数之前我们需要先来理解一下交集面积和并集面积,在数学中我们都学习过集合的概念,这里的交集和并集的概念和数学集合中的含义是一样的。

2.2 IoU
论文地址:IoU Loss for 2D/3D Object Detectio
适用场景:普通的IoU并没有特定的适用场景
概念: 测量预测边界框和真实边界框之间的重叠度(最基本的边界框损失函数,后面的都是居于其进行计算)。

2.3 SIoU
论文地址:SIoU: More Powerful Learning for Bounding Box Regression
适用场景:适用于需要高精度边界框对齐的场景,如精细的物体检测和小目标检测。
概念: SIoU损失通过融入角度考虑和规模敏感性,引入了一种更为复杂的边界框回归方法,解决了以往损失函数的局限性,SIoU损失函数包含四个组成部分:角度损失、距离损失、形状损失和第四个未指定的组成部分。通过整合这些方面,从而实现更好的训练速度和预测准确性。

2.4 WioU
论文地址:WIoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism
适用场景:适用于需要动态调整损失焦点的情况,如不均匀分布的目标或不同尺度的目标检测。
概念:引入动态聚焦机制的IoU变体,旨在改善边界框回归损失。
![]()
2.5 GIoU
论文地址:GIoU: A Metric and A Loss for Bounding Box Regression
适用场景:适合处理有重叠和非重叠区域的复杂场景,如拥挤场景的目标检测。
概念: 在IoU的基础上考虑非重叠区域,以更全面评估边界框

2.6 DIoU
论文地址:DIoU: Faster and Better Learning for Bounding Box Regression
适用场景:适用于需要快速收敛和精确定位的任务,特别是在边界框定位精度至关重要的场景。
概念:结合边界框中心点之间的距离和重叠区域。

2.7 EIoU
论文地址:EIoU:Loss for Accurate Bounding Box Regression
适用场景:可用于需要进一步优化边界框对齐和形状相似性的高级场景。
概念:EIoU损失函数的核心思想在于提高边界框回归的准确性和效率。它通过以下几个方面来优化目标检测:
1. 增加中心点距离损失:通过最小化预测框和真实框中心点之间的距离,提高边界框的定位准确性。
2. 考虑尺寸差异:通过惩罚宽度和高度的差异,EIoU确保预测框在形状上更接近真实框。
3. 结合最小封闭框尺寸:将损失函数与包含预测框和真实框的最小封闭框的尺寸相结合,从而使得损失更加敏感于对象的尺寸和位置。
EIoU损失函数在传统IoU基础上增加了这些考量,以期在各种尺度上都能获得更精确的目标定位,尤其是在物体大小和形状变化较大的场景中。

2.8 CIoU
论文地址:CIoU:Enhancing Geometric Factors in Model Learning
适用场景:适合需要综合考虑重叠区域、形状和中心点位置的场景,如复杂背景或多目标跟踪。
概念:综合考虑重叠区域、中心点距离和长宽比。

2.9 FocusLoss
论文地址:Focal Loss for Dense Object Detection
适用场景:适用于需要高精度边界框对齐的场景,如精细的物体检测和小目标检测。
Focal Loss由Kaiming He等人在论文《Focal Loss for Dense Object Detection》中提出,旨在解决在训练过程中正负样本数量极度不平衡的问题,尤其是在一些目标检测任务中,背景类别的样本可能远远多于前景类别的样本。
Focal Loss通过修改交叉熵损失,增加一个调整因子,这个因子降低了那些已经被正确分类的样本的损失值,使得模型的训练焦点更多地放在难以分类的样本上。这种方式特别有利于提升小目标或者在复杂背景中容易被忽视的目标的检测性能。简而言之,Focal Loss让模型“关注”(或“专注”)于学习那些对提高整体性能更为关键的样本。
三、核心代码
核心代码的使用方式看章节四!
def xyxy2xywh(x):"""Convert bounding box coordinates from (x1, y1, x2, y2) format to (x, y, width, height) format where (x1, y1) is thetop-left corner and (x2, y2) is the bottom-right corner.Args:x (np.ndarray | torch.Tensor): The input bounding box coordinates in (x1, y1, x2, y2) format.Returns:y (np.ndarray | torch.Tensor): The bounding box coordinates in (x, y, width, height) format."""assert x.shape[-1] == 4, f"input shape last dimension expected 4 but input shape is {x.shape}"y = torch.empty_like(x) if isinstance(x, torch.Tensor) else np.empty_like(x) # faster than clone/copyy[..., 0] = (x[..., 0] + x[..., 2]) / 2 # x centery[..., 1] = (x[..., 1] + x[..., 3]) / 2 # y centery[..., 2] = x[..., 2] - x[..., 0] # widthy[..., 3] = x[..., 3] - x[..., 1] # heightreturn ydef bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, MDPIoU=False,Inner=False, Focaleriou=False, ShapeIoU=False, ratio=0.7, feat_h=640, SIoU=False, EIoU=False,WIoU=False, Focal=False, alpha=1, gamma=0.5,feat_w=640, eps=1e-7, d=0.00, u=0.95, scale=0.0):# Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)# Get the coordinates of bounding boxesif Inner:if not xywh:box1, box2 = xyxy2xywh(box1), xyxy2xywh(box2)(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)b1_x1, b1_x2, b1_y1, b1_y2 = x1 - (w1 * ratio) / 2, x1 + (w1 * ratio) / 2, y1 - (h1 * ratio) / 2, y1 + (h1 * ratio) / 2b2_x1, b2_x2, b2_y1, b2_y2 = x2 - (w2 * ratio) / 2, x2 + (w2 * ratio) / 2, y2 - (h2 * ratio) / 2, y2 + (h2 * ratio) / 2# Intersection areainter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp_(0) * \(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp_(0)# Union Areaunion = w1 * h1 * ratio * ratio + w2 * h2 * ratio * ratio - inter + epselse:if xywh: # transform from xywh to xyxy(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_else: # x1, y1, x2, y2 = box1b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + epsw2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps# Intersection areainter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)# Union Areaunion = w1 * h1 + w2 * h2 - inter + epsself = Noneif scale:self = WIoU_Scale(1 - (inter / union))# IoUiou = inter / unionif Focaleriou:iou = ((iou - d) / (u - d)).clamp(0, 1) # default d=0.00,u=0.95if CIoU or DIoU or GIoU or EIoU or SIoU or WIoU:cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) widthch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex heightif CIoU or DIoU or EIoU or SIoU or WIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squaredrho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)with torch.no_grad():alpha_ciou = v / (v - iou + (1 + eps))if Focal:return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)), torch.pow(inter / (union + eps),gamma) # Focal_CIoUelse:return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoUelif EIoU:rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2cw2 = torch.pow(cw ** 2 + eps, alpha)ch2 = torch.pow(ch ** 2 + eps, alpha)if Focal:return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2), torch.pow(inter / (union + eps),gamma) # Focal_EIouelse:return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIouelif SIoU:# SIoU Loss https://arxiv.org/pdf/2205.12740.pdfs_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + epss_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + epssigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)sin_alpha_1 = torch.abs(s_cw) / sigmasin_alpha_2 = torch.abs(s_ch) / sigmathreshold = pow(2, 0.5) / 2sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)rho_x = (s_cw / cw) ** 2rho_y = (s_ch / ch) ** 2gamma = angle_cost - 2distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)if Focal:return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha), torch.pow(inter / (union + eps), gamma) # Focal_SIouelse:return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIouelif ShapeIoU:# Shape-Distance #Shape-Distance #Shape-Distance #Shape-Distance #Shape-Distance #Shape-Distance #Shape-Distanceww = 2 * torch.pow(w2, scale) / (torch.pow(w2, scale) + torch.pow(h2, scale))hh = 2 * torch.pow(h2, scale) / (torch.pow(w2, scale) + torch.pow(h2, scale))cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex widthch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex heightc2 = cw ** 2 + ch ** 2 + eps # convex diagonal squaredcenter_distance_x = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2) / 4center_distance_y = ((b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4center_distance = hh * center_distance_x + ww * center_distance_ydistance = center_distance / c2# Shape-Shape #Shape-Shape #Shape-Shape #Shape-Shape #Shape-Shape #Shape-Shape #Shape-Shape #Shape-Shapeomiga_w = hh * torch.abs(w1 - w2) / torch.max(w1, w2)omiga_h = ww * torch.abs(h1 - h2) / torch.max(h1, h2)shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)return iou - distance - 0.5 * shape_costelif WIoU:if Focal:raise RuntimeError("WIoU do not support Focal.")elif scale:return getattr(WIoU_Scale, '_scaled_loss')(self), (1 - iou) * torch.exp((rho2 / c2)), iou # WIoU https://arxiv.org/abs/2301.10051else:return iou, torch.exp((rho2 / c2)) # WIoU v1if Focal:return iou - rho2 / c2, torch.pow(inter / (union + eps), gamma) # Focal_DIoUelse:return iou - rho2 / c2 # DIoUc_area = cw * ch + eps # convex areaif Focal:return iou - torch.pow((c_area - union) / c_area + eps, alpha), torch.pow(inter / (union + eps),gamma) # Focal_GIoU https://arxiv.org/pdf/1902.09630.pdfelse:return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdfelif MDPIoU:d1 = (b2_x1 - b1_x1) ** 2 + (b2_y1 - b1_y1) ** 2d2 = (b2_x2 - b1_x2) ** 2 + (b2_y2 - b1_y2) ** 2mpdiou_hw_pow = feat_h ** 2 + feat_w ** 2return iou - d1 / mpdiou_hw_pow - d2 / mpdiou_hw_pow # MPDIoUif Focal:return iou, torch.pow(inter / (union + eps), gamma) # Focal_IoUelse:return iou # IoU
四、添加教程
本文代码提到的MPDIoU需要在另一篇文章进行修改一些细节内容,本文的内容以及默认大家修改了我的MPDIoU(不修改会报错)!
另一篇文章的链接:YOLOv9改进策略 | 损失函数篇 | 利用真实边界框损失之MPDIoU助力YOLOv9精度更上一层楼
4.1 步骤一
第一步我们需要先找到如下的文件'utils/metrics.py'(这里以YOLOv9的修改损失函数为例,GELAN的需要修改'utils/loss_tal.py'修改教程一致,本文以YOLOv9的为例)。
我们找到如下图所示的代码!

4.2 步骤二
步骤二我们用章节三中的核心代码完全替换上面4.1红框圈出的整个函数(注意是整个函数红框仅仅是圈出了部分的代码因为代码太多不可能全部圈出来)!
修改完的样子如下图所示!

4.3 步骤三
我们上面相当于以及在项目内添加了Inner等损失函数,下一部我们教的是大家如何开启Inner的损失函数!
我们需要找到如下的文件'utils/loss_tal_dual.py' 按照图示进行修改!
class BboxLoss(nn.Module):def __init__(self, reg_max, use_dfl=False):super().__init__()self.reg_max = reg_maxself.use_dfl = use_dfldef forward(self, pred_dist, pred_bboxes, anchor_points, target_bboxes, target_scores, target_scores_sum, fg_mask,h=None, w=None):# iou lossbbox_mask = fg_mask.unsqueeze(-1).repeat([1, 1, 4]) # (b, h*w, 4)pred_bboxes_pos = torch.masked_select(pred_bboxes, bbox_mask).view(-1, 4)target_bboxes_pos = torch.masked_select(target_bboxes, bbox_mask).view(-1, 4)bbox_weight = torch.masked_select(target_scores.sum(-1), fg_mask).unsqueeze(-1)weight = target_scores.sum(-1)[fg_mask].unsqueeze(-1)iou = bbox_iou(pred_bboxes_pos, target_bboxes_pos, xywh=False, CIoU=False, Inner=True, Focaleriou=False,MDPIoU=False, ShapeIoU=True, EIoU=False, WIoU=False, DIoU=False, Focal=False, GIoU=False,feat_h=h, feat_w=w, alpha=1, gamma=0.5, eps=1e-7, d=0.00, u=0.95, scale=0.0)if type(iou) is tuple:if len(iou) == 2:# Focus Loss 时返回的是元组类型,进行额外处理loss_iou = ((1.0 - iou[0]) * iou[1].detach() * weight).sum() / target_scores_sumelse:loss_iou = (iou[0] * iou[1] * weight).sum() / target_scores_sumelse:# 正常的损失函数loss_iou = 1.0 - iouloss_iou *= bbox_weightloss_iou = loss_iou.sum() / target_scores_sum# 对应的那个设置为True就开启那个损失函数除了Inner之外其余的都只能单独使用只有Innner可以配合其它损失函数使用# dfl lossif self.use_dfl:dist_mask = fg_mask.unsqueeze(-1).repeat([1, 1, (self.reg_max + 1) * 4])pred_dist_pos = torch.masked_select(pred_dist, dist_mask).view(-1, 4, self.reg_max + 1)target_ltrb = bbox2dist(anchor_points, target_bboxes, self.reg_max)target_ltrb_pos = torch.masked_select(target_ltrb, bbox_mask).view(-1, 4)loss_dfl = self._df_loss(pred_dist_pos, target_ltrb_pos) * bbox_weightloss_dfl = loss_dfl.sum() / target_scores_sumelse:loss_dfl = torch.tensor(0.0).to(pred_dist.device)return loss_iou, loss_dfl, iou对应的那个设置为True就开启那个损失函数除了Inner和Focal之外其余的都只能单独使用只有Inner可以配合其它损失函数使用

到此我们就修改完成了,上面步骤三以及开启了对应的损失函数机制!
五、全文总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的YOLOv9改进有效涨点专栏,本专栏目前为新开的,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,如果大家觉得本文帮助到你了,订阅本专栏(目前免费订阅,后期不迷路),关注后续更多的更新~
专栏地址:YOLOv9有效涨点专栏-持续复现各种顶会内容-有效涨点-全网改进最全的专栏
相关文章:
YOLOv9改进策略 | 损失函数篇 | EIoU、SIoU、WIoU、DIoU、FocusIoU等二十余种损失函数
一、本文介绍 这篇文章介绍了YOLOv9的重大改进,特别是在损失函数方面的创新。它不仅包括了多种IoU损失函数的改进和变体,如SIoU、WIoU、GIoU、DIoU、EIOU、CIoU,还融合了“Focus”思想,创造了一系列新的损失函数。这些组合形式的…...

贪心算法-跳跃游戏
给你一个非负整数数组 nums ,你最初位于数组的 第一个下标 。数组中的每个元素代表你在该位置可以跳跃的最大长度。 判断你是否能够到达最后一个下标,如果可以,返回 true ;否则,返回 false 。 示例 1: 输…...
sql知识总结二
一.报错注入 1.什么是报错注入? 这是一种页面响应形式,响应过程如下: 用户在前台页面输入检索内容----->后台将前台输入的检索内容无加区别的拼接成sql语句,送给数据库执行------>数据库将执行的结果返回给后台ÿ…...

VSCode和CMake实现C/C++开发
VSCode和CMake实现Ubuntu下C/C++开发总结 目录 0.简介1.Linux系统介绍2.开发环境搭建2.1 编译器,调试器安装2.2 CMake安装3.GCC编译器3.1 编译过程3.2 g++重要编译参数4.g++编译实战4.0 编译前4.1 直接编译4.2 生成库文件并编译4.3 编译后4.3.1 编译完成后的目录结构4.3.2 运行…...
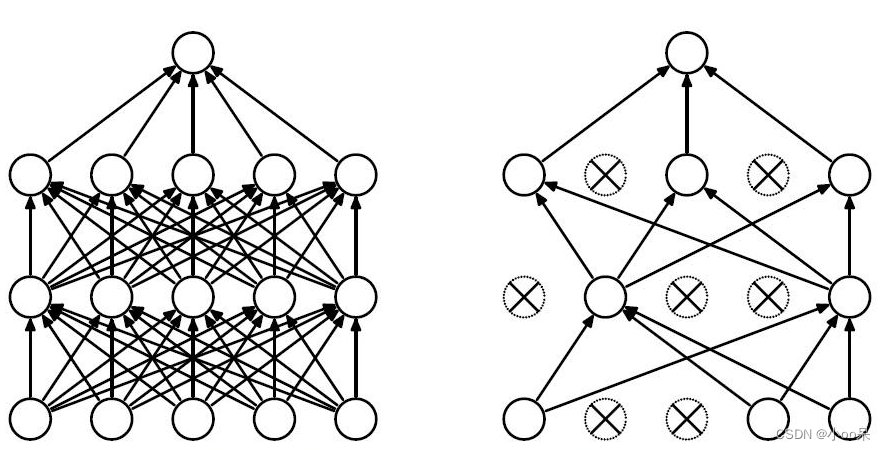
【机器学习300问】74、如何理解深度学习中L2正则化技术?
深度学习过程中,若模型出现了过拟合问题体现为高方差。有两种解决方法: 增加训练样本的数量采用正则化技术 增加训练样本的数量是一种非常可靠的方法,但有时候你没办法获得足够多的训练数据或者获取数据的成本很高,这时候正则化技…...
)
C语言程序设计每日一练(4)
完全平方数 首先,我们需要明确什么是完全平方数。完全平方数是指一个整数,它可以表示为另一个整数的平方。例如,1、4、9、16等都是完全平方数,因为它们分别是1、2、3、4的平方。 现在,让我们回到这个问题。我们知道这…...

m4p转换mp3格式怎么转?3个Mac端应用~
M4P文件格式的诞生伴随着苹果公司引入FairPlay版权管理系统,该系统旨在保护音频的内容。M4P因此而生,成为受到FairPlay系统保护的音频格式,常见于苹果设备的iTunes等平台。 MP3文件格式的多个优点 MP3格式的优点显而易见。首先,其…...
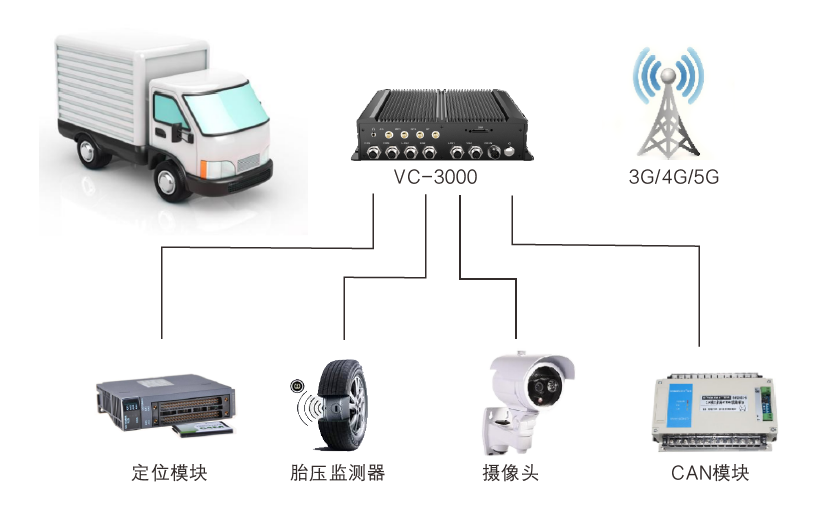
全国产化无风扇嵌入式车载电脑在车队管理嵌入式车载行业应用
车队管理嵌入式车载行业应用 车队管理方案能有效解决车辆繁多管理困难问题,配合调度系统让命令更加精确有效执行。实时监控车辆状况、行驶路线和位置,指导驾驶员安全有序行驶,有效降低保险成本、事故概率以及轮胎和零部件的磨损与损坏。 方…...
爬虫入门——Request请求
目录 前言 一、Requests是什么? 二、使用步骤 1.引入库 2.请求 3.响应 三.总结 前言 上一篇爬虫我们已经提及到了urllib库的使用,为了方便大家的使用过程,这里为大家介绍新的库来实现请求获取响应的库。 一、Requests是什么࿱…...

创建一个javascript公共方法的npm包,js-tool-big-box,发布到npm上,一劳永逸
前端javascript的公共方法太多了,时间日期的,数值的,字符串的,搞复制的,搞网络请求的,搞数据转换的,几乎就是每个新项目,有的拷一拷,没有的继续写,放个utils目…...
【在线OJ系统】自定义注解实现分布式ID无感自增
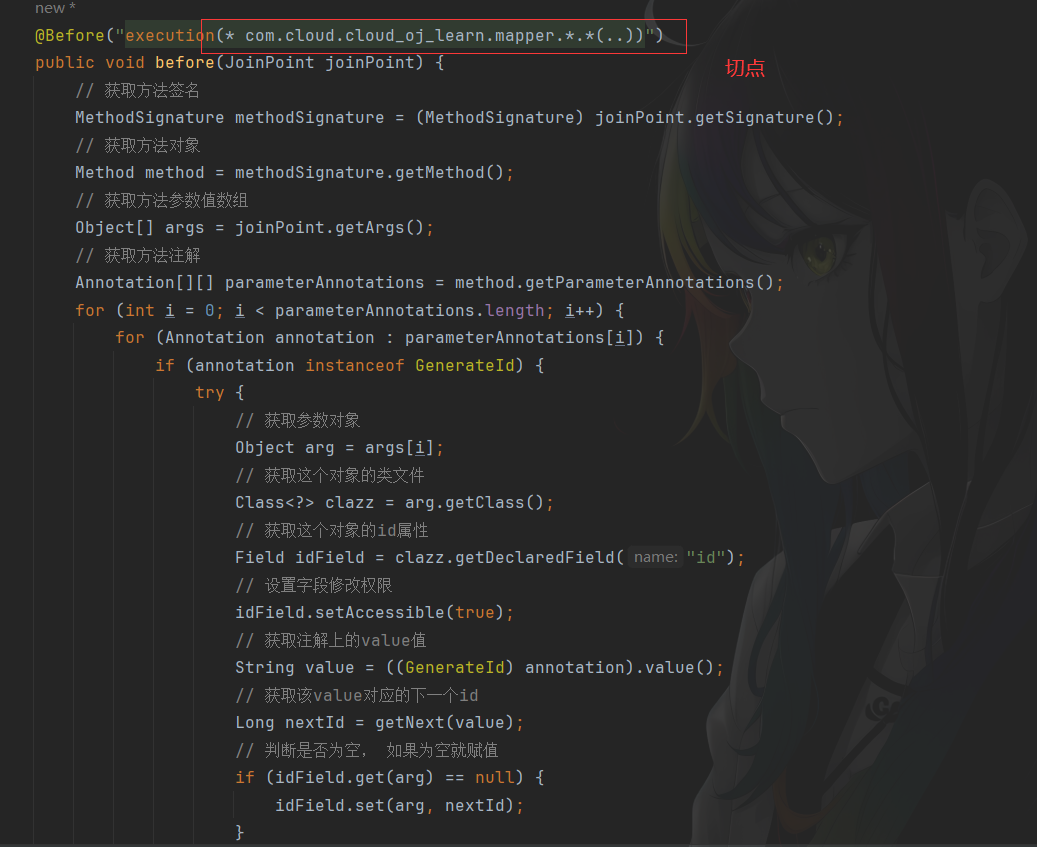
实现思路 首先自定义参数注解,然后根据AOP思想,找到该注解作用的切点,也就是mapper层对于mapper层的接口在执行前都会执行该aop操作:获取到对于的方法对象,根据方法对象获取参数列表,根据参数列表判断某个…...
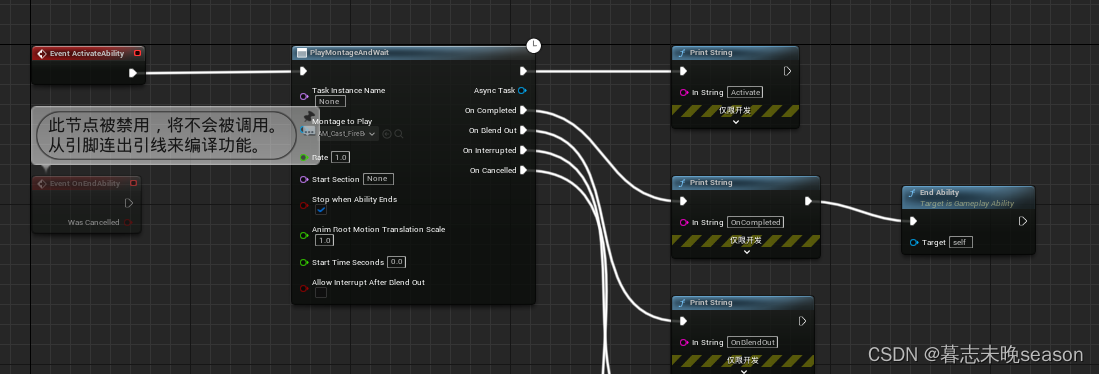
35. UE5 RPG制作火球术技能
接下来,我们将制作技能了,总算迈进了一大步。首先回顾一下之前是如何实现技能触发的,然后再进入正题。 如果想实现我之前的触发方式的,请看此栏目的31-33篇文章,讲解了实现逻辑,这里总结一下: …...
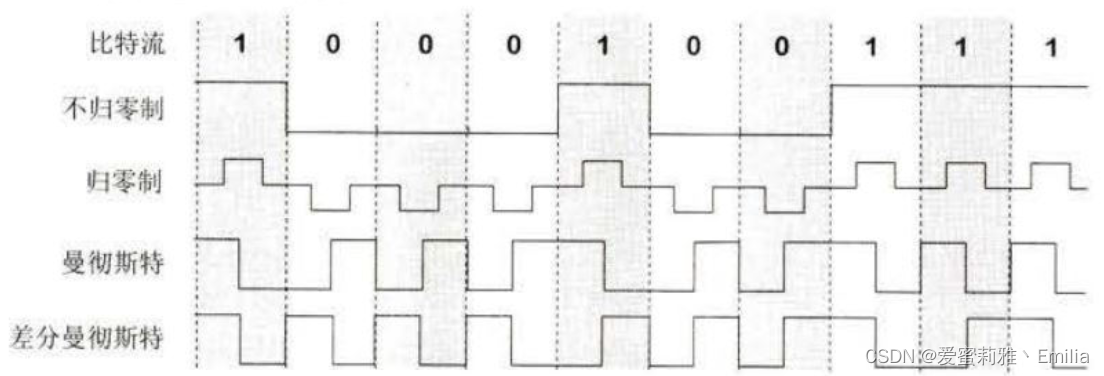
计算机网络 TCP/IP体系 物理层
一. TCP/IP体系 物理层 1.1 物理层的基本概念 物理层作为TCP/IP网络模型的最低层,负责直接与传输介质交互,实现比特流的传输。 要完成物理层的主要任务,需要确定以下特性: 机械特性:物理层的机械特性主要涉及网络…...

微服务相关
1. 微服务主要七个模块 中央管理平台:生产者、消费者注册,服务发现,服务治理,调用关系生产者消费者权限管理流量管理自定义传输协议序列化反序列化 2. 中央管理平台 生产者A在中央管理平台注册后,中央管理平台会给他…...
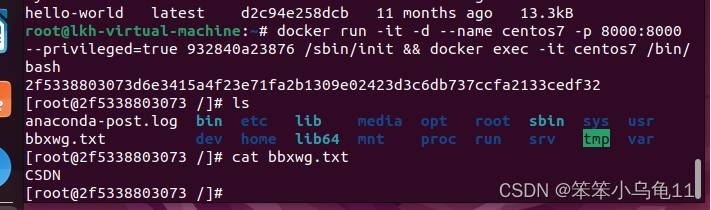
虚拟机下如何使用Docker(完整版)
Docker详细介绍: Docker 是一款开源的应用容器引擎,由Docker公司最初开发并在2013年发布。Docker的核心理念源自于操作系统级别的虚拟化技术,尤其是Linux上的容器技术(如LXC),它为开发人员和系统管理员提供…...
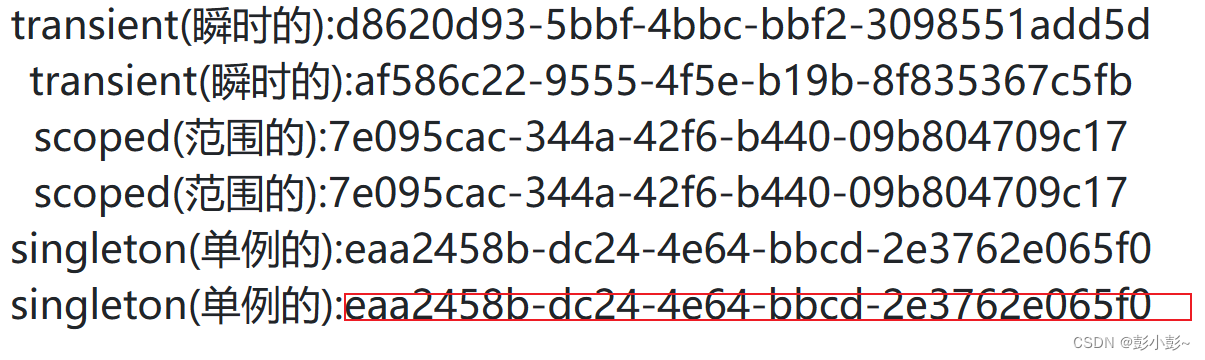
asp.net core 依赖注入后的服务生命周期
ASP.NET Core 依赖注入(DI)容器支持三种服务的生命周期选项,它们定义了服务实例的创建和销毁的时机。理解这三种生命周期对于设计健壯且高效的应用程序非常重要: 瞬时(Transient): 瞬时服务每次…...

交换排序:冒泡排序和快速排序
冒泡排序 思路 通过多次遍历数组,比较相邻的元素,并交换它们,使得每次遍历结束后,最大(或最小)的元素都“冒泡”到数组的末尾 实现 public class Main {public static void main(String[] args) {int[] …...

聊天机器人ChatGPT指导下的论文写作
ChatGPT无限次数:点击直达 聊天机器人ChatGPT指导下的论文写作 引言 随着人工智能技术的不断发展,聊天机器人在各个领域得到了广泛应用。其中,ChatGPT作为一个先进的自然语言处理模型,为各种文本生成任务提供了强大的支持。在学术界…...
康谋技术 | 深入探讨:自动驾驶中的相机标定技术
随着自动驾驶技术的快速发展,多传感器的数据采集和融合可以显著提高系统的冗余度和容错性,进而保证决策的快速性和正确性。在项目开发迭代过程中,传感器标定扮演着至关重要的角色,它位于数据采集平台与感知融合算法之间࿰…...

如何在 Ubuntu 上启用 IPv6
一、前提条件 一台安装了 Ubuntu 22.04 的计算机具有 sudo 权限的用户账户已连接到支持 IPv6 的网络 二、检查系统是否支持 IPv6 在启用 IPv6 之前,首先要确保您的系统支持 IPv6。要检查内核是否启用了 IPv6,可以运行以下命令: cat /proc/…...

准备转型AI产品经理的朋友,建议看看这本书
本文从《AI即未来:普通人用好人工智能的18大工作场景》出发,深入探讨了AI大模型的选择、部署及评估。文章指出,面对众多AI工具,应根据任务需求、输出质量、成本等因素进行选择,并强调AI更像助手,需人类监督…...

死锁四大必要条件解析
好的,针对“死锁考点与高频面试题”,我将直接进行核心内容解构与推演,并生成符合规范的答案。死锁是多线程并发编程中的核心难点与高频考点,其核心围绕定义、条件、场景、检测、预防与避免展开。一、 死锁核心定义与必要条件死锁是…...

用AG9311芯片DIY一个多功能Type-C扩展坞:从原理图到PCB布局的保姆级指南
用AG9311芯片DIY多功能Type-C扩展坞:从原理图到PCB布局全解析 Type-C扩展坞早已成为现代数字生活的必需品,但市面上成品往往价格高昂或功能单一。对于硬件爱好者而言,自己动手打造一款多功能扩展坞不仅能节省成本,更能深度掌握高速…...
流程实现)
ISP中的AE(自动曝光)流程实现
深入理解ARM ISP中的AE(自动曝光)流程实现 概述 AE(Auto Exposure,自动曝光)是相机ISP(Image Signal Processor)中的核心算法之一,负责根据场景亮度自动调整曝光参数,确保…...

如何免费实现iOS设备虚拟定位?iFakeLocation跨平台实用指南
如何免费实现iOS设备虚拟定位?iFakeLocation跨平台实用指南 【免费下载链接】iFakeLocation Simulate locations on iOS devices on Windows, Mac and Ubuntu. 项目地址: https://gitcode.com/gh_mirrors/if/iFakeLocation 你是否曾经想过,在舒适…...

免费素材资源终极指南:发现300+个高质量免费图片视频网站 [特殊字符]
免费素材资源终极指南:发现300个高质量免费图片视频网站 🚀 【免费下载链接】awesome-stock-resources :city_sunrise: A collection of links for free stock photography, video and Illustration websites 项目地址: https://gitcode.com/gh_mirror…...
)
告别兼容性烦恼:在Vue/React项目中优雅集成sm-crypto国密算法(附IE9+解决方案)
告别兼容性烦恼:在Vue/React项目中优雅集成sm-crypto国密算法(附IE9解决方案) 国密算法作为国内信息安全领域的重要标准,在前端项目中的集成需求日益增长。然而,现代前端框架与老旧浏览器兼容性问题往往成为开发者的拦…...

现实是期待的土壤,期待是改变现实的方向
期待的对立统一结构期待 理想应然(正题) vs 现实实然(反题),二者的统一构成一个动态的矛盾运动。同一性(相互依存):没有对现实的不满足和对未来的向往,就没有期待&#…...

用Matplotlib heatmap分析你的数据:从农产品收成到商品销量的实战案例拆解
用Matplotlib heatmap解锁业务洞察:从农场到电商的数据可视化实战 热力图(heatmap)远不止是颜色方块的排列——它是数据与商业决策之间的视觉桥梁。想象一下,你面前有一张农场作物产量的热力图,颜色从深绿渐变到亮黄&a…...

基于Rust与智能体范式构建生产级AI工作流:从Dust平台实践到避坑指南
1. 从零到一:理解Dust平台的核心价值与设计哲学如果你和我一样,每天都在和代码、文档、数据打交道,那你肯定也经历过这样的时刻:为了一个简单的数据查询,需要在不同工具间反复切换;为了写一份周报ÿ…...