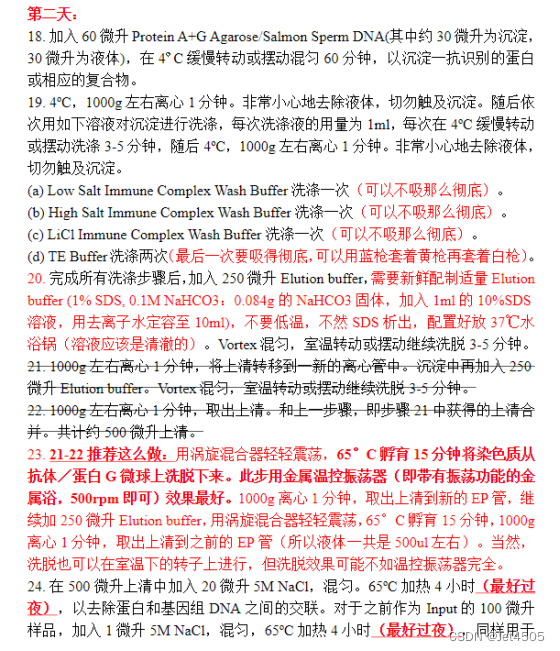
基于51单片机的步进电机调速系统设计
基于51单片机的步进电机调速系统
(仿真+程序+原理图+设计报告)
功能介绍
具体功能:
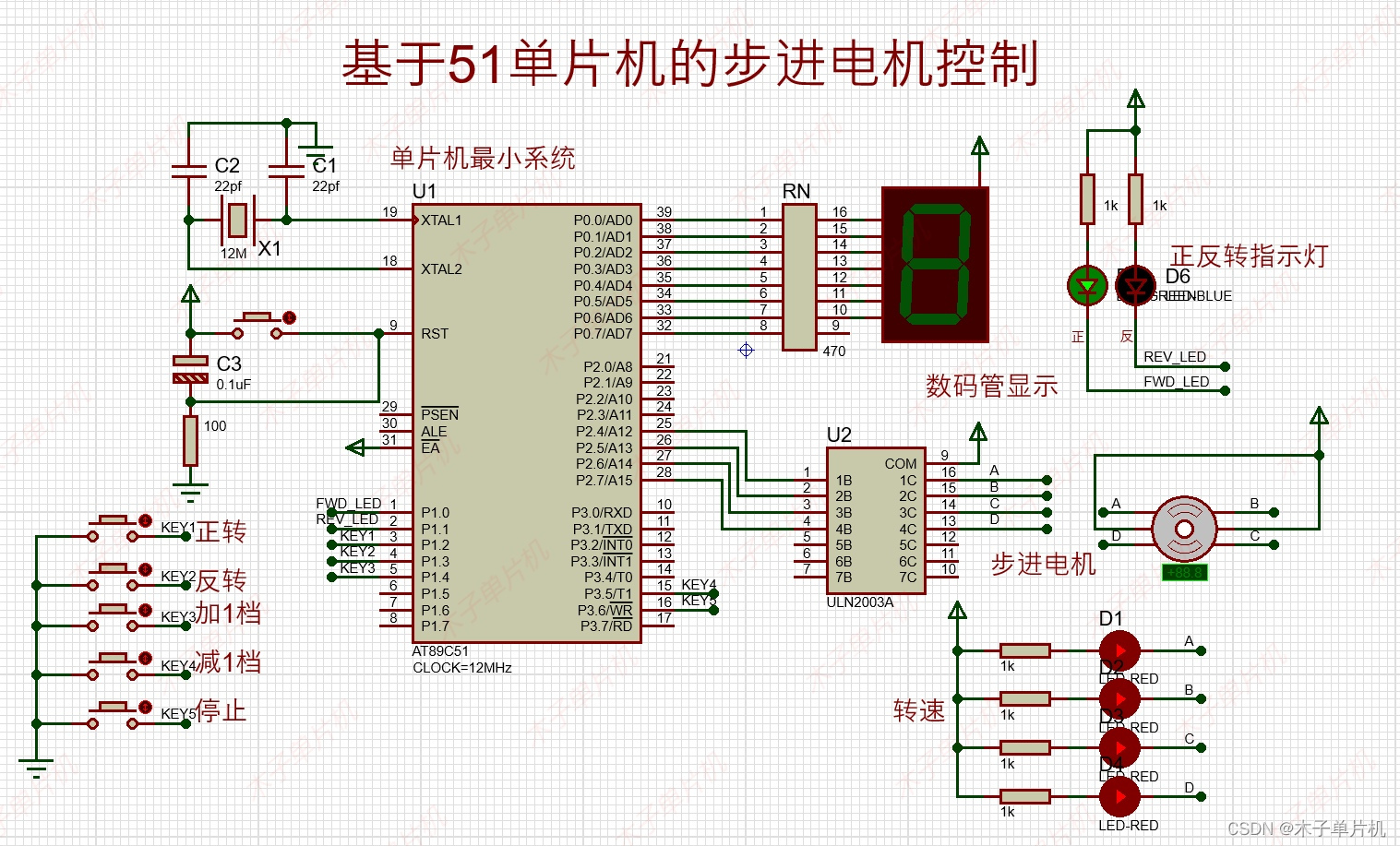
1.按键可以控制电机正、反转,加、减速,停止;
2.一位7段数码管实时显示档位(共9档);
3.两个LED分别来表示正转、反转;
4.四个LED流水闪烁来表示电机转速;
演示视频:
基于51单片机的步进电机调速系统设计

#include "reg52.h"
/*
按键控制步进电机:正转、反转、加1档、减1档、停止
数码管显示步进电机档位,总共有9档
LED灯显示正转、反转、转速
*//*宏定义*/
#define SpeedShow P0 //数码管显示接口
#define MotorDriver P2 //步进电机驱动接口typedef unsigned char uchar; // 8位有符号整数
typedef unsigned int uint; //16位有符号整数
typedef unsigned long ulong; //32位有符号整数#define KEY_TIME_SHORT 20 //短按的按键去抖动延时的时间
//---加入全局变量--//
extern uchar KeyCode;
extern uint KeyTimeCnt[5]; //按键去抖动延时计数器,分别对应KEY1/2/3/4/5
extern uchar KeyLock[5]; //按键触发后自锁的变量标志,分别对应KEY1/2/3/4/5//-----------------------------------------------------------------
// 相关函数声明
//-----------------------------------------------------------------
void KeyScan(); //按键扫描函数 放在定时中断里
void Delay10ms(); //延时函数//0~9 的共阳数码管段码,最后一个是黑屏
const uchar SEG_CODE[] = {0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xFF};//输出励磁序列的频率参数{TH1,TL1}
const uchar Timer[9][2]={{0xDE,0xE4},{0xE1,0xEC},{0xE5,0xD4},{0xE9,0xBC}, //8.476 ~ 1ms{0xEd,0xA4},{0xF1,0x8C},{0xF5,0x74},{0xF9,0x5C},{0xFC,0x18}};//步进电机正转的励磁序列
const uchar FFW[] = {0x1F,0x3F,0x2F,0x6F,0x4F,0xCF,0x8F,0x9F}; //DCBAXXXX//步进电机反转的励磁序列
const uchar REV[] = {0x9F,0x8F,0xCF,0x4F,0x6F,0x2F,0x3F,0x1F}; //DCBAXXXX//枚举变量--正反转标志
typedef enum{FwdRun, RevRun} RunFlag;
RunFlag flag1 = FwdRun;uchar speed = 0;uchar KeyCode = 0; //按键编码值//共5个独立机械按键,通过短按实现5种按键编码值
uint KeyTimeCnt[5] = {0,0,0,0,0}; //按键去抖动延时计数器,分别对应KEY1/2/3/4/5
uchar KeyLock[5] = {0,0,0,0,0}; //按键触发后自锁的变量标志,分别对应KEY1/2/3/4/5/* IO引脚分配*/
sbit KEY1 = P1^2; //按键1
sbit KEY2 = P1^3; //按键2
sbit KEY3 = P1^4; //按键3
sbit KEY4 = P3^5; //按键4
sbit KEY5 = P3^6; //按键5sbit FWD_LED = P1^0; //正转指示灯
sbit REV_LED = P1^1; //反转指示灯//函数声明
void T0_Init(); //定时器0初始化函数声明
void T1_Init(); //定时器1初始化函数声明
void KeyService(); //按键服务函数声明
void delay_ms(uint t); //毫秒延时函数声明//-----------------------------------------------------------------
// 主程序
//-----------------------------------------------------------------
void main()
{ T0_Init(); //定时器0初始化T1_Init(); //定时器1初始化FWD_LED = 0; //正转指示灯亮,默认初始化是正转delay_ms(500); //延时500ms,待各个模块上电稳定EA = 1; //开启中断while(1){ KeyService(); //按键服务程序}
} //-----------------------------------------------------------------
// Timer0 初始化,模式1,允许中断,1ms定时
// Timer0 用于按键扫描
//-----------------------------------------------------------------
void T0_Init()
{TMOD &= 0xF0;TMOD |= 0x01; //T0工作于模式1,16位定时器TH0 = (65536 - 1000) >> 8; //1ms定时TL0 = (65536 - 1000) & 0xFF;ET0 = 1; //允许T0中断TR0 = 1; //启动T0
}//-----------------------------------------------------------------
// Timer1 初始化,模式1,允许中断
// Timer1 用于改变步进电机转速
//-----------------------------------------------------------------
void T1_Init()
{TMOD &= 0x0F;TMOD |= 0x10; //定时器1工作于模式1,16位定时器TH1 = Timer[speed][0];TL1 = Timer[speed][1]; //定时器1,定时用于步进电机转速控制ET1 = 1; //允许T1中断PT1 = 1; //定时器1优先级高TR1 = 0; //关闭定时器1
}//-----------------------------------------------------------------
// Timer0 中断服务程序
//-----------------------------------------------------------------
void InterruptTime0() interrupt 1
{TH0 = (65536 - 1000) >> 8; //1msTL0 = (65536 - 1000) & 0xFF;KeyScan(); //按键扫描
}//-----------------------------------------------------------------
// Timer1 中断服务程序
//-----------------------------------------------------------------
void InterruptTime1() interrupt 3
{static step1 = 0; static step2 = 0;TH1 = Timer[speed - 1][0]; //根据不同的转速档位,给定时器1赋定时器值TL1 = Timer[speed - 1][1]; //按照定时器1的频率循环发送正转励磁序列的脉冲给步进电机,使其不停地转动if(flag1 == FwdRun)//正转{MotorDriver = FFW[step1++]; if(step1 == 8) step1 = 0; }//按照定时器1的频率循环发送反转励磁序列的脉冲给步进电机,使其不停地转动else if(flag1 == RevRun) {MotorDriver = REV[step2++];if(step2 == 8) step2 = 0; }
}//-----------------------------------------------------------------
// 按键服务程序
//-----------------------------------------------------------------
void KeyService()
{switch (KeyCode){case 1: flag1 = FwdRun; //正转FWD_LED = 0; REV_LED = 1; //正转指示灯亮KeyCode = 0;break; case 2: flag1 = RevRun; //反转FWD_LED = 1; REV_LED = 0; //反转指示灯亮KeyCode = 0;break;case 3: speed++; //速度加if(speed == 10) speed = 1; SpeedShow = SEG_CODE[speed];if(TR1 == 0) TR1 = 1;KeyCode = 0;break;case 4: speed--; //速度减if(speed == 0 || speed == -1 ) speed = 9;SpeedShow = SEG_CODE[speed]; if(TR1 == 0) TR1 = 1; KeyCode = 0;break;case 5: TR1 = 0; //停止SpeedShow = 0xFF;MotorDriver = 0x00;KeyCode = 0;break; default: ;}
}硬件设计
使用元器件:
单片机:STC89C52;
(注意:单片机是通用的,无论51还是52、无论stc还是at都一样,引脚功能都一样。程序也是一样的。)
万用板9*15;DC电源插口;
自锁开关;2.2K电阻*7;
40脚IC座;钮扣电池;
电池座;10uF电容;
ULN2003驱动芯片;
1位7段LED数码管;
10K排阻(103);
10K电阻*1;按键*6;
30Pf瓷片电容*2;
DC-5V步进电机;
12M晶振;导线:若干;
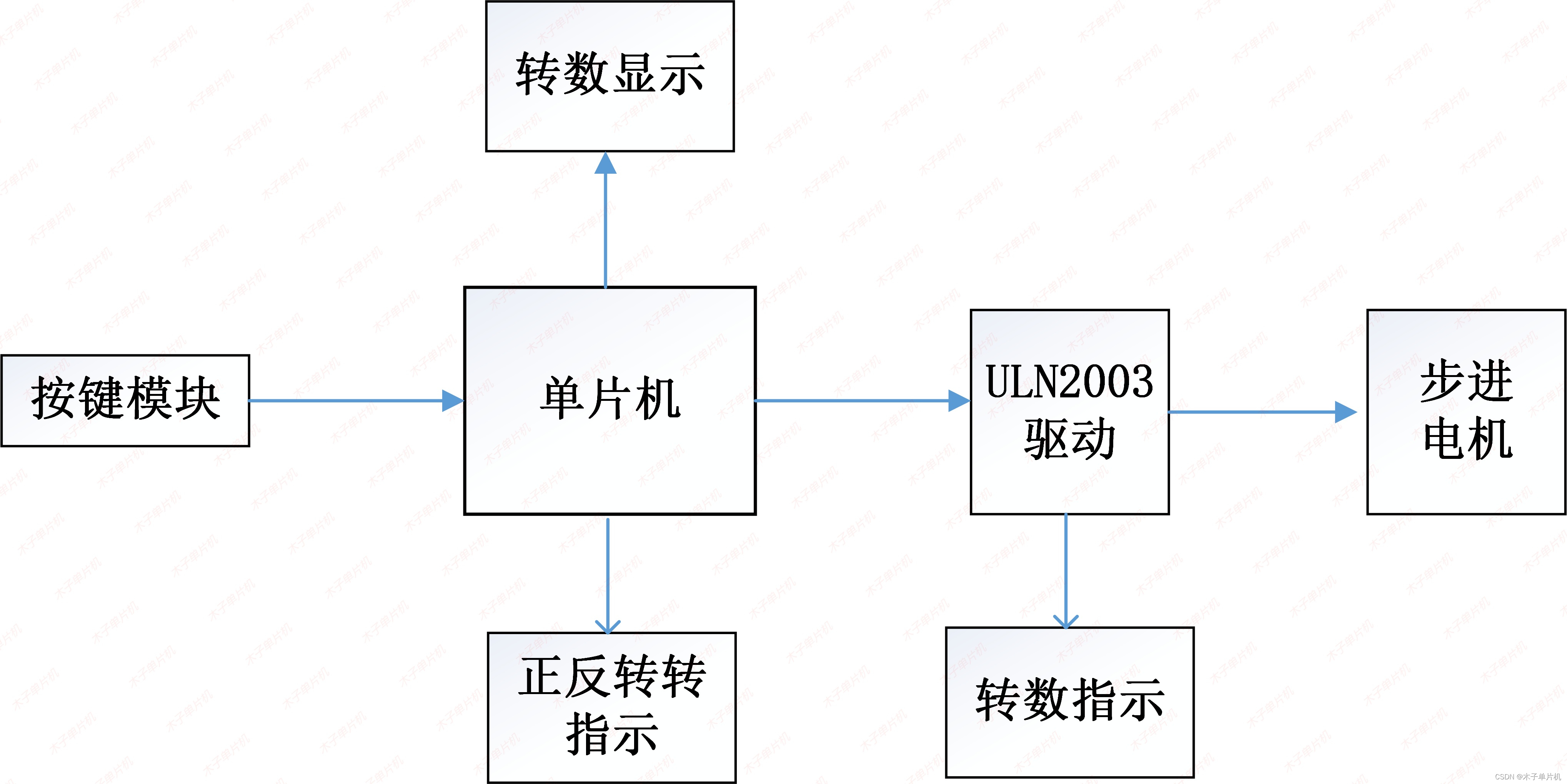
结构图:
设计资料
01 仿真图
本设计使用proteus8.9版本设计,资料里有安装教程,无需担心!具体如图!

02 原理图
本系统原理图采用Altium Designer19设计,具体如图!

03 程序
本设计使用软件keil5版本编程设计,资料里有安装教程,无需担心!具体如图!

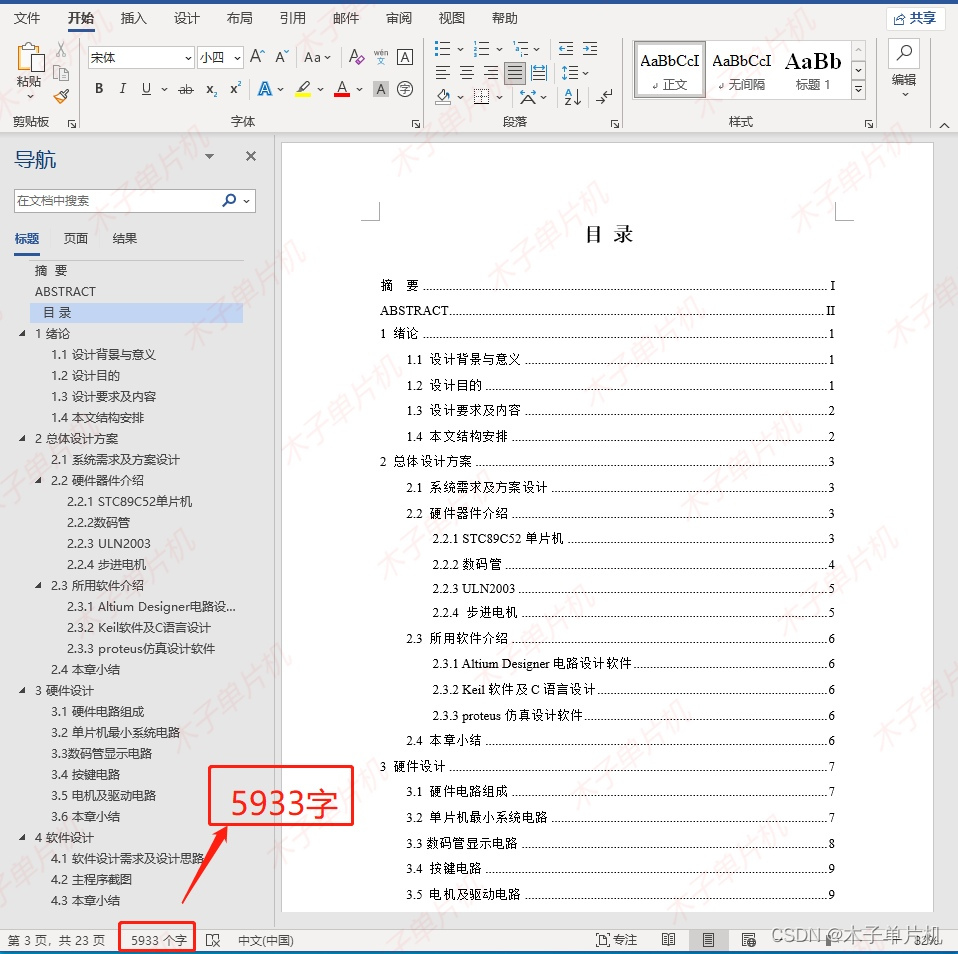
04 设计报告
五千字设计报告,具体如下!
05 设计资料
资料获取请关注同名公众号,全部资料包括仿真源文件 、程序(含注释)、AD原理图、参考论文、实物图、流程图、任务书、元件清单、讲解视频等。具体内容如下,全网最全! !
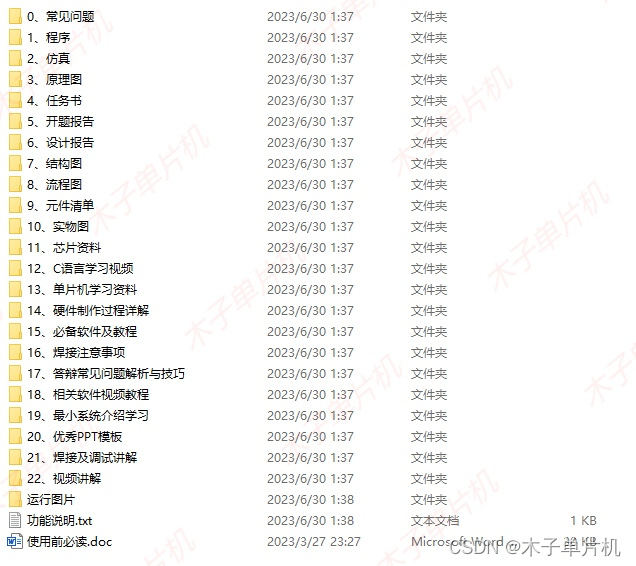
资料获取请观看前面演示视频!
点赞分享一起学习成长。
相关文章:
基于51单片机的步进电机调速系统设计
基于51单片机的步进电机调速系统 (仿真+程序+原理图+设计报告) 功能介绍 具体功能: 1.按键可以控制电机正、反转,加、减速,停止; 2.一位7段数码管实时显示档位…...

postcss概述
PostCSS是一个用于转换CSS的工具,它使用插件来处理CSS,并提供了一种方式来编写可扩展的CSS代码。其主要特点如下: 插件驱动:PostCSS的核心非常轻量级,大部分功能都是通过插件来实现的。这意味着用户可以根据项目的需求…...
【Proteus】51单片机对直流电机的控制
直流电机:输出或输入为直流电能的旋转电机。能实现直流电能和机械能互相转换的电机。把它作电动机运行时是直流电动机,电能转换为机械能;作发电机运行时是直流发电机,机 械能转换为电能。 直流电机的控制: 1、方向控制…...
JET毛选学习笔记:如何利用《实践论》学习实验
一、个人背景介绍 本人本科读的是预防医学专业(因为没考上临床),硕博连读(报名人少,我报了就得了)的时候专业是流行病与卫生统计学,除了学习流行病学、统计学(忘得差不多了…...

FinalShell 远程连接 Linux(Ubuntu)系统
Linux 系列教程: VMware 安装配置 Ubuntu(最新版、超详细)FinalShell 远程连接 Linux(Ubuntu)系统Ubuntu 系统安装 VS Code 并配置 C 环境 ➡️➡️➡️提出一个问题:为什么使用 FinalShell 连接࿰…...
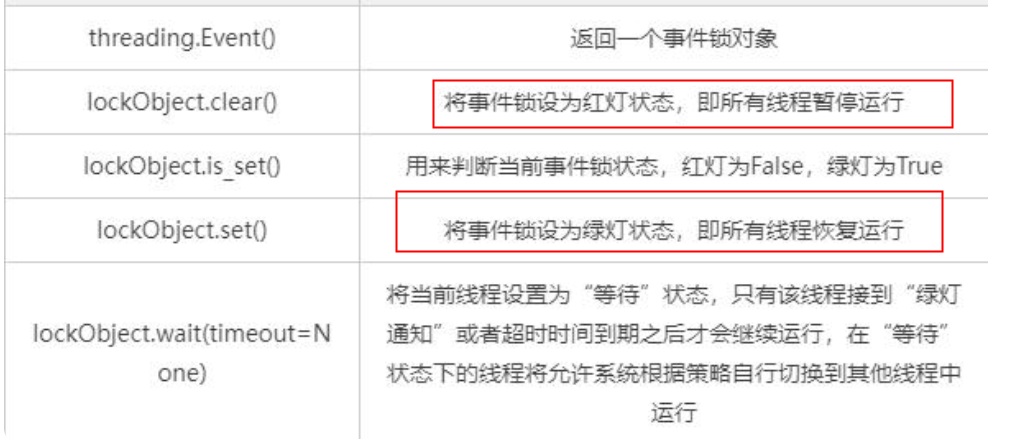
Python零基础从小白打怪升级中~~~~~~~多线程
线程安全和锁 一、全局解释器锁 首先需要明确的一点是GIL并不是Python的特性,它是在实现Python解析器(CPython)时所引入的一个概念。 GIL全称global interpreter lock,全局解释器锁。 每个线程在执行的时候都需要先获取GIL,保证同一时刻只…...
【机器学习300问】67、均方误差与交叉熵误差,两种损失函数的区别?
一、均方误差(Mean Squared Error, MSE) 假设你是一个教练,在指导学生射箭。每次射箭后,你可以测量子弹的落点距离靶心的差距(误差)。MSE就像是计算所以射击误差的平方后的平均值。它强调了每一次偏离靶心的…...
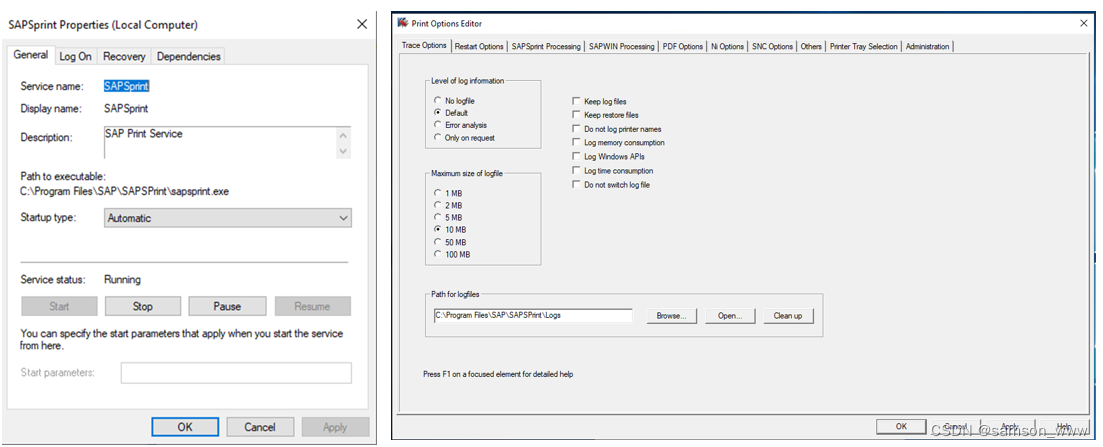
SAP打印输出设置
SAP打印输入有很多方式,适合不同的应用场景。 一.打印输出总体概览图 二.前台打印 这个是比较常见的,前端打印的出现减轻了管理员的工作量,用户可以选择自己电脑上的打印机输出,不需要所有打印机都在SAP平台中进行配置࿰…...

qt对json文件下,qdatetime时间的正确读写方式
qt 对json文件下qdatetime时间的正确读写方式 被搞了很长时间,最后发现是需要控制格式。 正确方式 // read QByteArray localBytes mapJson["playTime"].toString().toLocal8Bit(); char* char_time localBytes.data(); std::string str_time char_…...

【系统分析师】计算机网络
文章目录 1、TCP/IP协议族1.1 DHCP协议1.2 DNS协议1.3网络故障诊断 2、网路规划与设计2.1逻辑网络设计2.2物理网络设计2.3 分层设计 3、网络接入3.1 接入方式3.2 IPv6地址 4、综合布线技术5、物联网5.1物联网概念与分层5.2 物联网关键技术 6、云计算7、网络存储技术(…...
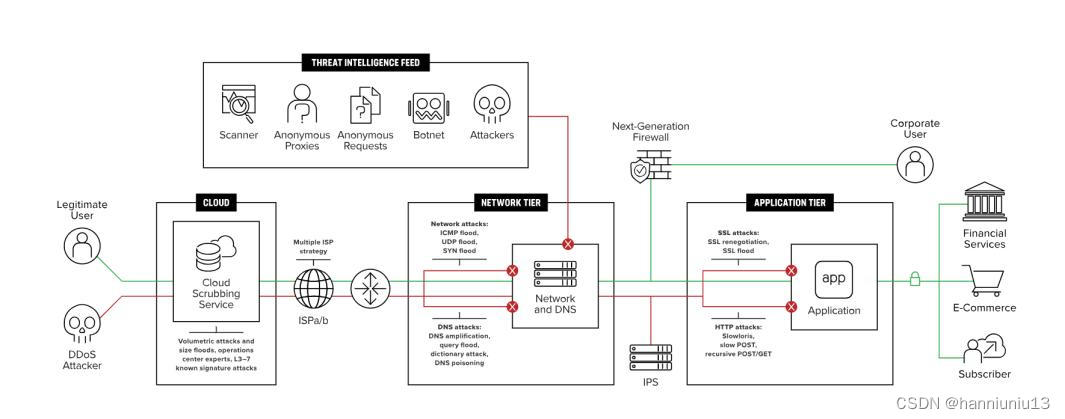
DDoS攻击愈演愈烈,谈如何做好DDoS防御
DDoS攻击是目前最常见的网络攻击方式之一,各种规模的企业包括组织机构都在受其影响。对于未受保护的企业来讲,每次DDoS攻击的平均成本为20万美元。可见,我们显然需要开展更多的DDoS防御工作。除考虑如何规避已发生的攻击外,更重要…...
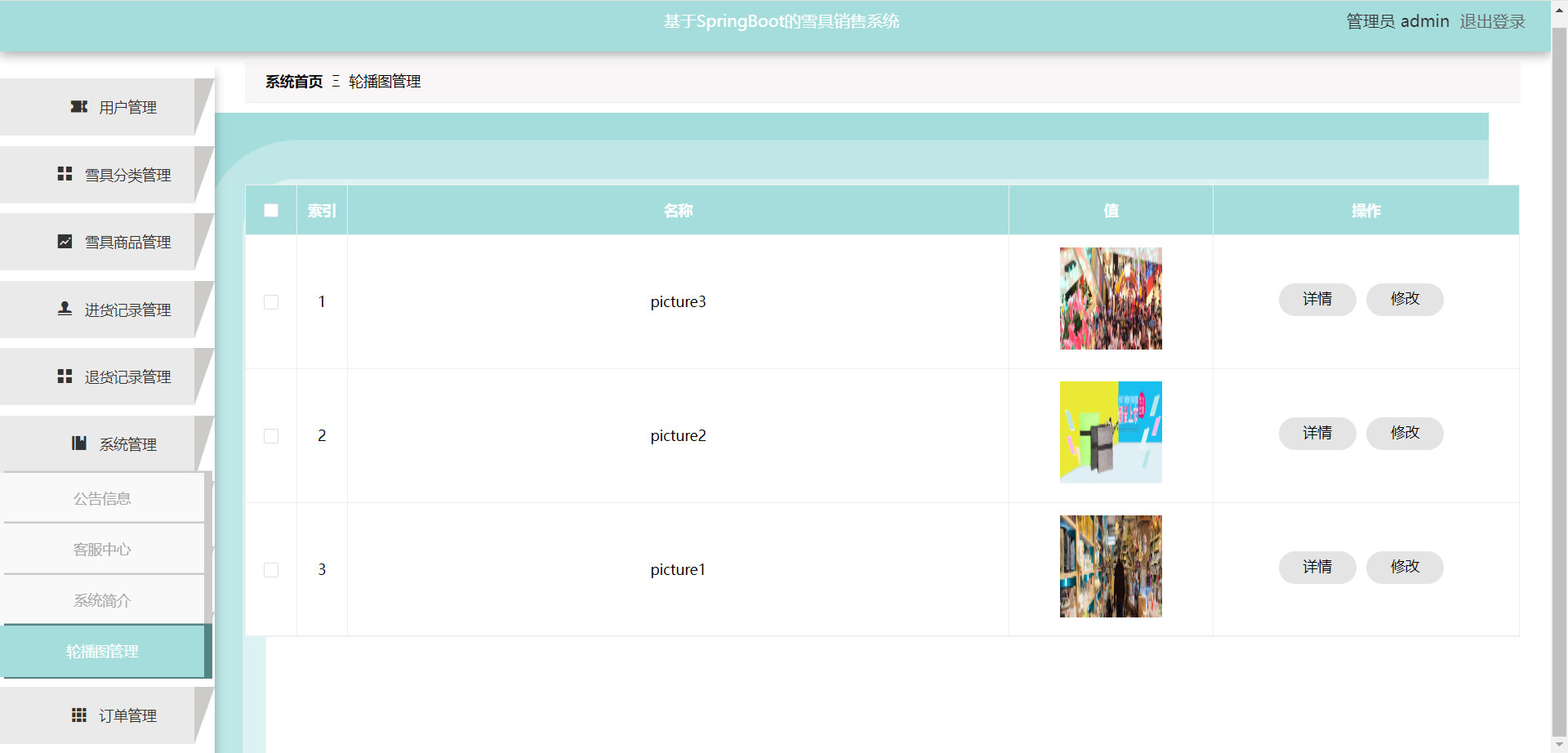
48.基于SpringBoot + Vue实现的前后端分离-雪具销售系统(项目 + 论文PPT)
项目介绍 本站是一个B/S模式系统,采用SpringBoot Vue框架,MYSQL数据库设计开发,充分保证系统的稳定性。系统具有界面清晰、操作简单,功能齐全的特点,使得基于SpringBoot Vue技术的雪具销售系统设计与实现管理工作系统…...
)
P8715 [蓝桥杯 2020 省 AB2] 子串分值 (双边检测)
# [蓝桥杯 2020 省 AB2] 子串分值 ## 题目描述 对于一个字符串 $S$, 我们定义 $S$ 的分值 $f(S)$ 为 $S$ 中恰好出现一次的字符个数。例如 $f\left({ }^{\prime \prime} \mathrm{aba}{ }^{\prime \prime}\right)1$,$f\left({ }^{\prime \prime} \mathrm{abc}{ }^{…...
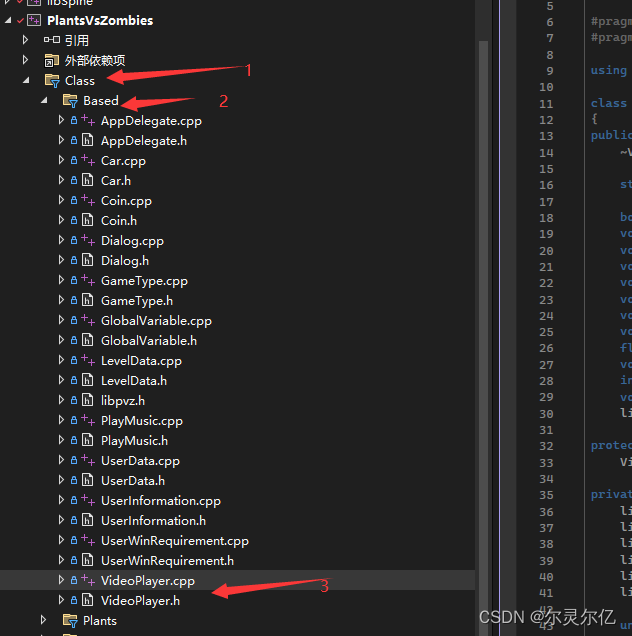
(十四)C++自制植物大战僵尸游戏windows平台视频播放实现
植物大战僵尸游戏开发教程专栏地址http://t.csdnimg.cn/8UFMs VLC库 在Cocos2d-x游戏开发框架中,没有实现windows平台视频播放的功能,需要自定义实现。在本项目中使用vlc库实现windows平台的视频播放功能。 vlc官网:网址 下载完成后&#x…...

深入理解GCC/G++在CentOS上的应用
文章目录 深入理解GCC/G在CentOS上的应用编译C和C源文件C语言编译C语言编译 编译过程的详解预处理编译汇编链接 链接动态库和静态库静态库和动态库安装静态库 结论 深入理解GCC/G在CentOS上的应用 在前文的基础上,我们已经了解了CentOS的基本特性和如何在其上安装及…...
】)
C语言【复合类型(自定义类型)】
一、结构体 结构体(struct)可以理解为用户自定义的特殊的复合的“数据类型”; 1. 结构体变量的定义和初始化 定义结构体变量的方式: 先声明结构体类型再定义变量名 在声明类型的同时定义变量 // 结构体类型的定义 struct stu {char name[50];int age;…...

【python】初识爬虫
Python爬虫介绍 目录 一、概述二、Python爬虫的基本构成爬虫引擎解析器数据存储三、Python爬虫的主要技术请求与响应URL管理页面解析数据存储四、Python爬虫的应用场景数据采集搜索引擎竞品分析价格监控五、Python爬虫的开发流程六、常用的库...
提高小红书底层逻辑认知+短视频思路打爆笔记+纯带货笔记起号(8节课)
课程内容: 小红书如何0押金开通店铺 .mp4 店铺基础搭建.mp4 小红营的流量从哪里来? 如何用养号发现优质的对标笔记?养号的真正意义是什么?.mp4 什么叫垂类标签? 账号如何打上正确的标签 .mp4 前期笔记是否挂车?不同类型的笔记审核标准是什么?.mp4 如何用…...

力扣:219. 存在重复元素 II
力扣:219. 存在重复元素 II 给你一个整数数组 nums 和一个整数 k ,判断数组中是否存在两个 不同的索引 i 和 j ,满足 nums[i] nums[j] 且 abs(i - j) < k 。如果存在,返回 true ;否则,返回 false 。 …...

程序安装 - 笔记
1 程序IOServer,依赖自己开发libs7.so.如何安装程序 要安装依赖于自己开发的 libs7.so 的程序 IOServer,你需要执行以下步骤: 编译 IOServer 程序:确保 IOServer 程序的源代码处于可用状态,并且已经编译成可执行文件。这可能需要执行诸如 make 或者其他编译命令,具体取决…...

GPT-Image-2提示词工程实战:从原理到应用,解锁高质量AI图像生成
1. 项目概述:一份高质量的GPT-Image-2提示词工程指南如果你正在使用OpenAI的GPT-Image-2模型,并且厌倦了反复尝试却只能得到平庸、不符合预期的图片,那么你找对地方了。我最近深度研究并实践了Anil-matcha维护的“Awesome GPT-Image-2 API Pr…...

深度学习草图到全栈代码生成:技术原理、实现挑战与工程实践
1. 项目概述:从草图到全栈应用的智能跃迁在软件开发领域,从产品原型到最终上线的代码实现,中间横亘着一条巨大的“实现鸿沟”。产品经理或设计师用Sketch、Figma等工具绘制出精美的界面草图,而工程师则需要将这些静态的视觉稿&…...

终极指南:Visual C++运行库一键修复完整教程
终极指南:Visual C运行库一键修复完整教程 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经遇到过打开软件时突然弹出"无法启动此程序…...

别再用眼睛猜阈值了!Halcon threshold函数实战:5分钟搞定车牌字符分割
工业视觉实战:Halcon阈值分割在车牌识别中的精准应用 在机器视觉领域,车牌识别系统是典型的工业应用场景之一。而字符分割作为识别流程中的关键环节,直接影响最终识别准确率。许多初学者往往陷入一个误区——仅凭肉眼观察随意设置阈值参数&am…...

开源创意资产管理平台Buddy:设计团队协作与版本控制实践
1. 项目概述:一个为创意协作而生的开源平台如果你在团队里负责过创意项目,无论是UI设计、视频剪辑还是产品原型开发,大概率都经历过这样的混乱:设计稿的版本号从V1.0一路飙升到V12_final_really_final.psd;开发同学在群…...

汽车芯片市场深度解析:从电动化、智能化到供应链变革
1. 汽车芯片行业:短期阵痛与长期增长的辩证观最近和几个在车厂和Tier 1供应商做研发的老朋友聊天,大家普遍的感觉是:冰火两重天。一边是终端市场感觉“卷”得厉害,销量波动、价格战不停;另一边,研发部门的芯…...

收藏必备!小白程序员轻松入门大模型:ReAct与Reflexion核心技术与实战应用
大语言模型(LLM)在复杂任务中存在事实幻觉、缺乏实时信息等局限。本文介绍ReAct和Reflexion两大提示技术框架,ReAct通过推理与行动协同,有效解决幻觉问题;Reflexion在ReAct基础上增加自我反思机制,形成闭环…...

工程师实战指南:从原理到选型,全面解析电池核心技术参数与应用
1. 项目概述:为什么我们需要重新认识电池?干了三十多年电气工程,从数字电路、模拟信号到电源设计、通信协议和微控制器,我几乎把电子行业的各个角落都摸了一遍。现在我在一家叫MaxVision的公司,专门搞那种性能极端、皮…...

芯片巨头并购软件公司:从硬件竞赛到软硬协同的产业变革
1. 行业现象背后的深层逻辑最近和几个在芯片设计公司和EDA软件公司工作的老朋友聊天,大家不约而同地提到了一个趋势:芯片巨头们的手,伸得越来越长了。以前是买IP核、买制造厂,现在则是频频出手,将一家家软件公司收入囊…...

3分钟掌握跨平台鼠标连点器:免费开源自动化工具快速上手指南
3分钟掌握跨平台鼠标连点器:免费开源自动化工具快速上手指南 【免费下载链接】MouseClick 🖱️ MouseClick 🖱️ 是一款功能强大的鼠标连点器和管理工具,采用 QT Widget 开发 ,具备跨平台兼容性 。软件界面美观 &#…...