HAL STM32 I2C方式读取MT6701磁编码器获取角度例程
HAL STM32 I2C方式读取MT6701磁编码器获取角度例程
- 📍相关篇《Arduino通过I2C驱动MT6701磁编码器并读取角度数据》
- 🎈《STM32 软件I2C方式读取MT6701磁编码器获取角度例程》
- 📌MT6701当前最新文档资料:
https://www.magntek.com.cn/upload/MT6701_Rev.1.8_%E4%B8%AD%E6%96%87%E7%89%88.pdf - 🔰MT6701芯片和AS5600从软件读取对比,只是读取的寄存器和访问的设备地址不同而已,所以稍作修改即可实现通用一个驱动模板。
📙MT6701 IIC接口电路
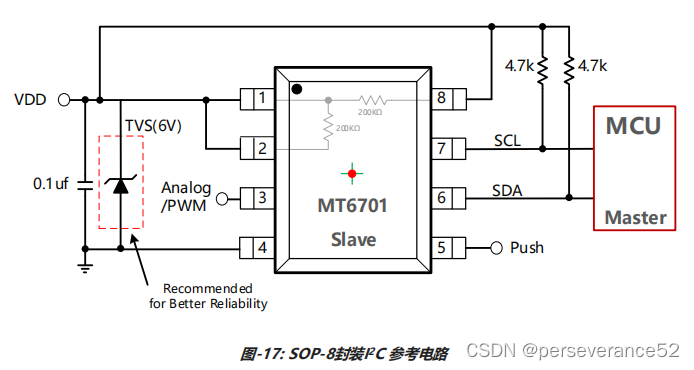
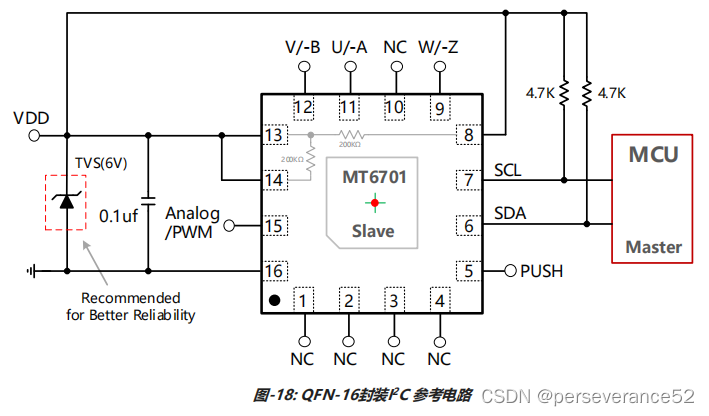
- 🔖 第八引脚,直接接到VCC,或者增加上拉电阻也可以。
⛳MT6701 I2C 读取角度操作
MT6701做为I2C从机的地址是b’0000110(这一地址可以通过编程改为b’1000110 )。14位绝对角度数据(2的14次方,16384)保存在0x03和0x04寄存器中,请按照如图-20所示的读取0x03和0x04的角度数据。
注意:要先读0x03,再读0x04。

⛳注意事项
- ✨在MT6701芯片和径向磁铁一定要保持稳定的空间距离,一旦空间距离有较大的变化,在读取MT6701芯片寄存器数据就可能出现最大值情况。在检测时,芯片和径向磁铁轴向和径向都需要相对稳定。
- 🌟在选择通讯线材上,尽量选择好一点的线材,如果使用杜邦线连接,最好将连接线独立分开的单根进行连接,不要使用并排的杜邦线进行连接,对使用硬件I2C通讯有很大的影响。甚至读取不到,软件方式对这方面要求没有这么高。
📒EEPROM编程
- 🌿相关寄存器位:

- 📜编程步骤:

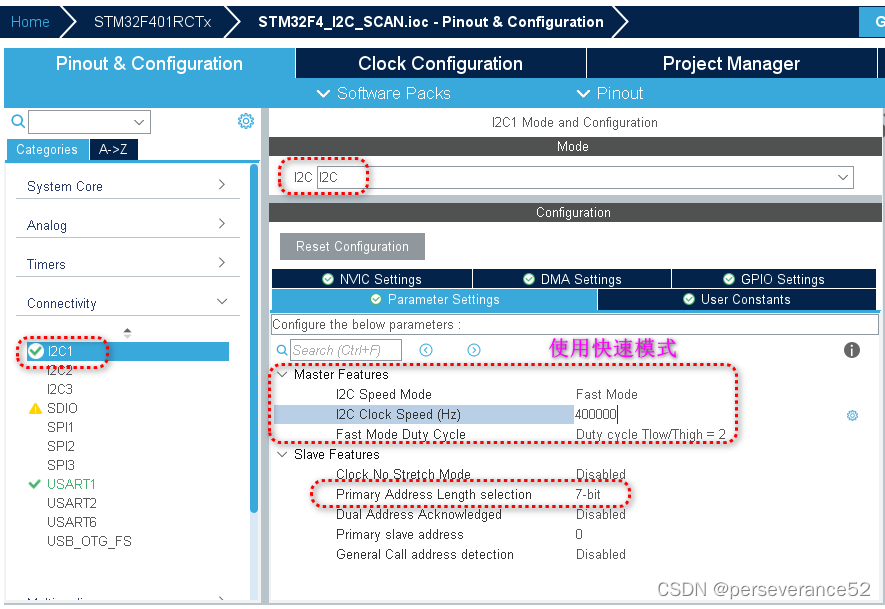
📓STM32CubeMX配置
- 🌿选择一个I2C接口:(快速模式:400KHz,普通模式:100KHz)
📙业务代码
- 🌿对I2C设备地址扫描实现:
printf("Scanning I2C bus:\r\n");HAL_StatusTypeDef result;for (uint8_t i=1; i<255; i++){/** the HAL wants a left aligned i2c address* &hi2c1 is the handle* (uint16_t)(i<<1) is the i2c address left aligned* retries 2 重复次数* timeout 20 超时MT6701 i2c address:(0xC = 0x6 << 1)*/result = HAL_I2C_IsDeviceReady(&hi2c1, (uint16_t)(i<<1), 2, 20);// result = HAL_I2C_Master_Transmit(&hi2c1,(uint16_t)i<<1,0,0,20); //同上if (result != HAL_OK) // HAL_ERROR or HAL_BUSY or HAL_TIMEOUT{printf("."); // No ACK received at that address}if (result == HAL_OK){printf("0x%X", i); // Received an ACK at that address}}printf("\r\n");

- 可以扫描到3个地址,其中第一个0x6为MT6701真正的地址。
- 🌿读取角度数据实现:
/* SlaveAddress:0x6<<1 * IIC 方式读取角度信息* 返回数据为 0 ~ 360 之间的浮点数*/
float Read_Angle(void)
{uint32_t angle = 0;float fangle = 0.0f;uint8_t ReadBuffer1,ReadBuffer2;HAL_I2C_Mem_Read(&hi2c1,0xc,0x3,I2C_MEMADD_SIZE_8BIT,&ReadBuffer1,1,0XFF);angle = ReadBuffer1;angle <<= 8;HAL_I2C_Mem_Read(&hi2c1,0xc,0x4,I2C_MEMADD_SIZE_8BIT,&ReadBuffer2,1,0XFF);angle += ReadBuffer2;angle >>= 2; //取数据高 14 位fangle = (float)(angle * 360.0f) / 16384.0f;return fangle;
}
- 🌿方向读取
#define DIR_RES 0X29 //数据高位寄存器地址
uint8_t Read_DIR(void)
{uint8_t DIR=0;HAL_I2C_Mem_Read(&hi2c1,SlaveAddress,DIR_RES,I2C_MEMADD_SIZE_8BIT,&DIR,1,0XFF);return (DIR&0x2);
}
- 🌿ABZ输出分辨率(脉冲圈)读取
#define Abz_ResH 0X30 //数据高位寄存器地址
#define Abz_ResL 0X31 //数据低位寄存器地址
uint16_t Read_ABZ(void)
{uint16_t AbzRes = 0;uint8_t ReadBuffer1,ReadBuffer2;HAL_I2C_Mem_Read(&hi2c1,SlaveAddress,Abz_ResH,I2C_MEMADD_SIZE_8BIT,&ReadBuffer1,1,0XFF);AbzRes = ReadBuffer1&0x3;AbzRes <<= 8;HAL_I2C_Mem_Read(&hi2c1,SlaveAddress,Abz_ResL,I2C_MEMADD_SIZE_8BIT,&ReadBuffer2,1,0XFF);AbzRes += ReadBuffer2;return AbzRes;
}
- 🌿通过 EEPROM编程,改变编码器方向。(默认是逆时针递增)
void programmEEPROM(void)
{uint8_t DIR=0;uint8_t KEY1=0xB3;uint8_t KEY2=0x05;HAL_I2C_Mem_Read(&hi2c1,SlaveAddress,DIR_RES,I2C_MEMADD_SIZE_8BIT,&DIR,1,0XFF);DIR ^= 1<<1; //方向翻转HAL_I2C_Mem_Write(&hi2c1,SlaveAddress,DIR_RES,I2C_MEMADD_SIZE_8BIT,&DIR,1,0XFF);HAL_I2C_Mem_Write(&hi2c1,SlaveAddress,0x09,I2C_MEMADD_SIZE_8BIT,&KEY1,1,0XFF);HAL_I2C_Mem_Write(&hi2c1,SlaveAddress,0x0A,I2C_MEMADD_SIZE_8BIT,&KEY2,1,0XFF);HAL_Delay(800);}
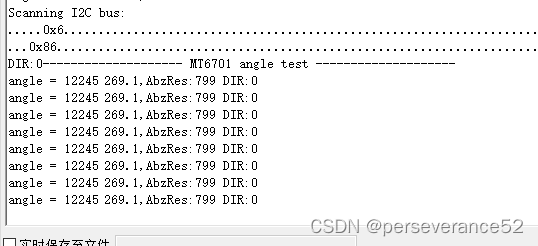
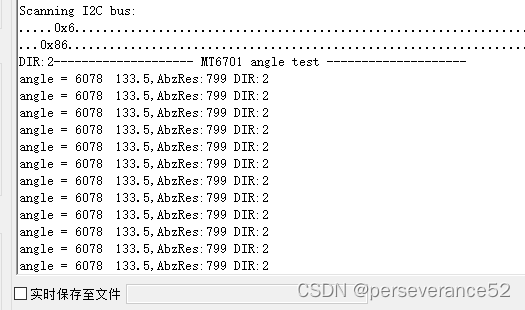
- 📝测试代码
int main(void)
{/* USER CODE BEGIN 1 */int16_t angle;float angle_f;uint8_t dir=0;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_I2C1_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */printf("Scanning I2C bus:\r\n");HAL_StatusTypeDef result;for (uint8_t i=1; i<255; i++){/** the HAL wants a left aligned i2c address* &hi2c1 is the handle* (uint16_t)(i<<1) is the i2c address left aligned* retries 2 重复次数* timeout 20 超时MT6701 i2c address:(0xC = 0x6 << 1)*/
// result = HAL_I2C_IsDeviceReady(&hi2c1, (uint16_t)(i<<1), 2, 20);result = HAL_I2C_Master_Transmit(&hi2c1,(uint16_t)i<<1,0,0,20); //同上if (result != HAL_OK) // HAL_ERROR or HAL_BUSY or HAL_TIMEOUT{printf("."); // No ACK received at that address}if (result == HAL_OK){printf("0x%X", i); // Received an ACK at that address}}printf("\r\n");dir = Read_DIR() ;printf("DIR:%d",dir);HAL_Delay(200);
#if defined(PROGRAM_ENABLE)printf("-------------------- MT6701 programm test --------------------\r\n");programmEEPROM();
#endifHAL_Delay(3000);dir = Read_DIR() ;printf("-------------------- MT6701 angle test --------------------\r\n");/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */
// i2c_mt6701_get_angle(&angle, &angle_f);
// printf("angle = %d\t%.03f\r\n", angle, angle_f);
// angle_f = Read_Angle();
// printf("angle= %.1f\r\n", angle_f);i2c_mt6701_get_angle(&angle, &angle_f);uint16_t AbzRes = Read_ABZ(); printf("Raw_Angle = %d\tAngle:%.1f,AbzRes:%d DIR:%d\r\n", angle, angle_f,AbzRes,dir);HAL_Delay(500);HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin);}/* USER CODE END 3 */
}
📚测试工程
- 🌿硬件I2C方式
链接:https://pan.baidu.com/s/1l4gElhcqn6mg6cWYaHG4Wg?pwd=kuub
提取码:kuub
- 🌿硬件I2C中断方式
链接:https://pan.baidu.com/s/1W2vZRmQPNe4VU6dKFc9xJQ?pwd=tzfl
提取码:tzfl
相关文章:
HAL STM32 I2C方式读取MT6701磁编码器获取角度例程
HAL STM32 I2C方式读取MT6701磁编码器获取角度例程 📍相关篇《Arduino通过I2C驱动MT6701磁编码器并读取角度数据》🎈《STM32 软件I2C方式读取MT6701磁编码器获取角度例程》📌MT6701当前最新文档资料:https://www.magntek.com.cn/u…...

如何排查nginx服务启动情况,杀死端口,以及防火墙开放指定端口【linux与nginx排查手册】
利用NGINX搭建了视频服务,突然发现启动不了了,于是命令开始 使用以下命令查看更详细的错误信息: systemctl status nginx.service Warning: The unit file, source configuration file or drop-ins of nginx.service changed on disk. Run…...

用Rust实现免费调用ChatGPT的命令行工具 (一)
代码已经开源:🚀 fgpt 欢迎大家star⭐和fork 👏 ChatGPT现在免费提供了GPT3.5的Web访问,不需要注册就可以直接使用,但是,它的使用方式是通过Web页面,不够方便。 更多技术分享关注 入职啦&…...

mysql 查询实战1-题目
学习了mysql 查询实战-变量方式-解答-CSDN博客,接着练习sql,从实战中多练习。 1,题目: 1,查询部门工资最高的员工 1,建表: DROP TABLE IF EXISTS department; create table department(dept_i…...

Word学习笔记之奇偶页的页眉与页码设置
1. 常用格式 在毕业论文中,往往有一下要求: 奇数页右下角显示、偶数页左下角显示奇数页眉为每章标题、偶数页眉为论文标题 2. 问题解决 2.1 前期准备 首先,不论时要求 1、还是要求 2,这里我们都要做一下设置: 鼠…...
数据赋能(58)——要求:数据赋能实施部门能力
“要求:数据赋能实施部门能力”是作为标准的参考内容编写的。 在实施数据赋能中,数据赋能实施部门的能力体现在多个方面,关键能力如下图所示。 在实施数据赋能的过程中,数据赋能实施部门应具备的关键能力如下。 理性思维与逻辑分…...
Unity URP PBR_Cook-Torrance模型
Cook-Torrance模型是一个微表面光照模型,认为物体的表面可以看作是由许多个理想的镜面反射体微小平面组成的。 单点反射镜面反射漫反射占比*漫反射 漫反射 基础色/Π 镜面反射DFG/4(NV)(NL) D代表微平面分布函数,描述的是法线与半角向量normalize(L…...
Unity之XR Interaction Toolkit如何在VR中实现渐变黑屏效果
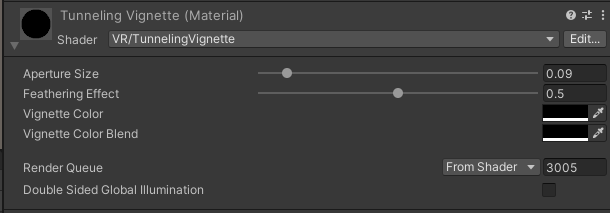
前言 做VR的时候,有时会有跳转场景,切换位置,切换环境,切换进度等等需求,此时相机的画面如果不切换个黑屏,总会感觉很突兀。刚好Unity的XR Interaction Toolkit插件在2.5.x版本,出了一个TunnelingVignette的效果,我们今天就来分析一下他是如何使用的,然后我们自己再来…...
html+vue编写分页功能
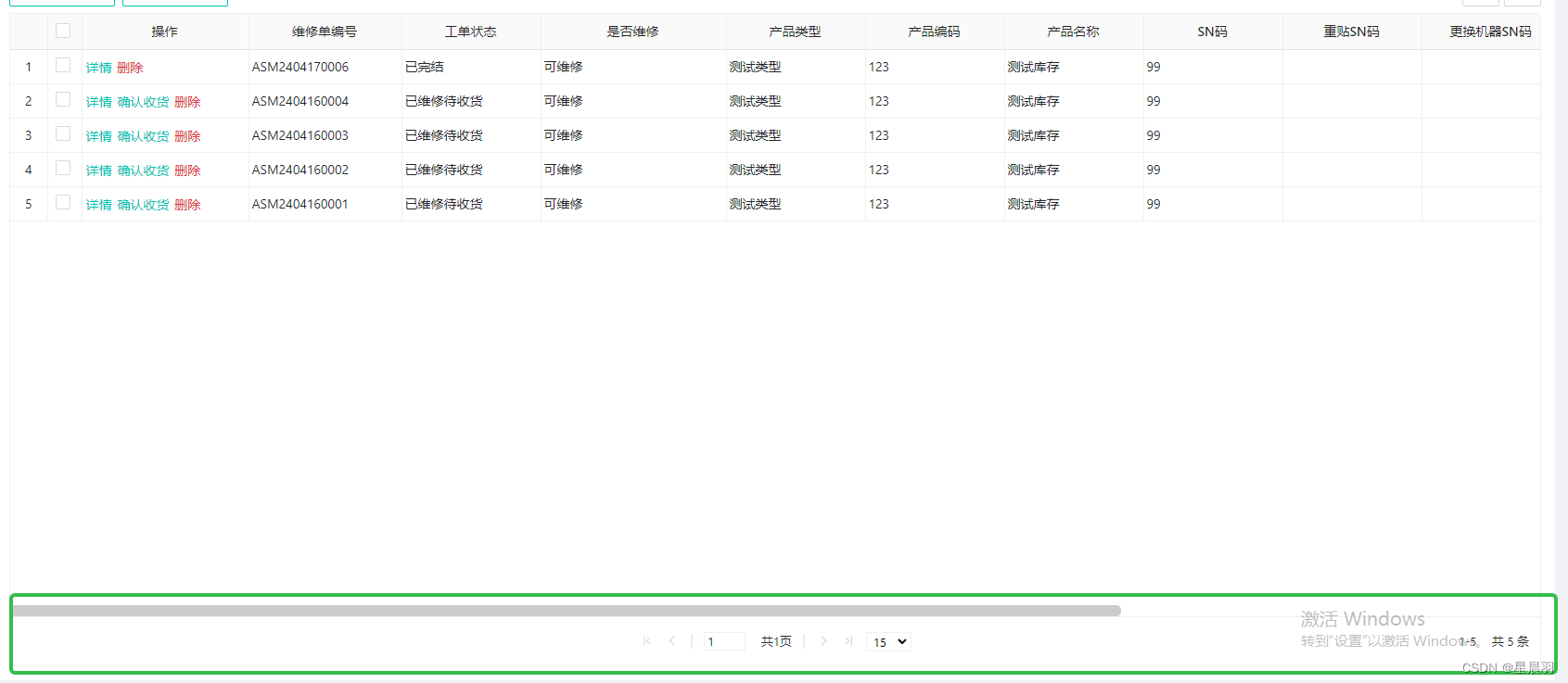
效果: html关键代码: <div class"ui-jqgrid-resize-mark" id"rs_mlist_table_C87E35BE"> </div><div class"list_component_pager ui-jqgrid-pager undefined" dir"ltr"><div id"pg…...
计算机网络 实验指导 实验17
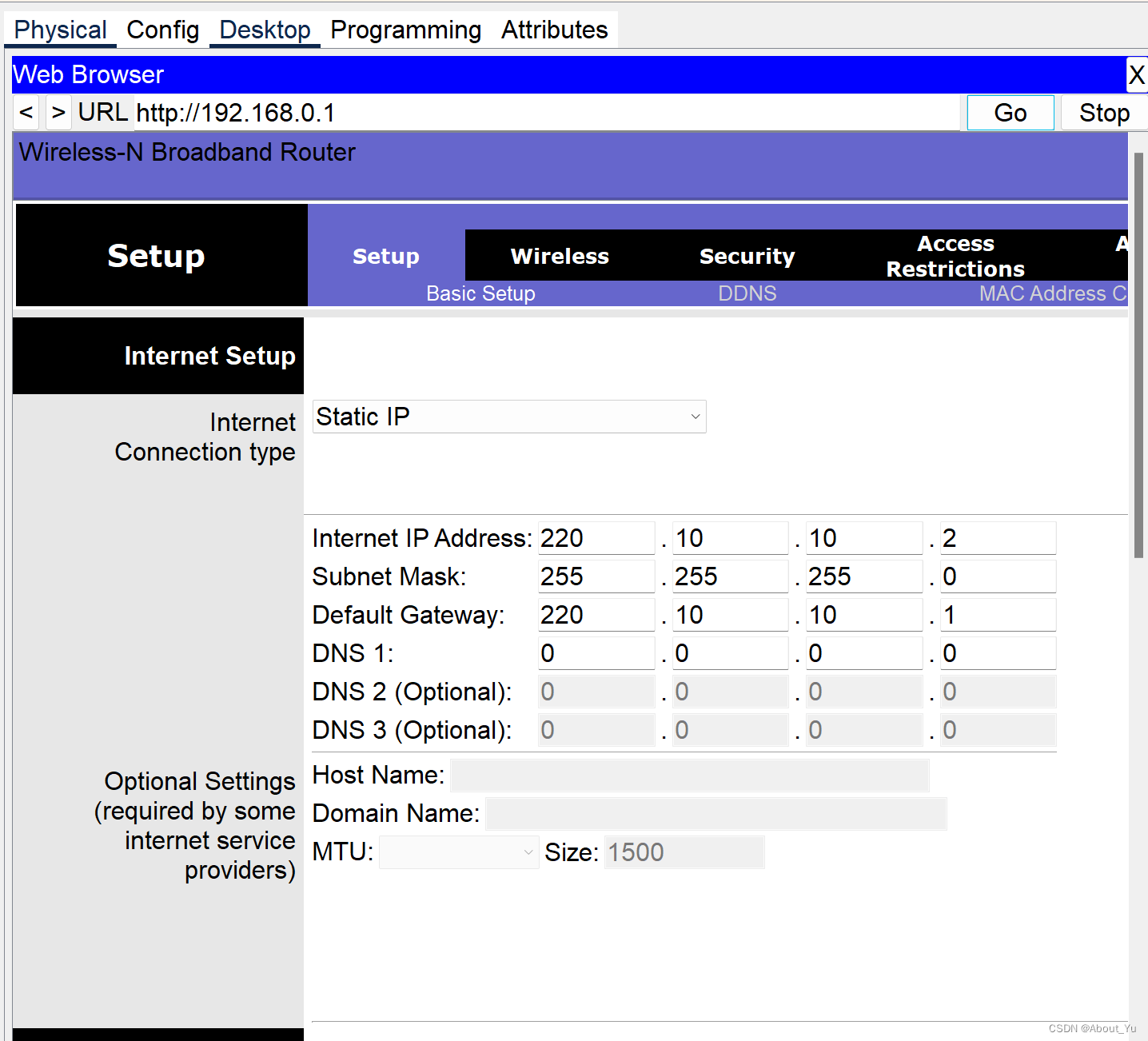
实验17 配置无线网络实验 1.实验拓扑图 Table PC0 和 Table PC1 最开始可能还会连Access Point0,无影响后面会改 名称接口IP地址网关地址Router0fa0/0210.10.10.1fa0/1220.10.10.2Tablet PC0210.10.10.11Tablet PC1210.10.10.12Wireless互联网220.10.10.2LAN192.16…...

在 Vue中,v-for 指令的使用
在 Vue中,v-for 指令用于渲染一个列表,基于源数据多次渲染元素或模板块。它对于展示数组或对象中的数据特别有用。 数组渲染 假设你有一个数组,并且你想为每个数组元素渲染一个 <li> 标签: <template> <ul>…...

达梦数据库执行sql报错:数据溢出
数据库执行sql报错数据溢出 单独查询对应的数字进行计算是不是超过了某个字段类型的上限或下限 如果已经超过了,进行对字段进行cast类型转换处理,转换为dec num都可以尝试 这里就是从 max(T.BLOCK_ID as dec*8192t.bytes)/1024/1024 max_MB,换成了这个…...

从「宏大叙事」到「生活叙事」,小红书品牌种草的的“正确姿势”
不同于抖音和微博,在小红书上,品牌营销的基调应该是怎样的?品牌怎样与小红书用户对话?什么样的内容,才能走进小红书用户的心中?本期,小编将带大家洞察品牌在小红书营销的“正确姿势”。从「小美…...

Python Selenium 的基本使用方法
文章目录 1. 概述2. 安装Chrome及ChromeDriver2.1 安装Chrome2.2 安装ChromeDriver 3. 安装Selenium4. 常见用法4.1 启动4.2 查找元素4.3 等待页面加载元素 1. 概述 Selenium 是一个用于自动化 web 浏览器的工具,它提供了一套用于测试 web 应用程序的工具和库。Sel…...
上位机图像处理和嵌入式模块部署(树莓派4b固件功能设计)
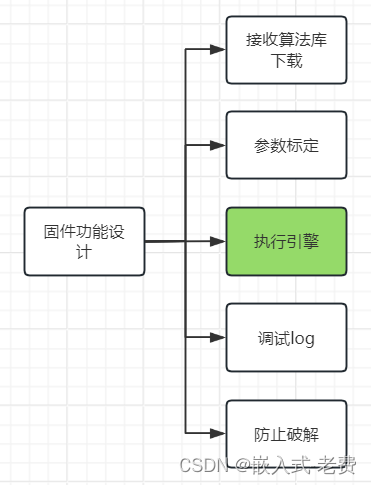
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 前面我们说过,上位机的功能都是基于插件进行开发的。但是上位机的成本比较贵,一般的企业不一定愿意接接受。这个时候另外一…...

新手入门人工智能:从零开始学习AI的正确途径
你是否对人工智能(AI)充满了好奇心和探索欲?你是否想了解如何从零开始学习AI,成为一名人工智能领域的专家?那么,这篇文章就是为你准备的!我们将带你了解人工智能的基本概念,学习如何…...

ubuntu git相关操作
1 安装git sudo apt install git git --version git version 2.25.1 2 解决git超时 2.1 扩大post的buffer git config --global http.postBuffer 524288000 git config --global http.postBuffer 157286400 2.2 换回HTTP1上传。上传之后再切换回HTTP2 …...
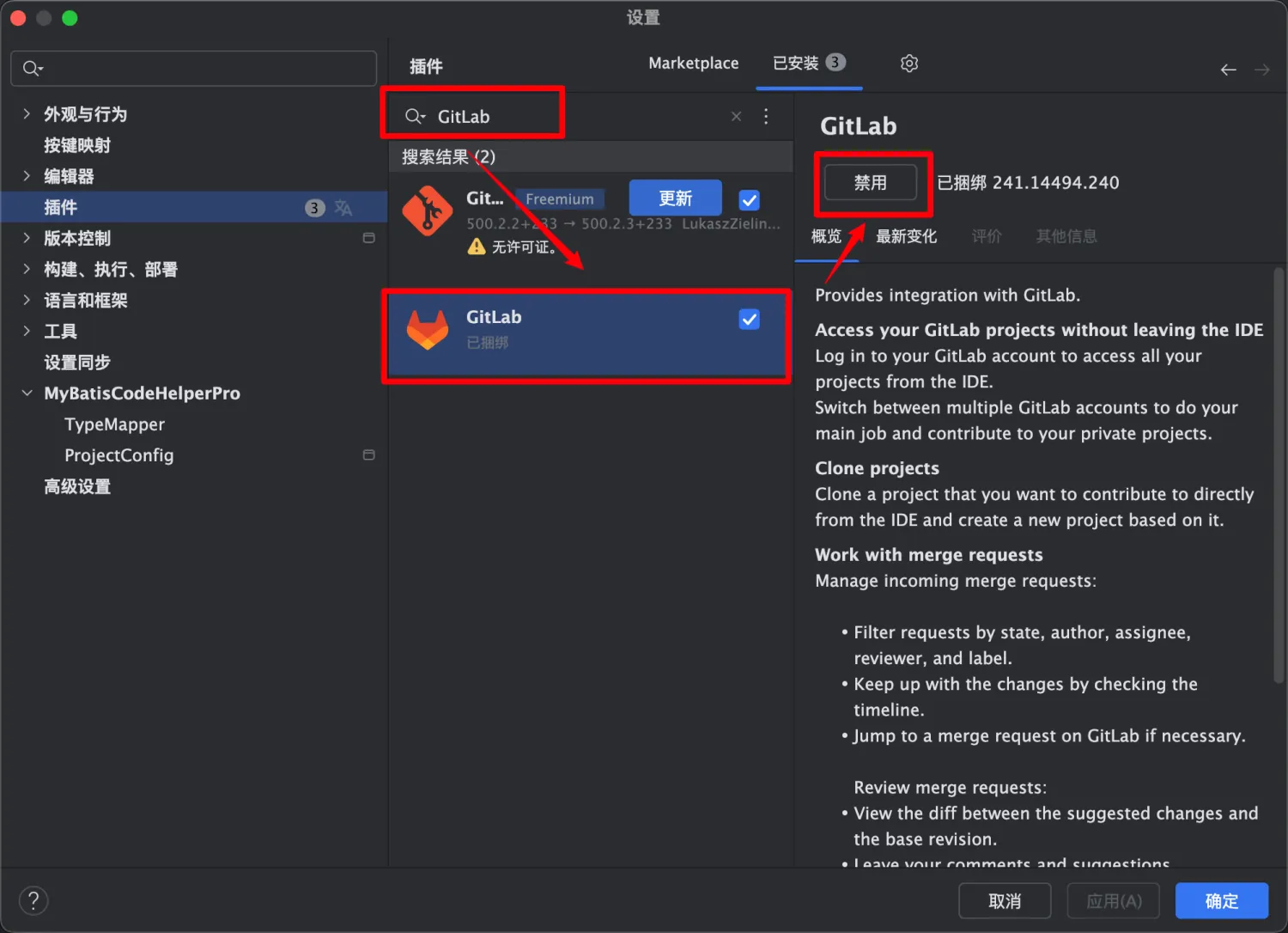
IDEA工具|添加 GitLab 账户之两三事
📫 作者简介:「六月暴雪飞梨花」,专注于研究Java,就职于科技型公司后端工程师 🏆 近期荣誉:华为云云享专家、阿里云专家博主、腾讯云优秀创作者、ACDU成员 🔥 三连支持:欢迎 ❤️关注…...
)
蓝桥杯:棋盘(Java)
目录 问题描述输入格式输出格式代码实现 问题描述 小蓝拥有n n大小的棋盘,一开始棋盘上全都是白子。小蓝进行了m.次操作,每次操作会将棋盘上某个范围内的所有棋子的颜色取反(也就是白色棋子变为黑色,黑色棋子变为白色)。请输出所…...

跨界融合:ERP与TMS的区分、相通之处、融合方式,全告诉你。
Hi,如今系统的边界越来越模糊,A系统和B系统会有一些功能的交叉,贝格前端工场今天开始介绍第二篇ERP和TMS的融合。 一、什么是ERP和TMS ERP是企业资源规划(Enterprise Resource Planning)的缩写,是一种集成…...
)
老笔记本焕发第二春:微星GT60升级GTX1060保姆级避坑指南(含硬件ID修改)
微星GT60笔记本升级GTX1060全流程实战:从硬件改造到驱动破解 当手头的微星GT60笔记本逐渐跟不上现代游戏需求时,许多玩家会考虑升级显卡来延续它的使用寿命。MXM接口的GTX1060显卡因其性价比和性能表现成为热门选择,但整个升级过程充满技术陷…...

从零构建:深入理解自治系统与BGP协议的核心机制
1. 自治系统与BGP协议的前世今生 第一次听说"自治系统"这个词时,我脑海中浮现的是科幻电影里的智能机器人。实际上,它指的是互联网中由单一组织管理的网络区域。想象一下,每个自治系统就像城市里的一个独立社区,有自己的…...

大疆智图+B3DM切片+Cesium:5分钟搞定倾斜摄影三维模型在线发布
大疆智图B3DM切片Cesium:零代码实现倾斜摄影三维模型Web发布全指南 当无人机航拍的倾斜摄影数据需要快速在Web端展示时,技术栈的衔接往往成为最大障碍。本文将手把手带您实现从大疆智图生成B3DM切片到Cesium可视化呈现的完整流程,全程无需编写…...

Windows Cleaner专业级深度优化实战:高效解决C盘空间不足与系统卡顿难题
Windows Cleaner专业级深度优化实战:高效解决C盘空间不足与系统卡顿难题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner Windows Cleaner是一款基于Py…...

【JWT】JWS与JWE实战解析:从结构差异到安全选型指南
1. JWT、JWS与JWE的核心概念解析 第一次接触JWT相关技术时,我也曾被各种缩写搞得晕头转向。直到在真实项目中踩过几次坑,才真正理解它们之间的关系。简单来说,JWT就像是一个快递包裹,而JWS和JWE则是两种不同的包装方式——前者像…...

AI 搜索重新重视来源:内容平台的新机会不是被点击,而是被正确引用
生成式搜索刚出现时,很多内容创作者最担心的问题是:如果答案直接出现在搜索页,用户还会不会点进原文?这个担心并不多余。AI Overviews、AI Mode 和各类答案引擎,确实改变了“搜索结果页到网页”的传统路径。但现在更值…...

Keil 5 Debug隐藏技巧:手把手教你配置软件仿真,避开‘no read permission’等常见报错
Keil 5 Debug高阶实战:从软件仿真配置到逻辑分析仪深度应用 在嵌入式开发领域,Keil MDK作为ARM架构的主流开发环境,其Debug功能尤其是软件仿真模块往往被开发者低估。许多工程师仅停留在基础调试层面,对逻辑分析仪等高级功能要么望…...
)
手把手教你给天邑TY1608机顶盒刷机(S905L3B芯片,支持RTL8822CS/MT7668无线模块)
天邑TY1608机顶盒刷机全攻略:从零开始玩转S905L3B芯片 第一次拿到天邑TY1608机顶盒时,你可能被它原厂系统的各种限制所困扰——预装软件无法卸载、广告弹窗频繁出现、存储空间严重不足。这款搭载Amlogic S905L3B芯片的设备,配合RTL8822CS或MT…...

Windows安卓应用安装器:快速轻量级解决方案终极指南
Windows安卓应用安装器:快速轻量级解决方案终极指南 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 想在Windows电脑上轻松安装安卓应用吗?厌倦…...

形式化验证实战指南:从数学证明到芯片验证工程实践
1. 从一封邀请函说起:为什么我们还在谈论形式化验证?前几天整理旧资料,翻出了一封2011年的邮件,标题是“Youre invited to Jaspers annual user group meeting”。发件人是EE Times的编辑Clive Maxfield,内容是关于Jas…...