C++之Eigen库基本使用
目录
1、矩阵的构造和初始化操作
2、矩阵的算术运算
3、矩阵的分解和求解
4、矩阵的变换
5、矩阵的访问和修改
6、矩阵遍历
7、线性方程组求解
8、其他操作
Eigen库是一个高级的C++库,用于线性代数,矩阵和向量运算,数值分析和相关的数学运算。这个库提供了大量的矩阵操作功能。
1、矩阵的构造和初始化操作
Eigen::Matrix3f A; // 创建一个3x3的双精度浮点型矩阵A << 1, 2, 3, 4, 5, 6, 7, 8, 9;cout<<"3X3 float: \n"<<A<<endl;Eigen::MatrixXf m = Eigen::MatrixXf::Identity(3, 3); // 创建一个3x3的单位矩阵cout<<"3X3 identity: \n"<<m<<endl;Eigen::MatrixXf mf(3, 3); // 使用构造函数初始化,默认初始化为0 Eigen::MatrixXi mi(3, 3); // 创建一个3x3的整型矩阵,默认初始化为0cout<<"3X3 mf: \n"<<mf<<endl;cout<<"3X3 mi: \n"<<mi<<endl;Eigen::MatrixXf z = Eigen::MatrixXf::Zero(3, 3); // 创建一个3x3的全0矩阵Eigen::MatrixXi n = Eigen::MatrixXi::Ones(3, 3); // 创建一个3x3的全1矩阵cout<<"3X3 Zero: \n"<<z<<endl;cout<<"3X3 Ones: \n"<<n<<endl;Eigen::MatrixXf r = Eigen::MatrixXf::Random(3, 3); // 创建一个3x3的随机矩阵cout<<"3X3 random: \n"<<r<<endl;float data[9] = {1, 2, 3, 4, 5, 6, 7, 8, 9};Eigen::Map<Eigen::MatrixXf> mp(data, 3, 3); // 将data数组映射为一个3x3的矩阵cout<<"3X3 map mp: \n"<<mp<<endl;Eigen::MatrixXf m_i(3, 3);m_i = (Eigen::MatrixXf(3, 3)<<1, 2, 3, 4, 5, 6, 7, 8, 9).finished(); //对于动态大小的矩阵,可以使用逗号初始化器,但需要在初始化时指定大小cout<<"initializer m_i: \n"<<m_i<<endl;Eigen::MatrixXf m_c = m_i;cout<<"copy constructor m_c : \n"<<m_c<<endl;2、矩阵的算术运算
Eigen::MatrixXf m1 = Eigen::MatrixXf::Identity(3, 3);Eigen::MatrixXf m2 = Eigen::MatrixXf::Identity(3, 3);Eigen::Matrix3f sum = m1 + m2; // 矩阵加法 cout<<"sum : \n"<<sum<<endl;Eigen::MatrixXf diff = m1 + m2; // 矩阵减法 cout<<"diff : \n"<<diff<<endl;Eigen::MatrixXf scaled = m1 * 2.0f; // 矩阵与标量的乘法 cout<<"scaled : \n"<<scaled<<endl;Eigen::MatrixXf product = m1 * m2.transpose(); // 矩阵乘法cout<<"product : \n"<<product<<endl;// 矩阵加法
Eigen::Matrix3f C = A + A;// 矩阵乘法
Eigen::Matrix3f D = A * A.transpose();// 向量加法
Eigen::Vector4f e = b + b;// 点积(内积)
float dotProduct = b.dot(b);// 转置
std::cout << "Transpose of A:\n" << A.transpose() << std::endl;// 访问元素
std::cout << "Element (1, 1) of A: " << A(1, 1) << std::endl;
3、矩阵的分解和求解
Eigen::MatrixXf m1 = Eigen::Matrix3f::Random();cout << "original matrix:\n" << m1 << endl;// 对矩阵进行特征值分解Eigen::EigenSolver<Eigen::Matrix3f> es(m1);cout << "eigenvalues:\n" << es.eigenvalues() << endl; cout << "eigenvectors:\n" << es.eigenvectors() << endl; // 假设我们有一个线性方程组 Ax = bEigen::Vector3f b(1, 2, 3);cout << "vector b:\n" << b << endl;// 使用列主元QR分解求解线性方程组Eigen::Vector3f x = m1.colPivHouseholderQr().solve(b);cout << "Solution x:\n" << x << endl;4、矩阵的变换
Eigen::MatrixXf m1 = Eigen::Matrix4f::Random();cout << "original matrix:\n" << m1 << endl;// 获取矩阵的转置 Eigen::Matrix4f transposed = m1.transpose();cout << "transposed:\n" << transposed << endl; // 获取矩阵的对角线元素Eigen::Vector4f diagonal = m1.diagonal();cout << "diagonal:\n" << diagonal << endl; // 获取矩阵的逆(注意:需要先检查矩阵是否可逆)if(m1.determinant() != 0) // 使用行列式检查是否可逆{// 求逆矩阵Eigen::Matrix4f inv_m = m1.inverse();cout << "inverse:\n" << inv_m << endl; // 验证逆矩阵的正确性:m * inv_m 应该接近单位矩阵Eigen::MatrixXf identity_check = m1 * inv_m;cout << "identity check:\n" << identity_check << endl; }else { cerr << "Matrix is singular and cannot be inverted." << endl; } 5、矩阵的访问和修改
Eigen::MatrixXf m1 = Eigen::Matrix4f::Random();cout << "original matrix:\n" << m1 << endl;// 取出前3行和前3列的子矩阵Eigen::Matrix3f sub_matrix = m1.block(0, 0, 3, 3);cout << "sub_matrix:\n" << sub_matrix << endl;// 修改矩阵的元素 m1(1, 2) = 10; // 将第2行第3列的元素设置为10// 访问矩阵的元素cout << "Element at (1, 2): " << m1(1, 2) << endl;// 访问矩阵的第2行 Eigen::Vector4f row = m1.row(1);cout << "row 2: " << row << std::endl;// 访问矩阵的第2列 Eigen::Vector4f col = m1.col(1);cout << "col 2: " << col << std::endl;Eigen::MatrixXf m2 = Eigen::Matrix3f::Random();cout << "original matrix:\n" << m2 << endl;// 创建一个4x4的矩阵,并初始化 Eigen::Matrix4f m4_4= Eigen::Matrix4f::Zero();// 将3x3矩阵赋值给4x4矩阵的前3行和前3列 m4_4.block(0, 0, 3, 3) = m2;cout << "4x4 matrix with 3x3 block assigned:\n" << m4_4 << endl;
//块操作
// 提取矩阵的第二列
Eigen::Vector3f column = A.col(1);// 提取矩阵的前两行
Eigen::Matrix2f topRows = A.topRows(2);
6、矩阵遍历
3.1 使用迭代器遍历和打印#include <iostream>
#include <Eigen/Dense>int main() {Eigen::MatrixXd mat(3, 4);mat << 1, 2, 3, 4,5, 6, 7, 8,9, 0, 1, 2;// 遍历并打印矩阵的每一行for (int row = 0; row < mat.rows(); ++row) {for (Eigen::MatrixXd::RowIterator it = mat.row(row).begin(); it != mat.row(row).end(); ++it) {std::cout << *it << ' ';}std::cout << '\n';}Eigen::VectorXd vec(5);vec << 3, 6, 9, 12, 15;// 遍历并打印向量的所有元素for (Eigen::VectorXd::Iterator it = vec.begin(); it != vec.end(); ++it) {std::cout << *it << ' ';}std::cout << '\n';return 0;
}3.2 直接访问元素并打印
#include <iostream>
#include <Eigen/Dense>int main() {Eigen::MatrixXd mat(3, 4);mat << 1, 2, 3, 4,5, 6, 7, 8,9, 0, 1, 2;// 遍历并打印矩阵的每一行for (int row = 0; row < mat.rows(); ++row) {for (int col = 0; col < mat.cols(); ++col) {std::cout << mat(row, col) << ' ';}std::cout << '\n';}Eigen::VectorXd vec(5);vec << 3, 6, 9, 12, 15;// 遍历并打印向量的所有元素for (int i = 0; i < vec.size(); ++i) {std::cout << vec(i) << ' ';}std::cout << '\n';return 0;
}7、线性方程组求解
// 假设A是已知的系数矩阵,b是已知的右侧向量
Eigen::VectorXd x;
Eigen::MatrixXd A(3, 3);
Eigen::VectorXd b(3);// ... 初始化A和b ...// 使用LLT分解求解Ax=b
Eigen::LLT<Eigen::MatrixXd> llt(A);
if (llt.info() == Eigen::Success) {x = llt.solve(b);
} else {std::cerr << "LLT decomposition failed!" << std::endl;
}// 输出解
std::cout << "Solution: " << x << std::endl;8、其他操作
Eigen::Matrix3f m1; // 创建一个3x3的双精度浮点型矩阵m1 << 1, 2, 3, 4, 5, 6, 7, 8, 9;// 计算矩阵的Frobenius范数float norm = m1.norm();cout << "norm of the matrix: " << norm << endl;Eigen::Matrix3f m2; // 创建一个3x3的双精度浮点型矩阵m2 << 1, 2, 3, 4, 5, 6, 7, 8, 9.0001f;// 检查两个矩阵是否近似相等(这里使用1e-5作为精度阈值)bool are_approx = m1.isApprox(m2, 1e-5);cout << "are m1 and m2 approximately equal? " << (are_approx ? "Yes" : "No") << endl;相关文章:

C++之Eigen库基本使用
目录 1、矩阵的构造和初始化操作 2、矩阵的算术运算 3、矩阵的分解和求解 4、矩阵的变换 5、矩阵的访问和修改 6、矩阵遍历 7、线性方程组求解 8、其他操作 Eigen库是一个高级的C库,用于线性代数,矩阵和向量运算,数值分析和相关的数学…...

2024年 Java 面试八股文——SpringBoot篇
目录 1. 什么是 Spring Boot? 2. 为什么要用SpringBoot 3. SpringBoot与SpringCloud 区别 4. Spring Boot 有哪些优点? 5. Spring Boot 的核心注解是哪个?它主要由哪几个注解组成的? 6. Spring Boot 支持哪些日志框架&#…...

C/C++的指针、万能指针、常量指针和指针常量
C/C的指针 1、 指针的概念: 指针是一个变量,它存储的是另一个变量的内存地址,而不是变量的值。 指针变量的声明:在C/C等语言中,我们通过使用星号*来声明一个指针变量。例如,int *ptr; 这行代码声明了一个…...

【讲解下如何解决一些常见的 Composer 错误】
🌈个人主页: 程序员不想敲代码啊 🏆CSDN优质创作者,CSDN实力新星,CSDN博客专家 👍点赞⭐评论⭐收藏 🤝希望本文对您有所裨益,如有不足之处,欢迎在评论区提出指正,让我们共…...

qq空间:图片批量下载js脚本工具,javascript批量下载图片
qq空间:图片批量下载js脚本工具,javascript批量下载图片 QQ空间很多老照片想下载,但是腾讯没放开,只能一张张下载太麻烦。用前端js写了一个脚本支持批量下载。另外就是空间内的照片会被压缩,过几年再看,个…...

滑动验证码登陆测试编程示例
一、背景及原理 处理登录时的滑动验证码有两个难点,第一个是找到滑块需要移动的距离,第二个是模拟人手工拖动的轨迹。模拟轨迹在要求不是很严的情况下可以用先加速再减速拖动的方法,即路程的前半段加速度为正值,后半段为负值去模…...

爬取89ip代理、 爬取豆瓣电影
1 爬取89ip代理 2 爬取豆瓣电影 1 爬取89ip代理 import requests from fake_useragent import UserAgent from bs4 import BeautifulSoup from requests.exceptions import ProxyErrorclass SpiderIP:def __init__(self):# 定义目标地址哦self.tag_url "https://www.89i…...

XBoot:基于Spring Boot 2.x的一站式前后端分离快速开发平台
XBoot:基于Spring Boot 2.x的一站式前后端分离快速开发平台 摘要 随着信息技术的迅速发展,快速构建高质量、高可靠性的企业级应用成为了迫切需求。XBoot,作为一个基于Spring Boot 2.x的一站式前后端分离快速开发平台,通过整合微信…...

24年最新抖音、视频号0成本挂机,单号每天收益上百,可无限挂
详情介绍 这次给大家带来5月份最新的短视频挂机项目,简单易上手,而且不需要任何投入,经过测试收益非常可观,软件完全免费,特别适合没有时间但是想做副业的家人们...

Day31:单元测试、项目监控、项目部署、项目总结、常见面试题
单元测试 保证独立性。 Assert:断言,一般用来比较是否相等,比如 Assert.assertEquals 在JUnit测试框架中,BeforeClass,Before,After和AfterClass是四个常用的注解,它们的作用如下: …...

Flutter笔记:使用Flutter私有类涉及的授权协议问题
Flutter笔记 使用Flutter私有类涉及的授权协议问题 - 文章信息 - Author: 李俊才 (jcLee95) Visit me at CSDN: https://jclee95.blog.csdn.netMy WebSite:http://thispage.tech/Email: 291148484163.com. Shenzhen ChinaAddress of this article:https://blog.cs…...

面试过程种遇到的面试题收集
文章目录 讲一讲这个项目是干什么的?需求规格说明书有哪些章节?职工部门层级如何显示在一张SQL表上?需求开发用到了哪些技术?HashMap 底层数据结构说一下?介绍一下红黑树?HashMap是线程不安全的,…...

Vue学习:21.mixins混入
在Vue中,mixins(混入)是一种用于分发Vue组件中可复用功能的灵活机制。它们允许你抽取组件中的共享功能,如数据、计算属性、方法、生命周期钩子等,并将其作为单独的模块复用到多个组件中。这种方式有助于保持代码的DRY&…...
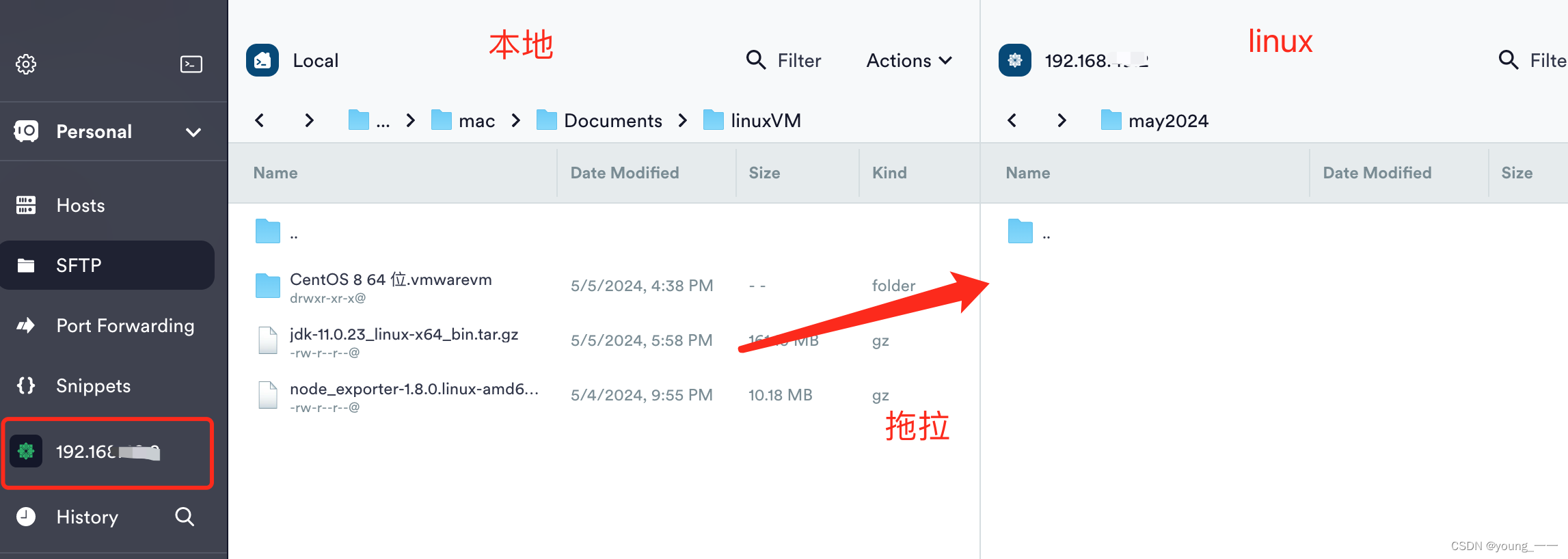
上传文件到 linux
一、mac 法一:scp 先进入mac的 Node_exporter文件(要上传的文件)目录下 输入scp -P 端口号 文件名 rootIP:/存放路径 scp -P 22 node_exporter-1.8.0.linux-amd64.tar.gz root192.***.2:/root 法二、 rz mac 安装 lrzsz,然后…...
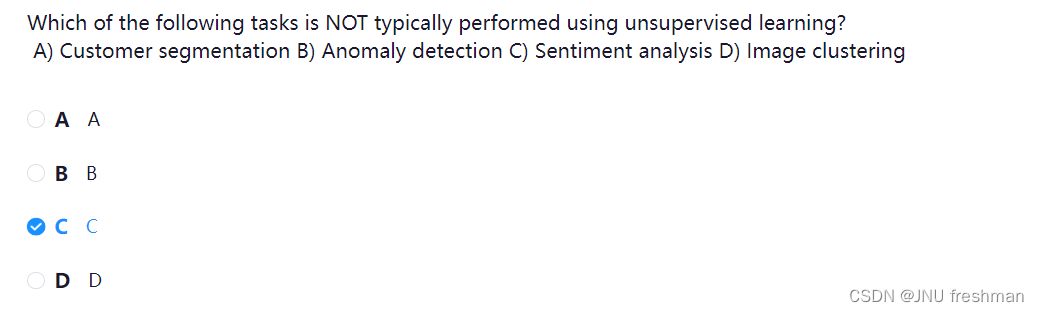
NEO 学习之session7
文章目录 选项 A:它涉及学习标记数据。 选项 B:它需要预定义的输出标签进行训练。 选项 C:它涉及在未标记的数据中寻找模式和关系。 选项 D:它专注于根据输入-输出对进行预测。 答案:选项 C 描述了无监督学习的本质&am…...

毕业设计uniapp+vue有机农产品商城系统 销售统计图 微信小程序
本人在网上找了一下这方面的数据发现农村中的信心普及率很是低农民们都不是怎么会用手机顶多就是打打电话发发短信,平时不太会上网更不会想到通过网络手段去卖出自己的劳作成果—农产品,这无疑大大浪费了农民的劳动成果和国家资源也大大打击了人们的生产…...
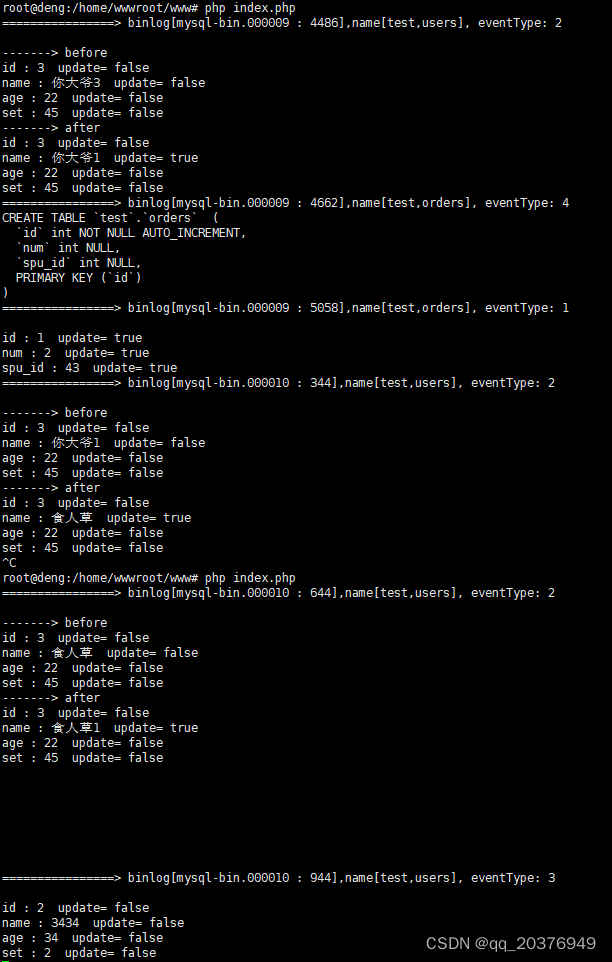
php使用Canal监听msyql
canal需要java8 去官网下载java8 安装JAVA #创建目录 mkdir -p /usr/local/java/ #解压到目录 tar zxvf jdk-8u411-linux-x64.tar.gz -C /usr/local/java/配置环境变量在 /etc/profile 最后加入 export JAVA_HOME/usr/local/java/jdk1.8.0_411 export CLASSPATH.:$JAVA_HOM…...
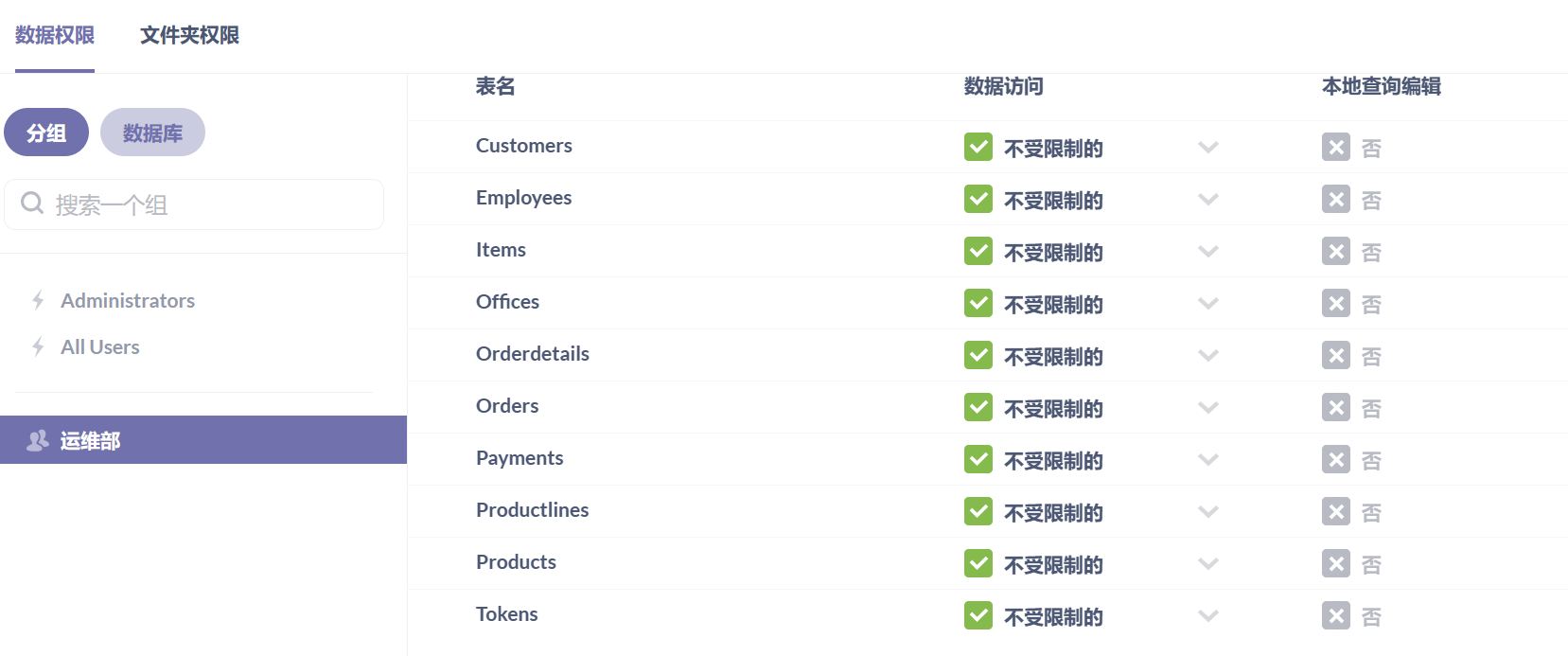
metabase部署与实践
1. 项目目标 (1)了解metabase特点 (2)熟练部署metabase工具 (3)掌握metabase基本使用 2. 项目准备 2.1. 规划节点 主机名 主机IP 节点规划 metabase 10.0.1.141 metabase 2.2. 基础准备 系统镜…...

nacos v2.2.3 docker简单安装使用
nacos v2.2.3 docker简单安装使用 Nacos 官方文档: https://nacos.io/zh-cn/docs/v2/quickstart/quick-start.html 控制台: http://127.0.0.1:8848/nacos/ 初始用户名、密码: 账号:nacos 密码:nacos 启动docker…...

java设计模式-生成器模式
文章目录 生成器模式(Builder)1、目的和适用场景2、角色和职责3、实现步骤4、示例15、示例26、优点7、示例场景 生成器模式(Builder) 生成器模式(Builder Pattern)是一种创建型设计模式,它用于…...

别急着写Verilog!用Logisim手搓一个运动码表,可能是你理解数字系统最好的方式
从门电路到运动码表:用Logisim重塑数字电路认知 在当今硬件设计领域,HDL(硬件描述语言)已成为主流工具,Verilog和VHDL让复杂系统的设计变得高效。但这也带来一个隐忧——许多工程师能熟练编写状态机,却说不…...

英雄联盟玩家如何通过本地化智能工具提升游戏胜率:League Akari 完整使用指南
英雄联盟玩家如何通过本地化智能工具提升游戏胜率:League Akari 完整使用指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit Leag…...

开放式耳机什么牌子好用又实惠?2026开放式耳机性价比推荐前十
如今开放式耳机早已不是“小众单品”,不入耳、不闷汗、能兼顾环境音的优势,让它成为通勤、运动、办公人群的首选。但大家选购时最纠结的问题始终是:开放式耳机什么牌子好用又实惠?市面上产品从百元到千元参差不齐,有的…...

从‘能用’到‘好用’:我的单透镜优化踩坑记录与Ansys Zemax实战心得
从‘能用’到‘好用’:我的单透镜优化踩坑记录与Ansys Zemax实战心得 作为一名光学工程师,我曾在单透镜设计的优化环节屡屡碰壁。那些看似简单的参数调整背后,往往隐藏着令人头疼的陷阱——评价函数数值下降但实际像质变差、约束条件莫名失效…...

魔兽争霸3帧率解锁与界面修复终极指南:3步解决所有显示异常
魔兽争霸3帧率解锁与界面修复终极指南:3步解决所有显示异常 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3的卡顿画面和界…...

基于OpenClaw框架的AI虚拟宠物技能:ClawPet设计与实现
1. 项目概述:在聊天机器人里养一只AI驱动的电子宠物 如果你和我一样,对90年代的电子宠物拓麻歌子(Tamagotchi)还有着深刻的童年记忆,同时又对现在各种AI聊天机器人(Chatbot)的智能交互能力着迷…...

AUTOSAR ECU资源模板:硬件描述与工程实践
1. AUTOSAR ECU资源模板的核心价值解析在汽车电子系统开发领域,AUTOSAR(汽车开放系统架构)已经成为行业公认的标准框架。作为这个框架中的关键组成部分,ECU资源模板在实现软硬件解耦方面发挥着不可替代的作用。这个模板本质上是一…...

终极指南:如何通过5个步骤实现Zotero PDF翻译的学术效率革命
终极指南:如何通过5个步骤实现Zotero PDF翻译的学术效率革命 【免费下载链接】zotero-pdf-translate Translate PDF, EPub, webpage, metadata, annotations, notes to the target language. Support 20 translate services. 项目地址: https://gitcode.com/gh_mi…...
)
8088单板机DIY--串口转换(一)
1.USB转232电路2.功能测试打开设备管理器,可以看到新增的串口。3.通讯测试短接发送和接收,进行自发自收测试。...
)
2026年电工杯比赛思路、Python代码、Matlab代码、论文(持续更新中......)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...