STM32单片机实战开发笔记-I2C通讯总线【wulianjishu666】
嵌入式单片机开发实战例程合集:
链接:https://pan.baidu.com/s/11av8rV45dtHO0EHf8e_Q0Q?pwd=28ab
提取码:28ab
I2C模块测试
- 功能描述
I2C总线接口连接微控制器和串行I2C总线。它提供多主机功能,控制所有I2C总线特定的时序,协议,仲裁和定时。支持标准和快速两种模式,同时与SMBus 2.0兼容.
- 主要特性
- 并行总线/I2C总线协议转换器
- 多主机功能:同一接口即可做主设备也可做从设备
- I2C主设备功能
- 产生时钟
- 产生起始和停止信号
- I2C从设备功能
- 可编程的I2C地址检测
- 可响应2个从地址的双地址能力
- 停止位检测
- 产生和检测7位/10位地址和广播呼叫
- 支持不同的通讯速度
- 标准速度(高至100KHZ)
- 快速(高至400KHZ)
- 状态标志
- 发送器/接收器模式标志
- 字节发送结束标志
- I2C总线忙标志
- 错误标志
- 主模式时的时钟丢失
- 地址/数据传输后的应答(ACK)错误
- 检测到起始和停止错位
- 禁止拉长时钟功能后的上溢或下溢
- 2个中断向量
- 1个中断用于地址/数据通讯成功
- 1个中断用于出错
- 可选的拉长时钟功能
- 具单字节缓冲器的DMA
- 通信过程
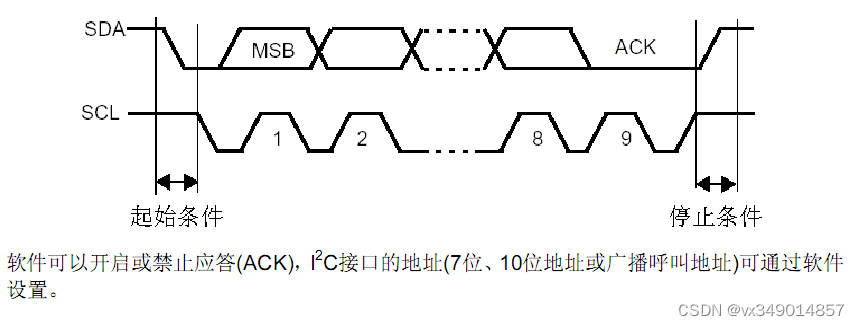
主模式时,I2C接口启动数据传输并产生时钟信号。串行数据传输总是以起始条件开始和停止条件结束。主模式时,由软件控制产生起始条件和停止条件。
从模式时,I2C接口能识别它自己的地址(7位或10位)和广播呼叫地址。软件控制开启或禁止广播呼叫地址的识别。
数据和地址按8位/字节进行传输,高位在前。跟在起始条件后面的第一,二个字节是地址(7位模式为1个字节,10位模式为2个字节)。地址只在主模式发送。
在一个字节传输的8个时钟后的第9个时钟期间,接收器必须回送一个应答位(ACK)给发生器。

- EEPROM
CAT24WC16是CATALYST公司生产的串行电可擦除的可编程存储器。其内部共有128页,每一页为16字节,每一字节为8位。CAT24WC16以一个字节为一个存储单元,共有2K个存储单元。因此任一存储单元的地址为11位(A0~A11),地址范围为0x00~0x7FF(2K地址范围)。
CAT24WC16的特性如下:
- 1.8~6.0V工作电压范围。
- 存储容量为16KB.
- 16字节页写缓冲器。
- 与400KHZ的I2C总线兼容。
- 符合双向数据传输协议。
- 数据保存时间长达100年,具有硬件写保护和软件数据保护功能
- 自动定时擦写周期
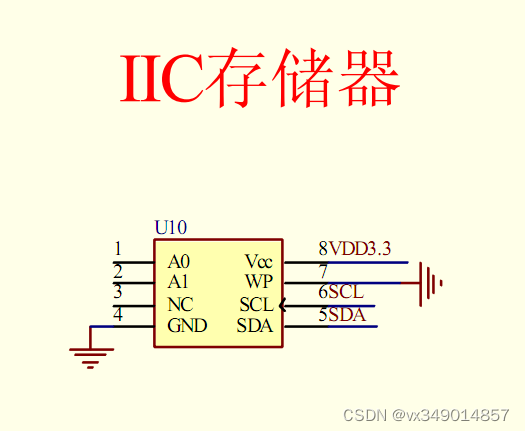
引脚说明:
| 引脚名称 | 功能 | 功能描述 |
| VCC GND | 电源,地 | 为芯片提供3.3V电源 |
| A0 A1 A2 | 地址选择 | 在串行总线结构中,最多可以连接8个CAT24WC16芯片,则用A0,A1,A2设置地址以示区别 A0 A1 A2 悬空为0 |
| WP | 写保护 | 此引脚接地允许写操作,接VCC被禁止 |
| SCL | 时钟线 | 串行时钟输入 |
| SDA | 数据线 | 双向串行数据输入/输出 |
5、硬件电路
- 软件代码
/********************************************************************
* 说明 :通过I2C总线实现对EEPROM的读写操作
/*******************************************************************
本实验使用CAT24WC16:
CAT24WC16是CATALSYT公司生产的串行电可擦除的可编程存储器。其内部共有128页,每一页
为16字节,每一个字节8位。CAT24WC16以一个字节为一个存储单元,共有2K个存储单元。因此任一
存储单位地址为11位(A0~A11),地址范围为0x00~0x7FF(2K地址范围)。
*******************************************************************/
#include"stm32f10x_lib.h"
#include"IIC.h"
#define EEPROM_ADDRESS 0xA0
#define I2C2_SLAVE_ADDRESS7 0xA0
#define I2C_Speed 200000
#define I2C_PageSize 16
void I2C_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
I2C_InitTypeDef I2C_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(GPIOB,&GPIO_InitStructure);
/* I2C Configuration */
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //设置I2C为I2C模式
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; //I2C快速模式
I2C_InitStructure.I2C_OwnAddress1 = I2C2_SLAVE_ADDRESS7;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; //使能应答
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = I2C_Speed;
/* I2C Peripheral Enable*/
I2C_Cmd(I2C2,ENABLE);
I2C_Init(I2C2,&I2C_InitStructure);
}
void I2C2_Init(void)
{
I2C_Configuration();
}
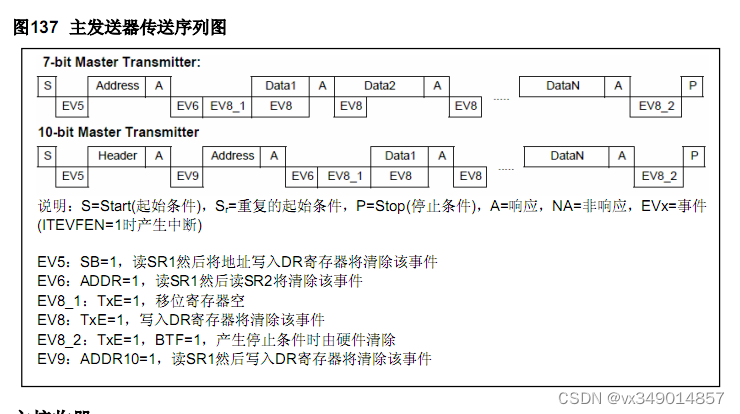
void I2C_ByteWrite(u8 *pBuffer,u8 WriteAddr)
{
I2C_WaitEepromStandbyState();
/* [1]Send Start Condition 发送起始信号*/
I2C_GenerateSTART(I2C2,ENABLE);
/* [2]Test On EV5 and clear it 起始信号已发送并清除该事件 */
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_MODE_SELECT));
/* [3]Send EEPROM address for write 发送器件地址*/
I2C_Send7bitAddress(I2C2,EEPROM_ADDRESS,I2C_Direction_Transmitter);
/* [4]Test on Ev6 and clear it 地址发送结束 */
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/* [5]Send EEPROM's internal address to write 发送器件内部写入地址 */
I2C_SendData(I2C2,WriteAddr);
/* [6]Test on EV8 _1 and clear it 移位寄存器空 */
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
/* [7]Send the byte to be writeen 发送数据*/
I2C_SendData(I2C2,*pBuffer);
/* [8]Test on EV8 and clear it 发送缓冲区空*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
/* [9]Send STOP condition 发送停止信号 */
I2C_GenerateSTOP(I2C2,ENABLE);
}
void I2C_PageWrite(u8 *pBuffer,u8 WriteAddr,u8 NumByteToWrite)
{
I2C_WaitEepromStandbyState();
/*[1]Send START condition 发送起始条件*/
I2C_GenerateSTART(I2C2,ENABLE);
/*[2]Test on EV5 and clear it 起始信号发送是否成功*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_MODE_SELECT));
/*[3]Send EEPROM address for write 发送器件地址*/
I2C_Send7bitAddress(I2C2,EEPROM_ADDRESS,I2C_Direction_Transmitter);
/*[4]Test on EV6 and clear it 发送器件地址是否成功*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/*[5]Send EEPROM'S internal address to write to 发送数据的写入首地址*/
I2C_SendData(I2C2,WriteAddr);
/*[6]Test on EV8 and clear it 发送内部地址是否成功*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
/*[7]Send data to Written 发送数据*/
while(NumByteToWrite--)
{
/*Send the current byte 发送当前一个字节*/
I2C_SendData(I2C2,*pBuffer);
/* Point to the next byte to be written 地址++*/
pBuffer++;
/*Test on EV8 and clear it 发送缓冲区是否为空*/ while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
}
/*[8]Send STOP condition 发送停止信号*/
I2C_GenerateSTOP(I2C2,ENABLE);
}
void I2C_BufferWrite(u8 *pBuffer,u8 WriteAddr,u16 NumByteToWrite)
{
u8 NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0;
Addr = WriteAddr % I2C_PageSize;
count = I2C_PageSize - Addr;
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
I2C_WaitEepromStandbyState();
/* If WriteAddr is I2C_PageSize aligned */
if(Addr == 0)
{
/* If NumByteToWrite < I2C_PageSize */
if(NumOfPage == 0)
{
I2C_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
/* If NumByteToWrite > I2C_PageSize */
else
{
while(NumOfPage--)
{
I2C_PageWrite(pBuffer, WriteAddr, I2C_PageSize);
I2C_WaitEepromStandbyState();
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
if(NumOfSingle!=0)
{
I2C_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
}
}
/* If WriteAddr is not I2C_PageSize aligned */
else
{
/* If NumByteToWrite < I2C_PageSize */
if(NumOfPage== 0)
{
I2C_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
/* If NumByteToWrite > I2C_PageSize */
else
{
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
if(count != 0)
{
I2C_PageWrite(pBuffer, WriteAddr, count);
I2C_WaitEepromStandbyState();
WriteAddr += count;
pBuffer += count;
}
while(NumOfPage--)
{
I2C_PageWrite(pBuffer, WriteAddr, I2C_PageSize);
I2C_WaitEepromStandbyState();
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
if(NumOfSingle != 0)
{
I2C_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
}
}
}
void I2C_WaitEepromStandbyState(void)
{
vu16 SR1_Tmp = 0;
do
{
/* Send START condition */
I2C_GenerateSTART(I2C2, ENABLE);
/* Read I2C1 SR1 register */
SR1_Tmp = I2C_ReadRegister(I2C2, I2C_Register_SR1);
/* Send EEPROM address for write */
I2C_Send7bitAddress(I2C2, EEPROM_ADDRESS, I2C_Direction_Transmitter);
}while(!(I2C_ReadRegister(I2C2, I2C_Register_SR1) & 0x0002));
/* Clear AF flag */
I2C_ClearFlag(I2C2, I2C_FLAG_AF);
}
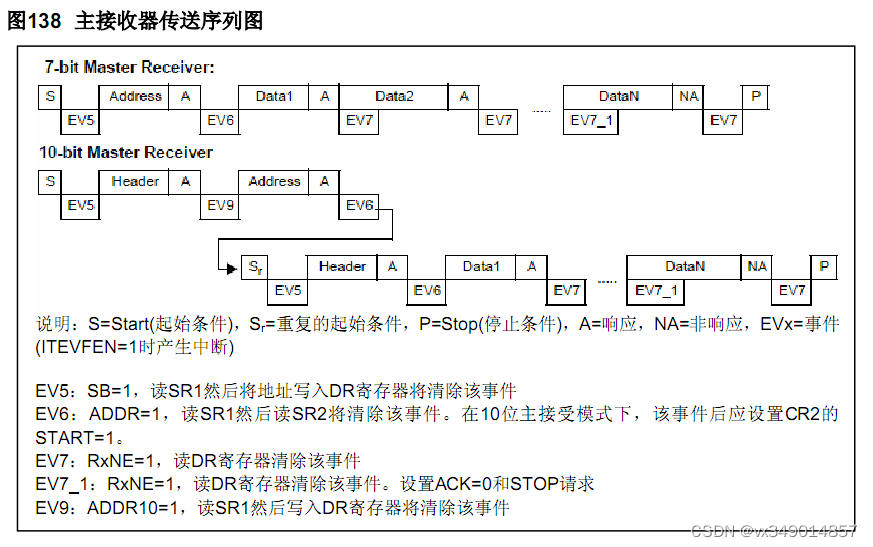
void I2C_BufferRead(u8 *pBuffer,u8 ReadAddr,u16 NumByteToRead)
{
I2C_WaitEepromStandbyState();
/*Send START Condition 发送起始信号*/
I2C_GenerateSTART(I2C2,ENABLE);
/*Test on EV5 and clear it 检测起始信号是否发送成功*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_MODE_SELECT));
/* In the case of a singel data transfer disable ACK before readint the data*/
if(NumByteToRead==1)
{
I2C_AcknowledgeConfig(I2C2,DISABLE);//如果NumByteToRead则不需1字节一应答
}
/*Send EEPROM ADDRESS for write */
I2C_Send7bitAddress(I2C2,EEPROM_ADDRESS,I2C_Direction_Transmitter);
/* Test on EV6 and clear it*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/* Enable I2C*/
I2C_Cmd(I2C2,ENABLE);
/* Send EEPROM'S internal address to write to*/
I2C_SendData(I2C2,ReadAddr);
/*Test on EV8 and clear it*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
/*Send START condition again*/
I2C_GenerateSTART(I2C2,ENABLE);
/*Test on EV5 and clear it*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_MODE_SELECT));
/*Send EEPROM address for read*/
I2C_Send7bitAddress(I2C2,EEPROM_ADDRESS,I2C_Direction_Receiver);
/*Test on EV6 and clear it*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED));
/*Read Data*/
while(NumByteToRead)
{
/*Test on EV7 and clear it*/
if(I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_RECEIVED))
{
if(NumByteToRead == 2)
{
/*Disable Acknowledgement*/
I2C_AcknowledgeConfig(I2C2,DISABLE); //一般在最后一个字节关闭应答
}
if(NumByteToRead == 1)
{
/*Send STOP condition */ //最后一位要关闭应答,发送停止信号
I2C_GenerateSTOP(I2C2,ENABLE);
}
/*Read a byte from the EEPROM*/
*pBuffer = I2C_ReceiveData(I2C2);
/*Point to the next location where the byte read will be saved*/
pBuffer++;
/*Decrement the read bytes counter*/
NumByteToRead--;
}
}
/*Enable Acknowledgement to be ready for anotherreception*/
I2C_AcknowledgeConfig(I2C2,ENABLE); //允许再次应答
}
相关文章:
STM32单片机实战开发笔记-I2C通讯总线【wulianjishu666】
嵌入式单片机开发实战例程合集: 链接:https://pan.baidu.com/s/11av8rV45dtHO0EHf8e_Q0Q?pwd28ab 提取码:28ab I2C模块测试 功能描述 I2C总线接口连接微控制器和串行I2C总线。它提供多主机功能,控制所有I2C总线特定的时序&am…...

区块链 | NFT 水印:Review on Watermarking Techniques(一)
🍍原文:Review on Watermarking Techniques Aiming Authentication of Digital Image Artistic Works Minted as NFTs into Blockchains 1 应用于 NFT 的水印技术 常见的水印技术类型可以分为: 可见 v i s i b l e \mathsf{visible} visi…...
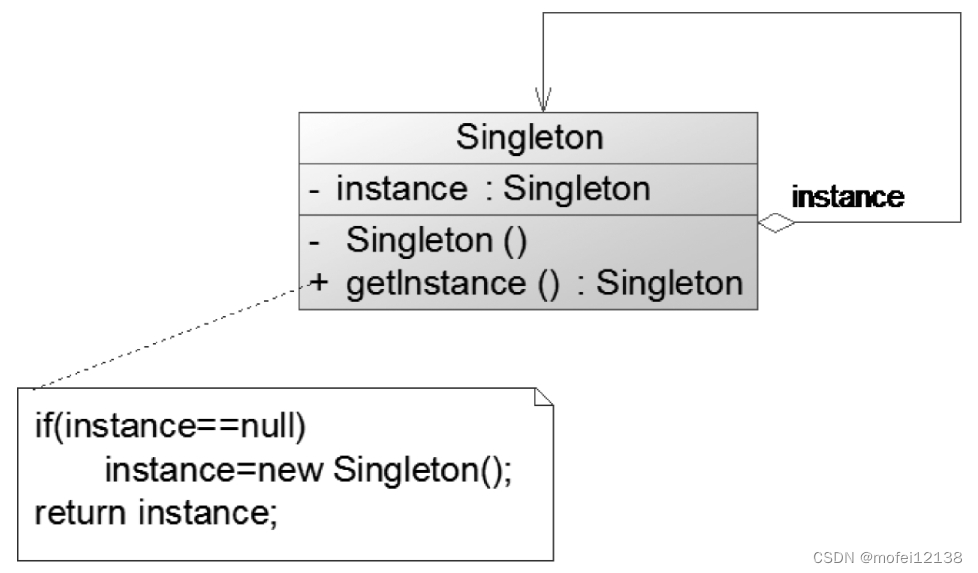
Python设计模式 - 单例模式
定义 单例模式是一种创建型设计模式, 其主要目的是确保一个类只有一个实例, 并提供一个全局访问点来访问该实例。 结构 应用场景 资源管理:当需要共享某个资源时,例如数据库连接、线程池、日志对象等,可以使用单例模…...

AI日报:干翻AI PC!苹果M4芯片首发;GoEnhance可生成粘土风格视频;DeepSeek-V2模型已在魔搭社区开源
欢迎来到【AI日报】栏目!这里是你每天探索人工智能世界的指南,每天我们为你呈现AI领域的热点内容,聚焦开发者,助你洞悉技术趋势、了解创新AI产品应用。 新鲜AI产品点击了解:AIbase - 智能匹配最适合您的AI产品和网站 1、干翻AI …...

cmake进阶:目标属性
一. 简介 前面学习了 cmake 的一些目录属性,本文来学习 cmake的一些 目标属性。 目标属性,顾名思义就是目标对应的属性。 二. cmake进阶:目标属性 目标属性,顾名思义就是目标对应的属性。 cmake的所有目标属性可以通过如下网址…...
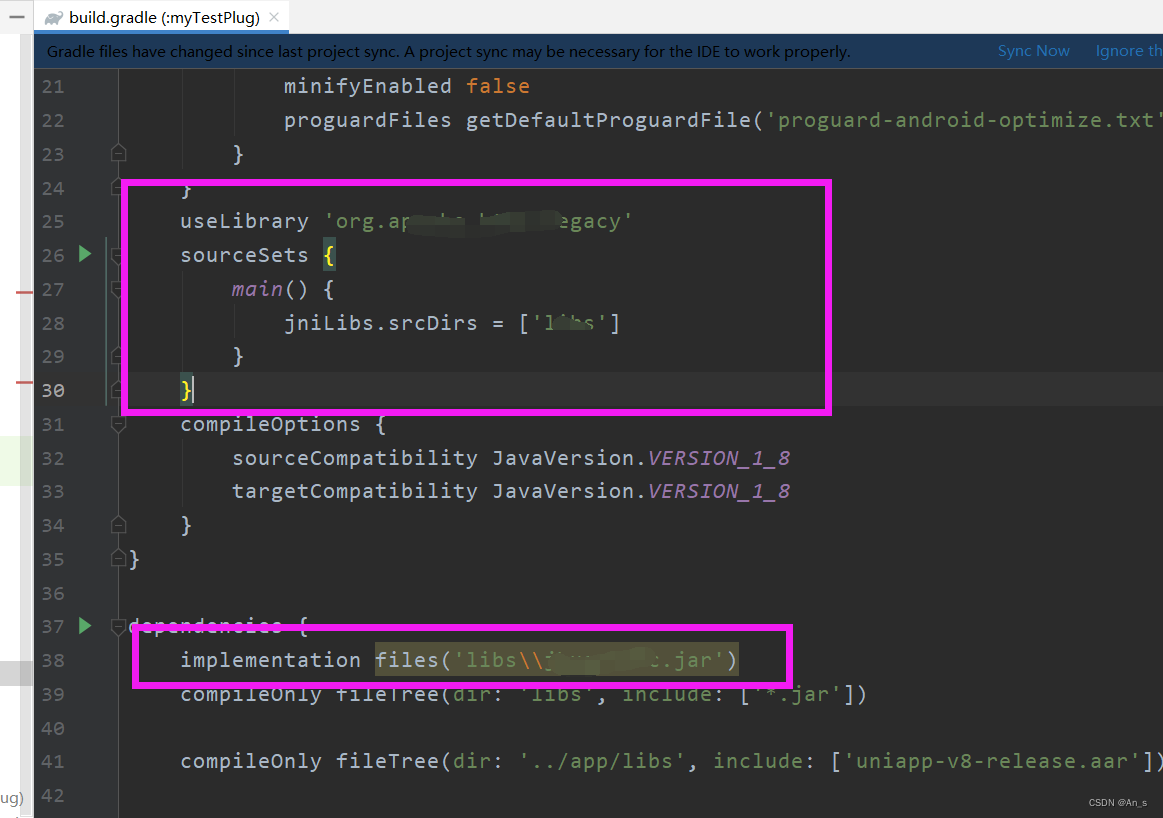
uniapp0基础编写安卓原生插件和调用第三方jar包和编写语音播报插件之使用jar包插件
前言 如果你不会编写安卓插件,你可以先看看我之前零基础的文章(uniapp0基础编写安卓原生插件和调用第三方jar包和编写语音播报插件之零基础编写安卓插件), 我们使用第三方包,jar包编写安卓插件 开始 把依赖包,放到某个模块的/libs目录(myTestPlug/libs) 还要到build…...
恢复数据,电脑数据恢复详细操作指南(4个方法)
“我经常会把很多重要的文件都保存在电脑上,但今天在清理电脑时好像误删了一些数据,有没有比较好用的数据恢复方法可以分享一下呢?请大家给我推荐几个吧!” 随着电脑的普及,我们越来越多地将重要数据存储在电脑中。然而…...

make SGX_MODE=SW
make SGX_MODESW...
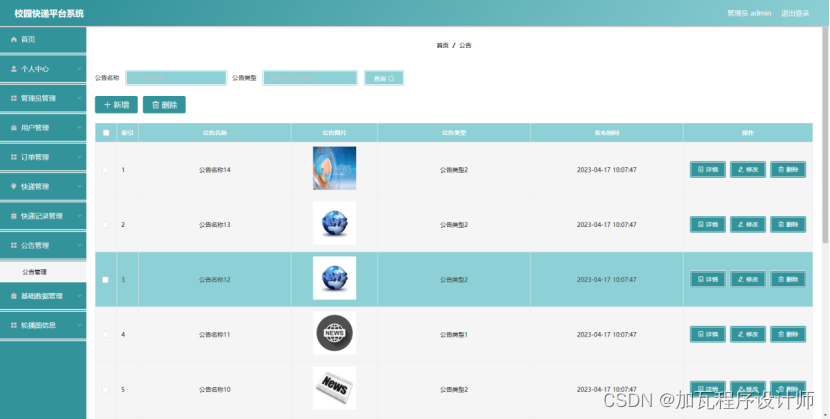
【毕业设计】基于微信小程序的校园快递平台系统设计与实现
1.项目介绍 如今社会上各行各业,都喜欢用自己行业的专属软件工作,互联网发展到这个时候,人们已经发现离不开了互联网。新技术的产生,往往能解决一些老技术的弊端问题。因为传统校园快递平台系统信息管理难度大,容错率…...
SWAT模型【建模方法、实例应用、高级进阶技能】实践
第一部分:SWAT模型实践部分 一、SWAT模型及应用介绍 1.1 面源污染概要 1.2 SWAT模型及应用 1.3 SWAT模型原理 1.4 SWAT模型输入文件 1.5 ArcGIS与SWAT关系 二、SWAT模型中GIS必备技术 2.1 GIS软件平台 2.2 ArcGIS10.6安装和注意事项 2.3 ArcGIS入门 2.…...

远动通讯屏功能和作用
远动通讯屏功能和作用 首先大家要先了解,什么叫远动通讯?远动通讯是电力系统指用于远程通信和远程控制的设备。它主要采集电发场站的电气运行参数与远程调度监控中心进行数据交互,并接收调度中心远程的指令控制。提高电力系统的运行效率和可靠…...
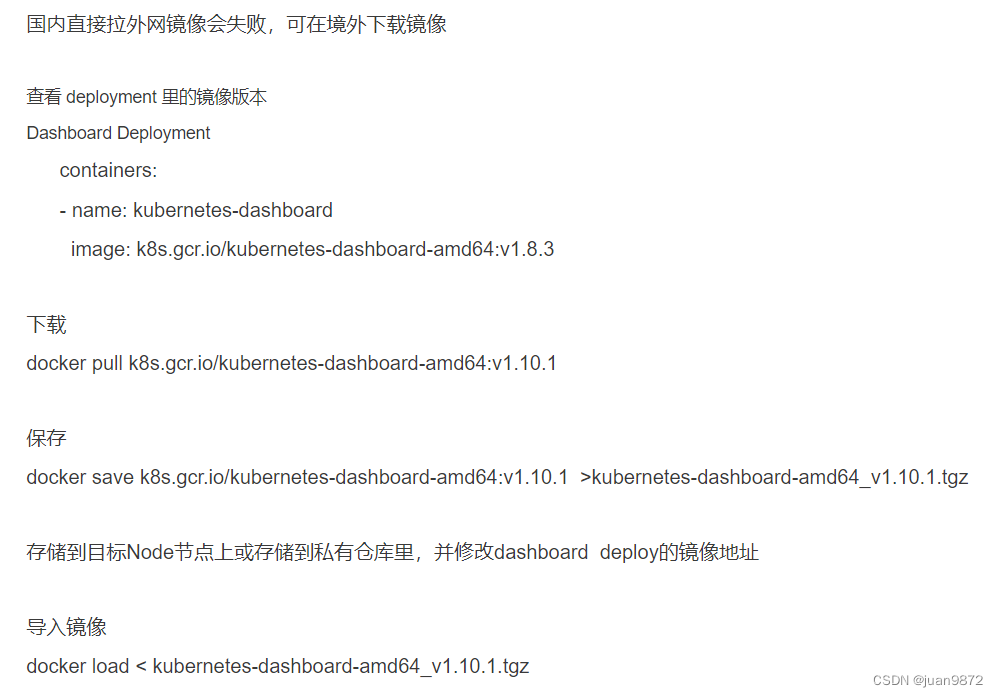
Dashboard 安装部署
Dashboard 安装部署 Dashboard 安装部署 一:下载 二:部署步骤 1.镜像下载及导入 国内直接拉外网镜像会失败,可在境外下载镜像 查看 deployment 里的镜像版本 Dashboard Deploymentcontainers:- name: kubernetes-dashboardimage: k8s.g…...
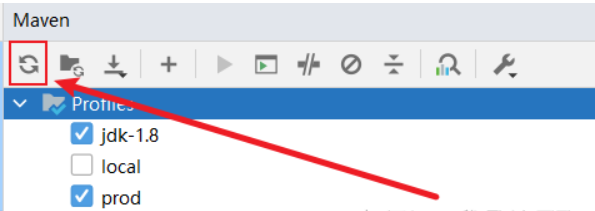
idea Maven 插件 项目多环境打包配置
背景 不同环境的配置文件不一样,打包方式也有差异 1. 准备配置文件 这里 local 为本地开发环境 可改为 dev 名称自定义 test 为测试环境 prod 为生产环境 根据项目业务自行定义 application.yml 配置: spring:profiles:#对应pom中的配置active: spring.…...
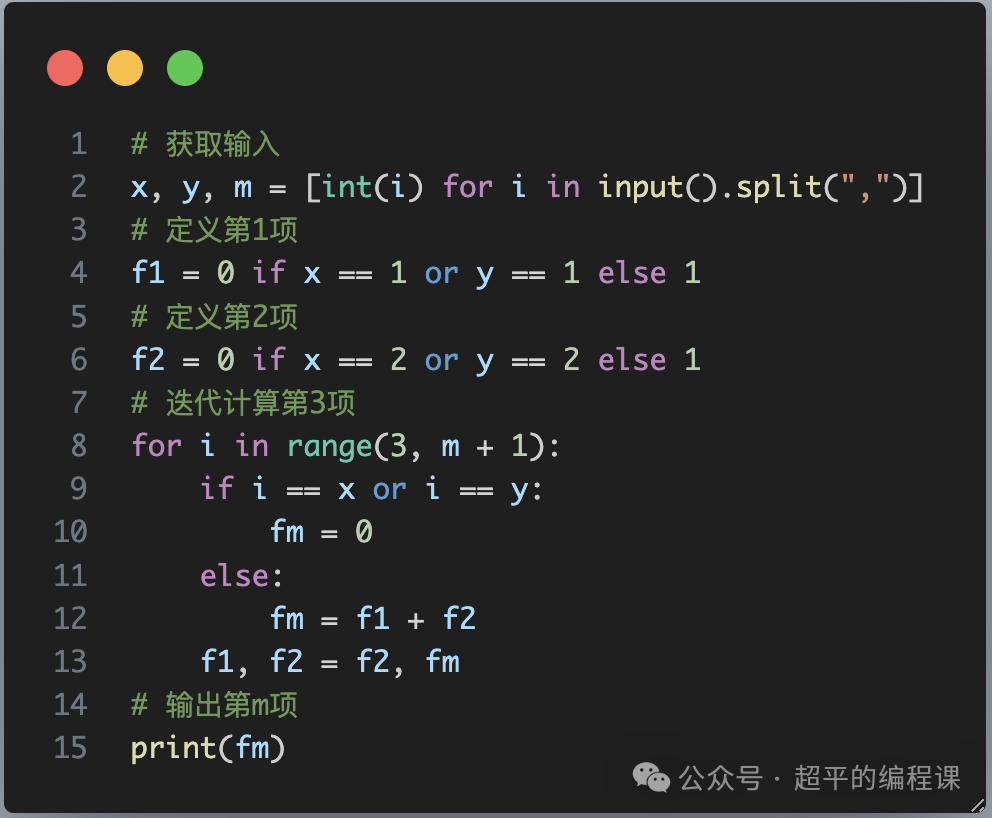
密室逃脱游戏-第12届蓝桥杯省赛Python真题精选
[导读]:超平老师的Scratch蓝桥杯真题解读系列在推出之后,受到了广大老师和家长的好评,非常感谢各位的认可和厚爱。作为回馈,超平老师计划推出《Python蓝桥杯真题解析100讲》,这是解读系列的第58讲。 密室逃脱游戏&…...

ES6-自学01
调用方法读取文件:如果失败就throw抛出err,成功则抛出data 2.使用promise封装,如果失败就改变状态为 reject(err) 如果成功就 resolve(返回成功的值) ,然后then,就可以获取返回的值,值toString()方法来把…...

PyQt5批量生成Checkbox及批量检查Checkbox的勾选状态
批量生成Checkbox并添加到TableWidget中 for i in range(10):checkbox_i QCheckBox(fCheckbox_{i}) # 生成Checkbox并命名为Checkbox_iself.ui_1.tableWidget_1.setCellWidget(i,1,checkbox_i) 批量检查勾选状态 # 批量生成Checkbox并存入列表 list_Checkbox_1 [] for …...
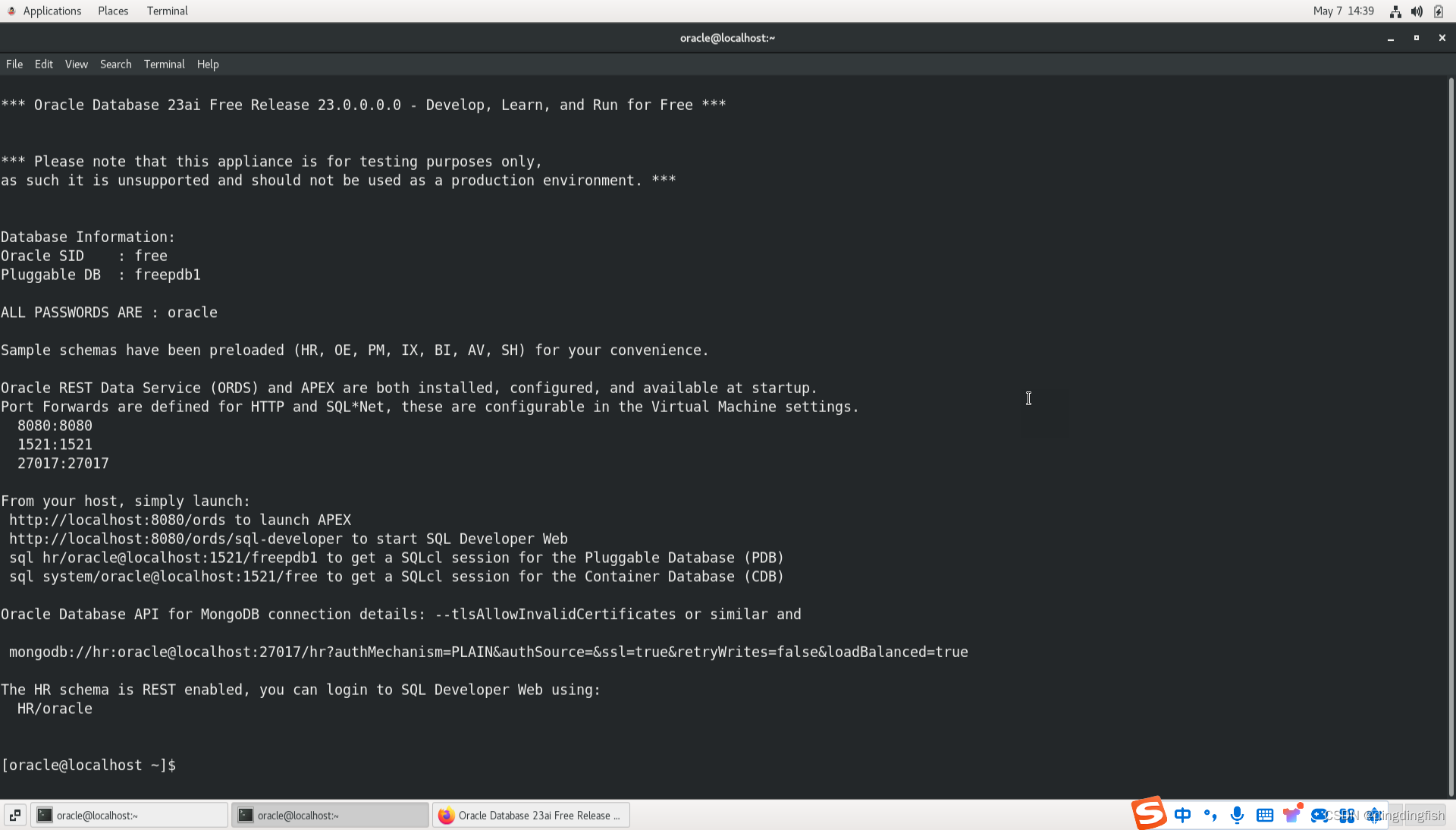
如何获得一个Oracle 23ai数据库(Virtual Appliance)
准确的说,是Oracle 23ai Free Developer版,因为企业版目前只在云上(OCI和Azure)和ECC上提供。 方法包括3种,本文介绍第1种: Virtual ApplianceRPM安装Docker 从此处下载虚拟机。 可以看到虚拟机需要4G内…...
跟TED演讲学英文:What moral decisions should driverless cars make by Iyad Rahwan
What moral decisions should driverless cars make? Link: https://www.ted.com/talks/iyad_rahwan_what_moral_decisions_should_driverless_cars_make Speaker: Iyad Rahwan Date: September 2016 文章目录 What moral decisions should driverless cars make?Introduct…...
-规格化交互信息Metric)
【ITK配准】第七期 尺度(Metric)-规格化交互信息Metric
很高兴在雪易的CSDN遇见你 VTK技术爱好者 QQ:870202403 公众号:VTK忠粉 前言 本文分享ITK中的互信息Metric,即itk::ITK中的互信息Metric,即itk::MutualInformationImageToImageMetric ,希望对各位小伙伴有所帮助! 感谢各位小伙伴的点赞+关注,小易会继续努力分享…...

Python练习 20240508一次小测验
Python基础 10道基础练习题 1. 个人所得税计算器描述输入输出示例…...
)
别再傻傻分不清!4脚和2脚的电感,在开关电源里到底怎么用?(附实物接线图)
4脚与2脚电感实战指南:开关电源中的精准识别与焊接技巧 在维修老式电脑电源时,我曾亲眼目睹一位工程师将四脚电感误焊到差模滤波位置,导致整机EMI测试超标30dB。这个价值两万元的教训让我意识到——引脚数量不仅是外观差异,更是电…...

告别论文 “双杀” 困局:okbiye 如何用一套闭环方案,破解重复率与 AIGC 检测双重难题
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT降重复率 - Okbiye智能写作https://www.okbiye.com/reduceAIGC 当你对着导师的红笔批注,第三次修改论文时,有没有想过一个问题:为什么你改了又改的句子,重…...

群晖Docker部署iptv-m3u-maker保姆级教程:自动检测直播源,告别失效频道
群晖NAS上打造智能IPTV系统:Docker容器化部署与自动化直播源管理实战 在家庭媒体中心搭建领域,群晖NAS凭借其出色的硬件性能和灵活的软件生态,已成为众多技术爱好者的首选平台。而将IPTV服务整合进NAS系统,不仅能实现传统电视节目…...

DiffuGen:基于扩散模型的代码生成技术原理与应用前景
1. 项目概述:当AI绘画遇上代码生成最近在GitHub上看到一个挺有意思的项目,叫CLOUDWERX-DEV/DiffuGen。光看名字,Diffu很容易让人联想到这两年火得不行的扩散模型(Diffusion Model),而Gen则指向生成…...

终极SQLite数据库管理指南:DB Browser for SQLite完整使用手册
终极SQLite数据库管理指南:DB Browser for SQLite完整使用手册 【免费下载链接】sqlitebrowser Official home of the DB Browser for SQLite (DB4S) project. Previously known as "SQLite Database Browser" and "Database Browser for SQLite&quo…...

ESP32 Arduino核心开发终极指南:构建专业级物联网控制系统
ESP32 Arduino核心开发终极指南:构建专业级物联网控制系统 【免费下载链接】arduino-esp32 Arduino core for the ESP32 family of SoCs 项目地址: https://gitcode.com/GitHub_Trending/ar/arduino-esp32 还在为物联网项目开发中的硬件兼容性、开发环境复杂…...

Win11家庭版隐藏功能解锁:除了gpedit.msc,这些高级设置你也能用了
Win11家庭版隐藏功能深度解锁:从组策略到系统优化的高阶玩法 当你第一次在Win11家庭版中成功唤出组策略编辑器(gpedit.msc)时,面对密密麻麻的策略项是否感到无从下手?这就像拿到了一把万能钥匙,却不知道哪些…...

理解“变异”的奥秘——集中趋势与变异性度量详解
如果说统计学是在“用数据讲故事”,那么集中趋势回答的是:“这个故事大概讲到了哪里?”而变异性回答的是:“这个故事有多分散、多不稳定、多不一样?”很多初学者学统计时,最先记住的是“平均数”“中位数”…...

拆解安防摄像头的“眼睛”:从IMX290 Sensor到镜头,如何一步步调出通透画质?
拆解安防摄像头的“眼睛”:从IMX290 Sensor到镜头,如何一步步调出通透画质? 在安防监控领域,画质表现直接决定了产品的核心竞争力。当我们谈论"通透画质"时,实际上是在讨论一种光学与电子系统的协同优化艺术…...
)
从‘黑盒子’到清晰电路:用替代定理‘破译’未知网络N的VCR(图解+方程双解法)
从‘黑盒子’到清晰电路:用替代定理‘破译’未知网络N的VCR(图解方程双解法) 在电子工程实践中,工程师们常常会遇到一种令人头疼的"黑盒子"——那些内部结构不明、数据手册不全的电路模块。面对这样的未知网络ÿ…...