stm32学习探究:利用TB6612驱动直流电机
在这篇文章中,我们将探讨如何使用STM32微控制器和TB6612FNG直流电机驱动模块来驱动直流电机。TB6612FNG是一款基于MOSFET的H桥集成电路,能够独立双向控制两个直流电机,非常适合用于小型机器人或双轮车等项目。
一、TB6612FNG 驱动模块介绍
TB6612FNG由东芝半导体公司生产,它包含两个H桥驱动器,可以控制两个直流电机的正反转以及速度。该模块具有较高的效率,并且集成了电流检测和保护功能。
二、硬件连接
首先,我们需要了解TB6612FNG的主要引脚功能:
- VM: 电机驱动电压输入端(4.5V~15V)
- VCC: 逻辑电平输入端(2.7V~5.5V)
- GND: 接地
- AIN1/AIN2: A电机输入端,控制电机正反转
- BIN1/BIN2: B电机输入端,控制电机正反转
- PWMA/PWMB: 电机控制信号输入端,用于调速
- STBY: 正常工作/待机状态控制端
接下来,我们将STM32开发板与TB6612FNG连接:
- VM 接12V电源。
- VCC 接STM32的3.3V输出。
- GND 接STM32的地。
- AIN1 和 AIN2 接STM32的两个GPIO引脚。
- PWMA 接STM32的一个定时器通道,用于PWM调速。
- STBY 接高电平,使模块处于工作状态。
三、软件编程
在STM32上编程,我们需要配置GPIO和定时器以生成PWM信号。以下是使用HAL库的一个简单示例:
#include "stm32f1xx_hal.h"// 定义AIN1, AIN2, 和 PWMA 引脚
#define AIN1_GPIO_PIN GPIO_PIN_14
#define AIN1_GPIO_PORT GPIOB
#define AIN2_GPIO_PIN GPIO_PIN_15
#define AIN2_GPIO_PORT GPIOB
#define PWMA_GPIO_PIN GPIO_PIN_9
#define PWMA_GPIO_PORT GPIOA// 初始化GPIO
void GPIO_Init(void) {// AIN1, AIN2 作为输出GPIO_InitTypeDef GPIO_InitStruct = {0};GPIO_InitStruct.Pin = AIN1_GPIO_PIN | AIN2_GPIO_PIN;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(AIN1_GPIO_PORT, &GPIO_InitStruct);// PWMA 作为定时器PWMGPIO_InitStruct.Pin = PWMA_GPIO_PIN;HAL_GPIO_Init(PWMA_GPIO_PORT, &GPIO_InitStruct);
}// 初始化定时器用于PWM
void TIM_PWM_Init(void) {TIM_HandleTypeDef htim1;// 定时器配置代码...htim1.Instance = TIM1;htim1.Init.Prescaler = 0;htim1.Init.CounterMode = TIM_COUNTERMODE_UP;htim1.Init.Period = 999; // PWM频率htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;HAL_TIM_PWM_Init(&htim1);// 启动PWMHAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
}// 设置电机速度
void Motor_SetSpeed(uint8_t direction, uint16_t speed) {if (direction == FORWARD) {// AIN1 = 0, AIN2 = 1 正转HAL_GPIO_WritePin(AIN1_GPIO_PORT, AIN1_GPIO_PIN, GPIO_PIN_RESET);HAL_GPIO_WritePin(AIN2_GPIO_PORT, AIN2_GPIO_PIN, GPIO_PIN_SET);} else {// AIN1 = 1, AIN2 = 0 反转HAL_GPIO_WritePin(AIN1_GPIO_PORT, AIN1_GPIO_PIN, GPIO_PIN_SET);HAL_GPIO_WritePin(AIN2_GPIO_PORT, AIN2_GPIO_PIN, GPIO_PIN_RESET);}// 设置PWM占空比__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, speed);
}int main(void) {HAL_Init();SystemClock_Config();MX_TIM1_Init();GPIO_Init();while (1) {// 正转,速度为中等Motor_SetSpeed(FORWARD, 500);HAL_Delay(3000);// 反转,速度为低Motor_SetSpeed(REVERSE, 300);HAL_Delay(3000);}
}
四、测试与验证
在连接好硬件并上传程序后,我们可以测试电机的正反转和调速功能。通过调整Motor_SetSpeed函数中的speed参数,我们可以改变电机的转速。
五、总结
使用STM32和TB6612FNG驱动直流电机是一个相对简单的过程,但需要对硬件连接和软件编程有一定的了解。通过本文的介绍,读者应该能够掌握如何使用STM32产生PWM信号来控制电机的速度和方向。
请注意,以上代码仅为示例,实际应用中需要根据具体的STM32型号和TB6612FNG模块的连接方式进行适当的调整。
✅作者简介:热爱科研的嵌入式开发者,修心和技术同步精进
❤欢迎关注我的知乎:对error视而不见
代码获取、问题探讨及文章转载可私信。
☁ 愿你的生命中有够多的云翳,来造就一个美丽的黄昏。
🍎获取更多嵌入式资料可点击链接进群领取,谢谢支持!👇
点击领取更多详细资料
相关文章:

stm32学习探究:利用TB6612驱动直流电机
在这篇文章中,我们将探讨如何使用STM32微控制器和TB6612FNG直流电机驱动模块来驱动直流电机。TB6612FNG是一款基于MOSFET的H桥集成电路,能够独立双向控制两个直流电机,非常适合用于小型机器人或双轮车等项目。 一、TB6612FNG 驱动模块介绍 …...

SpringBatch快速入门
Job监听 Spring Batch的Job监听是一种机制,用于在Job的不同阶段插入自定义的逻辑。它允许开发人员在Job开始、结束、失败等不同的事件发生时执行特定的操作。 具体来说,Spring Batch提供了以下几个Job监听器: JobExecutionListenerÿ…...

下载Node.js及其他环境推荐nvm
文章目录 项目场景:下载Node.js环境配置配置环境变量 安装脚手架安装依赖安装淘宝镜像安装 cnpm(我需要安装)nvm 安装 Node.js (推荐) 项目场景: 提示:这里简述项目相关背景: 项目…...
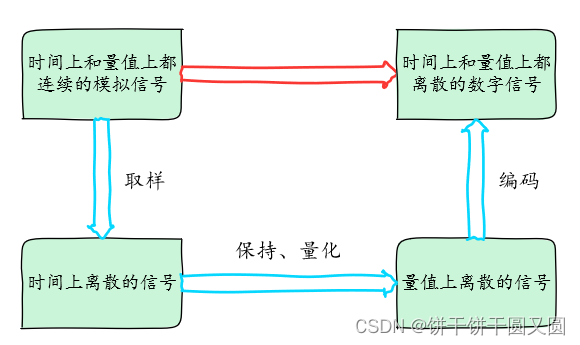
STM32 ADC学习
ADC Analog-to-Digital Converter,即模拟/数字转换器 常见ADC类型 分辨率和采样速度相互矛盾,分辨率越高,采样速率越低。 ADC的特性参数 分辨率:表示ADC能辨别的最小模拟量,用二进制位数表示,比如8,10…...

详解AI作画算法原理
在人工智能领域,AI作画技术已经成为一个引人入胜的研究方向。AI作画算法利用机器学习技术,尤其是深度学习,来生成具有艺术性的图像。本文将深入剖析AI作画的基本原理,包括其技术架构、关键组件以及工作流程。 引言 AI作画技术不…...

每日Attention学习3——Cross-level Feature Fusion
模块出处 [link] [code] [PR 23] Cross-level Feature Aggregation Network for Polyp Segmentation 模块名称 Cross-level Feature Fusion (CFF) 模块作用 双级特征融合 模块结构 模块代码 import torch import torch.nn as nnclass BasicConv2d(nn.Module):def __init__(…...
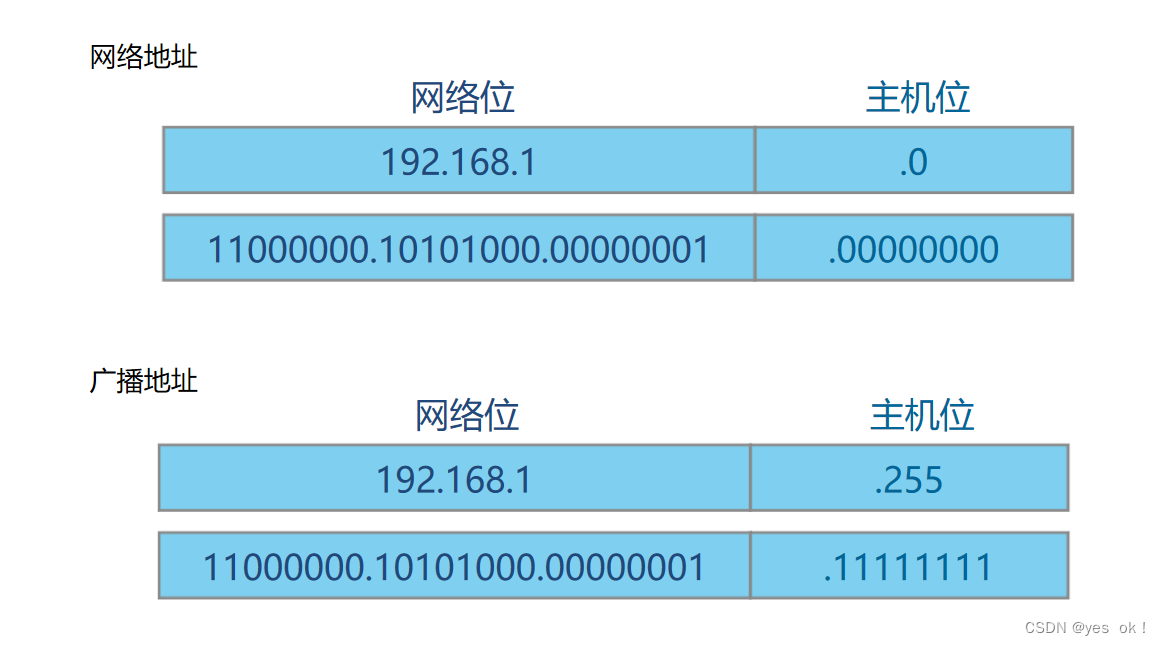
华为eNSP学习—IP编址
IP编址 IP编址子网划分例题展示第一步:机房1的子网划分第二步:机房2的子网划分第三步:机房3的子网划分IP编址 明确:IPv4地址长度32bit,点分十进制的形式 ip地址构成=网络位+主机位 子网掩码区分网络位和主机位 学此篇基础: ①学会十进制与二进制转换 ②学会区分网络位和…...

数据库的要求
本来我是不准备写数据库的。而且是准备从零开始,学习python,学完语言学,会c和写作技法,再来学习数据库 那样做的复杂度是天量的,按部就班什么的具备,因为你完全不清楚什么时候就有这个基础和条件࿰…...
)
Spring MVC(二)
1. 注解RequestMapping修饰类 在Spring MVC中一般都是使用注解RequestMapping来映射请求,也就是通过它来指定控制器可以处理哪些URL请求,相当于Servlet中在web.xml中配置的映射地址作用一致。在上一节的内容中,我们通过注解RequestMapping改进…...

ECP44304T-76是一款增强型通信处理器吗?
ABB ECP44304T-76是一款增强型通信处理器,专为ABB的PLC控制系统设计。 这款通信处理器的主要功能是提供PLC与其他设备或网络之间的通信接口。它支持多种通讯协议,包括但不限于Profibus、Ethernet、Modbus等,使得PLC可以轻松集成到复杂的工业…...
mongoDB分组查询
完整代码 //根据医院编号 和 科室编号 ,查询排班规则数据Overridepublic Map<String, Object> getRuleSchedule(long page, long limit, String hoscode, String depcode) {//1 根据医院编号 和 科室编号 查询Criteria criteria Criteria.where("hosco…...
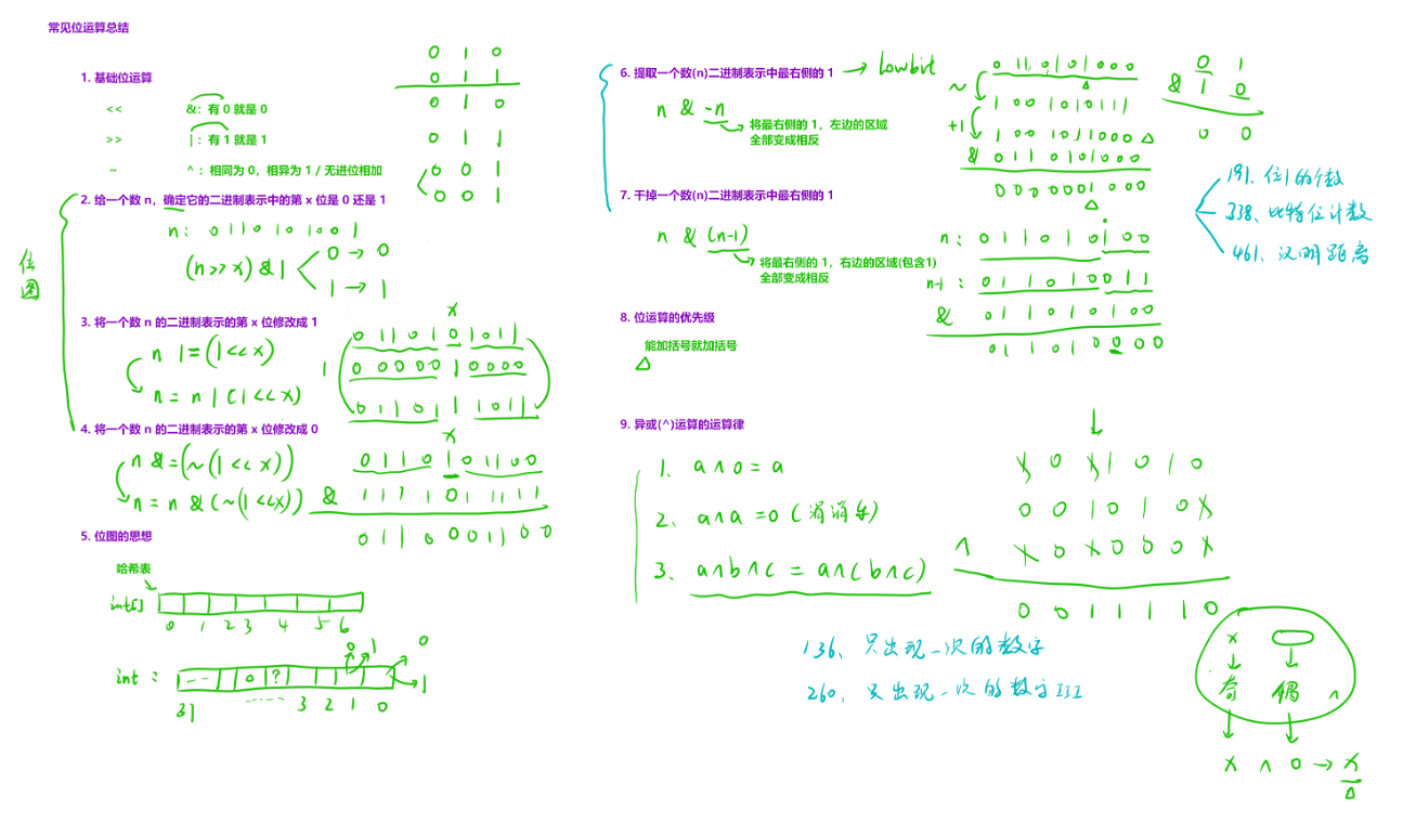
【Java 刷题记录】位运算
位运算 33. 位1的个数 编写一个函数,输入是一个无符号整数(以二进制串的形式),返回其二进制表达式中 设置位 的个数(也被称为汉明重量)。 示例 1: 输入:n 11 输出:3 解释…...
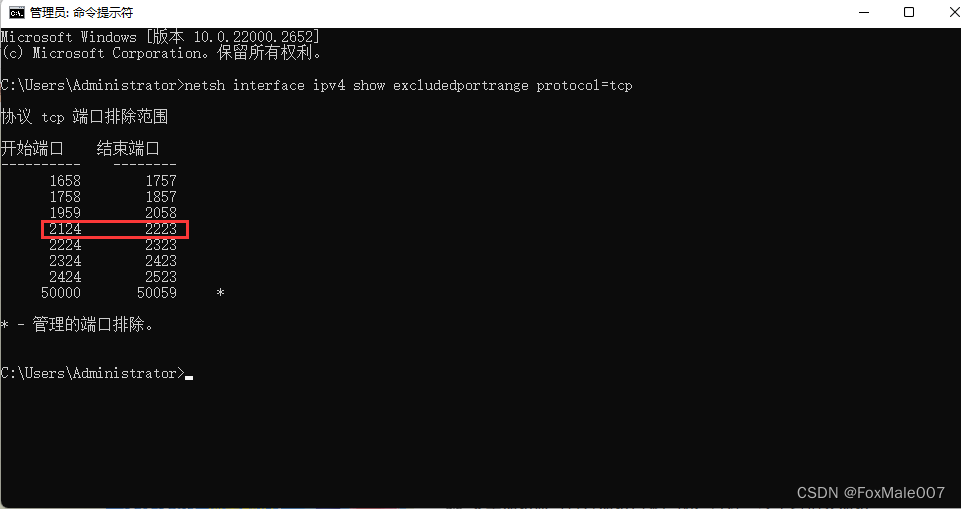
WINDOWS下zookeeper突然无法启动但是端口未占用的解决办法(用了WSL)
windows下用着用着时候突然zookeeper启动不了了。netstat查也没有找到端口占用,就是起不来。控制台报错 java.lang.reflect.UndeclaredThrowableException: nullat org.springframework.util.ReflectionUtils.rethrowRuntimeException(ReflectionUtils.java:147) ~…...

【LLM第三篇】名词解释:RLHF——chatgpt的功臣
RLHF (Reinforcement Learning from Human Feedback) ,直译为:“来自人类反馈的强化学习”。RLHF是一种结合了强化学习和人类反馈的机器学习方法,主要用于训练大模型以执行复杂的任务,尤其是当这些任务难以通过传统的奖励函数来精…...
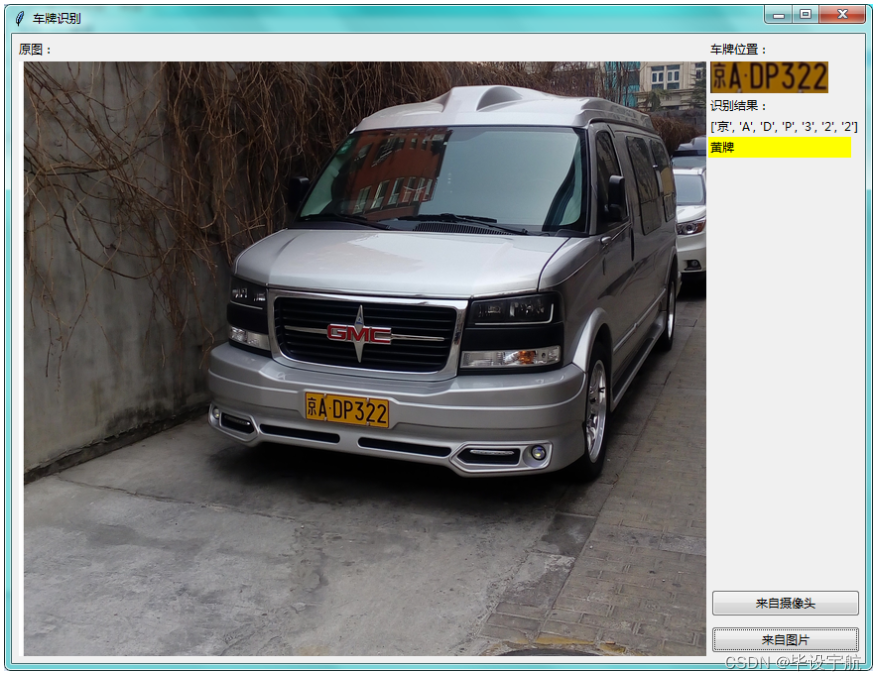
基于Opencv的车牌识别系统(毕业设计可用)
系统架构 图像采集:首先,通过摄像头等设备捕捉车辆图像。图像质量直接影响后续处理的准确性,因此高质量的图像采集是基础。 预处理:对获取的原始图像进行预处理,包括灰度化、降噪、对比度增强和边缘检测等。这些操作旨…...

Leetcode—295. 数据流的中位数【困难】
2024每日刷题(132) Leetcode—295. 数据流的中位数 实现代码 class MedianFinder { public:MedianFinder() {}void addNum(int num) {if(maxHeap.empty() || num < maxHeap.top()) {maxHeap.push(num);} else {minHeap.push(num);}if(maxHeap.size(…...

JavaWeb之过滤器(Filter)与监听器(Listener)
前言 过滤器(Filter) 1.什么是过滤器 2.过滤器的语法格式 3.使用场景 3.1.如何防止用户未登录就执行后续操作 3.2.设置编码方式--统一设置编码 3.3.加密解密(密码的加密和解密) 3.4.非法文字筛选 3.5.下载资源的限制 监听器(Listener) 1.什么是监听器 2.监听器分类…...

video.js的请求头问题
为了防止视频被轻易下载,我们项目需要在请求视频地址的时候,增加token识别,避免url一粘贴到浏览器地址上就能被盗。 明明一开始就找到的方法: // ts-ignorevideojs.Vhs.xhr.beforeRequest function (options) {options.headers …...
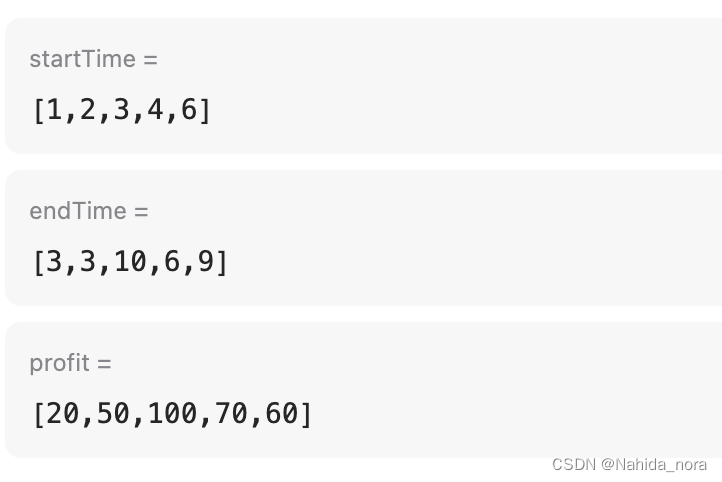
leetcode 1235
leetcode 1235 代码 class Solution { public:int jobScheduling(vector<int>& startTime, vector<int>& endTime, vector<int>& profit) {int n startTime.size();vector<vector<int>> jobs(n);for(int i0; i<n; i){jobs[i] …...
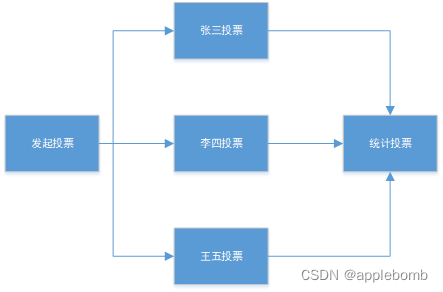
Activiti7 开发快速入门【2024版】
记录开发最核心的部分,理论结合业务实操减少废话,从未接触工作流快速带入开发。假设你是后端的同学学过JAVA和流程图,则可以继续向后看,否则先把基础课程书准备好先翻翻。 为什么要工作流 比起直接使用状态字段,工作…...
)
ElevenLabs语音合成效果翻倍的秘密(行业未公开的声学参数调优矩阵)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs英文语音合成效果翻倍的核心洞察 关键瓶颈在于语音上下文建模粒度 ElevenLabs 的高质量语音合成并非单纯依赖更大模型参数量,而是通过细粒度的语义-韵律联合编码实现自然度跃升。…...

InsForge:基于Python的Instagram内容自动化创作与发布工具全解析
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫InsForge。这名字听起来有点“工业锻造”的味道,实际上,它是一个专注于Instagram内容创作与自动化的工具集。简单来说,它试图帮你解决在Instagram上创作、发布、管理内容…...

终极指南:使用Python开源工具破解百度网盘限速,实现高速免费下载
终极指南:使用Python开源工具破解百度网盘限速,实现高速免费下载 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘几十KB的下载速度而烦恼…...

基于LLM的长文本摘要工具SumGPT:从原理到本地化部署实战
1. 项目概述:一个为长文本摘要而生的智能工具最近在折腾一些文档处理的工作流,发现一个挺普遍但很烦人的痛点:面对动辄几十页的PDF报告、冗长的会议纪要或是海量的研究论文,想要快速抓住核心要点,简直像大海捞针。手动…...

Linuxbonding链路生产排障流程
Linuxbonding链路生产排障流程这是一篇面向中级 Linux 使用者的技术文章,主题聚焦在bonding链路,重点讨论链路聚合、冗余切换和接口状态。在真实生产环境中,bonding链路相关问题往往不会以单一错误形式出现,而是混杂在日志、权限、…...

基于Arduino与TSL2561的光照度测量系统:从硬件连接到软件调试
1. 项目概述:从园艺需求到嵌入式光测量方案最近在折腾一个园艺相关的项目,需要量化评估不同覆盖材料(比如遮阳网、塑料薄膜)对光线透射率的影响。说白了,就是想精确知道,盖上一层材料后,底下还能…...

Nestia:基于TypeScript编译时分析的NestJS端到端类型安全实践
1. 项目概述:当NestJS遇上TypeScript的极致类型安全如果你正在用NestJS开发后端API,并且对TypeScript的类型安全有近乎偏执的追求,那么你很可能已经听说过,或者正在寻找一个能让你“写一次,安全两次”的工具。我说的“…...

从分布式到可分发:大规模软件制品分发架构设计与实践
1. 项目概述:从“分布式”到“可分发”的思维跃迁最近在梳理团队内部的基础设施时,又翻出了distr-sh/distr这个项目。说实话,第一次看到这个仓库名,我下意识地把它归类为又一个“分布式系统”框架。但当我真正点进去,花…...

移动端AI助手开发实战:混合架构、模型部署与性能优化
1. 项目概述:一个移动端AI助手的诞生 最近在移动端AI应用开发圈子里,一个名为 copaw-mobile 的项目开始引起不少同行的注意。这个由 xmingai 团队开源的项目,定位非常清晰——它要做的,就是将一个功能强大的AI助手,…...

符号链接批量管理工具 linko:声明式配置与自动化实践
1. 项目概述与核心价值最近在折腾一些自动化脚本和工具链,发现一个挺有意思的仓库:monsterxx03/linko。乍一看这个名字,你可能会有点懵,这到底是干嘛的?是链接管理工具,还是某种网络代理的客户端࿱…...