C++(week3):数据结构与算法
文章目录
- (十一) 常用数据结构
- 1.动态数组
- (1)模型
- (2).h与.c
- (3)实现
- 2.链表
- (1)模型
- (2)分类
- (3)基本操作(API)
- (4)实现
- (5)链表常见面试题
- (6)空间与时间
- 3.栈
- (1)模型
- (2)基本操作
- (3)实现
- (4)栈的应用
- 4.队列
- (1)模型
- (2)基本操作(API)
- (3)实现
- (4)队列的应用
- 5.哈希表
- (1)哈希表的提出原因
- (2)哈希表的模型
- (3)哈希表的基本操作
- (4)哈希表的理论设计:哈希函数、哈希桶
- (5)哈希表的具体实现 :拉链法
- (6)性能分析
- (7)哈希表的应用:存储键值对数据
- 6.位图
- (1)模型
- (2)基本操作
- (3)实现
- (4)位图的应用
- 7.二叉树
- (1)定义
- (2)二叉树的特殊形态
- (3)二叉搜索树BST的实现
- (0)结构体定义
- ①创建:create
- ②增加:BST的插入 insert
- ③查找:BST的查找 search
- ④删除:BST的删除 delete
- ⑥遍历
- 1)深度优先遍历:递归,需要函数调用栈
- i.前序遍历
- ii.中序遍历
- iii.后序遍历
- 2)广度优先遍历:
- iv.层序遍历(层次遍历):需要队列,需要手动创建
- ⑦销毁:destroy
- (4)BST性能分析
- (5)平衡二叉搜索树
- ①AVL树
- ②红黑树 RBT
- (5)B树
- ①2-3-4树 (四阶B树)
- (6)二叉搜索树的应用
- (7)代码缩进的层次越高,代码的复杂度就越高,可读性越差
- (十二) 排序和二分查找
- 1.二分查找
- 4.实现:2种实现 + 4种变式
- 2.排序算法分析
- 3.选择排序
- 4.冒泡排序
- 5.插入排序
- 6.希尔排序
- 7.归并排序
- (1)分治思想
- (2)合并操作:Merge()
- 8.快速排序
- 9.堆排序
- 10.如何设计一个通用的排序算法
(十一) 常用数据结构
学习数据结构:①模型 ②API ③实现、时间复杂度 ④应用
基础:动态数组、链表
其他数据结构:栈、队列、哈希表、位图、二叉树
算法:排序、二分查找
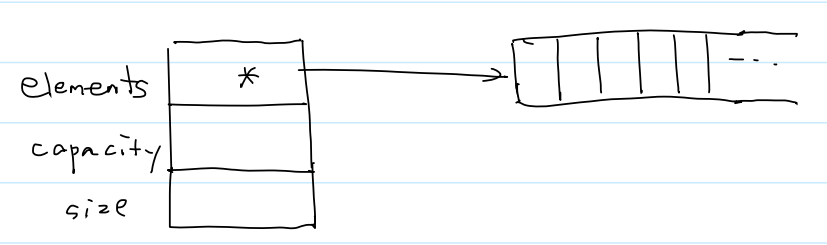
1.动态数组
(1)模型
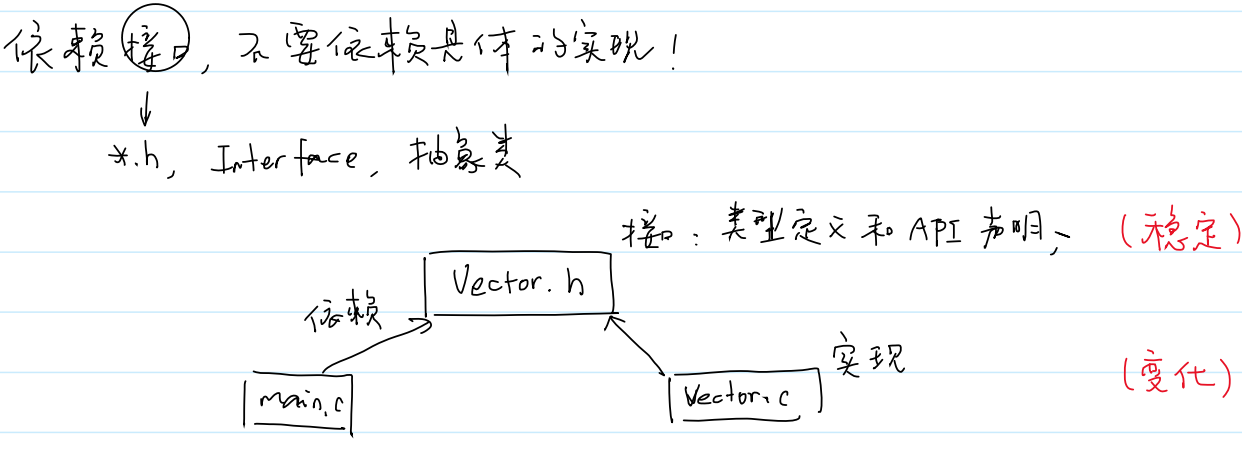
(2).h与.c
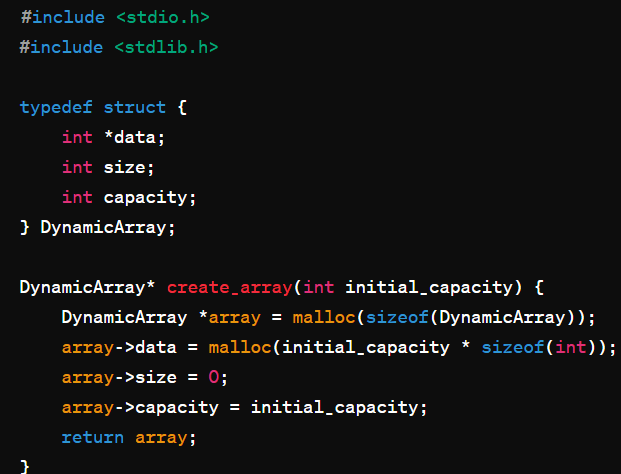
(3)实现
2.链表
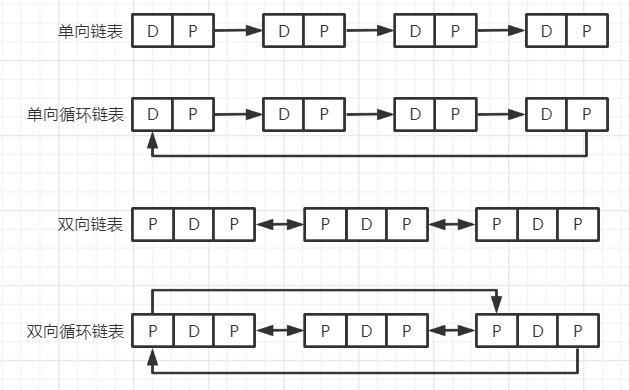
(1)模型
1.单链表
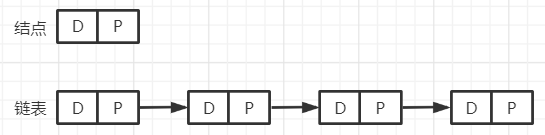
2.双链表

(2)分类
(3)基本操作(API)
1.单链表的基本操作
(1)增加:已知某个结点的指针,在该结点的后面添加新结点:时间复杂度O(1)
(2)删除:已知某个结点的指针,删除该结点后面的结点:时间复杂度O(1)
(3)查找:
①按位查找,根据索引查找结点,时间复杂度O(n)
②按值查找,查找与特定值相等的结点:元素大小无序、元素大小有序,都是O(n)
2.双链表的基本操作
(1)增加
(2)删除
(3)查找
①根据索引查找值
②查找与特定值相等的结点
③查找前驱结点
(4)遍历
①正向遍历
②逆向遍历
(4)实现
(1)结点、单链表定义
typedef struct node{ //结点int data;struct node* next;
} Node;typedef struct { //单链表Node* head;Node* tail;int size;
} List;
(2)析构函数
void node_destroy(Node* head) {Node* cur = head;while (cur != NULL) {Node* next = cur->next;free(cur);cur = next;}
}
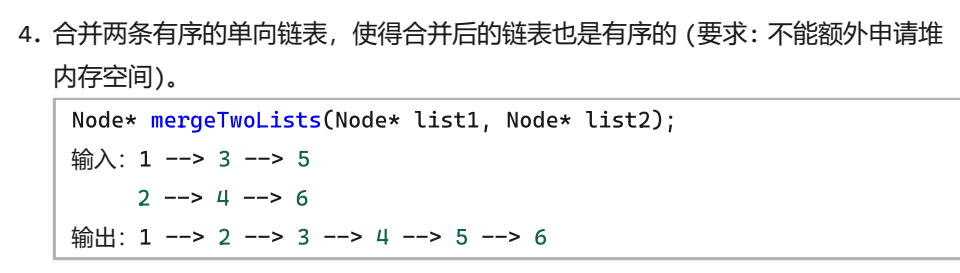
(5)链表常见面试题
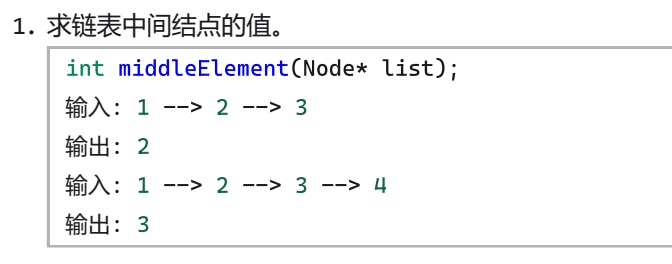
思路1:先遍历一遍,得到链表长度。再遍历第二次,找到中间节点。
时间O(n),空间O(1)
思路2:快慢指针,fast一次走两步,slow一次走一步
时间O(n),空间O(1)
fast == NULL || fast->next == NULL //判断fast到达末尾,短路原则
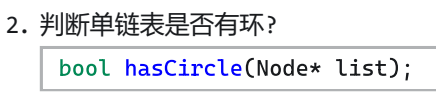
思路1:
用数组保存已遍历过的结点指针
时间:遍历O(n)×查找效率
查找效率:哈希表O(1),链表O(n)
思路2:快慢指针
如果无环,则fast先一定先到终点(变为NULL),slow到中点
如果有环,fast与slow一定会在环中相遇
时间O(n)
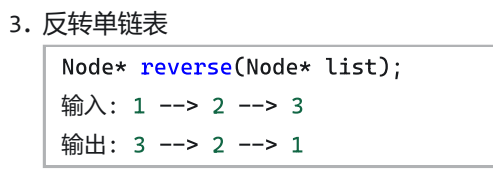
思路1:头插法
思路2:递归
边界条件:head == NULL || head->next == NULL
递归公式:每次只反转第一个结点,假设后n-1个已经反转好了(实际并没有)
时间O(n),空间O(n),栈的深度
dummy node:哑结点(虚拟头结点,不存数据,仅为了方便结点的插入)
(6)空间与时间
①空间换时间:缓存、缓冲
②时间换空间:压缩、交换区(对换区)
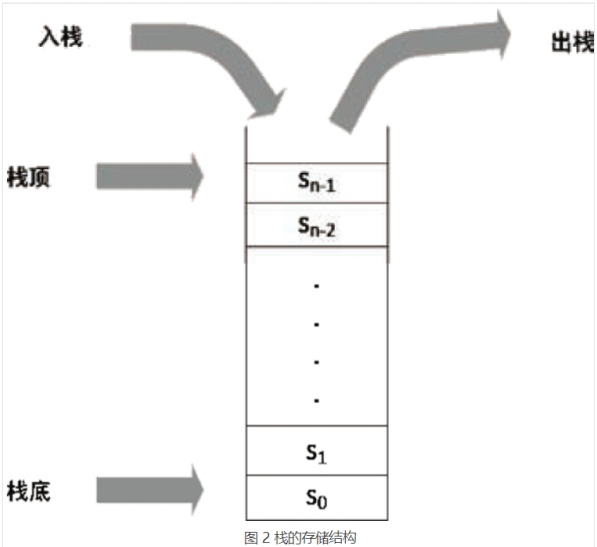
3.栈
(1)模型
栈是操作受限的线性表,只能在同一端添加和删除元素。
能添加的一端称为栈顶(top),不能添加删除的一端称为栈底(bottom)。
特性:FILO,LIFO
Q:为什么需要栈这种数据结构?数组和链表这种线性表不是都能实现吗?
A:①安全 ②可读性强 ③和现实生活中的场景有对应
(2)基本操作
①添加:入栈 Push
②删除:出栈 Pop
③查找:查栈顶 Peek
④判空:Empty
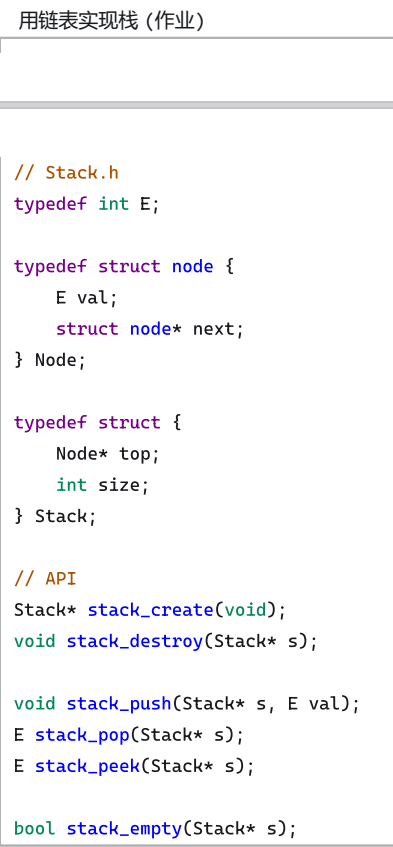
(3)实现
用链表实现链栈
(1)构造函数
Stack* stack_create(void) {return calloc(1, sizeof(Stack));
}
(2)析构函数
void stack_destroy(Stack* s) {Node* curr = s->top;while (curr != NULL) {Node* next = curr->next;free(curr);curr = next;}free(s);
}
(3)入栈
void stack_push(Stack* s, E val) {Node* push = calloc(1,sizeof(Node));if (push == NULL) {printf("Error: push failed because calloc failed.\n");exit(1);}push->next = s->top;push->data = val;s->top= push;s->size++;
}
(4)出栈
E stack_pop(Stack* s) {if (stack_empty(s)) {printf("Error: stack is empty, pop failed.\n");exit(1);}Node* remove = s->top;s->top = s->top->next;int ret_value = remove->data;free(remove);s->size--;return ret_value;
}
(5)查找栈顶元素
E stack_peek(Stack* s) {if (stack_empty(s)) {printf("Error: peek failed because the stack is empty.\n");exit(1);}return s->top->data;
}
(6)判空
bool stack_empty(Stack* s) {return s->size == 0;
}
(7)完整代码
//stack.h
#include <stdbool.h>
typedef int E;typedef struct node {E data;struct node* next;
} Node;typedef struct {Node* top;int size;
} Stack;// API
Stack* stack_create(void);
void stack_destroy(Stack* s);void stack_push(Stack* s, E val);
E stack_pop(Stack* s);
E stack_peek(Stack* s);bool stack_empty(Stack* s);
//stack.c
#include "stack.h"
#include <stdlib.h>
#include <stdio.h>Stack* stack_create(void) {return calloc(1, sizeof(Stack));
}void stack_destroy(Stack* s) {Node* curr = s->top;while (curr != NULL) {Node* next = curr->next;free(curr);curr = next;}free(s);
}void stack_push(Stack* s, E val) {Node* push = calloc(1,sizeof(Node));if (push == NULL) {printf("Error: push failed because calloc failed.\n");exit(1);}push->next = s->top;push->data = val;s->top= push;s->size++;
}E stack_pop(Stack* s) {if (stack_empty(s)) {printf("Error: stack is empty, pop failed.\n");exit(1);}Node* remove = s->top;s->top = s->top->next;int ret_value = remove->data;free(remove);s->size--;return ret_value;
}E stack_peek(Stack* s) {if (stack_empty(s)) {printf("Error: peek failed because the stack is empty.\n");exit(1);}return s->top->data;
}bool stack_empty(Stack* s) {return s->size == 0;
}
//main.c
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include "stack.h"
#include <stdio.h>int main(void) {Stack* s = stack_create();stack_push(s,1);stack_push(s,2);stack_push(s,3);stack_push(s,4);stack_destroy(s);return 0;
}
(4)栈的应用
特性:后进先出 LIFO
(1)函数调用栈
(2)符号匹配问题
(3)用单调栈表示优先级:表达式求值
(4)用栈来记录轨迹:
①递归
②网页的前进后退(前进栈、后退栈)
③深度优先搜索(DFS)
④回溯算法
⑤树的前中后序遍历
(5)进制转换
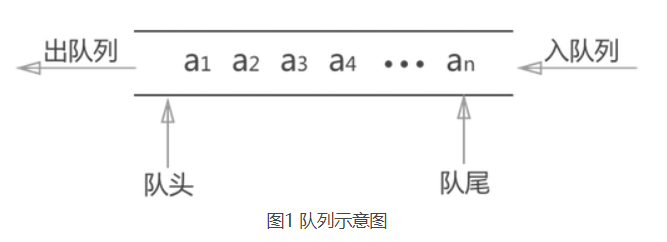
4.队列
(1)模型
队列是操作受限的线性表,一端添加元素,另一端删除元素
队尾(rear)添加元素,队头(front)删除元素
特性:FIFO,先进先出 (公平)
(2)基本操作(API)
①添加:入队列(queue_push)
②删除:出队列(queue_pop)
③查找:查看队头元素(queue_peek)
④判空:queue_empty
⑤判满:queue_full
(3)实现
(1)循环数组:用动态数组实现 顺序队列
(2)链表
a.只用rear标识队尾。缺点:出队 O(n)
b.front标识队头,rear标识队尾。缺点:极大浪费内存空间,否则需要大量移动元素
c.“循环”数组,实现循环队列。缺点:判空判满时都是 rear == front
d.①牺牲一个存储单元,有一个空间不存元素,认为已满,(rear+1)%capacity == front ②添加属性size,判空size == 0,判满size == capacity
if(rear == capacity){grow_capacity();
}
elements[rear] = val;
rear = (rear + 1)%capacity;
(1)构造函数
Queue* queue_create() {Queue* queue = calloc(1, sizeof(Queue));queue->elements = calloc(DEFAULT_SIZE, sizeof(E));queue->capacity = DEFAULT_SIZE;return queue;
}
(2)析构函数
void queue_destroy(Queue* q) {free(q->elements); //释放的是手动malloc的内容free(q);
}
(3)入队
void queue_push(Queue* q, E val) {if (q->size == q->capacity) {grow_capacity(q); //自动扩容}q->elements[q->rear] = val;q->rear = (q->rear + 1) % q->capacity;q->size++;
}
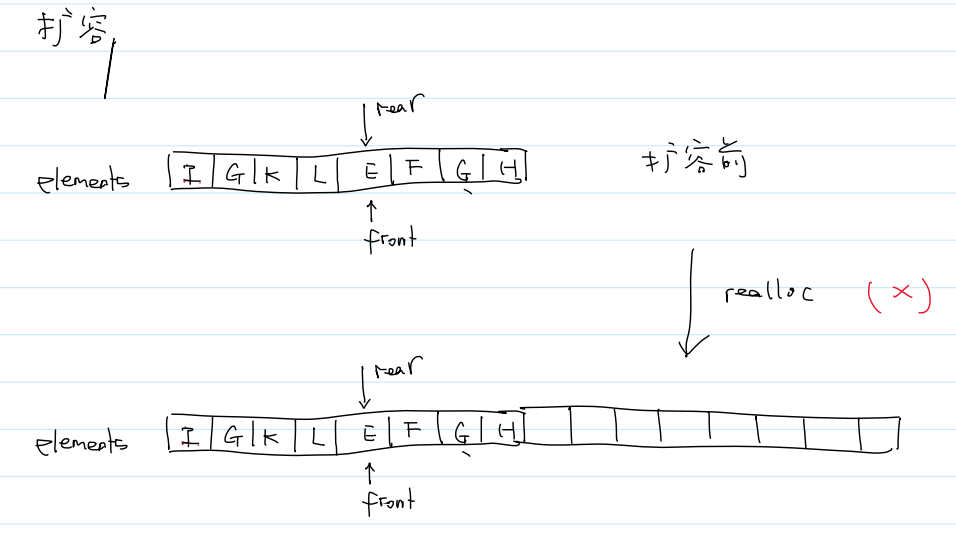
(4)自动扩容
//自动扩容
void grow_capacity(Queue* q) {if (q->size >= MAX_SIZE) {printf("Error: push failed, because queue size has reached MAX_SIZE.\n");printf("size = %d, capacity = %d, MAX_SIZE = %d\n", q->size, q->capacity, MAX_SIZE);exit(-1);}int new_capacity = (q->capacity << 1) < MAX_SIZE ? (q->capacity << 1) : MAX_SIZE;E* new_arr = calloc(new_capacity, sizeof(E));if (!new_arr) {printf("calloc failed of new_arr in grow_capacity.\n");exit(-1);}for (int i = 0; i < q->size; i++) {new_arr[i] = q->elements[q->front];q->front = (q->front + 1) % q->capacity;}E* temp = q->elements;free(temp);q->elements = new_arr;q->front = 0;q->rear = q->size; //下一个要插入元素的位置,目前为空q->capacity = new_capacity;
}
自动扩容原理
(5)出队
E queue_pop(Queue* q) {if (queue_empty(q)) {printf("Error: pop failed, because queue is empty.\n");exit(-1);}int ret_val = q->elements[q->front];q->front = (q->front + 1) % q->capacity;q->size--;return ret_val;
}
(6)查找队头元素
E queue_peek(Queue* q) {if (queue_empty(q)) {printf("Error: peek failed, because queue is empty.\n");exit(-1);}return q->elements[q->front];
}
(7)队列判空
bool queue_empty(Queue* q) {return q->size == 0;
}
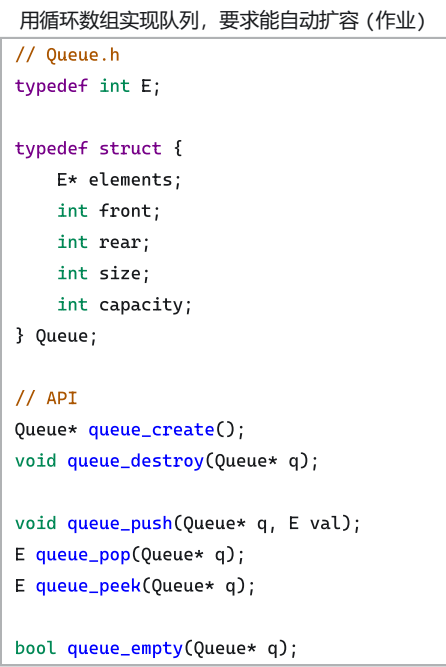
(8)完整代码
//queue.h
#include <stdbool.h>typedef int E;typedef struct {E* elements;int front;int rear;int size; //实际大小int capacity; //容量
} Queue;// API
Queue* queue_create();
void queue_destroy(Queue* q);void queue_push(Queue* q, E val);
E queue_pop(Queue* q);
E queue_peek(Queue* q);bool queue_empty(Queue* q);
//queue.c
#include "queue.h"
#include <stdlib.h>
#include <stdio.h>
#define MAX_SIZE 100
#define DEFAULT_SIZE 10Queue* queue_create() {Queue* queue = calloc(1, sizeof(Queue));queue->elements = calloc(DEFAULT_SIZE, sizeof(E));queue->capacity = DEFAULT_SIZE;return queue;
}void queue_destroy(Queue* q) {free(q->elements); //释放的是手动malloc的内容free(q);
}//自动扩容
void grow_capacity(Queue* q) {if (q->size >= MAX_SIZE) {printf("Error: push failed, because queue size has reached MAX_SIZE.\n");printf("size = %d, capacity = %d, MAX_SIZE = %d\n", q->size, q->capacity, MAX_SIZE);exit(-1);}int new_capacity = (q->capacity << 1) < MAX_SIZE ? (q->capacity << 1) : MAX_SIZE;E* new_arr = calloc(new_capacity, sizeof(E));if (!new_arr) {printf("calloc failed of new_arr in grow_capacity.\n");exit(-1);}for (int i = 0; i < q->size; i++) {new_arr[i] = q->elements[q->front];q->front = (q->front + 1) % q->capacity;}E* temp = q->elements;free(temp);q->elements = new_arr;q->front = 0;q->rear = q->size; //下一个要插入元素的位置,目前为空q->capacity = new_capacity;
}void queue_push(Queue* q, E val) {if (q->size == q->capacity) {grow_capacity(q); //自动扩容}q->elements[q->rear] = val;q->rear = (q->rear + 1) % q->capacity;q->size++;
}E queue_pop(Queue* q) {if (queue_empty(q)) {printf("Error: pop failed, because queue is empty.\n");exit(-1);}int ret_val = q->elements[q->front];q->front = (q->front + 1) % q->capacity;q->size--;return ret_val;
}E queue_peek(Queue* q) {if (queue_empty(q)) {printf("Error: peek failed, because queue is empty.\n");exit(-1);}return q->elements[q->front];
}bool queue_empty(Queue* q) {return q->size == 0;
}
//main.c
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include "queue.h"//单元测试
int main(void) {Queue* q = queue_create();queue_push(q, 1);queue_push(q, 2);queue_push(q, 3);queue_push(q, 4);return 0;
}
(4)队列的应用
(1)缓冲:①打印缓冲区 ②秒杀队列(有界队列) ③消息队列 (中间件) (协调分布式)
(2)广度优先搜索 BFS:社交软件三度好友、树的层次遍历
5.哈希表
(1)哈希表的提出原因
(1)用数组表示键值对,限制:
①键的取值范围很小
②键可以很容易地转换成数组的下标
(2)若不满足上述两个限制条件,则引入了哈希表来表示 key-value数据
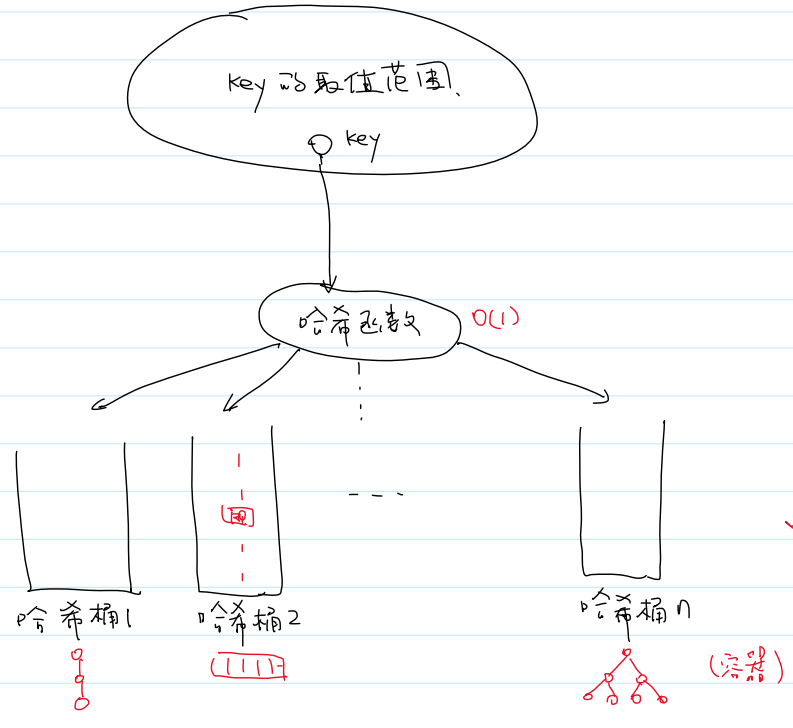
(2)哈希表的模型
①key的取值范围
②哈希函数:时间复杂度O(1)
③哈希桶
(同一个哈希表,可以用不同数据结构的哈希桶:链表、数组、红黑树)
(3)哈希表的基本操作
(1)增加:put(key,val),给一个key,通过哈希函数,添加到对应的哈希桶中
(2)删除:delete(key),根据key来删除键值对
(3)查找:val = get(key)
(4)遍历:依次遍历每一个哈希桶
(4)哈希表的理论设计:哈希函数、哈希桶
(1)哈希函数
哈希函数作为数据的指纹
性能非常好的哈希函数的性质:
①速度快 :O(1)
②哈希值(键值)尽量平均分布
③哈希碰撞的概率非常低 (哈希值→指纹)
④对数据非常敏感
⑤逆向非常困难:不能通过hash值→data,只能data→hash值
哈希函数就是在模仿等概率随机事件
(2)哈希桶:处理哈希冲突,是一种“逻辑结构”
①开放地址法:
i.线性探测法
ii.平方探测法
iii.再散列法 (多个哈希函数,冲突了就用下一个哈希函数)
查找跳转链接:https://blog.csdn.net/Edward1027/article/details/131129113
②拉链法:
拉链法的实现
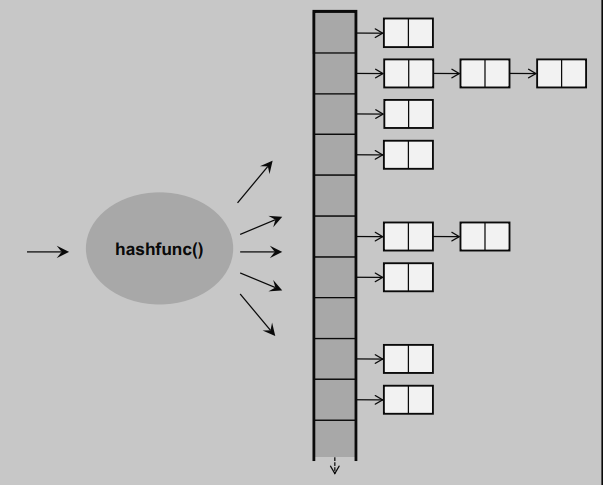
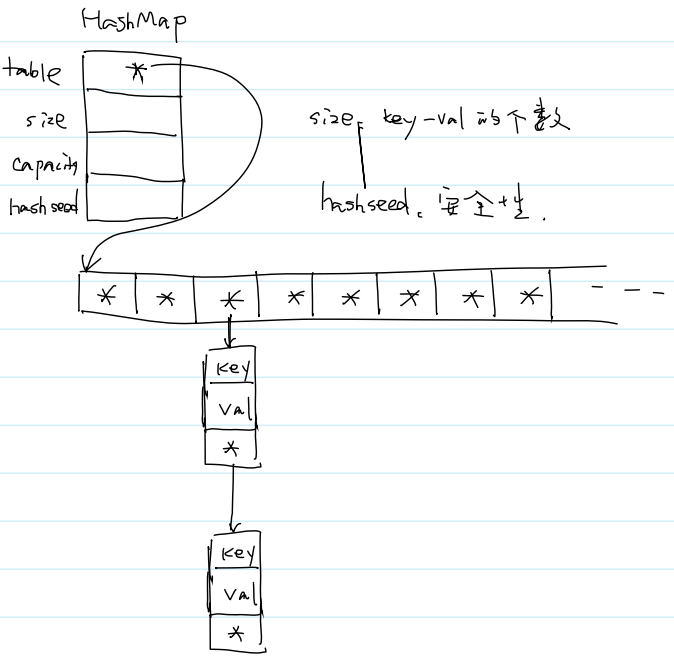
table里存放的是指针。若为NULL则下方无链表,若不为NULL,则为链表的起始地址,即链表头结点的地址。
当结点去掉value,只有key时,哈希表就从存储键值对变成了只存key,即集合
(5)哈希表的具体实现 :拉链法
(1)构造 create
HashMap* hashmap_create(void) {HashMap* map = malloc(sizeof(HashMap));map->table = calloc(DEFAULT_CAPACITY, sizeof(Node*));map->size = 0;map->capacity = DEFAULT_CAPACITY;map->hashseed = time(NULL);return map;
}
(2)析构 destroy
void hashmap_destroy(HashMap* map) {//1.释放所有的结点(遍历哈希表)for (int i = 0; i < map->capacity; i++) {Node* curr = map->table[i];while (curr) {Node* next = curr->next;free(curr);curr = next;} // curr == NULL}//2.释放动态数组free(map->table);//3.释放HashMap结构体free(map);
}
(3)增加 put
// 如果key不存在:则添加(key, val)。如果key存在,更新key关联的值,并返回原来关联的值。
//put:返回旧值,若是新结点则返回NULL
V hashmap_put(HashMap* map, K key, V val) {//对key进行哈希,判断key在哪个哈希桶中(哪一条链表中)int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {//b.更新key关联的值,并返回原来的值V oldval = curr->val;curr->val = val;return oldval;}curr = curr->next;}//a.添加一个结点保存键值对 key-val,并返回NULL//判断扩容:如果达到负载因子,则扩容if( ((float)map->size+1)/map->capacity > LOAD_FACTOR){grow_capacity(map);idx = hash(key, strlen(key), map->hashseed) % map->capacity; //重新计算索引}Node* new_node = malloc(sizeof(Node));new_node->key = key;new_node->val = val;//头插法new_node->next = map->table[idx];map->table[idx] = new_node;map->size++;return NULL;
}
(4)查找 get
V hashmap_get(HashMap* map, K key) {//对key进行哈希,判断key在哪个哈希桶中int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {return curr->val;}curr = curr->next;} //curr == NULLreturn NULL;
}
(5)删除 delete
//删除键值对,如果key不存在,则什么也不做
void hashmap_delete(HashMap* map, K key) {//对key进行哈希,判断key在哪个哈希桶中int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* prev = NULL;Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {//删除curr结点if (prev == NULL) {map->table[idx] = curr->next;}else{prev->next = curr->next;}free(curr);map->size--;return;}prev = curr;curr = curr->next;} // curr == NULL
}
(6)哈希表的扩容
void grow_capacity(HashMap* map) {int new_capacity = 2 * map->capacity;Node** new_table = calloc(new_capacity, sizeof(Node*)); if (!new_table) {printf("calloc failed of new_arr in grow_capacity\n");exit(1);}//重新映射(rehash)map->hashseed = time(NULL)-10086;for (int i = 0; i < map->capacity; i++) {Node* curr = map->table[i]; while (curr) {Node* next = curr->next;//使用新的容量重新计算哈希值并找到新的索引int new_idx = hash(curr->key, strlen(curr->key), map->hashseed) % new_capacity;//将当前节点插入到新表的相应位置,头插法curr->next = new_table[new_idx];new_table[new_idx] = curr;curr = next;}}//释放旧的表free(map->table);//更新结构体信息map->capacity = new_capacity;map->table = new_table;return;
}
(7)完整代码
//HashMap.h
#include <stdint.h>// HashMap.h
typedef char* K;
typedef char* V;typedef struct node {K key;V val;struct node* next;
} Node;typedef struct {Node** table;int size; //实际大小int capacity; //最大容量uint32_t hashseed;
} HashMap;HashMap* hashmap_create();
void hashmap_destroy(HashMap* map);
V hashmap_put(HashMap* map, K key, V val);
V hashmap_get(HashMap* map, K key);
void hashmap_delete(HashMap* map, K key);
static uint32_t hash(const void* key, int len, uint32_t seed);
//HashMap.c
#include "HashMap.h"
#include <stdlib.h>
#include <time.h>
#include <stdio.h>#define DEFAULT_CAPACITY 8
#define LOAD_FACTOR 0.75HashMap* hashmap_create(void) {HashMap* map = malloc(sizeof(HashMap));map->table = calloc(DEFAULT_CAPACITY, sizeof(Node*));map->size = 0;map->capacity = DEFAULT_CAPACITY;map->hashseed = time(NULL);return map;
}void hashmap_destroy(HashMap* map) {//1.释放所有的结点(遍历哈希表)for (int i = 0; i < map->capacity; i++) {Node* curr = map->table[i]; while (curr) {Node* next = curr->next;free(curr);curr = next;} // curr == NULL}//2.释放动态数组free(map->table);//3.释放HashMap结构体free(map);
}/* murmurhash2 */
// key: 关键字的地址
// len: 关键字的字节长度
// seed: 哈希种子,避免攻击
static uint32_t hash(const void* key, int len, uint32_t seed) {const uint32_t m = 0x5bd1e995;const int r = 24;uint32_t h = seed ^ len;const unsigned char* data = (const unsigned char*)key;while (len >= 4) {uint32_t k = *(uint32_t*)data;k *= m;k ^= k >> r;k *= m;h *= m;h ^= k;data += 4;len -= 4;}switch (len){case 3: h ^= data[2] << 16;case 2: h ^= data[1] << 8;case 1: h ^= data[0];h *= m;};h ^= h >> 13;h *= m;h ^= h >> 15;return h;
}void grow_capacity(HashMap* map) {int new_capacity = 2 * map->capacity;Node** new_table = calloc(new_capacity, sizeof(Node*)); if (!new_table) {printf("calloc failed of new_arr in grow_capacity\n");exit(1);}//重新映射(rehash)map->hashseed = time(NULL)-10086;for (int i = 0; i < map->capacity; i++) {Node* curr = map->table[i]; while (curr) {Node* next = curr->next;//使用新的容量重新计算哈希值并找到新的索引int new_idx = hash(curr->key, strlen(curr->key), map->hashseed) % new_capacity;//将当前节点插入到新表的相应位置,头插法curr->next = new_table[new_idx];new_table[new_idx] = curr;curr = next;}}//释放旧的表free(map->table);//更新结构体信息map->capacity = new_capacity;map->table = new_table;return;
}// 如果key不存在:则添加(key, val)。如果key存在,更新key关联的值,并返回原来关联的值。
//put:返回旧值,若是新结点则返回NULL
V hashmap_put(HashMap* map, K key, V val) {//对key进行哈希,判断key在哪个哈希桶中(哪一条链表中)int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {//b.更新key关联的值,并返回原来的值V oldval = curr->val;curr->val = val;return oldval;}curr = curr->next;}//a.添加一个结点保存键值对 key-val,并返回NULL//判断扩容:如果达到负载因子,则扩容if( ((float)map->size+1)/map->capacity > LOAD_FACTOR){grow_capacity(map);idx = hash(key, strlen(key), map->hashseed) % map->capacity; //重新计算索引}Node* new_node = malloc(sizeof(Node));new_node->key = key;new_node->val = val;//头插法new_node->next = map->table[idx];map->table[idx] = new_node;map->size++;return NULL;
}V hashmap_get(HashMap* map, K key) {//对key进行哈希,判断key在哪个哈希桶中int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {return curr->val;}curr = curr->next;} //curr == NULLreturn NULL;
}//删除键值对,如果key不存在,则什么也不做
void hashmap_delete(HashMap* map, K key) {//对key进行哈希,判断key在哪个哈希桶中int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* prev = NULL;Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {//删除curr结点if (prev == NULL) {map->table[idx] = curr->next;}else{prev->next = curr->next;}free(curr);map->size--;return;}prev = curr;curr = curr->next;} // curr == NULL
}
//main.c
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include "HashMap.h"int main(void) {//1.创建空的哈希表HashMap* map = hashmap_create();//2.添加键值对hashmap_put(map, "liuqiangdong", "zhangzetian");hashmap_put(map, "wangbaoqiang", "marong");hashmap_put(map, "wenzhang", "mayili");hashmap_put(map, "jianailiang", "lixiaolu");hashmap_delete(map, "liuqiangdong");hashmap_delete(map, "peanut");hashmap_destroy(map);return 0;
}
(6)性能分析
get:O(L)
put:O(L)
delete:O(L)
当加载因子足够小,就认为是O(1)
加载因子/装填因子(Load Factor) 一般为0.75
哈希表是用空间换时间的数据结构
(7)哈希表的应用:存储键值对数据
举例:Redis(C语言实现),是内存数据库,是键值对数据库,底层大量使用了哈希表。用Redis作缓存。
6.位图
(1)模型
位的数组。位图是内存紧凑的数据结构
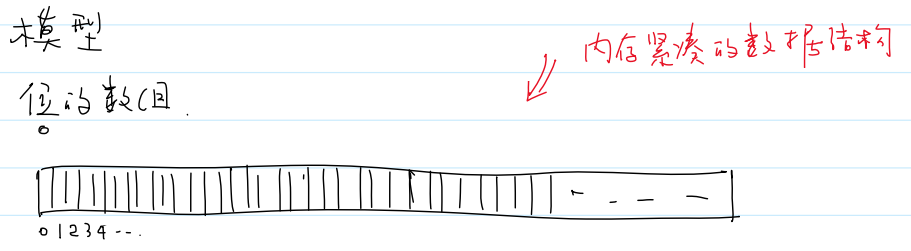
Q:为什么需要构建一个专门的数据结构来表示位的数组?
A:计算机的最小寻址单元是字节,而不是位
(2)基本操作
(1)增加:set,将某一位置为1
(2)删除:①unset,将某一位置为0 ②clear,将所有位置0
(3)查找:isset,检查某一位是否为1
(4)遍历
(3)实现
(1)Word(uint32_t):①大小是确定的 ②无符号整数
(2)定义宏:
#define BITS_PER_WORD 32 //一个字有多少比特
#define BITMAP_SHIFT 5
#define BITMAP_MASK 0x1F //取余,对32取余
#define BITMAP_SIZE(bits) (bits+BITS_PER_WORD-1) >> BITMAP_SHIFT //存这些位需要大? 向下取整变向上取整
//BitMap.h
// BitMap.h
#include <stdint.h>
#include <stdlib.h>
#include <stdbool.h>typedef struct {//uint32_t:1.大小确定,是32位 2.无符号数 (这里不能用int,因为int类型可能32位可能64位,不同系统大小不同)uint32_t* array; //array 是动态数组size_t bits; //number of bits in the array
} BitMap;BitMap* bitmap_create(size_t bits);
void bitmap_destroy(BitMap* bm);
void bitmap_set(BitMap* bm, size_t n); // n is a bit index
void bitmap_unset(BitMap* bm, size_t n);
bool bitmap_isset(BitMap* bm, size_t n);
void bitmap_clear(BitMap* bm);
//BitMap.c
#include "BitMap.h"
#include <stdlib.h>
#include <stdint.h>
#include <stdlib.h>
#include <string.h>
#include <stdio.h>#define BITS_PER_WORD 32
#define BITMAP_SHIFT 5
#define BITMAP_MASK 0X1F
#define BITMAP_SIZE(bits) ((bits+BITS_PER_WORD-1) >> BITMAP_SHIFT) //存储bits位, 需要多少个字 wordtypedef uint32_t Word;// bits 是 位图的长度
BitMap* bitmap_create(size_t bits) {BitMap* bm = malloc(sizeof(BitMap));bm->array = (Word*)calloc(BITMAP_SIZE(bits), sizeof(Word));bm->bits = bits;return bm;
}void destroy(BitMap* bm) {free(bm->array);free(bm);
}void grow_capacity(BitMap* bm, size_t bits) {//位图:内存紧凑的数据结构//扩容策略: 需要多大,就申请多大的内存空间uint32_t* new_array = realloc(bm->array, BITMAP_SIZE(bits) * sizeof(Word));if (!new_array) {printf("Error: realloc failed in grow_capacity\n");exit(1);}bm->array = new_array;//将扩容的部分置为0int bytes = (BITMAP_SIZE(bits) - BITMAP_SIZE(bm->bits)) * sizeof(Word);memset(bm->array + BITMAP_SIZE(bm->bits), 0, bytes);
}//设置索引为n的位
//100, 32*4 = 128
void bitmap_set(BitMap* bm, size_t n) {if (n >= bm->bits) {if (BITMAP_SIZE(n + 1) > BITMAP_SIZE(bm->bits)) {//扩容grow_capacity(bm, n + 1);}bm->bits = n + 1;}//设置第n位//如何表示第n位 (word,offset)size_t word = n >> BITMAP_SHIFT;size_t offset = n & BITMAP_MASK;bm->array[word] |= (0x1 << offset);
}void bitmap_unset(BitMap* bm, size_t n) {if (n >= bm->bits) {return;}//找到第n位 (word,offset)size_t word = n >> BITMAP_SHIFT;size_t offset = n & BITMAP_MASK;return bm->array[word] & (0x1 << offset);
}bool bitmap_isset(BitMap* bm, size_t n) {if (n >= bm->bits) {return false;}//找到第n位 (word, offset)size_t word = n >> BITMAP_SHIFT;size_t offset = n & BITMAP_MASK;return bm->array[word] & (0x1 << offset);
}void bitmap_clear(BitMap* bm) {size_t bytes = BITMAP_SIZE(bm->bits) * sizeof(Word);memset(bm->array, 0, bytes);
}
//main.c
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include "BitMap.h"int main(void) {BitMap* bm = bitmap_create(100);bitmap_set(bm, 9);bitmap_set(bm, 5);bitmap_set(bm, 2);bitmap_set(bm, 7);bitmap_set(bm, 120);bitmap_set(bm, 128);//bitmap_unset(bm, 9);//bitmap_unset(bm, 5);//bitmap_unset(bm, 2);//bitmap_unset(bm, 7);//bitmap_unset(bm, 10);// printf("bitmap_isset(bm, 7) = %s\n", bitmap_isset(bm, 7) ? "true" : "false");// printf("bitmap_isset(bm, 10) = %s\n", bitmap_isset(bm, 10) ? "true" : "false");bitmap_clear(bm);return 0;
}
(4)位图的应用
位图的特点:内存紧凑、可以存储两种状态
①存储两种状态 (内存吃紧的情况下,数据量很大):QQ10亿用户,存储每一位用户的在线状态(是/否)
②排序并去重:直接把对应数字的位置1,相当于去重了,再遍历位图把为1的摘出来
7.二叉树
(1)定义
二叉树的定义:每一个结点的度≤2 (度:结点的孩子的数目)
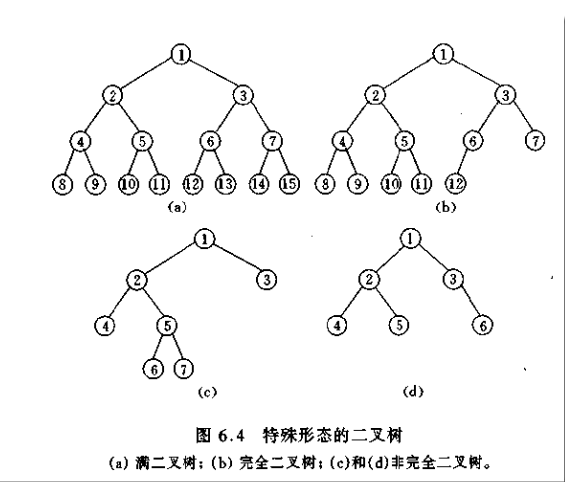
(2)二叉树的特殊形态
1.完全二叉树:若二叉树的深度为 h,除第 h 层外,其它各层(1~h-1)的结点数目都达
到最大值,第 h 层的结点都连续排列在最左边,这样的二叉树就是完全二叉树。
2.满二叉树:每一层的结点数目都达到最大值(包括最下面一层) [满二叉树真包含于完全二叉树]
3.二叉搜索树 (BST,Binary Search Tree)
又叫二叉排序树,要求树中的结点可以按照某个规则进行比较,其定义如下:
①左子树中所有结点的 key 值都比根结点的 key 值小,并且左子树也是二叉搜索树。
②右子树中所有结点的 key 值都比根结点的 key 值大,并且右子树也是二叉搜索树。
(3)二叉搜索树BST的实现
查找路径:一条带选择的链表,尾插法
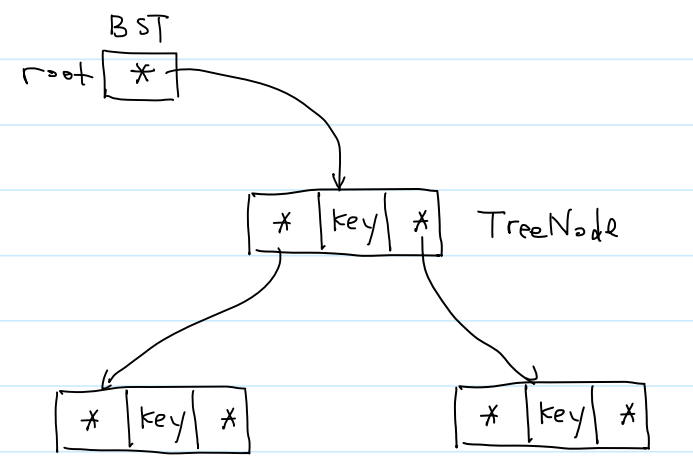
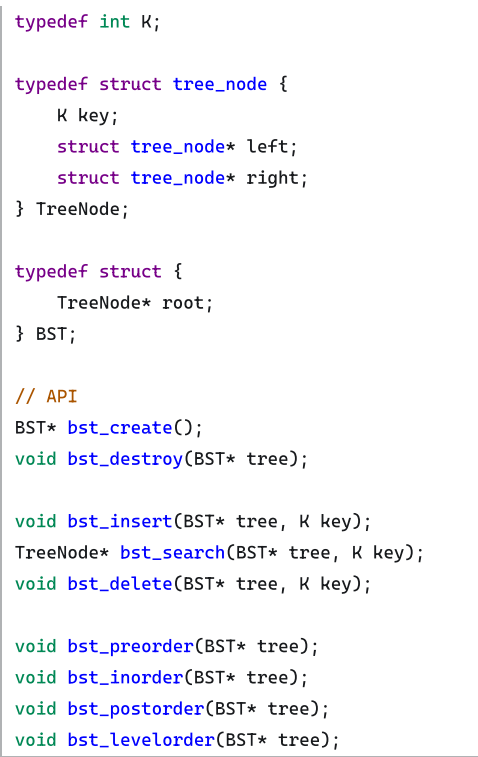
(0)结构体定义
①以前王道书应试的做法,就是直接在第一个结构体最后一行加上 *BST
②之所以把结构体指针 TreeNode* 另起一个结构体,就是为了方便后续扩展。可能BST结构体中还要加入size、height等成员。
typedef int K;typedef struct tree_node {K key;struct tree_node* left;struct tree_node* right;
} TreeNode;typedef struct {TreeNode* root;
} BST;
①创建:create
BST* bst_create(void) {return calloc(1, sizeof(BST));
}
②增加:BST的插入 insert
③查找:BST的查找 search
TreeNode* bst_search(BST* tree, K key) {TreeNode* curr = tree->root; //申请一个树结点指针,指向根结点while (curr) {int cmp = key - curr->key;if (cmp < 0) { //目标值 < 当前值curr = curr->left; //向左走}else if (cmp > 0) { //目标值 > 当前值curr = curr->right; //向右走 }else { //目标值 = 当前值return curr; //找到目标,返回当前树结点指针}} // curr == NULLreturn NULL; //未找到目标,返回空指针
}
④删除:BST的删除 delete
⑥遍历
1)深度优先遍历:递归,需要函数调用栈
i.前序遍历
前序遍历 / 先序遍历 / 先根遍历
时间复杂度:O(4n)=O(n)
void preorder(TreeNode* root) {//边界条件if (root == NULL) {return;}//递归公式:根左右printf("%d", root->key);preorder(root->left);preorder(root->right);
}//先根遍历:委托(外包)
void bst_preorder(BST* tree) {preorder(tree->root);printf("\n");
}
ii.中序遍历
二叉搜索树的中序遍历是有序的,因此又称为二叉排序树。
void inorder(TreeNode* root) {// 边界条件if (root == NULL) {return;}// 递归公式: 左根右inorder(root->left); // 遍历左子树printf("%d ", root->key); // 遍历根结点inorder(root->right); // 遍历右子树
}//中序遍历:委托(外包)
void bst_inorder(BST* tree) {inorder(tree->root);printf("\n");
}
iii.后序遍历
void postorder(TreeNode* root) {//边界条件if (root == NULL) {return;}//递归公式:左右根postorder(root->left);postorder(root->right);printf("%d ", root->key);
}//后序遍历:委托(外包)
void bst_postorder(BST* tree) {postorder(tree->root);printf("\n");
}
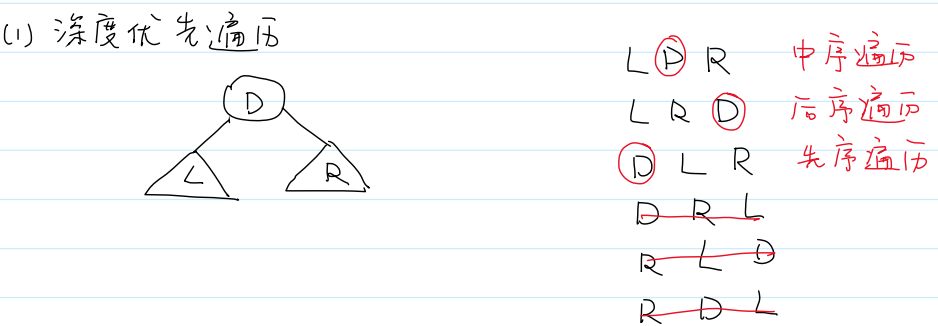
三个结点排列组合有6种遍历,但要求左先于右,故只剩3种
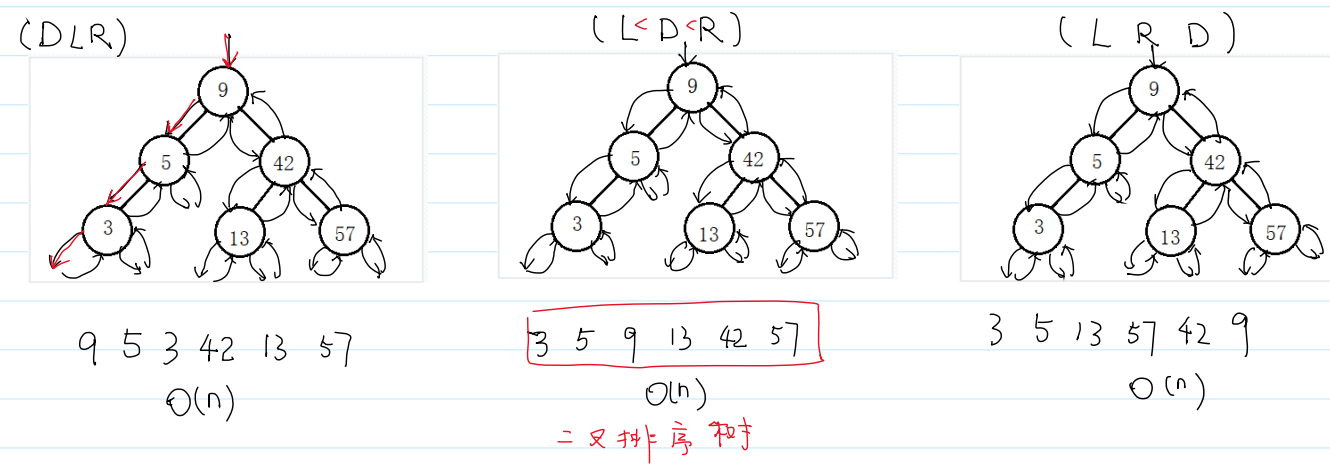
路径完全相同,只是访问顺序不同
2)广度优先遍历:
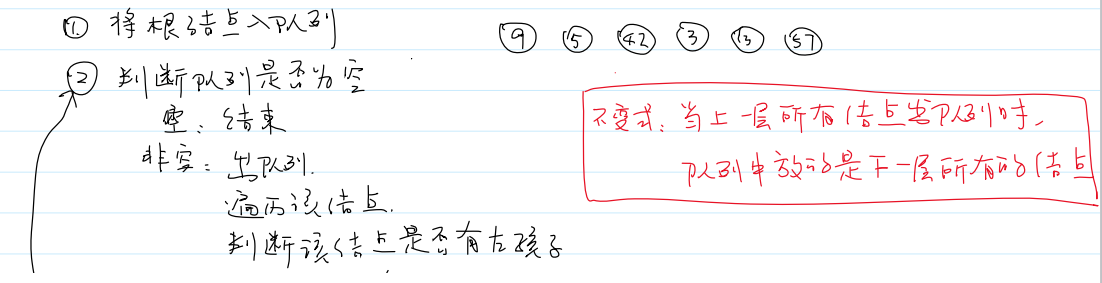
iv.层序遍历(层次遍历):需要队列,需要手动创建
1.步骤:
①申请并初始化结点
②根结点入队
③循环判断队列是否非空,若非空,队头结点出队,遍历该结点,若该结点有左孩子,则左孩子入队,若该结点有右孩子,则右孩子入队。

2.具体实现:
// 广度优先遍历:层次遍历
void bst_levelorder(BST* tree) {Queue* q = queue_create();queue_push(q, tree->root); //根结点入队列while (!queue_empty(q)) { //判断队列是否为空TreeNode* node = queue_pop(q); //队头结点出队并遍历printf("%d ", node->key);if (node->left) queue_push(q, node->left);if (node->right) queue_push(q, node->right);}
}
例题:层序遍历实现分层打印
思路1:记录当前层和下一层的结点数
//分层打印:实现1
void bst_levelorder_fenceng1(BST* tree) {Queue* q = queue_create();queue_push(q, tree->root);int cur_count = 1; //当前层的结点数目int next_count = 0;//下一层的结点数目while (!queue_empty(q)) {TreeNode* node = queue_pop(q);cur_count--;printf("%d ", node->key);if (node->left) {queue_push(q, node->left);next_count++;}if (node->right) {queue_push(q, node->right);next_count++;}//分层打印if (cur_count == 0) {printf("\n");cur_count = next_count;next_count = 0;}}printf("\n");
}
思路2:记录每层的结点数
void bst_levelorder_fenceng2(BST* tree) {Queue* q = queue_create();queue_push(q, tree->root);while (!queue_empty(q)) {int size = q->size; //记录当前层的结点数for (int i = 0; i < size; i++) {TreeNode* node = queue_pop(q);printf("%d ", node->key);if (node->left) {queue_push(q, node->left);}if (node->right) {queue_push(q, node->right);}}printf("\n");}printf("\n");
}
⑦销毁:destroy
1.后序遍历free
void destroy(TreeNode* root) { //后序遍历实现释放//边界条件if (root == NULL) {return;}//递归公式:左右根destroy(root->left);destroy(root->right);free(root); // 释放根节点
}//析构函数1:后序遍历
void bst_destroy(BST* tree) {//0.错误处理if (tree == NULL) {printf("tree == NULL, destroy failed.\n");return;} //1.释放树的结点【委托(外包)】 destroy(tree->root);//2.释放BST结构体free(tree);
}
2.层序遍历free
//析构函数2:层序遍历
void bst_destroy_2(BST* tree) {//容错处理if (!tree || !tree->root) return;//层序遍历Queue* queue = queue_create();queue_push(queue, tree->root); // 将根结点入队列while (!queue_empty(queue)) { // 判断队列是否为空 TreeNode* node = queue_pop(queue); // 出队列,销毁这个节点if (node->left) {queue_push(queue, node->left);}if (node->right) {queue_push(queue, node->right);}free(node); // 释放节点}free(tree); // 节点销毁
}
(4)BST性能分析
1.n个结点的BST树的高度为h,h的范围是[log₂n,n]
2.BST的效率:
①插入 insert:O(h)
②删除 delete:O(h)
③查找 search:O(h)
3.BST的优点/使用场景:①保证有序性 ②需要动态添加和删除元素
4.缺陷:不能保证O(logn)的时间复杂度的插入、删除、查找,最坏情况是单支树。因为总朝着一个方向进行操作(删右添左),性能会退化,缺少调平衡。因此引入了平衡二叉搜索树
5.对比有序数组的效率:
①增:O(n)
②删:O(n)
③查:O(logn)
④遍历:O(n)
有序数组的使用场景:①保证有序性 ②存储静态数据
(5)平衡二叉搜索树
①AVL树
AVL树平衡的定义:对任意一个结点,左子树和右子树的高度之差不超过1
定义严格,导致:①高度比较小 ②每次添加和删除时需要进行的调整较多
故 AVL树,查找效率高,添加和删除效率低于RBT
②红黑树 RBT
1.红黑树平衡的定义:整棵树的高度为O(logn)
定义比较宽松,导致:①高度比较高 ②每次添加和删除时需要进行的调整操作少
故 红黑树,添加和删除效率高,查找的效率低于AVL树。
在不断的实验中发现,红黑树的效率总体来说高于AVL树。故日常生产更多使用红黑树。
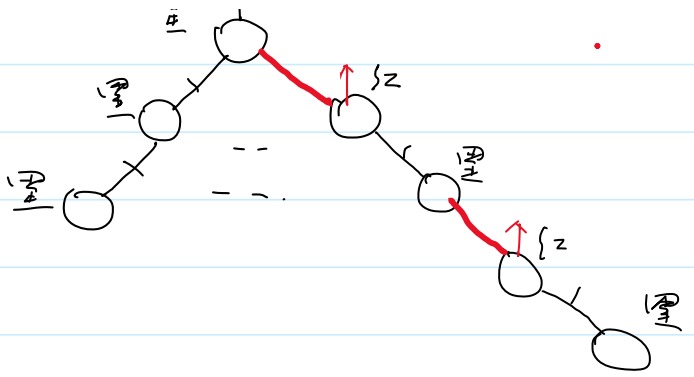
2.模型
提升,同一层的,类似原子间作用力
①3-结点有两种表示方式:提升最左边或者提升最右边
②4-结点只有一种表示方式,就是高度最低的这种,高度为2。其余高度为3的表示方式都是错的。即不能有两条连续的红色边


但边是逻辑结构,实际不存在,那么如何表示边的颜色呢?
可以考虑用结点来表示边的颜色。
那么用父结点还是孩子结点来表示边的颜色呢?
答案是用孩子结点来表示边的颜色。因为父结点对应两条边,孩子结点向上只有一条边。
黑高就是2-3-4树的高度
红黑树的高度最多是黑高的2倍。也是logn级别
3.基本操作 (和BST一样)
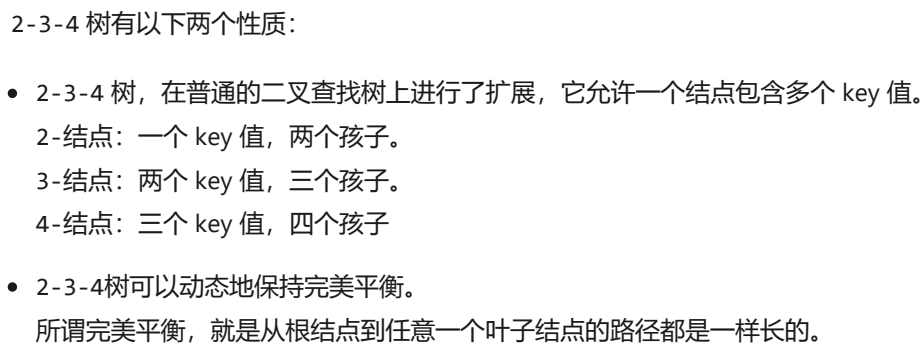
(5)B树
①2-3-4树 (四阶B树)
1.模型
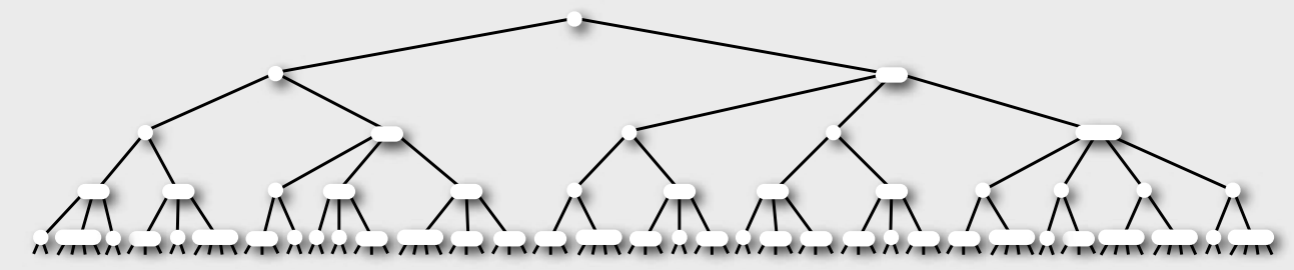
2.性质
①根节点分裂,树高才+1
②动态保持完美平衡
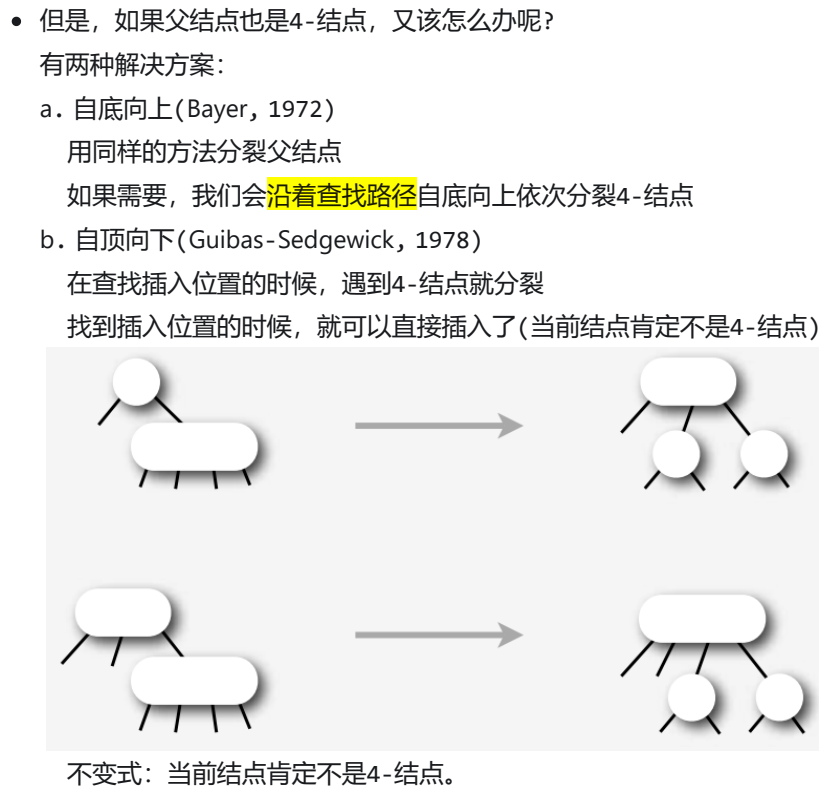
3.4-结点分裂
①自底向上(Bayer, 1972)
② 自顶向下(Guibas-Sedgewick, 1978):遇到4-结点就分裂,当前结点不是4-结点。
4.实现
红黑树是2-3-4树的具体实现,2-3-4树是一种模型
(6)二叉搜索树的应用
(7)代码缩进的层次越高,代码的复杂度就越高,可读性越差
循环的两个点:循环退出点、循环不变式
递归的两个核心点:边界条件、递归公式
(十二) 排序和二分查找
1.二分查找
1.前提:
①有序 :具有某种顺序,不一定非得是 从小到大或者从大到小,比如循环有序
②数组:随机查找。通过每次比较,可以丢掉几乎一半的区间。
2.性能:O(logn)
3.作用:
比起顺序查找,二分查找大量减少了比较操作 。
即使是比较小的数组,也可能因为存储的元素较大(长的字符串、大的集合),导致比较很慢。也可以用二分查找减少比较次数。
4.实现:2种实现 + 4种变式
(1)递归实现
//递归实现的子函数
int binarysearch_1(int arr[], int left, int right, int key) {//边界条件if (left > right) return -1;//递归公式//int mid = (left + right) / 2;int mid = left + (right-left)/2; //避免整数溢出 if (key < arr[mid]) { //目标值 < 中值 return binarysearch_1(arr, left, mid - 1, key); //往左走 } else if (key > arr[mid]) { //目标值 > 中值return binarysearch_1(arr, mid + 1, right, key); //往右走} else { //目标值 = 中值 return mid; //直接返回下标(索引)}
}//1.二分查找的递归实现:返回的是key的索引
int BinarySearch_1(int arr[], int n, int key) {//(1)数组不好递归,区间好递归 (2)封装,避免用户手动输入区间,丑陋的接口return binarysearch_1(arr, 0, n - 1, key); //闭区间: [0 , n-1]
}
(2)循环实现
//2.二分查找的循环实现
int BinarySearch_2(int arr[], int n, int key) {int left = 0, right = n - 1;while (left <= right) {//int mid = (left + right) / 2;int mid = left + (right-left >> 1); //避免整数溢出 if (key < arr[mid]) { //目标值 < 中间值right = mid - 1; //向左走} else if (key > arr[mid]) { //目标值 > 中间值left = mid + 1; //向右走} else { //目标值 = 中间值return mid; //返回中间值的索引}}return -1; //没找到,返回-1,表示 key 不存在
}
5.二分查找的4种变种
(1)查找第一个与key值相等的元素
//查找第一个和key值相等的元素
int BinarySearch_3(int arr[], int n, int key) {int left = 0, right = n - 1;while (left <= right) {//int mid = (left + right) / 2;int mid = left + (right-left >> 1); //避免整数溢出 if (key < arr[mid]) {right = mid - 1;} else if (key > arr[mid]) {left = mid + 1;} else { //相等,但是要找从左数第一个与key值相等的if(mid == left || arr[mid-1] < key) right = mid - 1; //区间向左缩小1}}return -1;
}
(2)查找最后一个与key值相等的元素
//4.查找最后一个和key值相等的元素
int BinarySearch_4(int arr[], int n, int key) {int left = 0, right = n - 1;while (left <= right) {int mid = left + (right-left >> 1); //避免整数溢出 if (key < arr[mid]) {right = mid - 1;}else if (key > arr[mid]) {left = mid + 1;}else { // key == arr[mid],但是要找从左数最后一个与key值相等的if (mid == right || key < arr[mid + 1] ) {return mid;}left = mid + 1; //区间向右缩小1}}return -1;
}
(3)查找第一个大于等于key值的元素
//5.查找第一个大于等于key值的元素:先向右找到比key大的,再逐步向左走找到第一个
int BinarySearch_5(int arr[], int n, int key) {int left = 0, right = n - 1;while (left <= right) {int mid = left + (right-left >> 1); //避免整数溢出 if (arr[mid] < key) {left = mid + 1;} else { // arr[mid] >= keyif (mid == left || arr[mid - 1] < key) {return mid;}right = mid - 1;}}return -1;
}
(4)查找最后一个小于等于key值的元素
//6.查找最后一个小于等于key值的元素:先向左找到比key小的,再逐步向右找到最后一个
int BinarySearch_6(int arr[], int n, int key) {int left = 0, right = n - 1;while (left <= right) {int mid = left + (right-left >> 1); //避免整数溢出 if (arr[mid] > key) {right = mid - 1; //向左} else { //arr[mid] <= keyif (mid == right || arr[mid+1] > key) {return mid;}left = mid + 1; //逐步向右}}return -1;
}
6.具体应用:IP地址归属地查询
2.排序算法分析
0.排序的目的,是方便查找
1.分析/评估算法的能力,比算法的实现更重要
2.如何分析一个排序算法:时间复杂度、空间复杂度、稳定性
(1)时间复杂度:
①最好情况:对应它的应用场景
②最坏情况:算法的下限
③平均情况:
④常数项和低阶项:
(2)空间复杂度:
我们需要重点关注原地排序(store in place),也就是空间复杂度为 O(1) 的排序。
(3)稳定性:
数据集中"相等"的元素,如果排序前和排序后的相对次序不变,那么这个排序算法
就是稳定的。稳定性是排序算法一个很重要的指标。
3.不同场景选择不同的排序算法 (没有最好的排序算法,只有最合适的排序算法)
3.选择排序
1.思路:
遍历从未排序的元素中,找到最小元素的下标,一趟结束找出最小,进行交换
共n-1趟。每趟重置 j = i+1
2.代码
void SelectionSort(int arr[], int n) {for (int i = 0; i < n-1; i++) {int min_index = i;for (int j = i+1; j < n ; j++) {if (arr[j] < arr[min_index]) {min_index = j;}}swap(&arr[min_index], &arr[i]);}print_array(arr, 10);
}
3.性能分析
(1)时间复杂度:O(n²)
比较次数:n-1 + n-2 + … = n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1) 。无论初始序列如何,一定会进行n-1趟简单选择排序。一定会比较 n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1) 次,但是交换次数很少
(2)空间复杂度:O(1)
(3)稳定性:选择排序是不稳定的,因为会发生长距离的交换。例如:
[2, 2', 1]
经过简单选择排序第一轮就变成了
[1, 2', 2] //2与2'的相对位置发生改变
4.冒泡排序
1.思路:
确定未排序区域。
2.优化:冒泡排序可以提前结束。如果本趟冒泡没有发现逆序对(未发生交换),则认为整个数组已经有序,可以直接结束。
3.实现
void BubbleSort(int arr[], int n) {for (int i = 0; i < n-1; i++) {for (int j = 0; j < n-1-i; j++) { //大值从前往后冒泡if (arr[j] > arr[j+1]) {swap(&arr[j], &arr[j+1]);}}//for (int j = n - 1; j > i; j--){ //小值从后往前冒泡// if (arr[j-1] > arr[j]) {// swap(&arr[j-1], &arr[j]);// }//}}print_array(arr, 10);
}
优化:冒泡排序可以提前结束:本趟冒泡没有发现逆序对
void swap(int* a,int* b){int temp = *a;*a = *b;*b = temp;
}void BubbleSort(int arr[],int n){for(int i = 0; i < n-1; i++){ //n-1趟bool isSwap = false; for(int j = n-1; j > i; j--){ //从后向前冒if(arr[j-1] > arr[j]){ //稳定的,仅交换逆序对swap(&arr[j-1], &arr[j]);isSwap = true;}}if(isSwap == false) return; //优化:某一趟排序未发生交换,冒泡排序可以提前结束}
}
4.性能分析
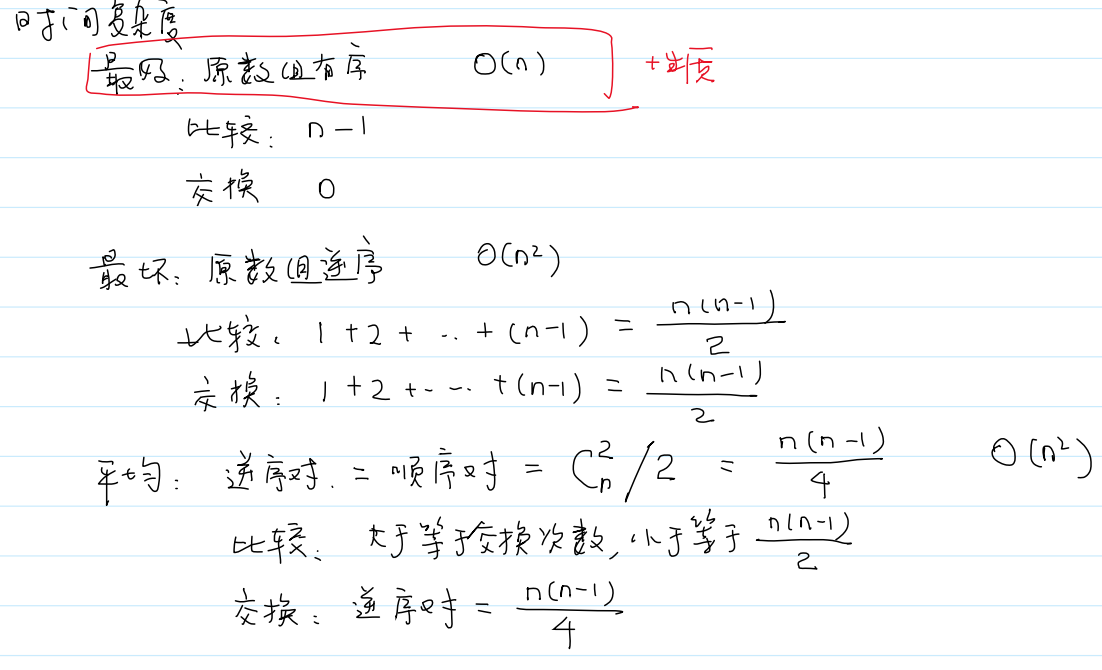
(1)时间复杂度:O(n²)
①最好情况:原数组有序, O(n)
比较次数:n-1
交换次数:0
②最坏情况:原数组逆序, O(n²)
比较次数:(n-1) + (n-2) + … + 1 = n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1)
交换次数:(n-1) + (n-2) + … + 1 = n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1)
③平均情况:O(n²)
比较次数:大于等于交换的次数,小于等于 n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1)
交换次数:n(n-1)/4 (等于逆序对的个数)
冒泡和插入排序的分析方法一致,性质一模一样。三种情况的时间复杂度相同。
但常数项不同,插入排序的交换仅1次赋值(没有用到swap函数),而冒泡排序的交换要4次赋值,故同一个O复杂度下,插入排序效率更高。
(2)空间复杂度:O(1)
(3)稳定性:冒泡排序是稳定的,因为只有相邻的逆序对才进行交换,遍历整个未排序区域,将逆序对降低为0
5.插入排序
插入排序(Insertion sort)
1.思路:前半部分是手牌,后半部分是无序的牌堆。从牌堆拿起一张,从手牌最大开始比较,找到第一个小于等于value的元素,插入到它的后面。
插入排序,是从后往前遍历已有序的区域,从有序区域的最后一个开始往前遍历
2.实现
void InsertionSort(int arr[], int n) {for (int i = 1; i < n; i++) {int insertval = arr[i];int j = i - 1; //从后往前遍历有序区域,从有序区域的最后一个开始while (j >= 0 && arr[j] > insertval) {arr[j + 1] = arr[j]; //元素右移j--;}arr[j + 1] = insertval;}print_array(arr, 10);
}
3.性能分析
(1)时间复杂度:
①最好情况:原数组有序
比较n-1次,交换0次
时间复杂度为O(n)
插入排序,基本有序的数组时间复杂度最低,为O(n)。甚至快过快速排序等。排序 至少需要遍历一遍数组,O(n)的时间复杂度就是最低的了。
②最坏情况:原数组逆序
比较 1+2+3+…+n-1 = n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1) 次,交换 1+2+3+…+n-1 = n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1) 次
时间复杂度为O(n²)
③平均情况:O(n²)
(2)空间复杂度:O(1),原地排序
(3)稳定性:
插入排序是稳定的,因为只交换相邻的逆序对,能保证原来的顺序。
4.使用场景
当数组满足:
①数组长度较小
②原数组基本有序(元素离最终位置相差不远)
插入排序可以达到O(n)的时间复杂度。
插入排序在对几乎已经排好序的数据排序时,效率很高,可以达到线性排序的效率。
6.希尔排序
1.历史地位:希尔排序是第一个时间复杂度低于O(n²)的排序算法
2.思想:
希尔排序,又叫缩小增量排序。
①多人抓牌,每个人手牌有序。人数由多到少
②倒数第二次时,gap = 2,任意元素离最终位置的距离都<2,此时数组已经基本有序。
③最后一次希尔排序gap为1,退化为插入排序。
④减到0结束排序。
减少了长距离一步步交换,减少了移动的次数。长距离交换使得小数可以快速达到最终位置。
希尔排序的效率与 gap 序列相关,希尔本人推荐的 gap 序列为:n/2, n/4, …, 1。
但这个序列并不是最佳的( ╯□╰ )…
3.实现
gap个人轮流抓牌。
加个while循环,所有的1改成gap。
void ShellSort(int arr[], int n) {int gap = n / 2;while (gap != 0) {//组间插入排序for (int i = gap; i < n; i++) {int insertval = arr[i];int j = i - gap; //遍历有序区域while (j >= 0 && arr[j] > insertval) {arr[j + gap] = arr[j];j -= gap;}arr[j + gap] = insertval;}gap /= 2;}print_array(arr, 10);
}
4.设计的思考:
利用了插入排序的优点( 基本有序时为O(n) ),避免了插入排序的缺点 (元素较小的元素需要长途跋涉的比较才能到达前面。希尔排序设计了长距离交换,使得移动减少。)
5.效率分析:
(1)时间复杂度:和gap序列有关,整体<O(n²)
(2)空间复杂度:O(1)
(3)稳定性:不稳定
长距离交换可能导致同值的相对位置发生改变
6.比较
希尔排序,相比插入排序:牺牲了稳定性,换取了时间
7.归并排序
(1)分治思想
1.分治思想:

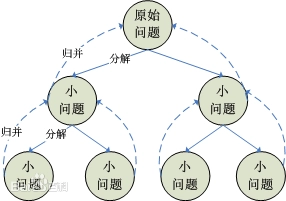
2.分治与递归的关系
①分治思想:算法设计思想
②递归:一种代码实现方式
关系:不同维度的东西,分治的思想一般用递归来实现
3.分治思想的应用:
二分查找、归并、快速排序、矩阵相乘
(2)合并操作:Merge()
1.过程
递归图:
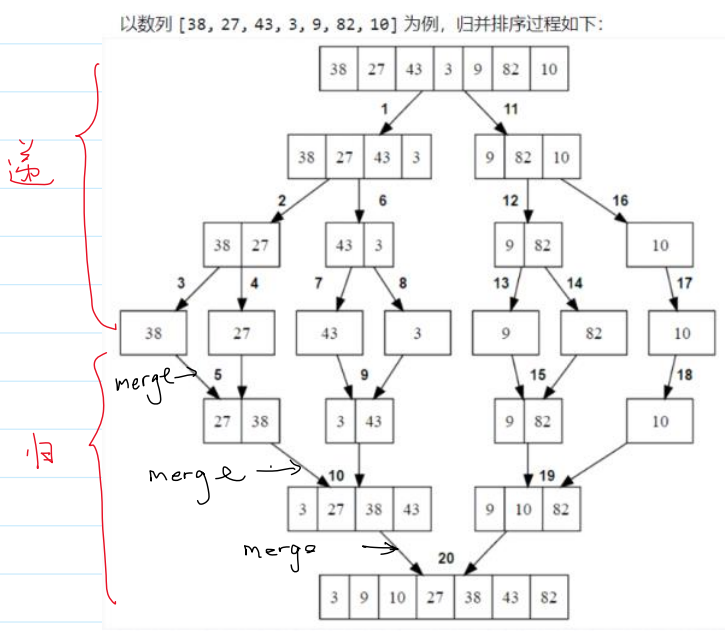
2.实现
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include <stdlib.h>
#define N 10void print_array(int arr[], int n) {for (int i = 0; i < n; i++) {printf("%d ", arr[i]);}printf("\n");
}int temp[N];void Merge(int arr[], int left, int mid, int right) {int i = left, j = mid + 1, k = left;//复制for (i = left; i <= right; i++) temp[i] = arr[i];while (i <= mid && j <= right) {if (temp[i] <= temp[j]) {arr[k++] = temp[i++];}else {arr[k++] = temp[j++];}}while (i <= mid) arr[k++] = temp[i++];while (j <= right) arr[k++] = temp[j++];
}void MergeSort(int arr[], int left, int right) {//边界条件if (left >= right) return;//递归公式int mid = left + (right - left >> 1);MergeSort(arr, left, mid);MergeSort(arr, mid + 1, right);Merge(arr, left, mid, right);
}void merge_sort(int arr[], int n) {MergeSort(arr, 0, n - 1);
}int main(void) {int arr[] = { 10,9,8,7,6,5,4,3,2,1 };merge_sort(arr, N);print_array(arr, N);return 0;
}
3.性能分析
(1)时间复杂度:
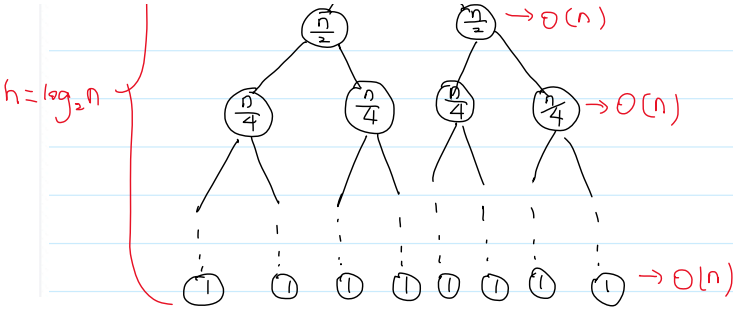
归并排序对排序不敏感,任何情况下时间复杂度都是O(nlogn)
分析:使用递归树,来分析递归程序的时间复杂度
数组长度为n,Merge()是O(n)
递归树深度是log₂n
T(n) = log₂n·O(n) = log₂n·cn = O(nlog₂n) = O(nlogn)
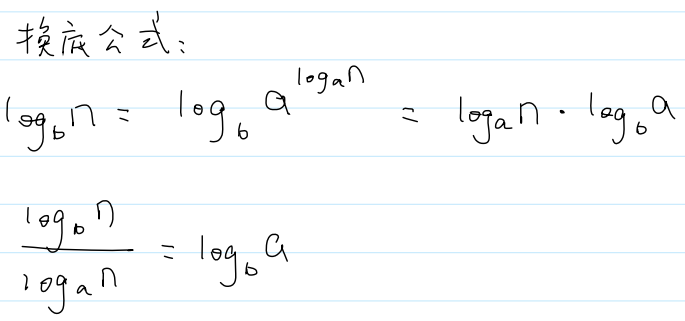
大O表示法不关心底是多少,因为有换底公式
(2)空间复杂度:
递归调用栈O(logn) + 辅助数组O(n) = O(n)
归并排序的空间复杂度太高了,内存消耗很大,不能用于大数组的排序
空间复杂度高是归并排序比较显著的缺陷。
(3)稳定性:
稳定的。arr[i] <= arr[j]
8.快速排序
1.快速排序(Quick sort)是建立在分区操作上的一种高效的排序算法。快速排序也是分治思想的一种典型应用。
2.算法步骤
分区操作 Partition
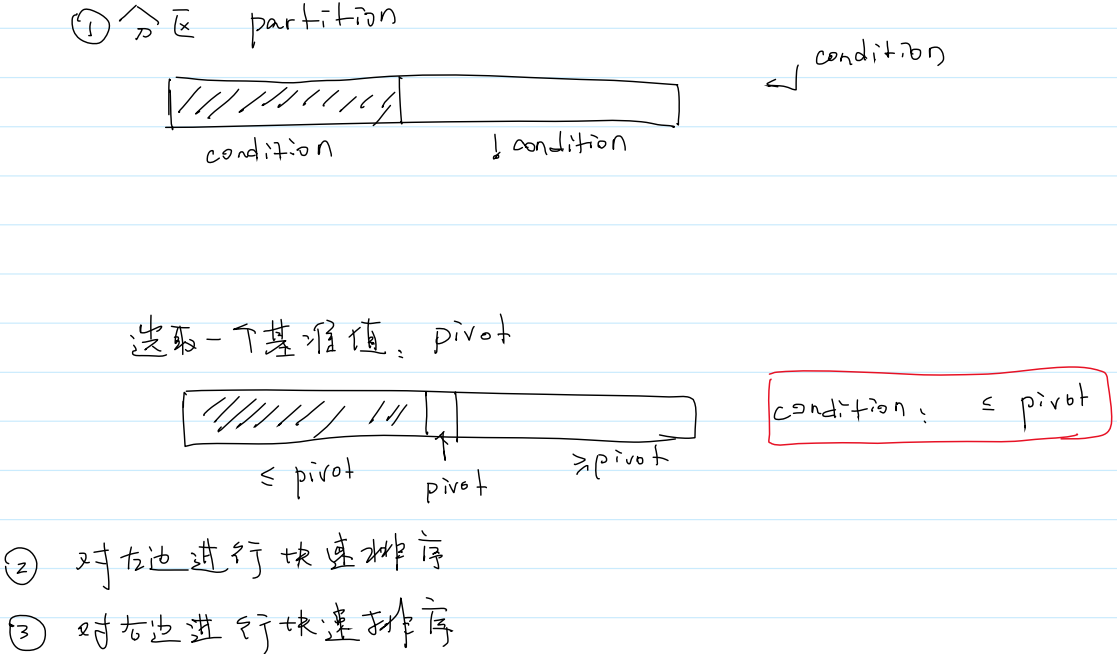
3.实现
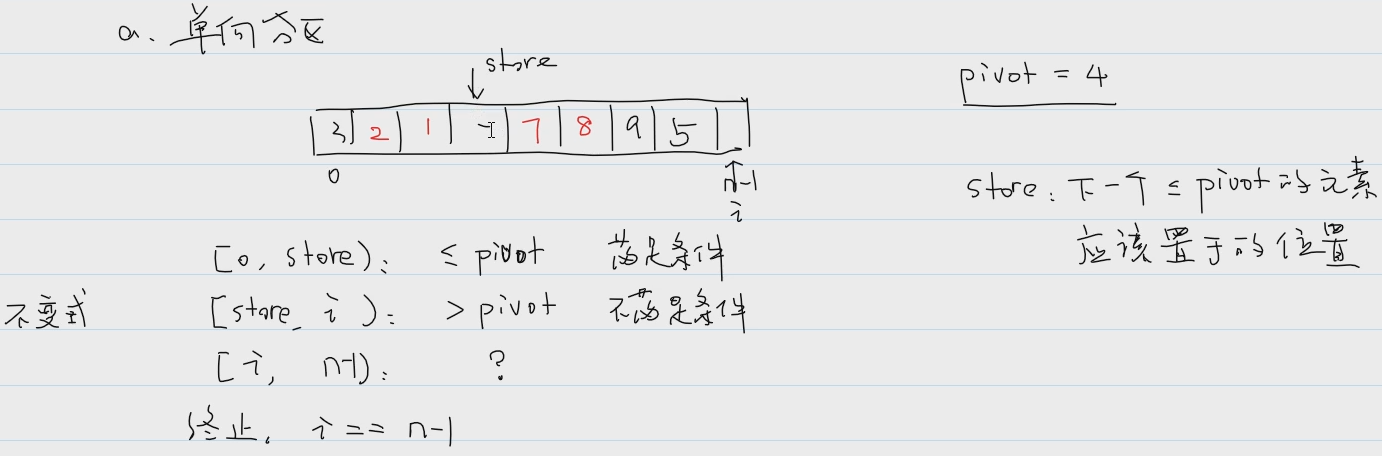
(1)如何分区
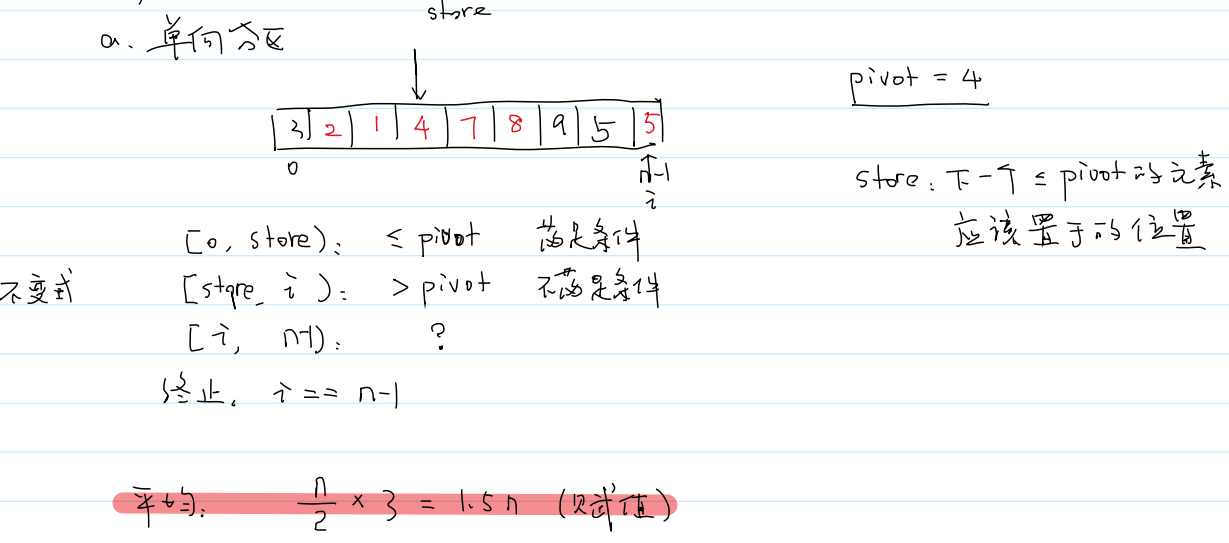
①单向分区
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include <time.h>#define SIZE(a) (sizeof(a)/sizeof(a[0]))
#define SWAP(arr, i, j){ \int t = arr[i]; \arr[i] = arr[j]; \arr[j] = t; \
}void print_array(int arr[], int n) {for (int i = 0; i < n; i++) {printf("%d ", arr[i]);}printf("\n");
}//花生讲义的单向分区(单向扫描算法)
int partition(int arr[], int left, int right) {// 选取基准值,并将基准值放到最右边int idx = rand() % (right - left + 1) + left;int pivot = arr[idx];SWAP(arr, idx, right);// 分区操作int storeIdx = left;for (int i = left; i < right; i++) {if (arr[i] < pivot) {SWAP(arr, storeIdx, i);storeIdx++;}}SWAP(arr, storeIdx, right);// 返回基准值最终所在的索引return storeIdx;
}void quick_sort_helper(int arr[], int left, int right) {// 边界条件if (left >= right) return;// 递归公式int idx = partition(arr, left, right);quick_sort_helper(arr, left, idx - 1);quick_sort_helper(arr, idx + 1, right);
}void quick_sort(int arr[], int n) {srand(time(NULL));quick_sort_helper(arr, 0, n - 1);
}int main(void) {int arr[] = { 5,4,3,2,1 };quick_sort(arr, 5);print_array(arr, 5);return 0;
}
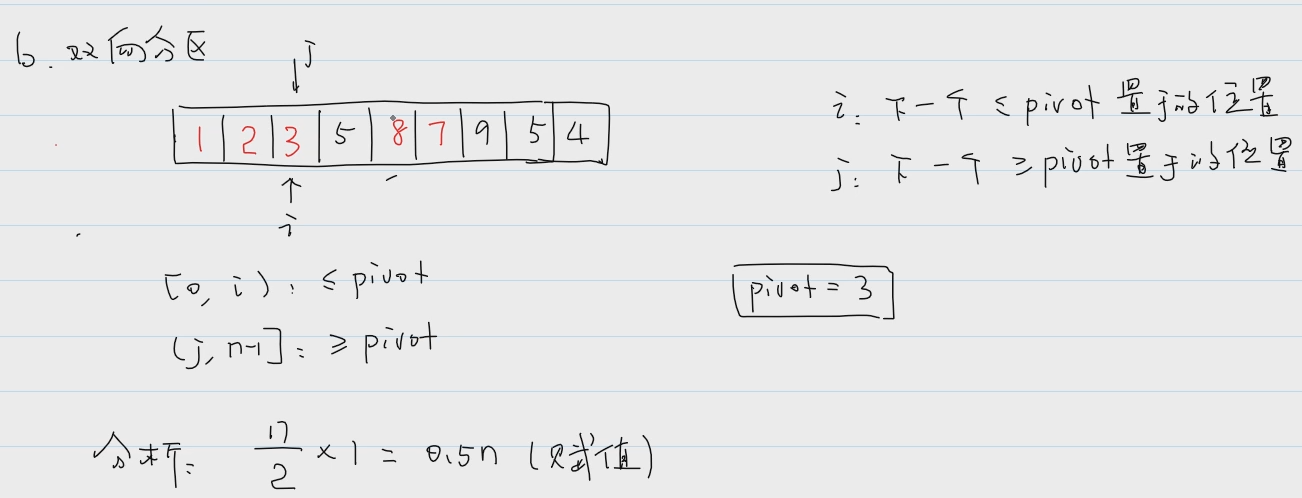
②双向分区:
考研,划分左右区间。性能最好。
左右两根指针,向中间移动,相遇点即为pivot的位置
//双向分区(双向扫描)
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#define SIZE(a) (sizeof(a)/sizeof(a[0]))void print_array(int arr[], int n) {for (int i = 0; i < n; i++) {printf("%d ", arr[i]);}printf("\n");
}int Partition(int arr[], int left, int right) {//选取基准值int pivot = arr[left];//双向分区int i = left, j = right;while (i < j) {//先移动j,找<pivot的元素while (i < j && arr[j] >= pivot) {j--;} // i == j || arr[j] < pivotarr[i] = arr[j];//再移动i,找>pivot的元素while (i < j && arr[i] <= pivot) {i++;} // i == j || arr[i] > pivotarr[j] = arr[i];} // i == jarr[i] = pivot;return i;
}void QuickSort(int arr[], int left, int right) {//边界条件if (left >= right) return;//递归公式int idx = Partition(arr, left, right);print_array(arr, 5);QuickSort(arr, left, idx-1);QuickSort(arr, idx+1, right);
}void quick_sort(int arr[], int n) {//委托的原因:(1)数组不好递归,区间好递归//(2)丑陋的内部设计要封装起来,只暴露一个简单易用的接口给用户QuickSort(arr, 0, n - 1);
}int main(void) {int arr[] = { 5,4,3,2,1 };quick_sort(arr, SIZE(arr));return 0;
}
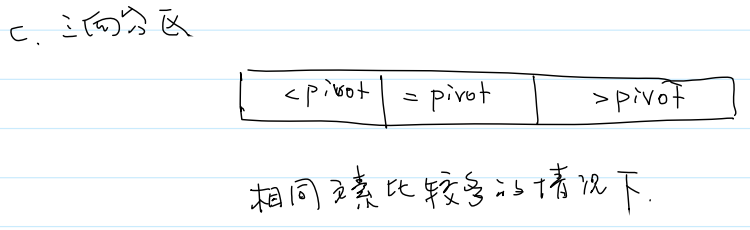
③三向分区:
应用场景:相同元素比较多的情况下
一般情况下三向分区性能弱于单向分区和双向分区,但在相同元素较多时三向分区算法性能较高。
极端情况,当数组元素全部相同时,三向分区算法一次就能结束。
4.性能分析
(1)时间复杂度:
①最好情况:
每次分区,基准值恰好位于中间,每次分区都可以分为大小相等的两份
T(n) = O(n) + T( n 2 \frac{n}{2} 2n) + T( n 2 \frac{n}{2} 2n) = 2T( n 2 \frac{n}{2} 2n)+O(n) = O(nlogn)
②最坏情况:
每次分区,基准值都位于两端
T(n) = O(n) + T(n-1) = cn + T(n-1) = cn + c(n-1) + T(n-2) = c[n+ n-1 + n-2 + … + 1] = c n ⋅ ( n − 1 ) 2 c\frac{n·(n-1)}{2} c2n⋅(n−1)= O(n²)
③平均情况:
假设每次分区,都划分成9:1的区间
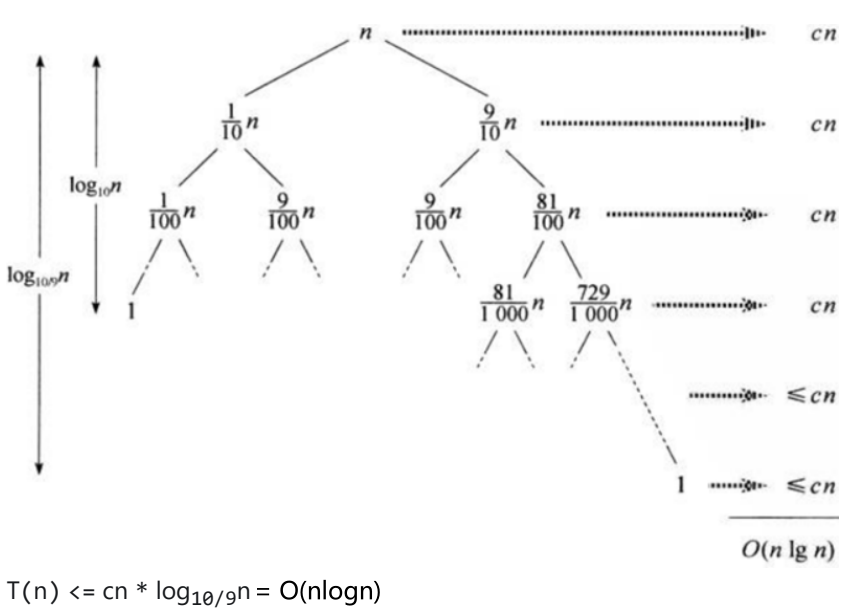
(2)空间复杂度:O(logn)
平均情况下,栈的深度为 O(logn)。
大O表示法,是表示增长趋势,并不是实际大小。O(logn)的实际内存大小,并不一定会大于O(1),因为常数项可能很大。
(3)稳定性:不稳定
在分区操作中,选取基准值后,我们会将其和最右边的元素进行交换。这可能是一
次长距离的交换,因此快速排序是不稳定的。
5.快排的优化 (改进策略):
(1)选取合适的基准值:
①随机选取
②选取3到5个元素,选取其中位数
(2)当子区间长度小于等于某个值(≤32,≤64)时,改用插入排序
(3)分区算法:
当区间中相同元素较多时,改用三向分区

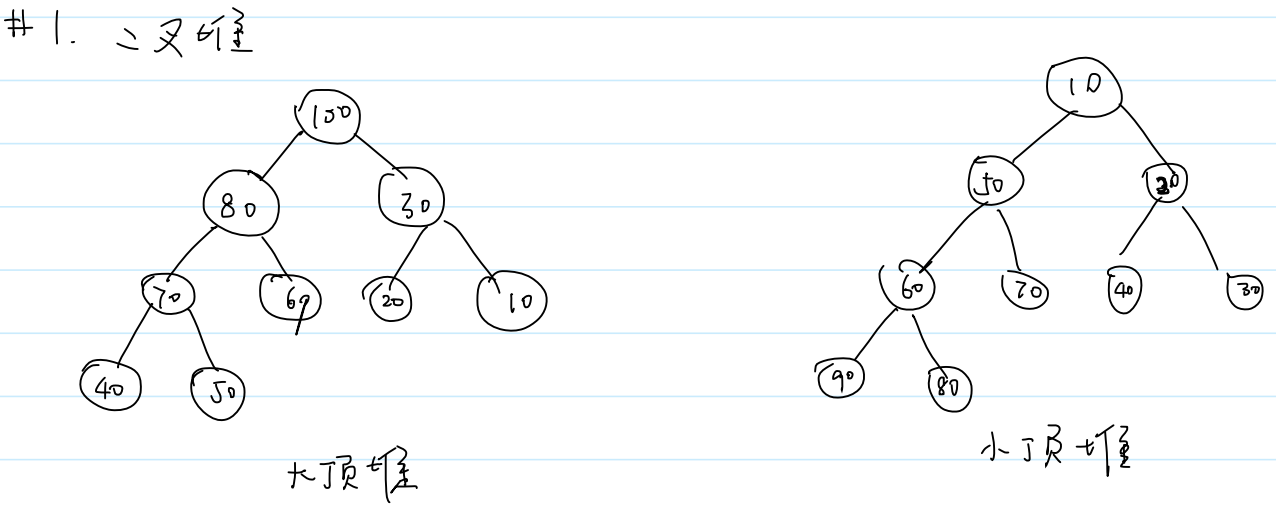
9.堆排序
1.二叉堆
(1)大顶堆 (大根堆)
根结点是最大值,左右子树也是大顶堆
(2)小顶堆 (小根堆)
根结点是最小值,左右子树也是小顶堆
2.算法步骤
(1)构建大顶堆
(2)初始化无序区长度 len = n
(3)交换堆顶元素和无序区的最后一个元素,无序区的长度len–。
(4)重新调整成大顶堆,即根结点下坠。重复,直至len == 1。
3.实现:大顶堆
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>#define SWAP(arr, i ,j){ \int temp = arr[i]; \arr[i] = arr[j]; \arr[j] = temp; \
}void print_array(int arr[], int n) {for (int i = 0; i < n; i++) {printf("%d ", arr[i]);}printf("\n");
}//i:需要调整的结点索引
//n:索引的最大范围
void heapify(int arr[], int i, int n) {while (i < n) {//求三个元素的最大值int lchild = 2 * i + 1;int rchild = 2 * i + 2;int maxIdx = i;if (lchild < n && arr[lchild] > arr[maxIdx]) {maxIdx = lchild;}if (rchild < n && arr[rchild] > arr[maxIdx]) {maxIdx = rchild;}if (maxIdx == i) break; //如果最大值是根结点,调整提前结束 SWAP(arr, i, maxIdx); //如果不是,交换根结点和最大值结点i = maxIdx; //继续下坠} //i >= n || maxIdx == i
}void build_heap(int arr[], int n) {//找到第一个非叶子结点i: lchild(i) = 2i+1 < n,2i+1 <= n-1, 2i <= n-2, i <= n/2 - 1//从后往前依次构建大顶堆for (int i = n / 2 - 1; i >= 0; i--) {heapify(arr, i, n);}
}void heap_sort(int arr[], int n) {//1.构建大顶堆build_heap(arr, n);//2.初始化无序区的长度int len = n;//3.交换堆顶元素和无序区最后一个元素,直到 len == 1while (len > 1) {SWAP(arr, 0, len-1);len--;heapify(arr, 0, len);} //len == 1
}int main(void) {int arr[] = { 9, 8, 7, 6, 5, 4, 3, 2, 1, 0};heap_sort(arr, 10);print_array(arr, 10);return 0;
}
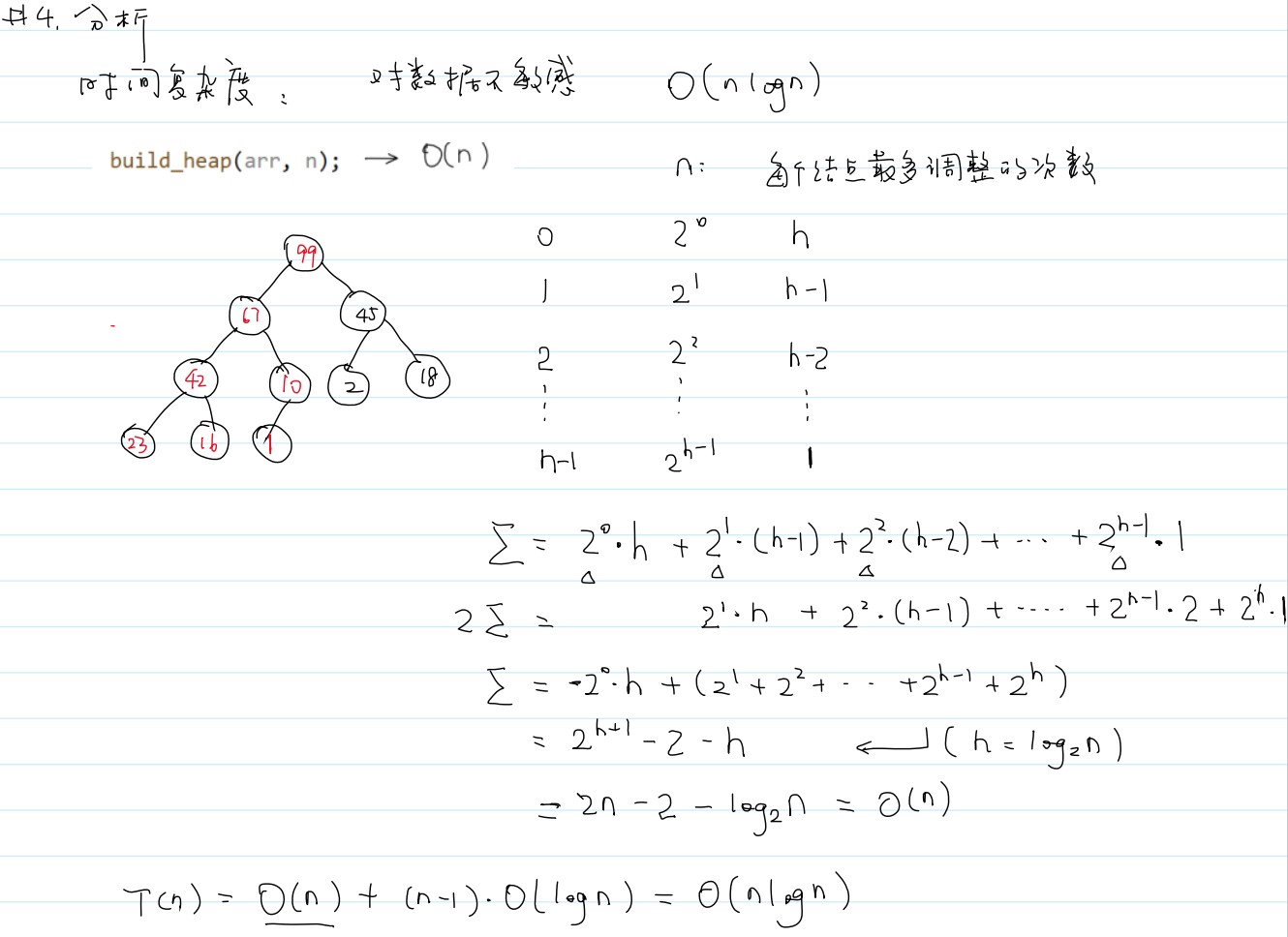
4.性能分析
(1)时间复杂度:堆排序对数据不敏感,任意情况下均为O(nlogn)
①构建大顶堆 build_heap():O(n)
②调整堆:(n-1) * logn = O(nlogn)
(2)空间复杂度:O(1)
【没有递归,也没有额外使用数组】
(3)稳定性:
不稳定。父结点与子结点交换,在数组里是远距离交换
归并排序 vs 堆排序:
共同点:都对数据不敏感,时间复杂度都是O(nlogn)
不同点:归并排序空间复杂度O(n),但稳定;堆排序空间复杂度O(1),但不稳定。
10.如何设计一个通用的排序算法
出租车很快,但有时候可能堵车
地铁比较稳定,就像堆排序对数据不敏感
洗牌算法:随机打乱数组
完整代码:
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include <time.h>#define SIZE(a) (sizeof(a)/sizeof(a[0]))
#define SWAP(arr, i ,j){ \int temp = arr[i]; \arr[i] = arr[j]; \arr[j] = temp; \
}void print_array(int arr[], int n) {for (int i = 0; i < n; i++) {printf("%d ", arr[i]);}printf("\n");
}//洗牌,随机打乱 【Fisher-Yates洗牌算法】
void shuffle(int arr[], int n) {srand(time(NULL)); // 初始化随机数生成器for (int i = 0; i < n - 1; i++) {// [i, n-1]int j = rand() % (n - i) + i;SWAP(arr, i, j);}
}int main(void) {int arr[] = { 0,1,2,3,4,5,6,7,8,9 };shuffle(arr, SIZE(arr));print_array(arr, SIZE(arr));return 0;
}
相关文章:
C++(week3):数据结构与算法
文章目录 (十一) 常用数据结构1.动态数组(1)模型(2).h与.c(3)实现 2.链表(1)模型(2)分类(3)基本操作(API)(4)实现(5)链表常见面试题(6)空间与时间 3.栈(1)模型(2)基本操作(3)实现(4)栈的应用 4.队列(1)模型(2)基本操作(API)(3)实现(4)队列的应用 5.哈希表(1)哈希表的提出原因(2…...
✅HTTPS和HTTP的区别是什么?
一、问题解析 HTTP和HTTPS是两种协议,分别是Hypertext Transfer Protocol和HyperText Transfer Protocol Secure。 HTTPS还经常被称之为HTTP over SSL或者HTTP over TSL,HTTPS经由HTTP进行通信,但利用SSL/TLS来加密数据包。 他们的区别主要…...

AIGC、LLM 加持下的地图特征笔记内容生产系统架构设计
文章目录 背景构建自动化内容生产平台系统架构设计架构详细设计流程介绍笔记来源笔记抓取干预 笔记 AIGC 赋能笔记 Rule 改写笔记特征库构建 附录Bash Cron 定时任务Golang 与 Pyhon AIGC 实践 小结 背景 在大模型的浪潮下,ChatGPT、Sora、Gemini、文言一心 等新技…...
快速入门go语言学习笔记
文章目录 1、初识go1.1、go语言1.2 第一个Go程序 2、基础类型2.1、命名2.2、变量2.2.1 变量声明2.2.2 变量初始化2.2.3 变量赋值2.2.4 匿名变量 2.3、常量2.3.1 字面常量(常量值)2.3.2 常量定义2.3.3 iota枚举 2.4、基础数据类型2.4.1 分类2.4.2 布尔类型2.4.3 整型2.4.4 浮点型…...
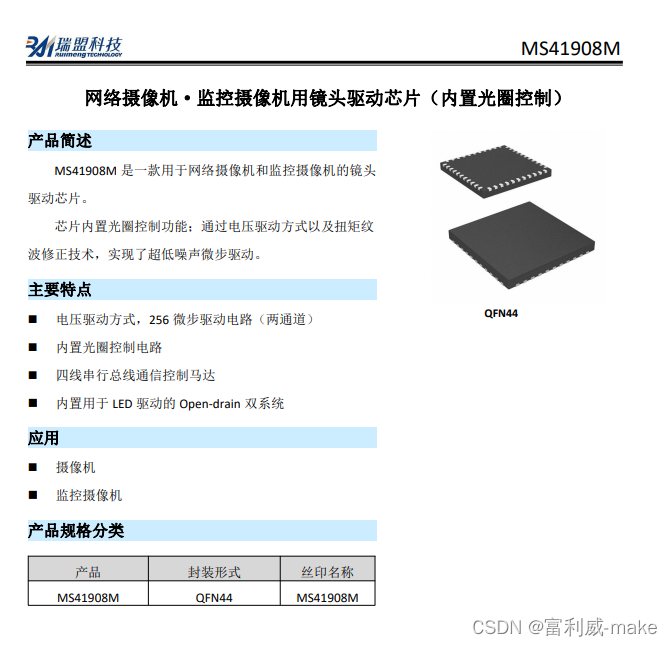
MS41908M替代AN41908
产品简述 MS41908M 是一款用于网络摄像机和监控摄像机的镜头 驱动芯片他可完全替代AN41908。 芯片内置光圈控制功能;通过电压驱动方式以及扭矩纹 波修正技术,实现了噪声微步驱动。 主要特点 电压驱动方式,256 微步驱动电路(两通道…...
---排序(去重/复制到新数组))
Lc33---- 414. 第三大的数(java版)---排序(去重/复制到新数组)
1.题目描述 给你一个非空数组,返回此数组中 第三大的数 。如果不存在,则返回数组中最大的数。 示例 1: 输入:[3, 2, 1] 输出:1 解释:第三大的数是 1 。 示例 2: 输入:[1, 2] 输出…...
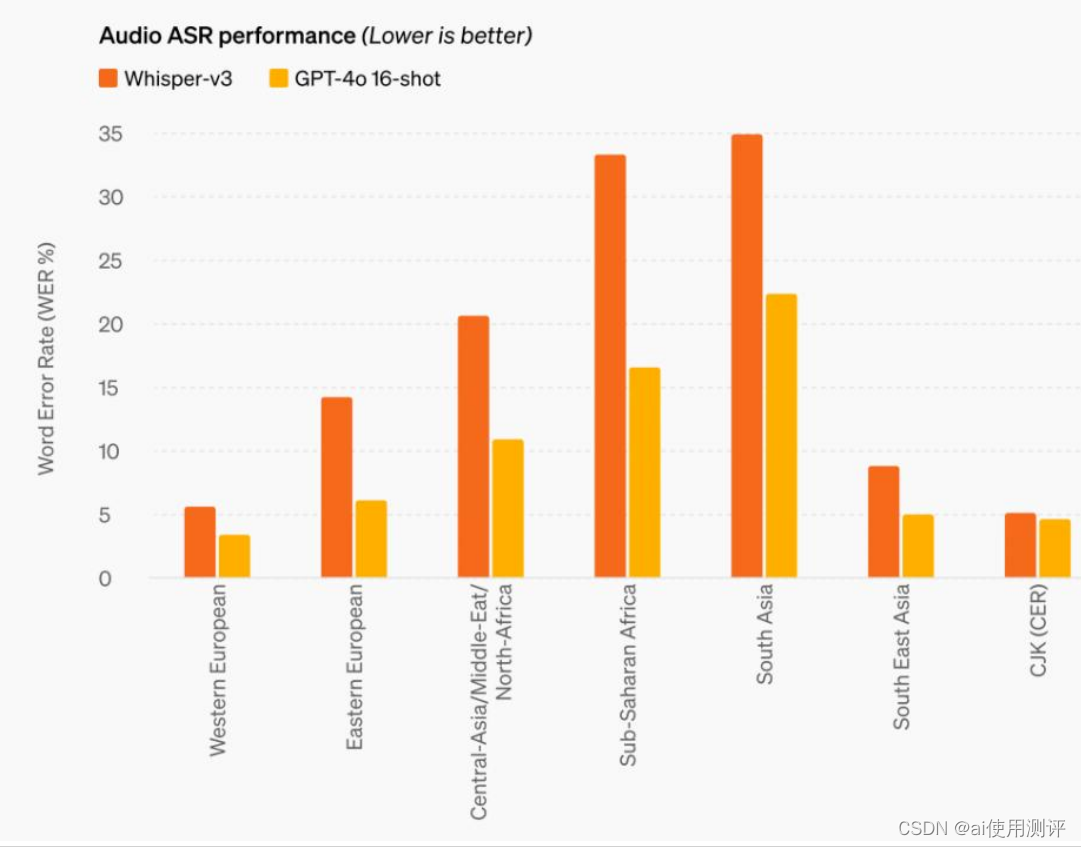
OpenAI新模型GPT-4o“炸裂登场” 响应速度堪比真人 关键还免费!
GPT-4o模型基于来自互联网的大量数据进行训练,更擅长处理文本和音频,并且支持50种语言。更值得一提的是,GPT-4o最快可以在232毫秒的时间内响应音频输入,几乎达到了人类的响应水平。 GPT-4o有多“炸裂”?核心能力有三 G…...
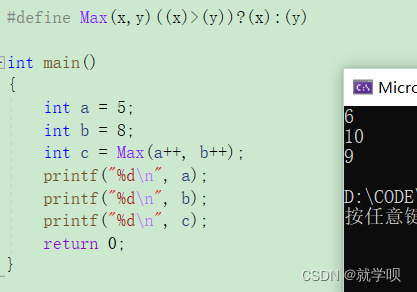
C语言收尾 预处理相关知识
一. 预处理详解 1.1 预定义符号 FILE //进行编译的源文件LINE //文件当前的行号DATE //文件被编译的日期TIME //文件被编译的时间FUNCTION //文件当前所在的函数STDC //如果编译器遵循ANSI C标准,其值为1,否则未定义 这些预定义符号都是语言内置的 我们…...
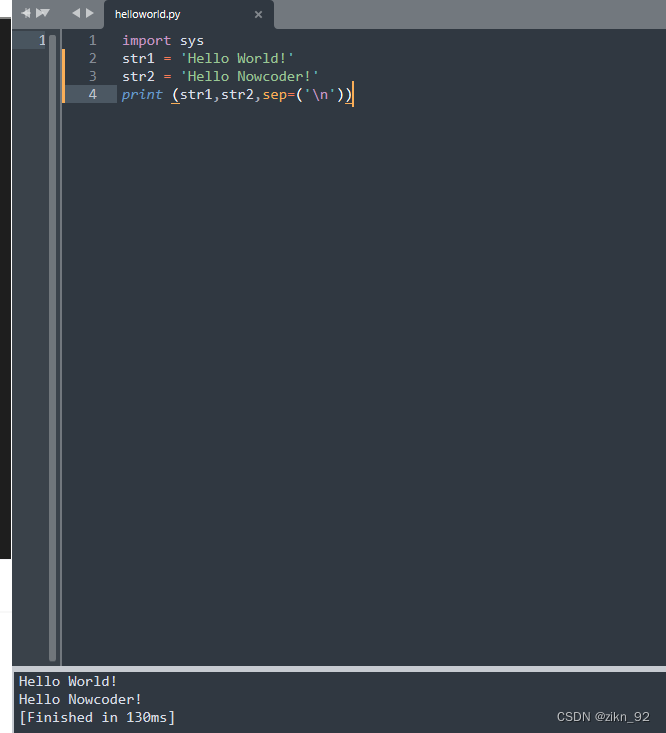
Python代码:二、多行输出
1、题目 将字符串 Hello World! 存储到变量str1中,再将字符串 Hello Nowcoder! 存储到变量str2中,再使用print语句将其打印出来(一行一个变量)。 2、代码 import sys str1 Hello World! str2 Hello Nowcoder! print (str1,st…...

前端内嵌iframe网页单点登录的三种方式
背景:我们开发中会遇到让内嵌的iframe进行登录,但是有希望是单点登录,不想多次登录 目录 方法一:共享sessionStorage或localStorage 方法二:设置内嵌iframe的url参数 方法三:通过父子页面通信postMessage…...

Git篇——Git提交指定文件编码
背景:项目中有些老工程的代码编码格式不统一,可以通过以下方式强行指定提交时的文件编码,可以将所有上传到git的文件的编码格式统一。 在Git中,可以通过设置.gitattributes文件来指定文件编码。在项目根目录下创建一个名为.gitat…...

在云服务器上运行StyleGAN3生成伪样本
首先是传入数据,这里我们不做赘述。 对于数据格式的裁剪,可以通过以下代码进行: from glob import glob from PIL import Image import os from tqdm import tqdm from tqdm.std import trangeimg_path glob(r"C:\Users\Administrato…...
:命令与信号)
学习Nginx(三):命令与信号
命令及选项 1. 显示帮助信息: [rootRockyLinux9 ~]# nginx -h nginx version: nginx/1.26.0 Usage: nginx [-?hvVtTq] [-s signal] [-p prefix][-e filename] [-c filename] [-g directives]选项:-?,-h : 显示帮助信息-v : 显示版本信息-V …...

软信天成:业务流程管理驱动企业数字化转型
近日,在国家发展改革委办公厅、国家数据局综合司联合印发的《数字经济2024年工作要点》中,明确强调了本年度大力推进重点领域数字化转型,营造数字化转型生态的战略举措,标志着国家对于企业数字化转型的高度重视与积极倡导。 企业…...

「Python绘图」绘制同心圆
python 绘制同心圆 一、预期结果 二、核心代码 import turtle print("开始绘制同心圆") # 创建Turtle对象 pen turtle.Turtle() pen.shape("turtle") # 移动画笔到居中位置 pen.pensize(2) #设置外花边的大小 # 设置填充颜色 pen.fillcolor("green&…...

Unity基础
概述 基础知识 3D教学 数学计算公共类Mathf 练习: 三角函数 练习: Unity中的坐标系 Vector3向量 向量模长和单位向量 向量加减乘除 练习: 向量点乘 向量叉乘 向量插值运算 Quaternion四元数 为何要使用四元数 四元数是什么 四元数常用方法 四元数计算 练…...

OpenHarmony 实战开发——ArkUI canvas组件
canvas 是 ArkUI 开发框架里的画布组件,常用于自定义绘制图形。因为其轻量、灵活、高效等优点,被广泛应用于 UI 界面开发中。本期,我们将为大家介绍 ArkUI 开发框架中 canvas 组件的使用。 一、canvas 介绍 1.1 什么是 canvas? …...

js积累一(ipv4正则校验+弹窗方式)
1. ipv4地址,点分十进制的校验 var regexIP /^((25[0-5]|2[0-4]\d|((1\d{2})|([1-9]?\d)))\.){3}(25[0-5]|2[0-4]\d|((1\d{2})|([1-9]?\d)))$/; if(strRegex.test(ip)) //true: 通过 2. 三种弹窗方式: alert();confirm(); prompt() 1&a…...
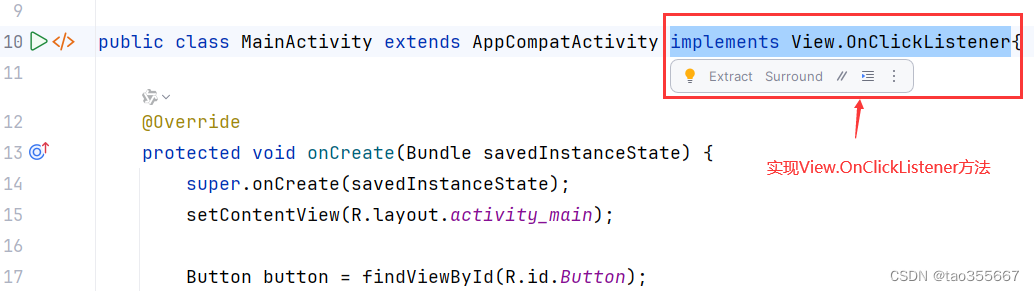
【Android】重写onClick方法时,显示Method does not override method from its supperclass
问题 重写onClick方法时,显示Method does not override method from its supperclass 解决 在类上加implements View.OnClickListener...

LeetCode 第397场周赛个人题解
目录 100296. 两个字符串的排列差 原题链接 思路分析 AC代码 100274. 从魔法师身上吸取的最大能量 原题链接 思路分析 AC代码 100281. 矩阵中的最大得分 原题链接 思路分析 AC代码 100312. 找出分数最低的排列 原题链接 思路分析 AC代码 100296. 两个字符串的排…...

FUTURE POLICE语音模型Agent智能体开发:多轮语音对话任务规划
FUTURE POLICE语音模型Agent智能体开发:多轮语音对话任务规划 想象一下,你对着手机说:“帮我订一张下周五从北京飞往上海,下午出发的机票,要经济舱。” 几秒钟后,手机用自然的人声回复你:“好的…...

一、BLE入门:从广播信道到报文解析,构建无线连接基石
1. BLE技术入门:无线世界的敲门砖 第一次接触BLE技术时,我完全被那些专业术语搞懵了。什么广播信道、报文解析,听起来就像天书一样。但当我真正动手调试一个智能手环项目后,才发现BLE其实就像两个人在嘈杂的教室里传纸条——需要…...

巴旦木脱青皮的设计【solidworks三维、cad图纸、论文、答辩稿】
巴旦木脱青皮设计是农产品加工领域的关键环节,其核心作用在于通过机械结构与工艺参数的协同优化,实现青皮与果仁的高效分离,同时避免果仁损伤。该设计需综合考虑物料特性、动力传递效率及设备稳定性,通过三维建模与二维图纸的精准…...

如何高效使用猫抓cat-catch:5个关键技巧完全指南
如何高效使用猫抓cat-catch:5个关键技巧完全指南 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 你是否经常遇到这样的情况:…...

微信聊天记录的数字档案馆:WeChatMsg实现数据永久保存与深度分析
微信聊天记录的数字档案馆:WeChatMsg实现数据永久保存与深度分析 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trendin…...

如何永久备份微信聊天记录?WeChatMsg完整解决方案指南
如何永久备份微信聊天记录?WeChatMsg完整解决方案指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/WeCha…...

猫抓插件:资源嗅探技术如何重塑浏览器媒体捕获体验
猫抓插件:资源嗅探技术如何重塑浏览器媒体捕获体验 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 在数字内容爆炸的时代,网…...

如何快速掌握正则表达式示例生成器:从入门到精通的完整指南
如何快速掌握正则表达式示例生成器:从入门到精通的完整指南 【免费下载链接】regexp-examples Generate strings that match a given regular expression 项目地址: https://gitcode.com/gh_mirrors/re/regexp-examples 正则表达式示例生成器(reg…...

M2LOrder模型Typora写作辅助插件开发:实时监测文章情感基调
M2LOrder模型Typora写作辅助插件开发:实时监测文章情感基调 不知道你有没有过这样的经历:写了一篇技术文章,自己读起来总觉得哪里不对劲,但又说不出来具体问题。或者写产品文案时,明明想表达积极向上的情绪࿰…...

Local SDXL-Turbo保姆级教程:导出为ONNX格式进一步优化推理速度
Local SDXL-Turbo保姆级教程:导出为ONNX格式进一步优化推理速度 1. 引言:为什么需要导出ONNX? 如果你已经体验过Local SDXL-Turbo那“打字即出图”的畅快感,可能会想:这速度已经很快了,还能不能再快一点&…...