视频降噪算法 hqdn3d 原理分析
视频降噪
视频降噪是一种处理技术,旨在减少视频中的噪声,提高画面质量。噪声可能来自多种源头,包括摄像机的传感器、压缩算法、传输过程中的干扰等。降噪处理对于视频监控、视频会议、电影后期制作以及任何需要高画质输出的应用场景都非常重要。
视频降噪技术通常包括以下几个关键点:
-
时域降噪:利用连续视频帧之间的时间冗余,通过分析连续帧中相同位置像素的变化来识别噪声,并进行相应的处理。
-
空域降噪:在单帧视频内,通过分析像素邻域内的亮度和色度信息来识别并减少噪声。
-
3D降噪:结合时域和空域信息,同时考虑视频帧的当前帧和相邻帧,进行更加复杂的降噪处理。
-
非线性降噪:某些算法采用非线性处理方法,如中值滤波或维纳滤波,来减少噪声,这些方法对某些类型的噪声特别有效。
-
自适应降噪:根据视频内容的复杂性和噪声水平动态调整降噪强度。
-
基于模型的降噪:使用统计模型或机器学习技术来识别噪声模式,并进行相应的降噪处理。
-
运动补偿:在视频中,运动物体的噪声处理需要特别考虑,以避免在运动补偿过程中引入伪影。
-
硬件加速:某些降噪算法可以在GPU或其他专用硬件上执行,以提高处理速度。
-
用户控制:许多降噪工具提供用户界面,允许用户根据需要调整降噪参数。
关于视频降噪的算法综述可以参考:视频降噪综述。
hqdn3d
hqdn3d(High Quality 3D Denoise)是一种高质量的三维视频降噪算法,主要用于去除视频中的噪声。hqdn3d算法能够有效地去除视频中的高频率噪声,同时尽量减少图像的失真和模糊,保持视频质量。
hqdn3d算法已经被实现为AviSynth插件,并且可以在FFmpeg中作为滤镜使用,例如通过命令 ffmpeg -i input.avi -vf hqdn3d output.mp4 来应用。高质量去噪3D是一个AviSynth端口的同名MPlayer过滤器。采用3路低通滤波,在完全去除高频噪声的同时最大限度地减少混合伪影。
-
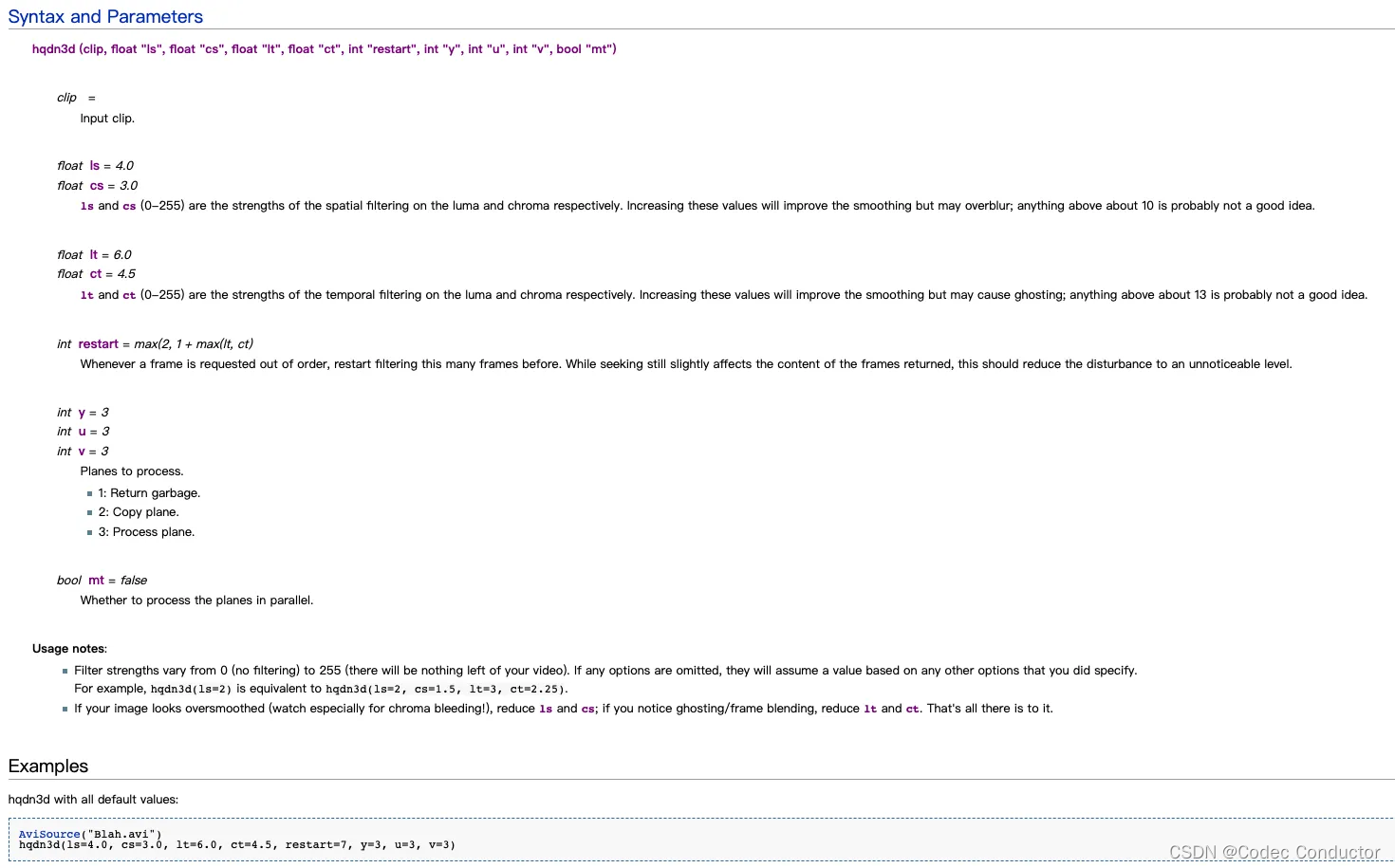
在AviSynth中使用 hqdn3d 方法如下:有对应的空域滤波、时域滤波的亮度和色度强度设置参数。
-
AviSynth官网:http://www.avisynth.org/
-
FFmpeg 官网:https://ffmpeg.org/
原理
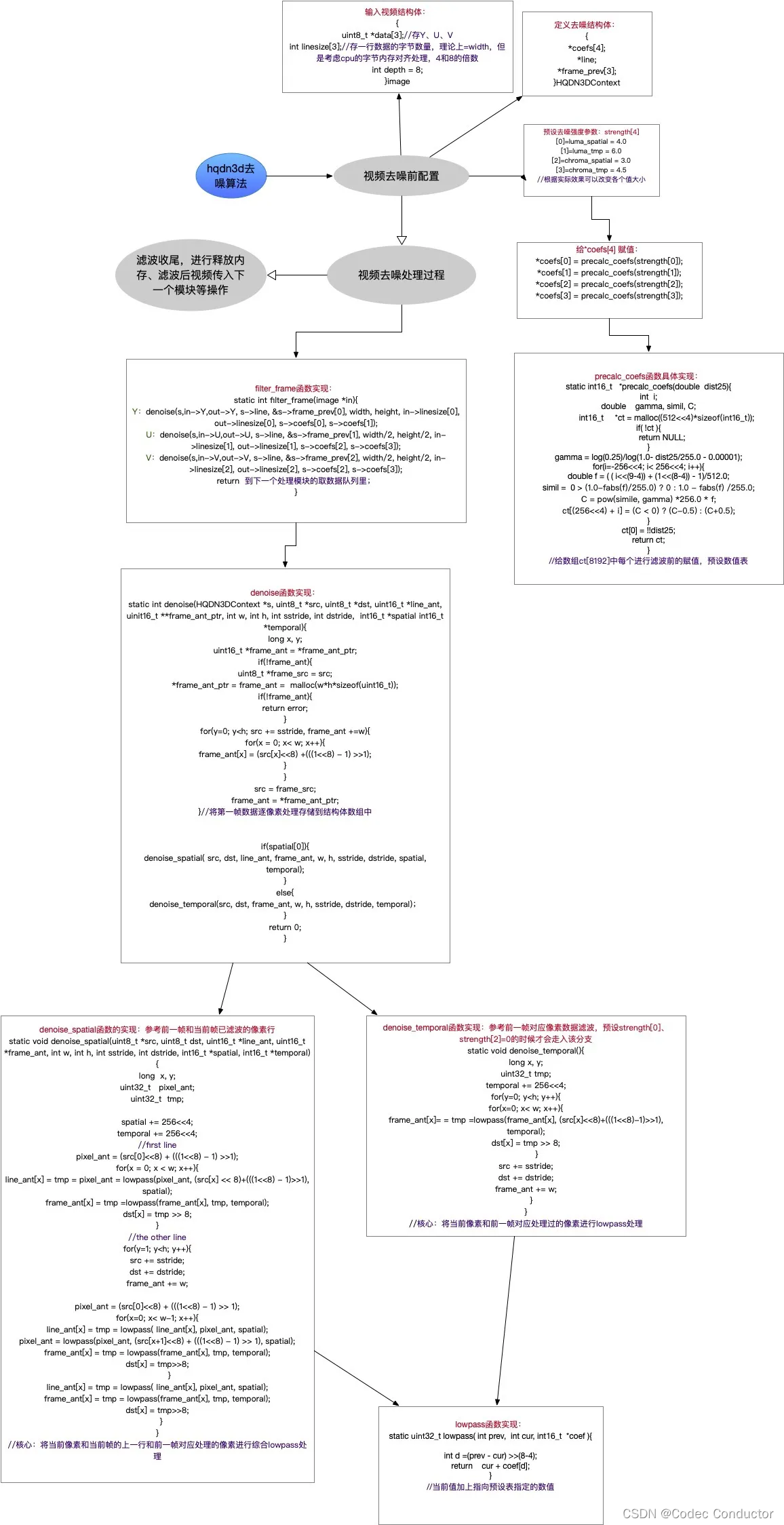
hqdn3d 算法的原理相对比较容易理解,总结其原理,如下:
- 该算法是像素处理,不涉及频域和运动搜索;
- 空域去噪时,当前像素参考当前帧左邻、上邻和前一帧同一位置的像素,对每个像素多次应用低通滤波器;
- 时域去噪时,参考前一帧同一位置的像素,对每个像素应用一个低通滤波器;
- 根据相邻像素的差,确定偏移量,将相邻像素颜色值“拉近”,即对像素做加减法,以达到降噪目的;
- 对于较小的像素差异,hqdn3d会拉近距离,若差异较大,降低偏置系数,达到保边效果;
- 可以通过外部设置滤波强度,调整峰值位置;
- 分析 FFmpeg 中 hqdn3d 算法,算法实现流程如下:
源码
- FFmpeg 中 filter 滤镜对应的 hqdn3d 算法实现
/** Copyright (c) 2003 Daniel Moreno <comac AT comac DOT darktech DOT org>* Copyright (c) 2010 Baptiste Coudurier* Copyright (c) 2012 Loren Merritt** This file is part of FFmpeg, ported from MPlayer.** FFmpeg is free software; you can redistribute it and/or modify* it under the terms of the GNU General Public License as published by* the Free Software Foundation; either version 2 of the License, or* (at your option) any later version.** FFmpeg is distributed in the hope that it will be useful,* but WITHOUT ANY WARRANTY; without even the implied warranty of* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the* GNU General Public License for more details.** You should have received a copy of the GNU General Public License along* with FFmpeg; if not, write to the Free Software Foundation, Inc.,* 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA.*//*** @file* high quality 3d video denoiser, ported from MPlayer* libmpcodecs/vf_hqdn3d.c.*/#include <float.h>#include "config.h"
#include "libavutil/attributes.h"
#include "libavutil/common.h"
#include "libavutil/pixdesc.h"
#include "libavutil/intreadwrite.h"
#include "libavutil/opt.h"#include "avfilter.h"
#include "formats.h"
#include "internal.h"
#include "video.h"
#include "vf_hqdn3d.h"#define LUT_BITS (depth==16 ? 8 : 4)
#define LOAD(x) (((depth == 8 ? src[x] : AV_RN16A(src + (x) * 2)) << (16 - depth))\+ (((1 << (16 - depth)) - 1) >> 1))
#define STORE(x,val) (depth == 8 ? dst[x] = (val) >> (16 - depth) : \AV_WN16A(dst + (x) * 2, (val) >> (16 - depth)))av_always_inline
static uint32_t lowpass(int prev, int cur, int16_t *coef, int depth)
{int d = (prev - cur) >> (8 - LUT_BITS);return cur + coef[d];
}av_always_inline
static void denoise_temporal(uint8_t *src, uint8_t *dst,uint16_t *frame_ant,int w, int h, int sstride, int dstride,int16_t *temporal, int depth)
{long x, y;uint32_t tmp;temporal += 256 << LUT_BITS;for (y = 0; y < h; y++) {for (x = 0; x < w; x++) {frame_ant[x] = tmp = lowpass(frame_ant[x], LOAD(x), temporal, depth);STORE(x, tmp);}src += sstride;dst += dstride;frame_ant += w;}
}av_always_inline
static void denoise_spatial(HQDN3DContext *s,uint8_t *src, uint8_t *dst,uint16_t *line_ant, uint16_t *frame_ant,int w, int h, int sstride, int dstride,int16_t *spatial, int16_t *temporal, int depth)
{long x, y;uint32_t pixel_ant;uint32_t tmp;spatial += 256 << LUT_BITS;temporal += 256 << LUT_BITS;/* First line has no top neighbor. Only left one for each tmp and* last frame */pixel_ant = LOAD(0);for (x = 0; x < w; x++) {line_ant[x] = tmp = pixel_ant = lowpass(pixel_ant, LOAD(x), spatial, depth);frame_ant[x] = tmp = lowpass(frame_ant[x], tmp, temporal, depth);STORE(x, tmp);}for (y = 1; y < h; y++) {src += sstride;dst += dstride;frame_ant += w;if (s->denoise_row[depth]) {s->denoise_row[depth](src, dst, line_ant, frame_ant, w, spatial, temporal);continue;}pixel_ant = LOAD(0);for (x = 0; x < w-1; x++) {line_ant[x] = tmp = lowpass(line_ant[x], pixel_ant, spatial, depth);pixel_ant = lowpass(pixel_ant, LOAD(x+1), spatial, depth);frame_ant[x] = tmp = lowpass(frame_ant[x], tmp, temporal, depth);STORE(x, tmp);}line_ant[x] = tmp = lowpass(line_ant[x], pixel_ant, spatial, depth);frame_ant[x] = tmp = lowpass(frame_ant[x], tmp, temporal, depth);STORE(x, tmp);}
}av_always_inline
static int denoise_depth(HQDN3DContext *s,uint8_t *src, uint8_t *dst,uint16_t *line_ant, uint16_t **frame_ant_ptr,int w, int h, int sstride, int dstride,int16_t *spatial, int16_t *temporal, int depth)
{// FIXME: For 16-bit depth, frame_ant could be a pointer to the previous// filtered frame rather than a separate buffer.long x, y;uint16_t *frame_ant = *frame_ant_ptr;if (!frame_ant) {uint8_t *frame_src = src;*frame_ant_ptr = frame_ant = av_malloc_array(w, h*sizeof(uint16_t));if (!frame_ant)return AVERROR(ENOMEM);for (y = 0; y < h; y++, src += sstride, frame_ant += w)for (x = 0; x < w; x++)frame_ant[x] = LOAD(x);src = frame_src;frame_ant = *frame_ant_ptr;}if (spatial[0])denoise_spatial(s, src, dst, line_ant, frame_ant,w, h, sstride, dstride, spatial, temporal, depth);elsedenoise_temporal(src, dst, frame_ant,w, h, sstride, dstride, temporal, depth);emms_c();return 0;
}#define denoise(...) \do { \int ret = AVERROR_BUG; \switch (s->depth) { \case 8: ret = denoise_depth(__VA_ARGS__, 8); break; \case 9: ret = denoise_depth(__VA_ARGS__, 9); break; \case 10: ret = denoise_depth(__VA_ARGS__, 10); break; \case 12: ret = denoise_depth(__VA_ARGS__, 12); break; \case 14: ret = denoise_depth(__VA_ARGS__, 14); break; \case 16: ret = denoise_depth(__VA_ARGS__, 16); break; \} \if (ret < 0) { \av_frame_free(&out); \if (!direct) \av_frame_free(&in); \return ret; \} \} while (0)static void precalc_coefs(double dist25, int depth, int16_t *ct)
{int i;double gamma, simil, C;gamma = log(0.25) / log(1.0 - FFMIN(dist25,252.0)/255.0 - 0.00001);for (i = -256<<LUT_BITS; i < 256<<LUT_BITS; i++) {double f = ((i<<(9-LUT_BITS)) + (1<<(8-LUT_BITS)) - 1) / 512.0; // midpoint of the binsimil = FFMAX(0, 1.0 - fabs(f) / 255.0);C = pow(simil, gamma) * 256.0 * f;ct[(256<<LUT_BITS)+i] = lrint(C);}ct[0] = !!dist25;
}#define PARAM1_DEFAULT 4.0
#define PARAM2_DEFAULT 3.0
#define PARAM3_DEFAULT 6.0static av_cold int init(AVFilterContext *ctx)
{HQDN3DContext *s = ctx->priv;if (!s->strength[LUMA_SPATIAL])s->strength[LUMA_SPATIAL] = PARAM1_DEFAULT;if (!s->strength[CHROMA_SPATIAL])s->strength[CHROMA_SPATIAL] = PARAM2_DEFAULT * s->strength[LUMA_SPATIAL] / PARAM1_DEFAULT;if (!s->strength[LUMA_TMP])s->strength[LUMA_TMP] = PARAM3_DEFAULT * s->strength[LUMA_SPATIAL] / PARAM1_DEFAULT;if (!s->strength[CHROMA_TMP])s->strength[CHROMA_TMP] = s->strength[LUMA_TMP] * s->strength[CHROMA_SPATIAL] / s->strength[LUMA_SPATIAL];av_log(ctx, AV_LOG_VERBOSE, "ls:%f cs:%f lt:%f ct:%f\n",s->strength[LUMA_SPATIAL], s->strength[CHROMA_SPATIAL],s->strength[LUMA_TMP], s->strength[CHROMA_TMP]);return 0;
}static av_cold void uninit(AVFilterContext *ctx)
{HQDN3DContext *s = ctx->priv;av_freep(&s->coefs[0]);av_freep(&s->coefs[1]);av_freep(&s->coefs[2]);av_freep(&s->coefs[3]);av_freep(&s->line[0]);av_freep(&s->line[1]);av_freep(&s->line[2]);av_freep(&s->frame_prev[0]);av_freep(&s->frame_prev[1]);av_freep(&s->frame_prev[2]);
}static int query_formats(AVFilterContext *ctx)
{static const enum AVPixelFormat pix_fmts[] = {AV_PIX_FMT_YUV420P, AV_PIX_FMT_YUV422P, AV_PIX_FMT_YUV444P,AV_PIX_FMT_YUV410P, AV_PIX_FMT_YUV411P, AV_PIX_FMT_YUV440P,AV_PIX_FMT_YUVJ420P, AV_PIX_FMT_YUVJ422P, AV_PIX_FMT_YUVJ444P, AV_PIX_FMT_YUVJ440P,AV_PIX_FMT_YUV420P9, AV_PIX_FMT_YUV422P9, AV_PIX_FMT_YUV444P9,AV_PIX_FMT_YUV420P10, AV_PIX_FMT_YUV422P10, AV_PIX_FMT_YUV444P10,AV_PIX_FMT_YUV440P10,AV_PIX_FMT_YUV444P12, AV_PIX_FMT_YUV422P12, AV_PIX_FMT_YUV420P12,AV_PIX_FMT_YUV440P12,AV_PIX_FMT_YUV444P14, AV_PIX_FMT_YUV422P14, AV_PIX_FMT_YUV420P14,AV_PIX_FMT_YUV420P16, AV_PIX_FMT_YUV422P16, AV_PIX_FMT_YUV444P16,AV_PIX_FMT_NONE};AVFilterFormats *fmts_list = ff_make_format_list(pix_fmts);if (!fmts_list)return AVERROR(ENOMEM);return ff_set_common_formats(ctx, fmts_list);
}static void calc_coefs(AVFilterContext *ctx)
{HQDN3DContext *s = ctx->priv;for (int i = 0; i < 4; i++)precalc_coefs(s->strength[i], s->depth, s->coefs[i]);
}static int config_input(AVFilterLink *inlink)
{AVFilterContext *ctx = inlink->dst;HQDN3DContext *s = inlink->dst->priv;const AVPixFmtDescriptor *desc = av_pix_fmt_desc_get(inlink->format);int i, depth;uninit(inlink->dst);s->hsub = desc->log2_chroma_w;s->vsub = desc->log2_chroma_h;s->depth = depth = desc->comp[0].depth;for (i = 0; i < 3; i++) {s->line[i] = av_malloc_array(inlink->w, sizeof(*s->line[i]));if (!s->line[i])return AVERROR(ENOMEM);}for (i = 0; i < 4; i++) {s->coefs[i] = av_malloc((512<<LUT_BITS) * sizeof(int16_t));if (!s->coefs[i])return AVERROR(ENOMEM);}calc_coefs(ctx);if (ARCH_X86)ff_hqdn3d_init_x86(s);return 0;
}typedef struct ThreadData {AVFrame *in, *out;int direct;
} ThreadData;static int do_denoise(AVFilterContext *ctx, void *data, int job_nr, int n_jobs)
{HQDN3DContext *s = ctx->priv;const ThreadData *td = data;AVFrame *out = td->out;AVFrame *in = td->in;int direct = td->direct;denoise(s, in->data[job_nr], out->data[job_nr],s->line[job_nr], &s->frame_prev[job_nr],AV_CEIL_RSHIFT(in->width, (!!job_nr * s->hsub)),AV_CEIL_RSHIFT(in->height, (!!job_nr * s->vsub)),in->linesize[job_nr], out->linesize[job_nr],s->coefs[job_nr ? CHROMA_SPATIAL : LUMA_SPATIAL],s->coefs[job_nr ? CHROMA_TMP : LUMA_TMP]);return 0;
}static int filter_frame(AVFilterLink *inlink, AVFrame *in)
{AVFilterContext *ctx = inlink->dst;AVFilterLink *outlink = ctx->outputs[0];AVFrame *out;int direct = av_frame_is_writable(in) && !ctx->is_disabled;ThreadData td;if (direct) {out = in;} else {out = ff_get_video_buffer(outlink, outlink->w, outlink->h);if (!out) {av_frame_free(&in);return AVERROR(ENOMEM);}av_frame_copy_props(out, in);}td.in = in;td.out = out;td.direct = direct;/* one thread per plane */ctx->internal->execute(ctx, do_denoise, &td, NULL, 3);if (ctx->is_disabled) {av_frame_free(&out);return ff_filter_frame(outlink, in);}if (!direct)av_frame_free(&in);return ff_filter_frame(outlink, out);
}static int process_command(AVFilterContext *ctx, const char *cmd, const char *args,char *res, int res_len, int flags)
{int ret;ret = ff_filter_process_command(ctx, cmd, args, res, res_len, flags);if (ret < 0)return ret;calc_coefs(ctx);return 0;
}#define OFFSET(x) offsetof(HQDN3DContext, x)
#define FLAGS AV_OPT_FLAG_VIDEO_PARAM | AV_OPT_FLAG_FILTERING_PARAM | AV_OPT_FLAG_RUNTIME_PARAM
static const AVOption hqdn3d_options[] = {{ "luma_spatial", "spatial luma strength", OFFSET(strength[LUMA_SPATIAL]), AV_OPT_TYPE_DOUBLE, { .dbl = 0.0 }, 0, DBL_MAX, FLAGS },{ "chroma_spatial", "spatial chroma strength", OFFSET(strength[CHROMA_SPATIAL]), AV_OPT_TYPE_DOUBLE, { .dbl = 0.0 }, 0, DBL_MAX, FLAGS },{ "luma_tmp", "temporal luma strength", OFFSET(strength[LUMA_TMP]), AV_OPT_TYPE_DOUBLE, { .dbl = 0.0 }, 0, DBL_MAX, FLAGS },{ "chroma_tmp", "temporal chroma strength", OFFSET(strength[CHROMA_TMP]), AV_OPT_TYPE_DOUBLE, { .dbl = 0.0 }, 0, DBL_MAX, FLAGS },{ NULL }
};AVFILTER_DEFINE_CLASS(hqdn3d);static const AVFilterPad avfilter_vf_hqdn3d_inputs[] = {{.name = "default",.type = AVMEDIA_TYPE_VIDEO,.config_props = config_input,.filter_frame = filter_frame,},{ NULL }
};static const AVFilterPad avfilter_vf_hqdn3d_outputs[] = {{.name = "default",.type = AVMEDIA_TYPE_VIDEO},{ NULL }
};AVFilter ff_vf_hqdn3d = {.name = "hqdn3d",.description = NULL_IF_CONFIG_SMALL("Apply a High Quality 3D Denoiser."),.priv_size = sizeof(HQDN3DContext),.priv_class = &hqdn3d_class,.init = init,.uninit = uninit,.query_formats = query_formats,.inputs = avfilter_vf_hqdn3d_inputs,.outputs = avfilter_vf_hqdn3d_outputs,.flags = AVFILTER_FLAG_SUPPORT_TIMELINE_INTERNAL | AVFILTER_FLAG_SLICE_THREADS,.process_command = process_command,
};相关文章:
视频降噪算法 hqdn3d 原理分析
视频降噪 视频降噪是一种处理技术,旨在减少视频中的噪声,提高画面质量。噪声可能来自多种源头,包括摄像机的传感器、压缩算法、传输过程中的干扰等。降噪处理对于视频监控、视频会议、电影后期制作以及任何需要高画质输出的应用场景都非常重…...
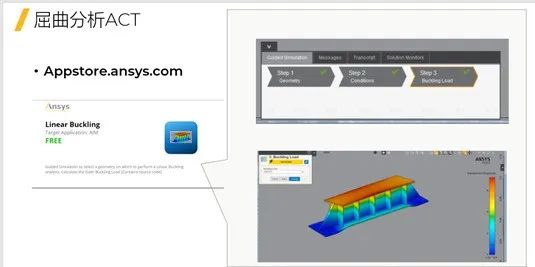
Ansys Mechanical|屈曲分析技术
屈曲分析的基本概念 当受拉杆件的应力达到屈服极限或强度极限时,将引起塑性变形或断裂。这些是由于强度不足所引起的失效。 在工程中,我们会注意到当细长杆件受压时,表现出与强度失效完全不同的性质。当杆件受压超过某一临界值时࿰…...

【大模型微调】一文掌握7种大模型微调的方法
本篇文章深入分析了大型模型微调的基本理念和多样化技术,细致介绍了LoRA、适配器调整(Adapter Tuning)、前缀调整(Prefix Tuning)等多个微调方法。详细讨论了每一种策略的基本原则、主要优点以及适宜应用场景,使得读者可以依据特定的应用要求和计算资源限…...

MySQL表突然卡死,删、查操作加载不停解决办法
今天遇到了MySQL删表的时候卡死情况。然后通过网上查阅资料和项目组沟通,了解到了有多人同时对同一张表进行了操作。我和另一个同事同时进行了删除操作,然后另两位同时进行了查询操作,然后还有一位同事用dolphin调度,用datax采集数…...

Rust 标准库的结构及其模块路径
在 Rust 中,标准库提供了一组核心功能,以帮助开发者执行常见的编程任务。当使用这些功能时,我们需要通过特定的模块路径来引用它们。下面,我们将详细介绍 Rust 标准库的结构,并提供相应的 use 路径。 Rust 标准库模块…...

003_PyCharm的安装与使用
如果你正在学习PyQt,本系列教程完全可以带你入门直至入土。 所谓从零开始,就是从软件安装、环境配置开始。 不跳过一个细节,不漏掉一行代码,不省略一个例图。 IDE 开始学习一个编程语言,我们肯定是首先得安装好它&…...

事件传递机制
IOS面试题(UIView) ----- 事件传递机制 - 简书 面试题: 在以下场景中,父视图 ParentView 上有三个子视图 ViewA、ViewB 和 ViewC。ViewA 完全位于 ParentView 的范围内,ViewB 有一半在 ParentView 的范围内,而 ViewC 完全位于 Par…...
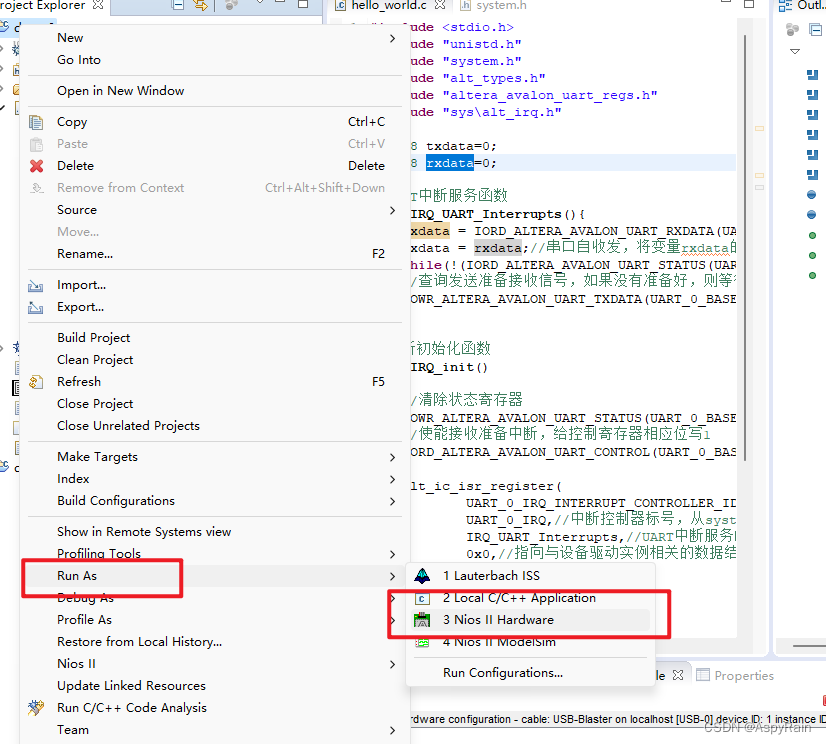
DE2-115串口通信
目录 一、 内容概要二、 Hello Nios-II2.1 Nios-II编程2.1.1 硬件Ⅰ 搭建环境Ⅱ 编写代码 2.1.2 软件2.1.3 烧录Ⅰ硬件Ⅱ 软件 2.2 verilog编程 三、 心得体会 一、 内容概要 分别用Verilog和Nios软件编程, 实现DE2-115开发板串口输出“Hello Nios-II”字符到笔记本电脑串口助…...

Danfoss丹佛斯S90泵比例放大器
S90R042、S90R055、S90R075、S90R100、S90R130、S90R180、S90R250电气排量控制变量泵比例阀放大器,电气排量控制为高增益控制方式:通过微小变化的输入电流控制信号即可推动伺服阀主阀芯至全开口位置,进而将最大流量的控制油引入到伺服油缸。伺…...
对话YashanDB CTO陈志标:如何推动国产数据库长远发展
深圳计算科学研究院(以下简称“深算院”)是深圳市人民政府2018年11月批准建设的“十大基础研究机构”之一,由深圳市科技创新委员会主管、深圳大学举办、深圳市龙华区人民政府共建的二类事业法人单位。 崖山数据库系统YashanDB是深算院完全自主…...

ip显示地址和实际地址不一样:原因解析与应对策略
在数字化时代,IP地址作为我们在互联网上的身份标识,其重要性不言而喻。然而,有时我们会遇到ip显示地址和实际地址不一样的情况,这不仅可能影响到我们的网络体验,还可能引发一系列安全和隐私问题。那么,造成…...

visual studio snippet常用注释片段
Visual Studio 2022 添加自定义代码片段_vs2022 代码片段-CSDN博客 dclass.snippet: <?xml version"1.0" encoding"utf-8"?> <CodeSnippets xmlns"http://schemas.microsoft.com/VisualStudio/2005/CodeSnippet"> …...
ubuntu下不生成core dumped
1、先用ulimit -c,如果看到0,说明没有开core dump。 所以我们输入ulimit -c unlimited,打开core dump。 再次用ulimit -c,看到unlimited了,说明core dump打开了。 注意这句ulimit -c unlimited只对当前会话有效。要永…...

python开发的学习路线
I. 基础知识学习 A. Python基础语法 变量和数据类型 学习如何定义变量,理解并使用不同的数据类型(整数、浮点数、字符串、布尔值等)。 掌握数字类型的转换和操作。 熟悉字符串的基本操作,如拼接、切片、替换和查找。 …...

vite+vue3 部署后,总是需要清除缓存的问题
1.每次部署后,需要清除缓存,才能看到最新代码,给打包文件加上hash就可以解决此问题。 vite.config.ts文件中加以下代码 build: {rollupOptions: {output: {entryFileNames: assets/[name].[hash].js,chunkFileNames: assets/[name].[hash].j…...

多态:解锁面向对象编程的无限可能
1. 概述 多态(Polymorphism)是面向对象编程的三大核心特性之一(另两个是封装和继承)。多态意味着不同的对象对同一消息做出不同的响应。简单来说,多态允许你使用父类引用指向子类对象,并且当调用方法时&am…...
:记录的增删改查)
学习MySQL(四):记录的增删改查
记录的增、删、改 增 -- 插入一条数据 INSERT INTO 表名(字段 1,字段2,字段3) VALUES(值 1,值2,值3) INSERT INTO 表名 VALUES(值 1,值2,值3&am…...

如何使用Python进行网页爬取
Python爬虫案例可以有很多种,但我会为你提供一个简单的案例,该案例使用Python的requests库来爬取一个网页的内容,并使用BeautifulSoup库来解析HTML并提取特定的信息。 假设我们要从某个新闻网站(例如:示例网站&#x…...
设计模式)
Spring的IOC(Inversion of Control)设计模式
Spring的IOC(Inversion of Control)是一种设计模式,它通过控制反转的思想来降低组件之间的耦合度。在Spring框架中,IOC容器负责管理应用程序中的对象,使得对象之间的依赖关系由容器来维护和注入。 以下是Spring IOC的…...

深度学习知识点总结
深度学习是机器学习领域中的一个重要研究方向,它致力于模拟人脑的学习过程,使机器能够像人一样具有分析学习能力,识别文字、图像和声音等数据。以下是深度学习的一些关键知识点总结: 定义与目标: 深度学习是学习样本数…...

ARM9E-S内存接口与中断机制深度解析
1. ARM9E-S内存接口架构解析 ARM9E-S处理器的内存接口采用高度流水线化设计,这种架构通过预广播机制显著提升了内存访问效率。在实际工程应用中,理解这一设计原理对构建高性能嵌入式系统至关重要。 1.1 流水线化数据接口工作原理 内存接口的流水线化体…...

Flink窗口实战避坑指南:从AggregateFunction到ProcessWindowFunction,我踩过的那些坑
Flink窗口实战避坑指南:从AggregateFunction到ProcessWindowFunction的深度解析 第一次在真实项目中使用Flink窗口时,我像发现新大陆一样兴奋。直到凌晨三点被报警短信惊醒,才发现窗口计算的结果完全偏离预期——这让我意识到,窗口…...

ONNXRuntime GPU推理想用BFloat16加速?手把手教你搞定PyTorch + CUDA环境配置与避坑
ONNXRuntime GPU推理想用BFloat16加速?手把手教你搞定PyTorch CUDA环境配置与避坑 在深度学习模型部署领域,BFloat16数据类型正逐渐成为提升推理性能的新宠。这种16位浮点格式保留了与32位浮点相同的指数位,在保持数值范围的同时减少了内存占…...

柔性LED灯丝DIY:从电路原理到创意饰品制作全攻略
1. 项目概述:当生日遇上柔性LED灯丝给孩子的生日派对准备一份独一无二的、会发光的惊喜,是很多家长和手工爱好者的心愿。这次,我们不买现成的塑料灯牌,而是亲手做一个能戴在头上或挂在脖子上的“生日数字灯冠”。这个项目的核心&a…...

快速免费解锁网易云音乐NCM格式:ncmdumpGUI完整使用指南
快速免费解锁网易云音乐NCM格式:ncmdumpGUI完整使用指南 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾在网易云音乐下载了心爱的歌曲&am…...

免费额度即将失效?ElevenLabs 2024.6.1新规生效前,必须完成的5项额度迁移准备
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs免费额度机制的本质解析 ElevenLabs 的免费额度并非按“每月重置”的静态配额,而是一种基于账户生命周期的动态信用池(Credit Pool),其底层由实…...

3个高效方法:免费获取百度网盘高速下载直链的完整指南
3个高效方法:免费获取百度网盘高速下载直链的完整指南 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 当我们面对百度网盘缓慢的下载速度时,常常感到无…...

基于Groq LPU与React技术栈构建极速AI聊天应用实战
1. 项目概述:当极速推理遇上聊天应用最近在折腾AI应用开发的朋友,估计都绕不开一个词:推理速度。模型能力再强,如果生成一句话要等上十几秒,用户体验就无从谈起。正是在这种背景下,我注意到了unclecode/gro…...

智能GUI自动化:从SAG架构到实战部署的完整指南
1. 项目概述与核心价值最近在开源社区里,我注意到一个挺有意思的项目,叫openclaw-skill-sag。乍一看这个标题,可能会觉得有点抽象,但如果你对自动化、机器人流程自动化(RPA)或者智能体(Agent&am…...

如何永久保存你的微信聊天记录?WeChatExporter开源工具完整指南
如何永久保存你的微信聊天记录?WeChatExporter开源工具完整指南 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾经历过手机丢失、微信重装后珍贵聊天…...