未来机器人的发展方向
未来机器人的发展方向是多元化且充满潜力的。以下是一些主要的发展方向:
-
人工智能与机器学习的集成:随着人工智能(AI)和机器学习(ML)技术的不断进步,机器人将变得更加智能化和自主化。这些技术将使机器人能够处理更复杂的任务,例如通过学习和经验来改进其性能,从而适应不同的环境和需求。
-
机器人与人类的协同工作:未来的机器人将更多地与人类进行协同工作,而不是简单地替代人类。它们将能够理解和适应人类的指令和需求,与人类一起完成任务,提高工作效率和质量。这种协同工作将涉及到人机交互、情感计算等领域的技术。
-
机器人的多功能性和灵活性:未来的机器人将具有更高的多功能性和灵活性,能够适应不同的环境和任务。这包括在复杂环境中移动、抓取和操作物体,以及处理各种传感器和输入数据的能力。机器人的设计和制造将更加注重模块化和可重构性,以便更容易地适应不同的应用场景。
-
机器人的自主导航和感知能力:未来的机器人将具有更强的自主导航和感知能力,能够自主规划路径、避障和识别物体。这将涉及到计算机视觉、传感器融合、深度学习等技术,使机器人能够更准确地感知周围环境并做出决策。
-
机器人的情感交互和认知能力:未来的机器人将更加注重与人类的情感交互和认知能力。它们将能够识别和理解人类的情感状态,并作出相应的反应。这将涉及到自然语言处理、语音合成、面部表情识别等技术,使机器人能够更自然地与人类进行交流和互动。
-
机器人的普及和个性化:随着技术的进步和成本的降低,未来的机器人将更加普及和个性化。人们可以根据自己的需求和喜好定制机器人,以满足不同的生活和工作需求。这将促进机器人技术的广泛应用和普及化。
-
机器人在医疗、农业、服务等领域的应用:未来的机器人将在医疗、农业、服务等领域发挥更加重要的作用。在医疗领域,机器人将能够协助医生进行手术、康复治疗和远程医疗等操作;在农业领域,机器人将能够自动化种植、施肥、收割等作业;在服务领域,机器人将能够提供更加便捷、高效的服务,如酒店服务、家庭助手等。
总之,未来机器人的发展方向将更加注重智能化、自主化、多功能性、灵活性和与人类的协同工作。随着技术的不断进步和应用场景的不断拓展,机器人将在更多领域发挥重要作用,为人类社会带来更多的便利和发展机遇。
相关文章:

未来机器人的发展方向
未来机器人的发展方向是多元化且充满潜力的。以下是一些主要的发展方向: 人工智能与机器学习的集成:随着人工智能(AI)和机器学习(ML)技术的不断进步,机器人将变得更加智能化和自主化。这些技术将…...

美国硅谷高防服务器有哪些优势
美国硅谷高防服务器是位于美国硅谷的,具备高级防护能力的服务器。这种服务器针对网络安全威胁提供了增强的保护措施,以确保数据的安全和业务的连续性。Rak部落小编为您整理发布美国硅谷高防服务器有哪些优势。 具体介绍如下: 1. 安全性&#…...
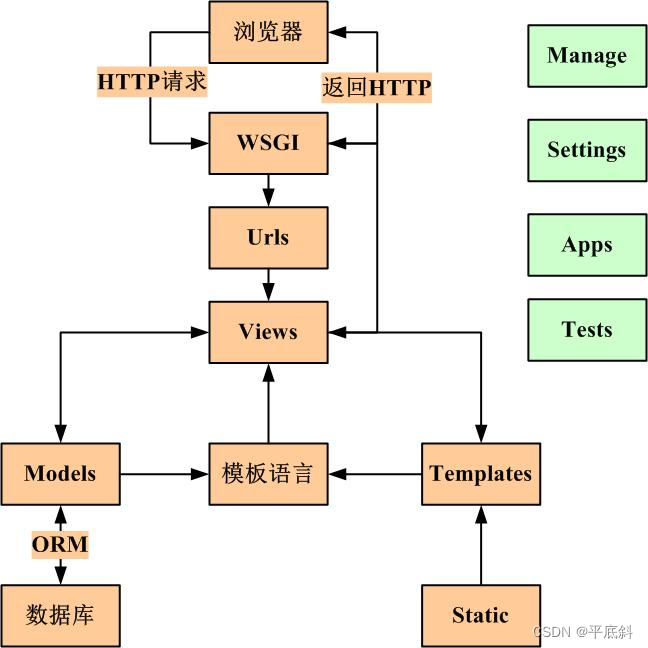
Django介绍:探索Python最受欢迎的Web框架
文章目录 Django是什么Django的核心特性1. MTV架构2. 自带的Admin后台管理系统3. ORM(对象关系映射)4. 强大的表单处理5. 完善的文档和活跃的社区 快速入门:使用Django创建一个简单的Web应用步骤1:安装Django步骤2:创建…...

【Unity Shader入门精要 第9章】更复杂的光照(四)
1. 透明度测试物体的阴影 对于物体有片元丢弃的情况,比如透明度测试或者后边会讲到的消融效果,使用默认的 ShadowCaster Pass 会产生问题,这是因为该Pass在生成阴影映射纹理时,没有考虑被丢弃的片元,而是使用完整的模…...

【软件工程】【23.10】p2
关键字: 软件复用技术、过程途径、特定需求是文档核心、数据字典条目、高内聚低耦合独立性、数据流图映射模块结构图、UML依赖、用例图关系、RUB迭代、程序规格说明等价类划分、有效性测试的目标、喷泉模型面向对象、软件验证过程、CMMI...

WPF--几种常用定时器Timer汇总
1.WPF中常用4种Timer: System.Windows.Threading.DispatcherTimer(UI操作线程) 这是一个基于WPF Dispatcher的计时器。它可以在指定的时间间隔内触发Tick事件,并在UI线程上执行回调函数,方便进行UI更新操作。 System.Timers.Timer 这是一个基…...

在vue中实现下载文件功能
实际操作为,在表格中 我们可以获取到文件的id,通过插槽就可以实现 <template #default"scope"><el-button type"text" click"handleDown(scope.row)"><span>下载</span></el-button> </…...
文件中海量数据的排序
文件中海量数据的排序 题目: 跟之前堆排序可以解决TopK问题一样,我们来看看归并排序会用来解决什么问题? 思路: 我们说归并排序是外排序。其实就是将数据分成一个个小段,在内存中进行排序,再拿出内存&am…...

java项目之视频网站系统源码(springboot+vue+mysql)
风定落花生,歌声逐流水,大家好我是风歌,混迹在java圈的辛苦码农。今天要和大家聊的是一款基于springboot的视频网站系统。项目源码以及部署相关请联系风歌,文末附上联系信息 。 项目简介: 视频网站系统的主要使用者管…...
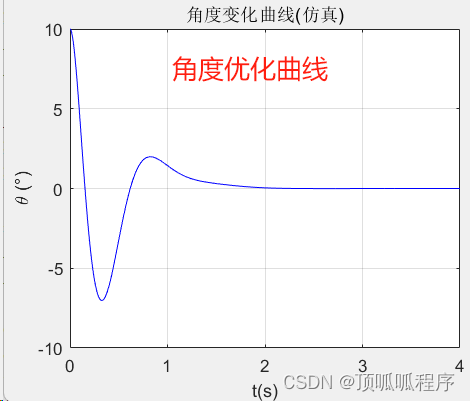
262 基于matlab的一级倒立摆仿真
基于matlab的一级倒立摆仿真,在对一级倒立摆进行数学建模的基础上,对模型进行线性化,得到其状态空间模型,利用二次型最优控制方法得出控制率。输出角度和位置优化曲线。程序已调通,可直接运行。 262 一级倒立摆仿真 状…...

智能无网远控再升级 向日葵Q2Pro升级版发布
无网或者内网设备也想要进行远程控制,是不是听上去有些天方夜谭了?其实这类特种设备的远程控制需求是非常强的,比如医疗/工控设备的远程运维、使用指导教学等等。 实际上,只要这类设备有屏幕,支持可视化的桌面操作&am…...

2024电工杯A题详细思路代码分析数学建模:园区微电网风光储协调优化配置
题目分析:园区微电网风光储协调优化配置 我们会先给出三个问题总体的分析,最后会详细分析问题一的建模和详细内容。 背景: 园区微电网由风光发电和主电网联合为负荷供电,为了尽量提高风光电量的负荷占比,需配置较高比…...
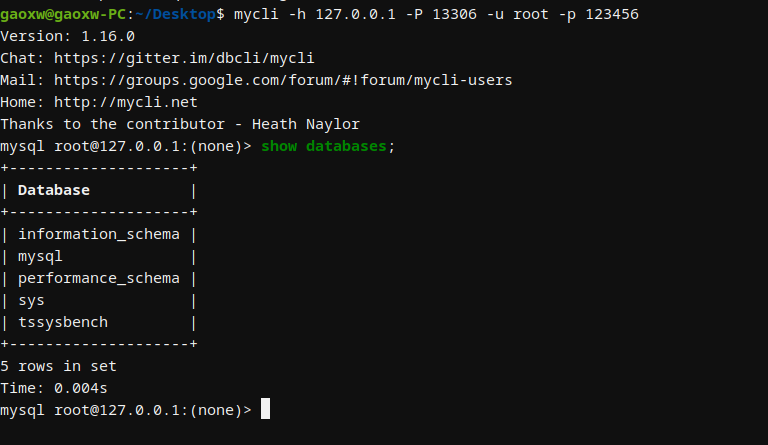
Docker搭建mysql性能测试环境
OpenEuler使用Docker搭建mysql性能测试环境 一、安装Docker二、docker安装mysql三、测试mysql连接 一、安装Docker 建立源文件vim /etc/yum.repos.d/docker-ce.repo增加内容[docker-ce-stable] nameDocker CE Stable - $basearch baseurlhttps://repo.huaweicloud.com/docker…...
关于开启直连v2rayn代理Fiddler Charles bp抓包失败问题
Fiddler 使用插件:proxy switchyomega 配置代理8888端口为fiddler && charles的监听端口 此时fiddler提示代理已更改点击变更捕获,这时不需要进行点击只需要开启上述插件即可抓到包并且国外代理,如果点击的话回自动更新为原来的ip 即…...

Python 爬虫编写入门
一、爬虫概述 网络爬虫(Web Crawler)或称为网络蜘蛛(Web Spider),是一种按照一定规则,自动抓取互联网信息的程序或者脚本。它们可以自动化地浏览网络中的信息,通过解析网页内容,提取…...
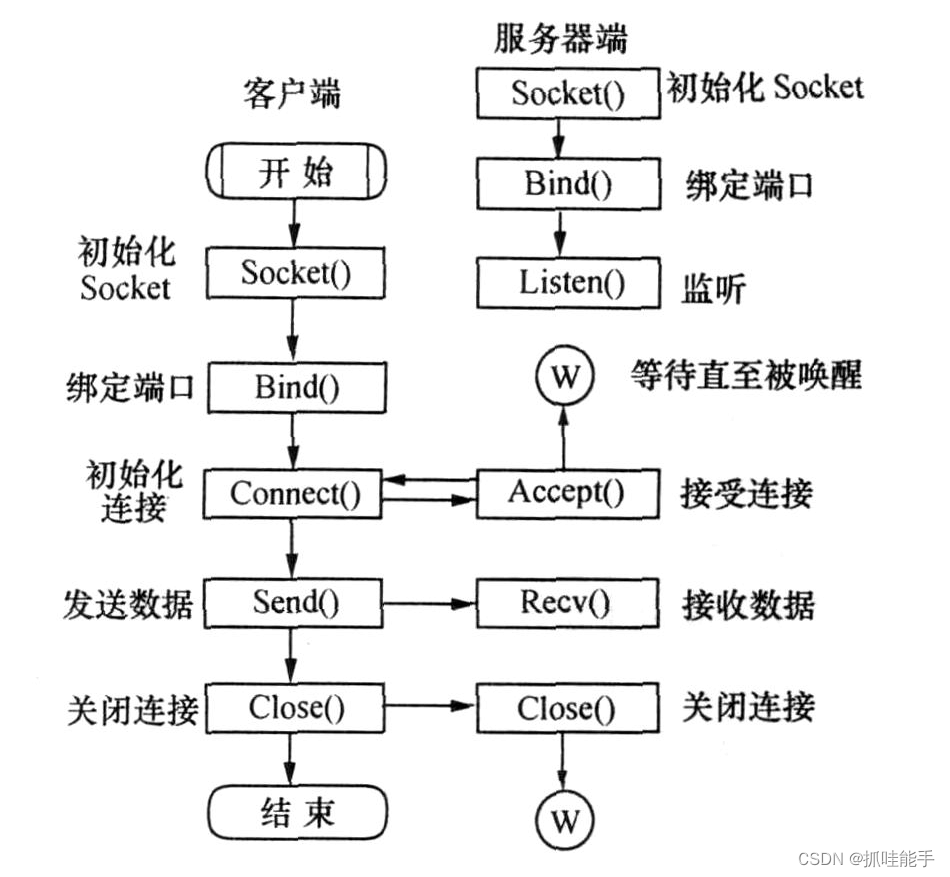
Linux网络编程(socket)
1. 概念 局域网和广域网 局域网:局域网将一定区域内的各种计算机、外部设备和数据库连接起来形成计算机通信的私有网络。广域网:又称广域网、外网、公网。是连接不同地区局域网或城域网计算机通信的远程公共网络。 IP(Internet Protocol&a…...
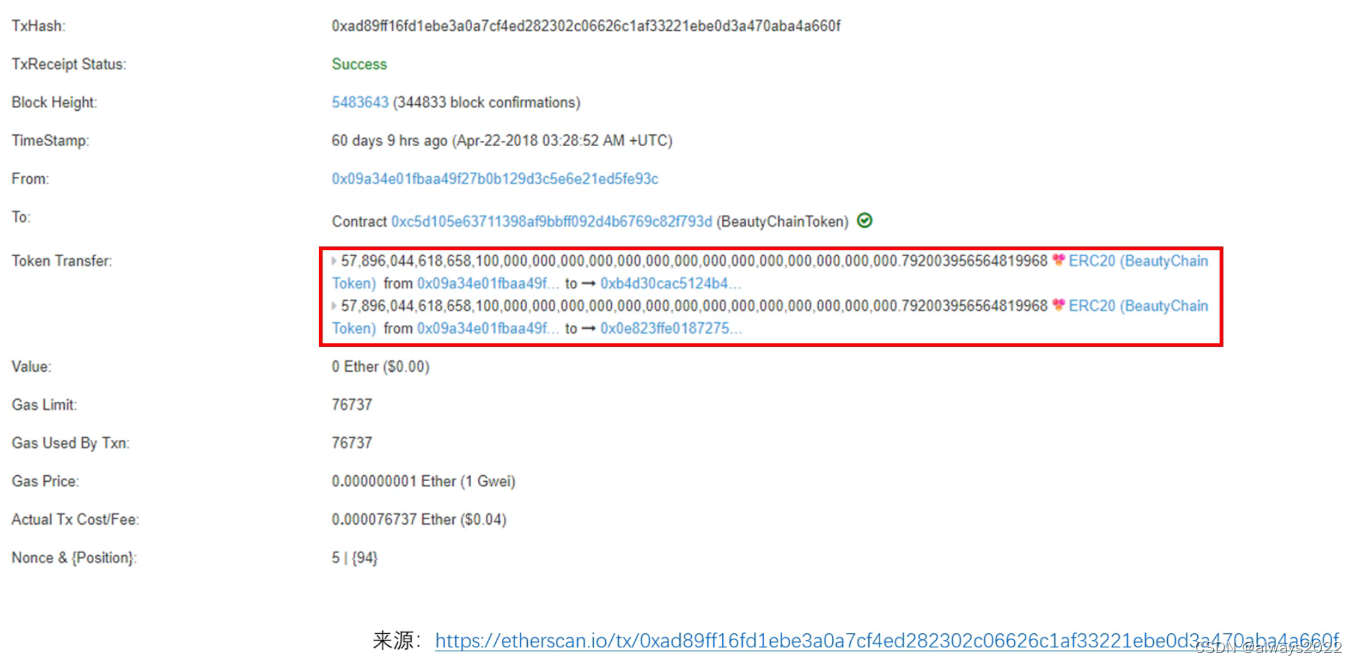
以太坊(3)——智能合约
智能合约 首先明确一下几个说法(说法不严谨,为了介绍清晰才说的): 全节点矿工 节点账户 智能合约是基于Solidity语言编写的 学习Solidity语言可以到WFT学院官网(Hello from WTF Academy | WTF Academy)…...

【Python设计模式03】简单工厂模式
简单工厂模式(Simple Factory Pattern)是一种创建型设计模式,它通过专门定义一个工厂类来负责创建其他类的实例,而不是在客户端代码中直接实例化对象。这样可以将对象创建的过程与使用对象的过程分离,提高代码的可维护…...

java中的Collections类+可变参数
一、概述 Collections类是集合类的工具类,与数组的工具类Arrays类似 二、可变参数(变:数量) 格式:参数类型名...参数,可变参数就是一个数组 注意:可变参数必须放在参数列表的最后并且一个参数列表只能有一个可变参…...

SpringBoot集成腾讯云敏感词校验API流程
1.pom.xml中引入腾讯云jar配置信息 <dependency><groupId>com.tencentcloudapi</groupId><artifactId>tencentcloud-sdk-java</artifactId><version>4.0.11</version> </dependency> 2.application.yaml中添加配置 tencent…...

工业机器视觉工控机选型指南:从硬件配置到现场调试
1. 产品定位与核心价值解析在工业自动化领域,尤其是机器视觉应用场景中,稳定、可靠且性能强劲的硬件平台是整套系统能够7x24小时无间断运行的基石。朗锐智科推出的这款机器视觉工控机,从其核心配置来看,精准地瞄准了中高端视觉检测…...
)
【独家首发】保险业首个AI Agent成熟度评估模型(5级量化标准+12项KPI基线数据)
更多请点击: https://intelliparadigm.com 第一章:【独家首发】保险业首个AI Agent成熟度评估模型(5级量化标准12项KPI基线数据) 该模型由国内头部保险科技联合实验室历时18个月实证研发,首次将AI Agent在核保、理赔、…...

用磅蛋糕类比理解神经网络:零基础学AI的具象化教学法
1. 项目概述:当神经网络遇上磅蛋糕——这不是比喻,是教学法的底层重构“Neural Networks With Pound Cakes and a Little Math”这个标题一出现,我就在咖啡馆里笑出了声。不是因为它轻浮,恰恰相反——它精准戳中了当前AI科普最顽固…...

告别手动抓瞎:用vmp3-import-fix-x86和Universal Import Fixer搞定VMP3.5壳的IAT修复
VMP3.5壳IAT修复的高效工具链实践指南 逆向工程领域里,VMProtect始终是令人又爱又恨的存在。特别是3.5版本引入的IAT混淆机制,让不少安全研究员在深夜调试时抓狂。传统手动修复不仅耗时耗力,还容易遗漏关键调用。经过多次实战验证࿰…...

如何快速掌握高效屏幕标注:终极免费工具完全指南
如何快速掌握高效屏幕标注:终极免费工具完全指南 【免费下载链接】ppInk Fork from Gink 项目地址: https://gitcode.com/gh_mirrors/pp/ppInk 你是否曾在在线会议中手忙脚乱地试图解释屏幕上的内容?或者作为教师,想要在虚拟课堂上生动…...

Realsense D435i相机标定避坑指南:从棋盘格准备到OpenCV立体校正全流程
Realsense D435i相机标定实战:从硬件配置到立体校正的完整避坑手册 在三维视觉和机器人领域,相机标定是构建精准感知系统的基石。Intel Realsense D435i作为一款广泛使用的深度相机,其标定质量直接影响着SLAM、三维重建等应用的精度。本文将分…...

C 语言自定义类型:结构体、位段、联合体、枚举
struct:成员并排,空间叠加位段:struct 里按 bit 分配,极致省空间union:成员重叠,空间共享enum:有限常量,替代宏,更安全一、结构体 struct:成员并排࿰…...

HC-05蓝牙模块连接Arduino/STM32的实战避坑指南:从3.3V/5V电平匹配到手机APP调试全流程
HC-05蓝牙模块连接Arduino/STM32的实战避坑指南:从3.3V/5V电平匹配到手机APP调试全流程 当你第一次尝试将HC-05蓝牙模块连接到Arduino或STM32开发板时,可能会遇到各种令人沮丧的问题:模块不响应、手机搜索不到设备、数据传输不稳定。这些问题…...

5个理由让你立即尝试ImStudio:实时GUI布局设计器
5个理由让你立即尝试ImStudio:实时GUI布局设计器 【免费下载链接】ImStudio GUI layout designer for Dear ImGui 项目地址: https://gitcode.com/gh_mirrors/im/ImStudio ImStudio是一个基于Dear ImGui的实时GUI布局设计器,专为游戏开发者和应用…...

Shader Graph边缘光原理与实战:从菲涅尔效应到世界空间法线
1. 为什么边缘光不是“加个描边”那么简单——从美术需求到Shader本质的错位“给模型加个边缘光”,听起来像Unity编辑器里拖个组件、点几下鼠标就能搞定的事。我第一次接到这个需求时,美术同学在评审会上甩出一张《原神》角色截图,指着雷电将…...