机械臂与Realsense D435 相机的手眼标定ROS包
本教程主要介绍机械臂与 Realsense D435 相机手眼标定的配置及方法。
系统:Ubuntu 20.0.4
◼ ROS:Noetic
◼ OpenCV 库:OpenCV 4.2.0
◼ Realsense D435:librealsense sdk(2.50.0)、realsense-ros 功能包(2.3.2)
◼ Marker 标记识别:Aruco 功能包
◼ 手眼标定:easy_handeye 功能包
◼ Moveit!
◼ 机械臂 ROS 功能包(根据不同型号机械臂提供配套的 ROS 包,使用方法基本相同)
一、概述
手眼标定分两种情况:
Eye-to-hand 眼在手外:标定的是相机坐标系相对于机器人基座坐标系的位姿。
Eye-in-hand 眼在手上:标定的是相机坐标系相对于机器人工具坐标系的位姿
本教程主要介绍 Realsense D435 相机安装在机械臂外部即眼在手外的标定方法。
二、下载标定需要的ros包
1、aruco_ros包
mkdir eye_out_hand/src && cd eye_out_hand/src
//下载noetic版本的
git clone https://github.com/pal-robotics/aruco_ros.git
2、easy_handeye包
git clone https://github.com/IFL-CAMP/easy_handeye.git3、realsense-ros包
//下载ros1版本的
git clone https://github.com/IntelRealSense/realsense-ros.git4、机械臂控制包
用自己对应的机械臂控制ros包就可以了。
三、打印 Marker 标签
标定需要使用到的 Marker 标签,可以在 aruco_ros 包中找到提供好的 marker 标签进
行打印,如图:
也可以到下面的网站下载maker标签并打印出来: Online ArUco markers generator
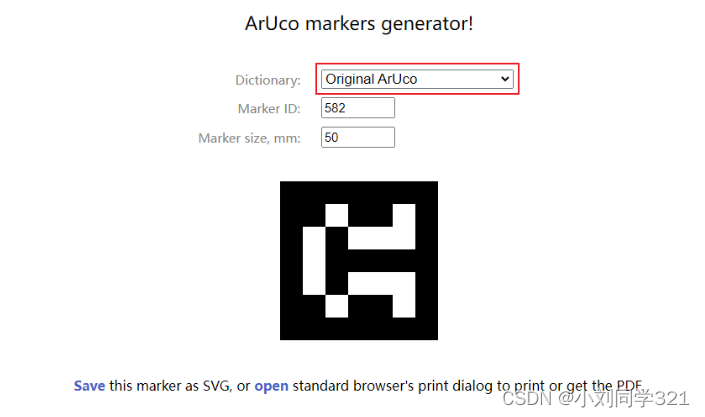 注意:打印时,要选择原始大小,否则要测量一下打印出来的真实大小。
注意:打印时,要选择原始大小,否则要测量一下打印出来的真实大小。
四、修改ros包的配置
1、配置 aruco_ros 的 launch 文件
在 aruco_ros 功能包的 launch 目录下拷贝一份原有的 single.launch 文件,自己命一个名字,按下面的步骤修改里面的内容:
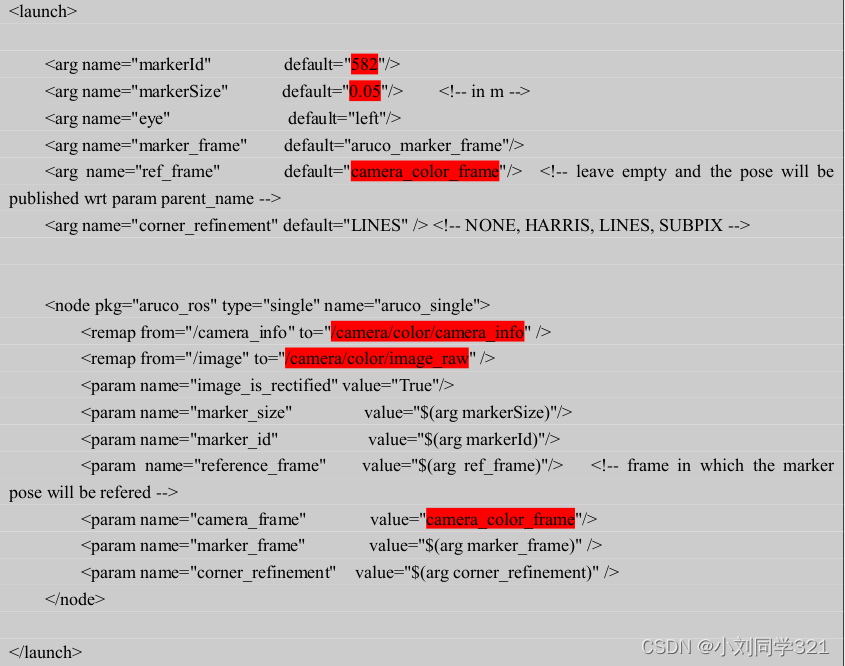
markerId:使用的 Marker 标签的 ID,这里在准备时打印的 Marker 标签 ID 为 582
markerSize:Marker 标签的实际大小,单位为 m,这里在准备时打印的 Marker 标签实际大小为 5 厘米即 0.05m
ref_frame:参考坐标系名称,这里选择 Realsense 的 camera_color_frame 作为参考坐标系
<remap from="/camera_info" to="/camera/color/camera_info" />:将/camera_info 重映射为对应 Realsense实际发布的相应的 Topic 即/camera/color/camera_info
<remap from="/image" to="/camera/color/image_raw" />:将/image 重映射为对应 Realsense 实际发布的相应的 Topic 即/camera/color/image_raw
camera_frame:相机坐标系,修改为实际的相机坐标系 camera_color_frame
2、配置 easy_handeye 标定的 launch 文件
在 easy_handeye 功能包的 launch 目录下新建一个eye_in_hand_calibrate.launch文件。在里面添加
<?xml version="1.0" ?>
<launch><!-- 生成标定文件的名称 --><arg name="namespace_prefix" default="rm_rs_d435" /><!-- 机械臂 MoveIt!配置的 move_group 为 arm,所以修改为 arm --><arg name="move_group" default="arm" /> <!-- start easy_handeye --><include file="$(find easy_handeye)/launch/calibrate.launch" ><arg name="namespace_prefix" value="$(arg namespace_prefix)" /><arg name="move_group" value="$(arg move_group)" /><!-- 这里使用眼在手上的方式进行标定,所以此处改成 true --><arg name="eye_on_hand" value="true" /><!--tracking_base_frame 为 realsense 的相机坐标系--><arg name="tracking_base_frame" value="camera_color_frame" /><!--tracking_marker_frame 对应 aruco_ros 包中 single_realsense.launch 中的 marker_frame 的值--><arg name="tracking_marker_frame" value="aruco_marker_frame" /><!--robot_base_frame 为机器人基座坐标系--><arg name="robot_base_frame" value="base_link" /><!--robot_effector_frame 为工具坐标系,如夹爪,吸盘等--><arg name="robot_effector_frame" value="Link6" /><arg name="freehand_robot_movement" value="false" /><arg name="robot_velocity_scaling" value="0.5" /><arg name="robot_acceleration_scaling" value="0.2" /></include>
</launch>五、开始标定
1、编译
cd ~/catkin_ws
catkin build2、启动 Realsense 节点
cd ~/catkin_ws
source devel/setup.bash
roslaunch realsense2_camera rs_camera.launch 
3、启动aruco_ros节点识别maker标签
cd ~/catkin_ws
source dev/setup.bash
roslaunch aruco_ros single.launch
你可以打开一个新的终端,执行以下命令启动 image_view 订阅/aruco_single/result 显示图像:
cd ~/catkin_ws
source dev/setup.bash
rosrun image_view image_view image:=/aruco_single/result4、启动你的机械臂控制节点
根据你自己的机械臂控制功能包,运行就可以了。
5、启动 easy_handeye 手眼标定节点
cd ~/catkin_ws
source dev/setup.bash
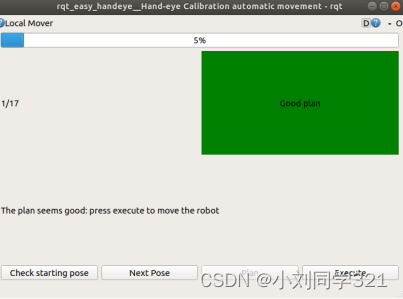
roslaunch easy_handeye eye_in_hand_calibrate.launch 成功运行后,会同时打开三个界面: 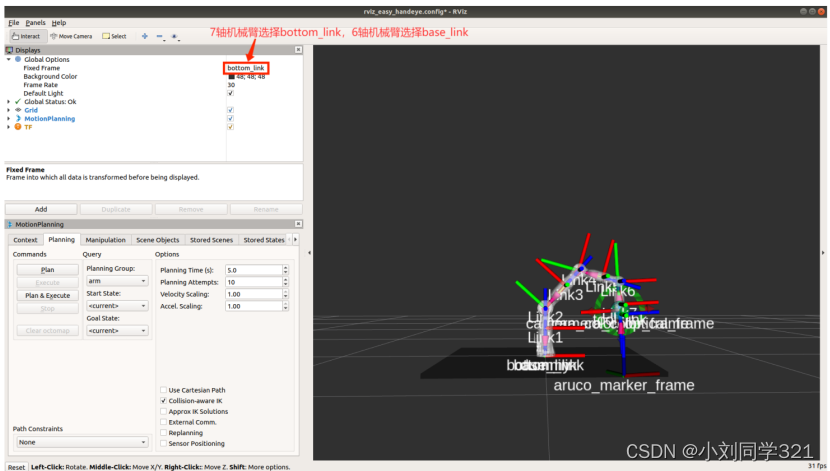

标定步骤:
a、在图3 中,点击 Check starting pose,稍微等待,若检查成功,界面会出现:0/17,Ready to start,如下图所示(如果检测失败或者没有出现 0/17,则说明当前机械臂的姿态不合适,可能有规划不可达,需要关闭标定节点然后调节机械臂到一个合适姿态并将 aruco 二维码移动至相机视野中心处附近再重启启动标定节点继续标定):
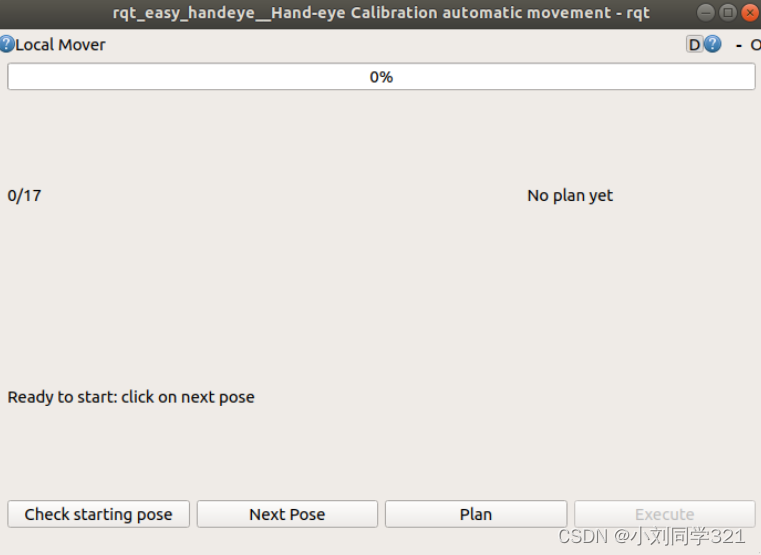
b、在图3中依次点击 Next Pose,Plan,Execute,机械臂会移动至新的位置,若二维码完全的在相机视野范围内,且能检测成功,则进行下一步,若二维码不在相机视野范围内或部分在视野外,检测不到,则再次依次点击 Next Pose,Plan,Execute,直到二维码完全在相机视野范围内,且能检测成功,再进行下一步,如下图所示:
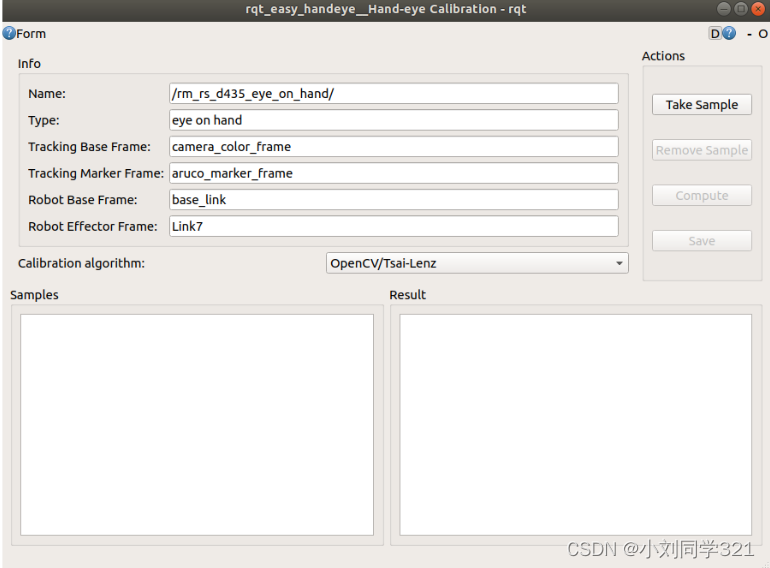
c、在图2 中点击 Take Sample,若 Samples 对话框中出现有效信息,说明第一个点标定成功 
d、重复执行步骤 2 和步骤 3,直至 17 个点全部标定完毕
e、在图2 中点击 Compute,则 Result 对话框中会出现结果,点击Save,会将结果保存为一个 YAML 文件,路径为 ~/.ros/easy_handeye
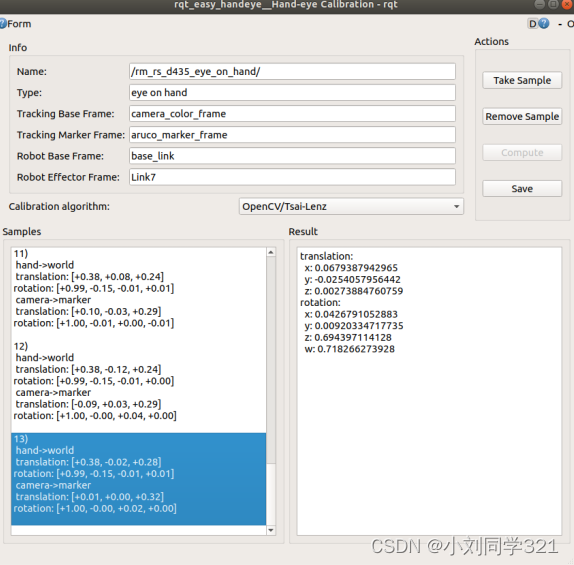
标定完成!!!!!!
相关文章:
机械臂与Realsense D435 相机的手眼标定ROS包
本教程主要介绍机械臂与 Realsense D435 相机手眼标定的配置及方法。 系统:Ubuntu 20.0.4 ◼ ROS:Noetic ◼ OpenCV 库:OpenCV 4.2.0 ◼ Realsense D435:librealsense sdk(2.50.0)、realsense-ros 功能包&…...
ubuntu使用记录——如何使用wireshark网络抓包工具进行检测速腾激光雷达的ip和端口号
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言wireshark网络抓包工具1.wireshark的安装2.wireshark的使用3.更改雷达ip 总结 前言 Wireshark是一款备受赞誉的开源网络协议分析软件,其功能之强大…...

C#学习指南:重要内容与实用技巧
学习C#编程是一段充满挑战但又非常充实的旅程。以下是我在学习过程中积累的一些经验,希望能对大家有所帮助。 一、掌握基础概念 类及其成员 C#中的类是编程的基础模块。理解类的结构、属性、方法和构造函数是至关重要的。每个类都有其特定的功能,学会如…...
什么意思)
display(a,b)什么意思
在Python中,如果你看到display(a,b)这样的代码,它通常意味着有人正在使用IPython.display模块中的display函数来同时显示两个对象。 IPython.display是Jupyter Notebook和JupyterLab等交互式计算环境的一部分,它提供了一种在笔记本中显示各种…...
SpringBoot3整合阿里云短信服务-1(配置阿里云短信服务)
SpringBoot3整合阿里云短信服务-1(配置阿里云短信服务) 一、开通阿里云短信服务 阿里云官网:阿里云官网 选择产品中企业服务与云通信中的短信服务 选择免费开通 选择快速学习和测试 根据这几个全部配置一下我这里是配置好了所以学习进度是100% 1.1 添加资质 首先选择新增资质 …...

基于HAL库控制LED流水灯
一. 了解并掌握HAL库函数开发方法。安装 stm32CubeMX,配合Keil,使用HAL库方式完成下列任务: 1、重做上一个LED流水灯作业,用GPIO端口完成2只LED灯的周期闪烁。 2、接上,再用GPIO端某一管脚接一个开关(用杜邦…...
利用kubeadm安装k8s集群 以及跟harbor私有仓库下载镜像
目录 环境准备 master(2C/4G) 192.168.88.3 docker、kubeadm、kubelet、kubectl、flannel node01(2C/2G) 192.168.88.4 docker、kubeadm、kubelet、kubectl、flannel node02(…...

明天(周六)下午!武汉Linux爱好者线下沙龙,我们在华中科技大学等你!
2024 年 5月 25 日(周六)下午,我们将在「武汉市洪山区」 珞喻路 1037 号华中科技大学南五楼 613 室举办武汉 Linux 爱好者线下沙龙(WHLUG),欢迎广大 Linux 爱好者来到现场,与我们一同交流技术&a…...
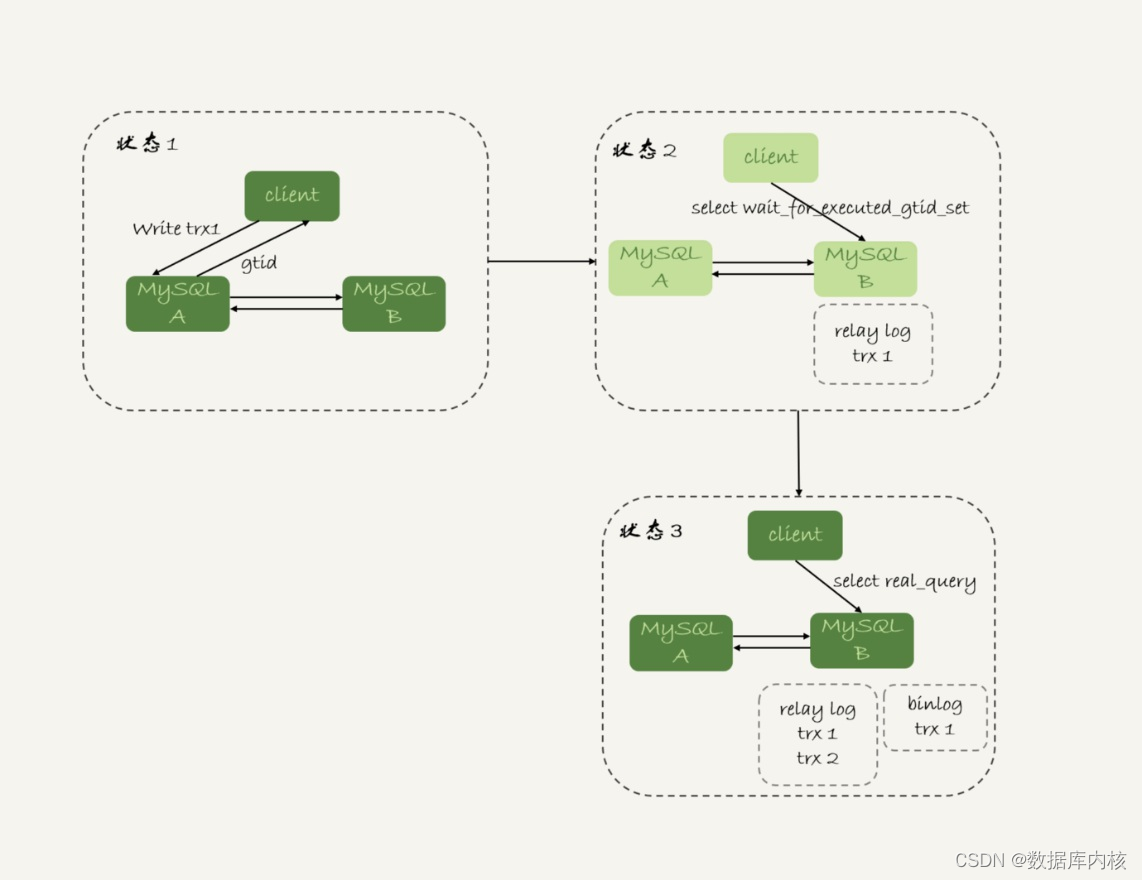
MySQL主从复制(五):读写分离
一主多从架构主要应用场景:读写分离。读写分离的主要目标是分摊主库的压力。 读写分离架构 读写分离架构一 架构一结构图: 这种结构模式下,一般会把数据库的连接信息放在客户端的连接层,由客户端主动做负载均衡。也就是说由客户…...
)
阿里巴巴 EasyExcel 真正的高效与通用导入(亿级数据秒级导入)
需要lombok、hutool、alibaba EasyExcel 相关依赖包 基于Lamba表达式的通用监听器 import cn.hutool.core.util.StrUtil; import com.alibaba.excel.context.AnalysisContext; import com.alibaba.excel.event.AnalysisEventListener; import lombok.experimental.UtilityClass…...

32.5k star!!替换 postman?【送源码】
在软件开发过程中,API(应用程序接口)扮演着至关重要的角色。为了确保 API 的可靠性和性能,开发人员需要一种高效的方式来测试和调试它们。这方面的工具,大家经常用到的应该就是 postman 了。不过,今天了不起…...

课时135:awk实践_逻辑控制_综合实践
1.3.8 综合实践 学习目标 这一节,我们从 网络实践、文件实践、小结 三个方面来学习 网络实践 简介 所谓的网络实践,主要是借助于awk的数组功能,进行站点的信息统计操作。准备网络环境 安装软件 yum install nignx -y重启nginx [rootloca…...

c++ 读取MNIST数据集实现softmax回归
pytorch教材 3.4. softmax回归 — 动手学深度学习 2.0.0 documentation c实现代码 代码太长了就没整理了,也暂时没有运行效果截图 同样没有本文也没有实现反向自动求导 超长代码警告,757行。不过可能注释占一半 #include <bits/stdc.h> usin…...

JS-04何为继承以及实现方式
目录 1 JS中继承的概念 2 为什么要使用继承?-解决内存浪费 2.1 问题引入 2.2 问题解决 2.3 拓展 3 继承的实现方式 3.1 原型链继承 1 3.2 原型链继承 2 1 JS中继承的概念 通过【某种方式】让一个对象可以访问到另一个对象中的属性和方法,我们把这种…...
6款网站登录页(附带源码)
6款网站登录页 效果图及部分源码123456 领取源码下期更新预报 效果图及部分源码 1 部分源码 <style>* {margin: 0;padding: 0;}html {height: 100%;}body {height: 100%;}.container {height: 100%;background-image: linear-gradient(to right, #fbc2eb, #a6c1ee);}.l…...

spring boot打的包直接运行
Spring Boot 提供了一个插件 spring-boot-maven-plugin 把程序打包成一个可执行的jar包,直接执行java -jar xxx.jar即可以启动程序 1、引用 spring-boot-maven-plugin插件 <build><plugins><plugin><groupId>org.springframework.boot<…...

移除元素-力扣
第一种解法,暴力解法,使用两个for循环一个进行遍历,一个进行覆盖,代码如下: class Solution { public:int removeElement(vector<int>& nums, int val) {int size nums.size();for(int i 0; i < size; …...

代码随想录算法训练营第三天| 203.移除链表元素、 707.设计链表、 206.反转链表
203.移除链表元素 题目链接: 203.移除链表元素 文档讲解:代码随想录 状态:没做出来,做题的时候定义了一个cur指针跳过了目标val遍历了一遍链表,实际上并没有删除该删的节点。 错误代码: public ListNode re…...

【题解】AB33 相差不超过k的最多数(排序 + 滑动窗口)
https://www.nowcoder.com/practice/562630ca90ac40ce89443c91060574c6?tpId308&tqId40490&ru/exam/oj 排序 滑动窗口 #include <iostream> #include <vector> #include <algorithm> using namespace std;int main() {int n, k;cin >> n &…...

LSPatch免root手机模块应用
软件介绍 LSPatch是一款免root手机模块应用,兼容大部分机型,使用LSPatch,您可以个性化您的Android设备,添加新的功能,修改系统设置,甚至完全改变系统的外观。您可以根据自己的需求选择和安装各种Xposed模块…...

告别道路预测老套路:用ParkPredict+模型思路,解决停车场里的‘鬼探头’难题
破解泊车场景预测困局:ParkPredict模型的技术革新与实践停车场里的每一次转向、倒车和避让,都是对自动驾驶系统预测能力的极限挑战。与开放道路的规则明确不同,这里没有清晰的车道线指引,没有统一的行驶方向,只有随时可…...

Agent开发面试通关攻略:吃透稳拿offer
阅读前置:2026年当下最卷也最缺人的AI岗位,一定是AI Agent开发。最近刷遍CSDN、牛客、力扣最新面经,发现一个非常明显的招聘趋势:普通大模型微调岗位饱和内卷,而AI Agent开发岗位人才严重缺口,薪资更高、竞…...
)
告别外部中断!用EnableInterrupt库轻松搞定Arduino Nano多通道PWM读取(附完整代码)
Arduino Nano多通道PWM读取实战:用EnableInterrupt突破硬件限制当你用Arduino Nano开发四轴飞行器或机器人项目时,是否遇到过这样的尴尬:遥控器的四个通道PWM信号需要同时读取,但Nano只有两个外部中断引脚?这个问题困扰…...

《我看见的世界:李飞飞自传》第1-6章阅读笔记:从移民少女到AI教母的“看见“之旅
前言 当我们谈论人工智能时,我们谈论的是算法、数据、算力,是那些冰冷的代码和复杂的模型。但在《我看见的世界:李飞飞自传》中,李飞飞用她独特的视角告诉我们:AI的本质,是人类对"看见"世界的渴望…...

WarcraftHelper终极指南:深度解析魔兽争霸III现代化兼容性解决方案
WarcraftHelper终极指南:深度解析魔兽争霸III现代化兼容性解决方案 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHelper是一款专…...

LeagueAkari:英雄联盟终极自动化助手革命性指南
LeagueAkari:英雄联盟终极自动化助手革命性指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 你是否在英雄联盟游戏中反复经历这…...

LPCM框架:大模型驱动的计算机架构设计革命
1. LPCM框架:计算机系统架构设计的范式革命计算机系统架构设计正站在历史性的转折点上。过去八十年来,从ENIAC的真空管到现代7纳米制程的异构计算芯片,架构设计始终遵循着"专家经验EDA工具"的传统范式。但随着摩尔定律逼近物理极限…...

Java项目中如何提升整体系统性能?
性能优化可以说是我们程序员的必修课,如果你想要跳出CRUD的苦海,成为一个更“高级”的程序员的话,性能优化这一关你是无论无何都要去面对的。为了提升系统性能,开发人员可以从系统的各个角度和层次对系统进行优化。除了最常见的代…...

如何快速定制Office界面:终极开源工具使用指南
如何快速定制Office界面:终极开源工具使用指南 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbonx-editor O…...

在数据预处理与分析流水线中集成大模型API进行智能标注与摘要
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在数据预处理与分析流水线中集成大模型API进行智能标注与摘要 对于数据工程师而言,处理海量非结构化文本数据是一项常见…...