pygame7 弹球游戏2
上节课我们做到当球静止下来后在第0号球上画一个球杆
本节课我们将会让这个球杆将球打出来
1、鼠标事件
pygame.mouse.get_pressed():返回鼠标左键,中间,右键的情况
2、键盘事件:
pygame.key.get_pressed(): 返回所有键盘的情况
3、pygame.Rect:
pygame提供的矩形类,这个类我们在之前有学过,这次主要是用到其初始化的功能
rect = Rect(x,y, width, height)
当我们希望将球击打时,实际是需要将球的速度改为一个不为0的数。可以用从球中心到鼠标点的距离作为一个参考量
def draw_and_wait_hit(self):# 旧代码略if pygame.mouse.get_pressed()[0]: # 鼠标左键被按下self.speed[0] = (self.rect.center[0] - pos[0]) * 0.1self.speed[1] = (self.rect.center[1] - pos[1]) * 0.1这样当鼠标左键按下时,球就被打出来了,由于平常的速度在2至4左右,这个计算出来的距离有点大,我们取其中的十分之一作为速度
走到这一步发现球是击出去了,但击到另外的球上,被撞击的球文丝不动。
原因是被撞的球此时速度已经为0了,此时再怎么取返,速度都为0,因此需要重新考虑。
当速度接近0时,使用撞击球的速度取反
这样,我们改一个crash
def crash(self, groups):if pygame.sprite.spritecollide(self, groups, False):if abs(self.speed[0]) > 1:self.speed[0] = -self.speed[0]else:self.speed[0] = -groups[0].speed[0]if abs(self.speed[1]) > 1:self.speed[1] = -self.speed[1]else:self.speed[1] = -groups[0].speed[1]当球的速度接近0,就采用撞击的球的相反速度
然后我们发现当A撞击B,B撞C时,新的情况出现了,B和C在那不断抖动,猜想可能是撞击完后没能实现各自的速度取返。
所以我们需要在全部碰撞完成后,调整各球的速度,使他们彼此为反
def adjust(self, groups):if pygame.sprite.spritecollide(self, groups, False):if (self.speed[0] > 0 and groups[0].speed[0] > 0) or (self.speed[0] < 0 and groups[0].speed[0] < 0):self.speed[0] = -self.speed[0]if (self.speed[1] > 0 and groups[0].speed[1] > 0) or (self.speed[1] < 0 and groups[0].speed[1] < 0):self.speed[1] = -self.speed[1]然后在后面针对每一个球做一次调整:
while True:# 略for i in range(len(balls)):for j in range(len(balls)):if i == j:continueballs[i].adjust([balls[j]])至此A撞B,B撞C就不会贴在一起不断抖动了
做一个球洞比较简单,直接在while True中用circle画一个黑色的圆即可,当然,在此之前我们要思考洞的位置,可放在右下角,用到pygame为我们提供的Rect
circle_rect = Rect(width-100, height-100, 100, 100)
然后在While中画出圆:
pygame.draw.circle(screen, [0, 0, 0], circle_rect.center, 50, 0)
怎样表示球进洞呢,通过Rect有一个contains可以判断一个矩形是否包含另一个矩形,我们可以将小球中心点构造成一个小矩形出来
rect = pygame.Rect(self.rect.center[0], self.rect.center[1], 1, 1)
然后判断黑色的圆形是否包含rect:
if circle_rect.contains(rect):
一旦发现黑色的圆包含某个小球的球心,我们可以将小球显示置为False,只有在小球显示为真时才可以显示小球
至此小球进洞就完成了
补充画一个描准器:
keys = pygame.key.get_pressed()for k in keys:if k:self.show_sighting = not self.show_sightingbreakif self.show_sighting:pos2 = [0, 0]if self.rect.center[0] > pos[0]:pos2[0] = self.rect.center[0] + abs((self.rect.center[0] - pos[0]))else:pos2[0] = self.rect.center[0] - abs((self.rect.center[0] - pos[0]))if self.rect.center[1] > pos[1]:pos2[1] = self.rect.center[1] + abs((self.rect.center[1] - pos[1]))else:pos2[1] = self.rect.center[1] - abs((self.rect.center[1] - pos[1]))最后补上所有代码:
import pygame, sysclass MyBall(pygame.sprite.Sprite):def __init__(self, point, speed):self.image = pygame.image.load("beach_ball.png")self.rect = self.image.get_rect()self.rect.left = point[0]self.rect.top = point[1]self.speed = speedself.show_sighting = Trueself.show = Truedef move(self):if not self.show:returnself.rect = self.rect.move(self.speed)if self.rect.right > width:self.speed[0] = -abs(self.speed[0])if self.rect.left < 0:self.speed[0] = abs(self.speed[0])if self.rect.bottom > height:self.speed[1] = -abs(self.speed[1])if self.rect.top < 0:self.speed[1] = abs(self.speed[1])rect = pygame.Rect(self.rect.center[0], self.rect.center[1], 1, 1)if circle_rect.contains(rect):self.show = not self.showscreen.blit(self.image, self.rect)def dec_speed(self):self.speed[0] = self.speed[0] * 0.995self.speed[1] = self.speed[1] * 0.995def crash(self, groups):if not self.show:returnif pygame.sprite.spritecollide(self, groups, False):if abs(self.speed[0]) > 1:self.speed[0] = -self.speed[0]else:self.speed[0] = -groups[0].speed[0]if abs(self.speed[1]) > 1:self.speed[1] = -self.speed[1]else:self.speed[1] = -groups[0].speed[1]def adjust(self, groups):if pygame.sprite.spritecollide(self, groups, False):if (self.speed[0] > 0 and groups[0].speed[0] > 0) or (self.speed[0] < 0 and groups[0].speed[0] < 0):self.speed[0] = -self.speed[0]if (self.speed[1] > 0 and groups[0].speed[1] > 0) or (self.speed[1] < 0 and groups[0].speed[1] < 0):self.speed[1] = -self.speed[1]def draw_and_wait_hit(self):if abs(self.speed[0]) > 1 or abs(self.speed[1]) > 1:returnpos = pygame.mouse.get_pos()pygame.draw.line(screen, [255, 0, 0], self.rect.center, pos, 10)keys = pygame.key.get_pressed()for k in keys:if k:self.show_sighting = not self.show_sightingbreakif self.show_sighting:pos2 = [0, 0]if self.rect.center[0] > pos[0]:pos2[0] = self.rect.center[0] + abs((self.rect.center[0] - pos[0]))else:pos2[0] = self.rect.center[0] - abs((self.rect.center[0] - pos[0]))if self.rect.center[1] > pos[1]:pos2[1] = self.rect.center[1] + abs((self.rect.center[1] - pos[1]))else:pos2[1] = self.rect.center[1] - abs((self.rect.center[1] - pos[1]))pygame.draw.line(screen, [255, 0, 0], self.rect.center, pos2, 2)if pygame.mouse.get_pressed()[0]:self.speed[0] = (self.rect.center[0] - pos[0])*0.1self.speed[1] = (self.rect.center[1] - pos[1])*0.1pygame.init()
size = width, height = 640, 480
screen = pygame.display.set_mode(size)
balls = []
for i in range(3):ball = MyBall([180 + 180 * i, 180], [4, 4])balls.append(ball)circle_rect = pygame.Rect(width-100, height-100, 100, 100)while True:for event in pygame.event.get():if event.type == pygame.QUIT:sys.exit()screen.fill([255, 255, 255])for i in range(len(balls)):if i == 0:balls[i].draw_and_wait_hit()balls[i].move()balls[i].dec_speed()for i in range(len(balls)):for j in range(len(balls)):if i == j:continueballs[i].crash([balls[j]])for i in range(len(balls)):for j in range(len(balls)):if i == j:continueballs[i].adjust([balls[j]])pygame.draw.circle(screen, [0, 0, 0], circle_rect.center, circle_rect.width/2)pygame.display.flip()pygame.time.delay(20)相关文章:

pygame7 弹球游戏2
上节课我们做到当球静止下来后在第0号球上画一个球杆 本节课我们将会让这个球杆将球打出来 1、鼠标事件 pygame.mouse.get_pressed():返回鼠标左键,中间,右键的情况 2、键盘事件: pygame.key.get_pressed(): 返回所有键盘的情况 3、pyg…...
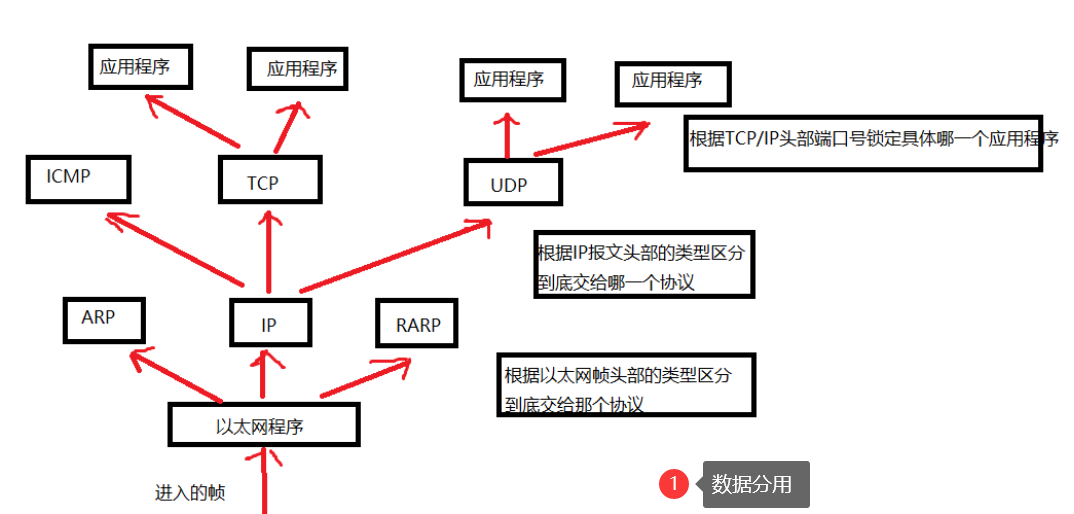
计算机网络4:计算机网络体系结构
目录计算机网络体系结构1.网络模型2.每一层的代表含义2.1 OSI7层模型2.2 五层协议2.3 TCP/IP 四层协议3.数据在各层之间的传输过程4.为什么要进行分层计算机网络体系结构 1.网络模型 2.每一层的代表含义 2.1 OSI7层模型 (1)物理层:比特流–…...
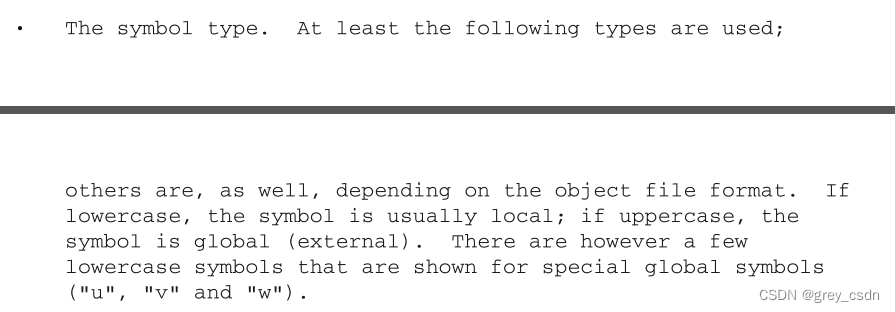
1630_GNU的二进制分析工具nm简单使用探索
全部学习汇总: GreyZhang/toolbox: 常用的工具使用查询,非教程,仅作为自我参考! (github.com) GNU有一套二进制的分析工具,之前是用过objdump的,但是也没有系统掌握。如果做底层软件的设计,这些…...
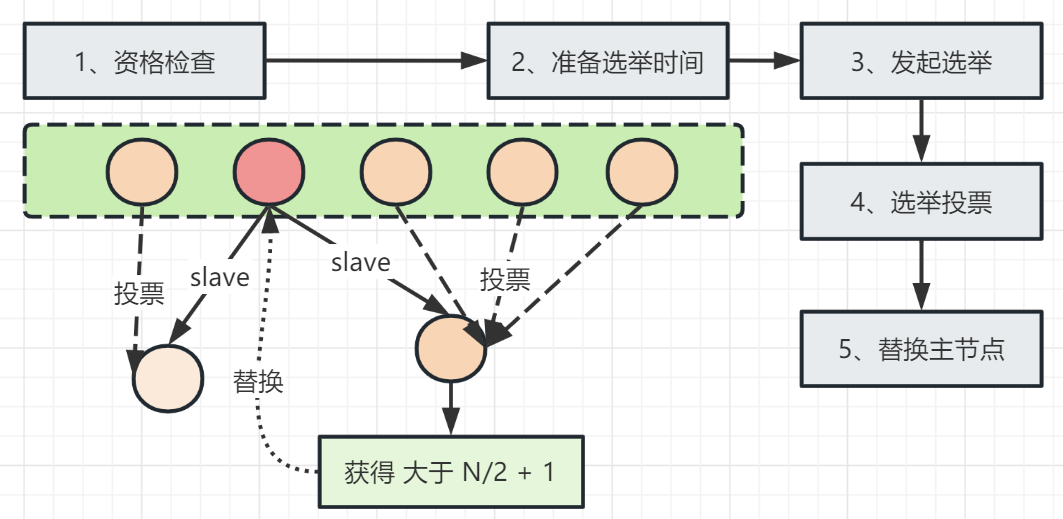
【Redis】Redis高可用之Redis Cluster集群模式详解(Redis专栏启动)
📫作者简介:小明java问道之路,2022年度博客之星全国TOP3,专注于后端、中间件、计算机底层、架构设计演进与稳定性建工设优化。文章内容兼具广度深度、大厂技术方案,对待技术喜欢推理加验证,就职于知名金融公…...
1.8 正则表达式
正则表示式是用来匹配与查找字符串的,从网上爬取数据不可避免的会用到正则表达式。 Python 的表达式要先引入 re 模块,正则表达式以 r 引导。Re库主要功能函数函数说明re.search()在一个字符串中搜索匹配正则表达式的第一个位置,返回match对象…...
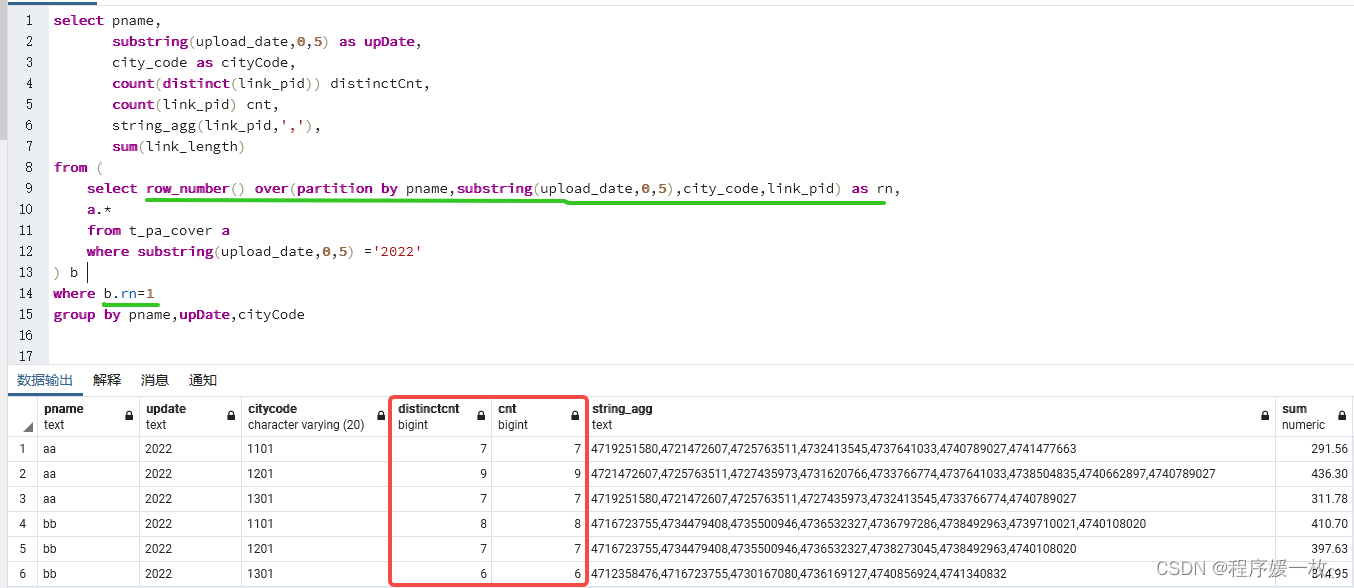
Postgresql 根据单列或几列分组去重row_number() over() partition by
Postgresql 根据单列或几列分组去重row_number() over() partition by 一般用于单列或者几列需要去重后进行计算值的 count(distinct(eid)) 可以 比如有个例子,需要根据名称,城市去筛选覆盖的道路长度,以月因为建立了唯一索引是ok的&#…...
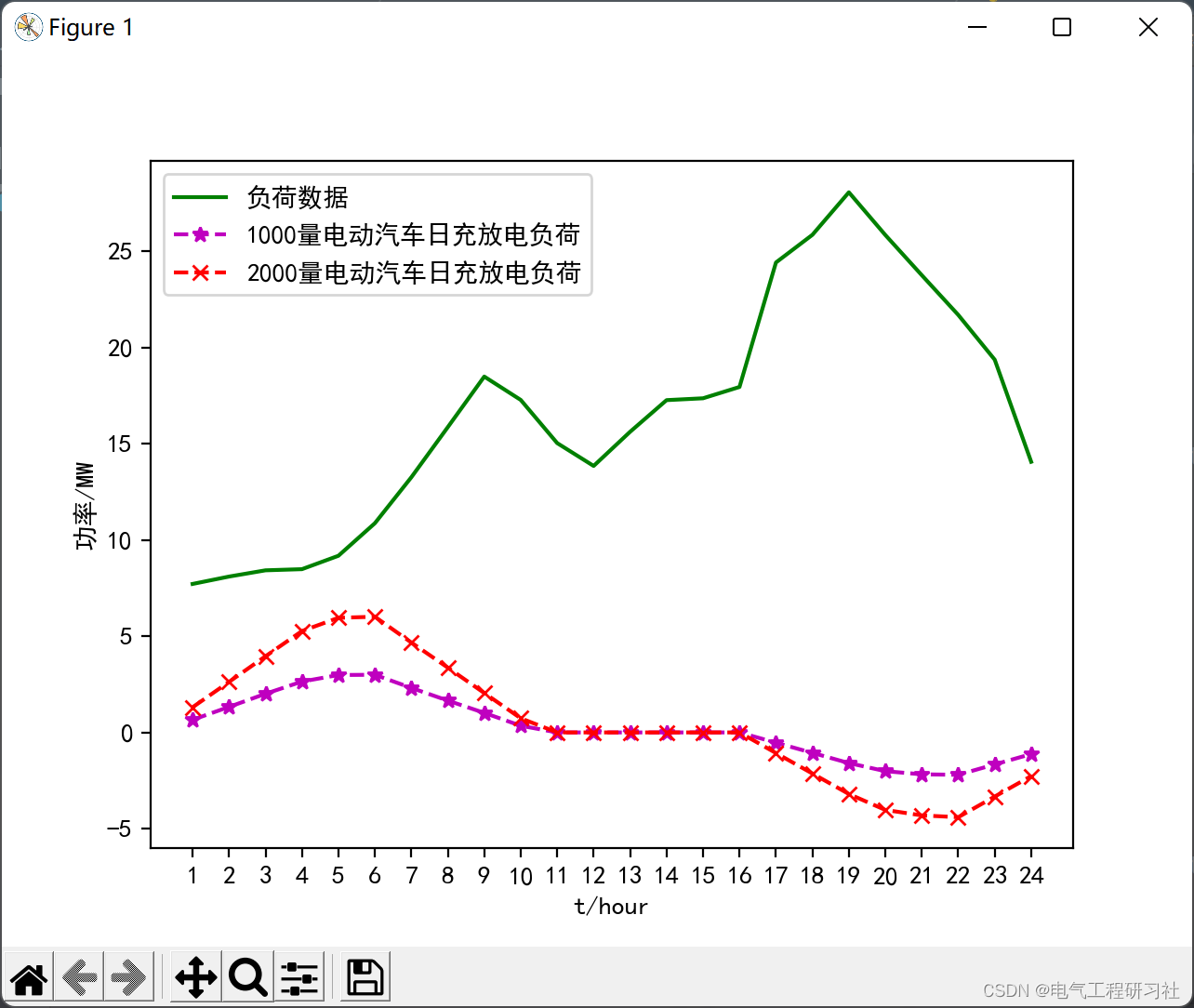
基于蒙特卡洛法的规模化电动车有序充放电及负荷预测(PythonMatlab实现)
💥💥💥💞💞💞欢迎来到本博客❤️❤️❤️💥💥💥 🎉作者研究:🏅🏅🏅主要研究方向是电力系统和智能算法、机器学…...

Selenium常用API详解,从入门到进阶(全套)
目录 1、打开页面 2、查找页面元素 3、输入文本 4、点击操作 5、提交操作 6、清除文本 7、获取文本、属性 8、获取页面的标题和URL 9、窗口 9.1、设置窗口大小 9.2、窗口切换 9.2.1、为什么需要窗口切换? 9.2.2、获取句柄的方式 9.2.3、切换句柄 10、…...

自从学会了Python,我实现了壁纸自由(6)
小朋友们好,大朋友们好!我是猫妹!哈哈哈,又到周末啦!这周过得怎么样?马上就要开学了,寒假作业早已写好了吧?开学让人兴奋,上了很久网课都要吐啦!开学也让人有…...

Ruby 发送邮件 - SMTP
SMTP(Simple Mail Transfer Protocol)即简单邮件传输协议,它是一组用于由源地址到目的地址传送邮件的规则,由它来控制信件的中转方式。 Ruby提供了 Net::SMTP 来发送邮件,并提供了两个方法 new 和 start: new 方法有两个参数&am…...

Python爱心代码
前言 Python漂浮爱心,具体源码见:Python动态爱心代码_爱心代码-Python文档类资源-CSDN下载 爱心类 class Heart(): #每个爱心(爱心类) def __init__(self): self.r ra.randint(10,15) #爱心的半径 …...

【二分查找法及其应用】
文章目录一. 前提二. 基本思路三. 代码实现四. 封装在STL中的二分查找算法五. 浮点数二分一. 前提 待查找的序列是有序的;待查找的 a 采取顺序存储结构。 二. 基本思路 设在升序序列 a [ low…high ] 查找的 k , 首先找中间值 mid a [ ( lowhigh )/2 …...
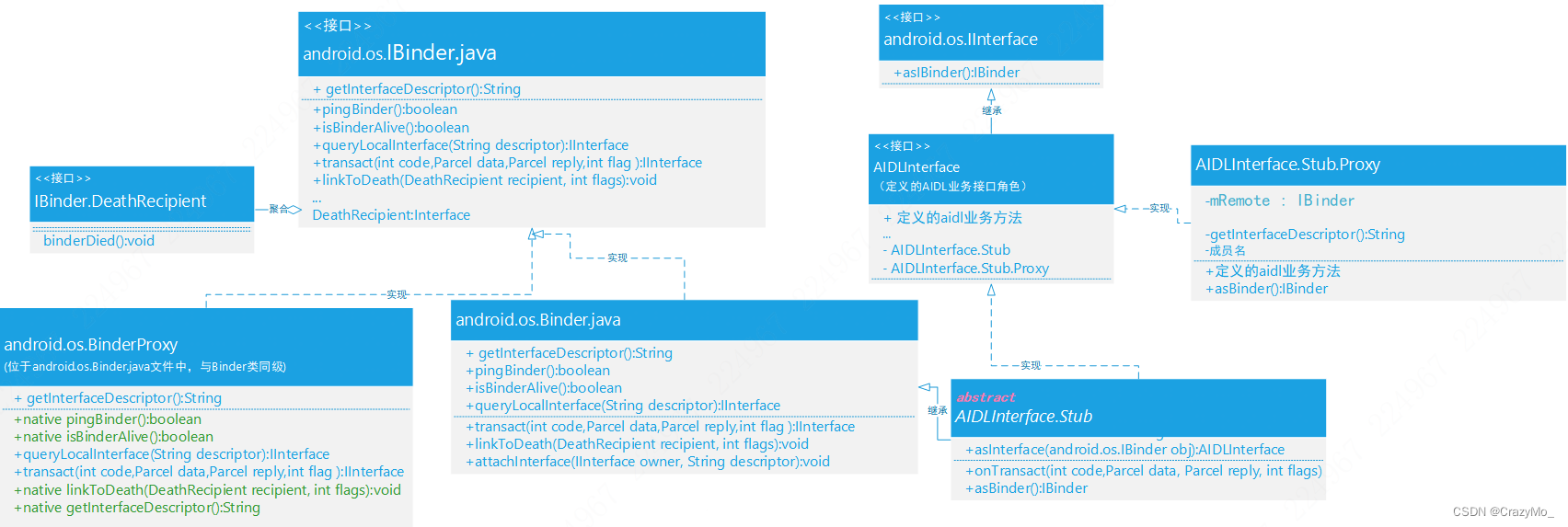
Android 进阶——Framework核心 之Binder Java成员类详解(三)
文章大纲引言一、Binder Java家族核心成员关系图二、Binder Java家族核心成员源码概述1、android.os.IBinder1.1、boolean transact(int code, Parcel data, Parcel reply, int flags) send a call to an IBinder object1.2、String getInterfaceDescriptor()1.3、boolean ping…...

Maven
Maven 1.什么是Maven 官方网站 https://maven.apache.org/ Maven是一款服务于Java平台的自动化构建工具,它可以帮助我们更方便的对项目进行构建、管理项目jar包 ,包括: bulid 项目,切换 jar 版本,添加 jar, 删除 jar 包等 1.…...
1947抓住那头牛(队列 广度优先搜索)
目录 题目描述 解析 解题思路 代码部分 代码部分 运行结果 看看len数组中各个位置的标记值 为什么这样做一定是最短路径: 题目描述 农夫知道一头牛的位置,想要抓住它。农夫和牛都位于数轴上,农夫起始位于点N(0<N<100000)&…...

基于linux5.15.5的IMX 参考手册 ---21
基于linux5.15.5的IMX 参考手册 — 21 10.5.2高清多媒体接口(HDMI)和显示端口(DP)概述 10.5.2.1测试名称 •mxc_cec_test.out 10.5.2.1.1位置 /unit_tests/HDMI/ 10.5.2.1.2功能 验证HDMI CEC功能并向HDMI接收器发送断电命令。 1…...
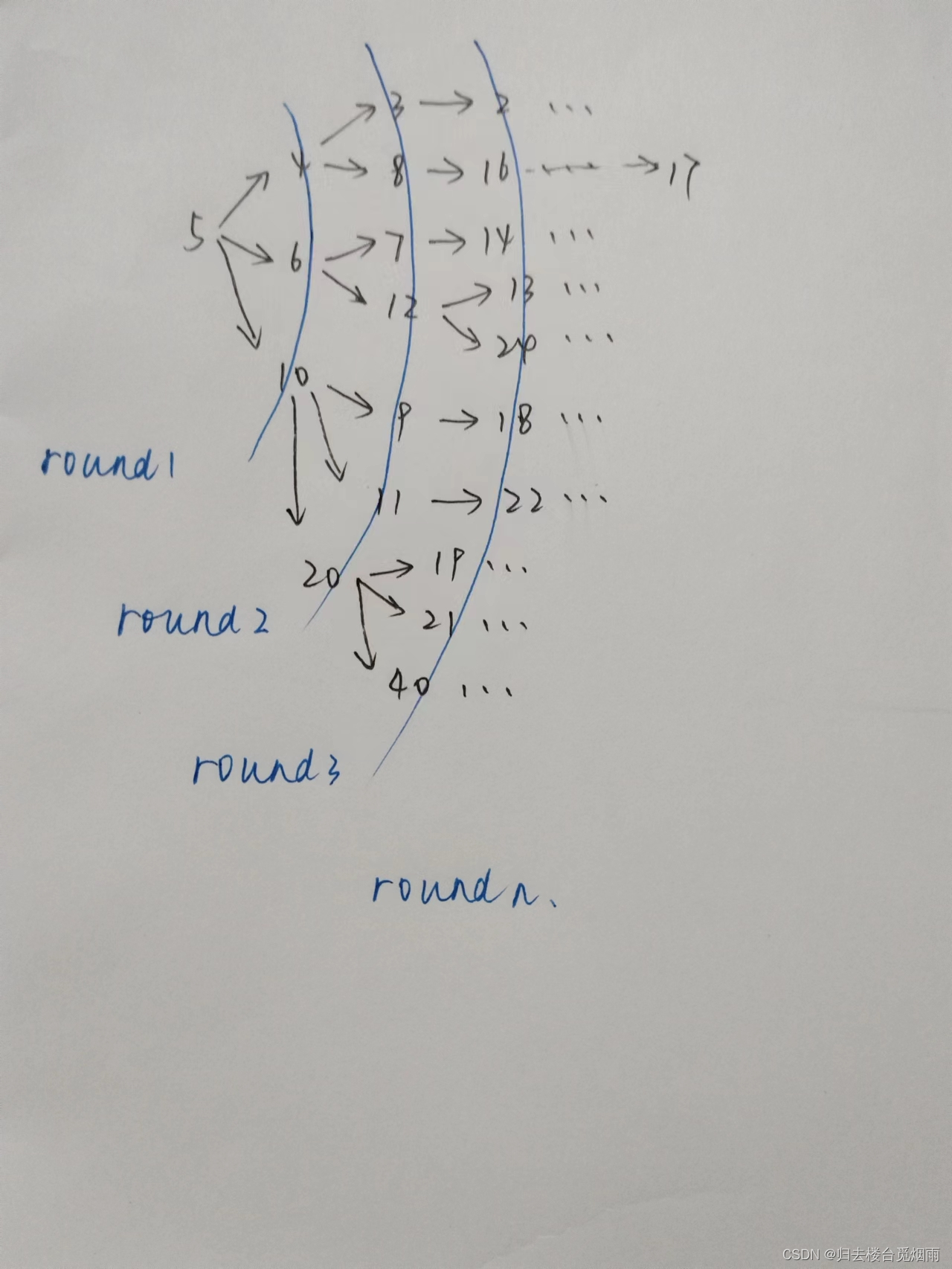
Android Dalvik虚拟机 堆初始化流程
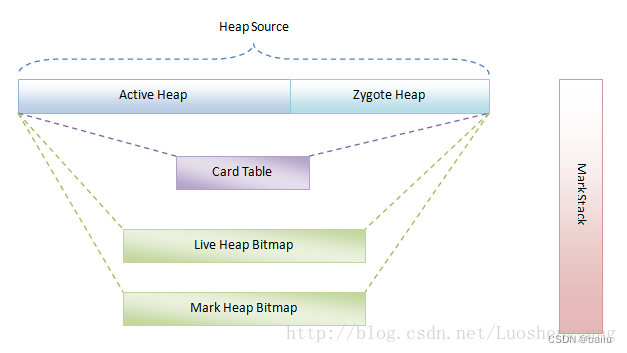
前言 上篇文章介绍了dalvik虚拟机启动流程,在dalvik虚拟机启动时调用了dvmGcStartup来启动堆。 本文介绍我们在日常开发使用Java时的堆创建流程。 Dalvik堆介绍 Dalvik虚拟机中,堆是由heap[0] Active堆和heap[1] Zygote堆两部分组成的。其中ÿ…...
——开发前必备基本常识)
0讲(补)——开发前必备基本常识
前言 专栏内容持续补充更新,目前正在进行优惠活动 目录 前言 一、函数的声明和定义 二、预编译 三、串口打印中的printf函数的使用...

JS学习笔记
1.WebAPIs简介导读Web APIs 和JS 基础关联性JS 基础阶段以及 Web APIs 阶段JS基础学习 ECMAScript 基础语法为后面作铺垫,Web APIs 是JS 的应用,大量使用JS基础语法做交互效果①JS 基础阶段我们学习的是ECMAScript 标准规定的基本语法要求同学们掌握JS 基…...

linux005之用户、组管理
linux用户管理简介: 任何使用linux系统的用户,都必须使用一个合法的账号和密码,账号和密码一般都是超级管理员创建,当然普通用户也可以创建用户,前提是必须拥有创建用户权限。 root是linux系统中默认创建的超级用户 创…...

AI编程助手实战指南:从GitHub Copilot到全流程开发效率提升
1. 项目概述:当AI遇见编码的“氛围感”最近在GitHub上闲逛,发现了一个挺有意思的仓库,叫Sunil6512/awesome-ai-vibe-coding。光看名字,awesome-ai-vibe-coding,就透着一股子新潮味儿。它不是一个具体的工具或者框架&am…...

Cursor SDD Starter:AI驱动开发工作流工程化实践指南
1. 项目概述:一个为工程团队设计的AI驱动开发工作流启动器 如果你和你的团队正在使用Cursor IDE,并且希望将AI辅助开发从一个偶尔使用的“代码补全工具”,升级为一套可预测、可复现、能真正融入团队协作流程的“工程化工作流”,那…...

系统提示、开发提示、用户提示:在 Agent 里怎么分层
系统提示、开发提示、用户提示在 Agent 里的分层架构:从理论到工业级落地全解析 副标题:基于认知科学、软件工程双视角,构建可复用、可调试、高智能的三层提示架构体系 第一部分:引言与基础 (Introduction & Foundation) 1.1 引人注目的标题(重复+锚定SEO) 系统提…...

3PEAK思瑞浦 TPA2772-VS1R MSOP8 运算放大器
特性 供电电压:3V至36V 偏移电压:在25C时最大3.5mV 轨到轨输入和输出 带宽:4.6 MHz 噪声容限:-良好,THD0.0008% 低噪声:1kHz时53nV/vHz 零交叉输入: -优异的总谐波失真加噪声:0.0008%...

Swarmocracy:基于蜂群智能的分布式组织决策模拟实践
1. 项目概述:当开源项目遇上“蜂群民主”最近在开源社区里闲逛,发现一个挺有意思的项目,叫“Swarmocracy”。光看名字,就能嗅到一股混合了技术极客与组织社会学的味道——“Swarm”(蜂群)加上“-cracy”&am…...

ElevenLabs Enterprise方案深度拆解:从API限流策略到GDPR语音数据主权管理的7层安全加固实践
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs Enterprise方案全景概览 ElevenLabs Enterprise 是面向中大型组织构建的语音合成与语音识别一体化平台,专为高并发、多租户、合规性敏感场景设计。其核心能力覆盖实时TTS流式输出…...

如何免费获取全球50+图书馆古籍资源:BookGet数字古籍下载完整指南
如何免费获取全球50图书馆古籍资源:BookGet数字古籍下载完整指南 【免费下载链接】bookget bookget 数字古籍图书下载工具。 项目地址: https://gitcode.com/gh_mirrors/bo/bookget 还在为寻找古籍文献而烦恼吗?想要从哈佛、国会图书馆等全球知名…...
图灵-人工智能之父)
图解人工智能(7)图灵-人工智能之父
图灵对人工智能这门学科做出了哪些贡献?这些贡献对于人工智能这门科学有什么重要意义?图灵提出图灵机模型,为人工智能准备了工具; 提出智能机器设想,奠定了人工智能的思想基础;提出图灵测试,为评估人工智能…...
)
别再只调包了!用PyTorch和DGL从零实现一个GCN层(附Cora节点分类实战代码)
从零构建图卷积网络:PyTorch与DGL实战中的底层逻辑拆解 当你第一次调用g.update_all()时,是否好奇过DGL框架背后究竟发生了什么?那些看似简单的消息传递和聚合操作,实际上隐藏着图卷积网络最精妙的设计思想。本文将带你深入GCN的数…...

5分钟免费解锁iPhone激活锁:applera1n终极使用指南
5分钟免费解锁iPhone激活锁:applera1n终极使用指南 【免费下载链接】applera1n icloud bypass for ios 15-16 项目地址: https://gitcode.com/gh_mirrors/ap/applera1n 你是否刚入手了一部二手iPhone,却发现自己被困在激活锁界面无法前进…...