解决LabVIEW通过OPC Server读取PLC地址时的错误180121602
在使用LabVIEW通过OPC Server读取PLC地址时,若遇到错误代码180121602,建议检查网络连接、OPC Server和PLC配置、用户权限及LabVIEW设置。确保网络畅通,正确配置OPC变量,取消缓冲设置以实时读取数据,并使用诊断工具验证连接,解决这一问题。
在LabVIEW中,您可以通过以下步骤在多变量编辑器中取消网络发布的“正在缓冲”选项,以确保获取到的是实时数据,而不是缓存的数据。
步骤:
-
打开LabVIEW:
- 启动LabVIEW开发环境。
-
打开项目:
- 打开包含您需要编辑的共享变量库的项目文件(.lvproj)。
-
导航到共享变量库:
- 在项目资源管理器中,找到包含您需要修改的共享变量的库(Library)。
-
打开多变量编辑器:
- 右键点击共享变量库(Library),选择“多变量编辑器”(Multiple Variable Editor)。
-
选择共享变量:
- 在多变量编辑器中,选择您需要修改的共享变量(可以按住
Ctrl键进行多选)。
- 在多变量编辑器中,选择您需要修改的共享变量(可以按住
-
修改网络发布设置:
- 在多变量编辑器中,找到网络发布的相关设置。具体位置可能因LabVIEW版本不同而略有不同,一般来说,您会看到类似“Network Publishing”或“Network Update”选项。
- 找到“正在缓冲”(或类似的“Buffering”)选项,取消勾选该选项。
-
应用更改:
- 确认所有需要修改的变量都取消了“正在缓冲”选项后,点击“应用”或“确定”保存更改。
-
部署共享变量库:
- 返回项目资源管理器,右键点击共享变量库,选择“部署”(Deploy),以应用和激活这些更改。
注意事项:
- LabVIEW版本差异:根据不同版本的LabVIEW,界面和选项可能会有所不同。如果上述步骤在您的版本中有些不同,请参考LabVIEW的帮助文档或用户手册,查找关于多变量编辑器和网络发布的详细说明。
- 确保权限:在进行这些更改时,确保您有足够的权限来修改共享变量库并进行部署。
通过上述步骤,您可以在LabVIEW中取消共享变量的网络发布缓冲设置,确保每次获取的数据都是实时的,而不是缓存的数据。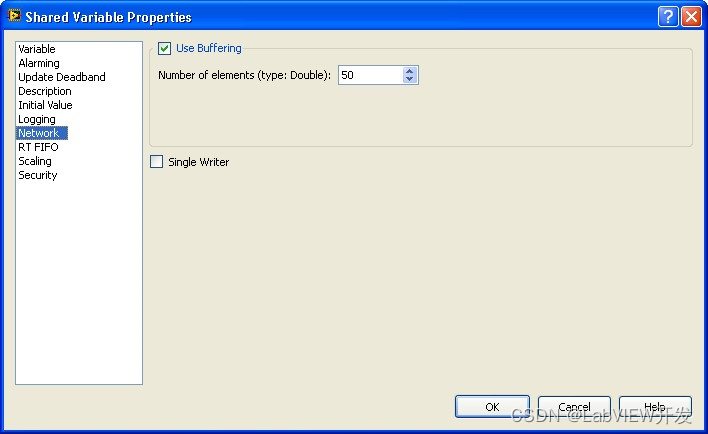
相关文章:
解决LabVIEW通过OPC Server读取PLC地址时的错误180121602
在使用LabVIEW通过OPC Server读取PLC地址时,若遇到错误代码180121602,建议检查网络连接、OPC Server和PLC配置、用户权限及LabVIEW设置。确保网络畅通,正确配置OPC变量,取消缓冲设置以实时读取数据,并使用诊断工具验证…...

npm,yarn,cnpm,tyarn,pnpm 安使用装配置镜像
npm 安装 安装node后就可以使用了 官方默认地址 npm config set registry https://registry.npmjs.org 镜像 npm config set registry https://registry.npm.taobao.org npm config set registry http://registry.npmmirror.org全局安装依赖 npm install -g <包名&g…...

使用python将一段文本写入一个txt文件中且先格式化文件名
有一段文本内容,有“标题”和“内容”组成。 任务:要将这段文本,存放到一个txt文件中,文件名为当天的日期加上“标题”内容。因为“标题”内可能有/<>之类的,还需要格式化一下。 已经将上述功能都写成了函数&a…...

前端 CSS 经典:元素倒影
前言:好看的元素倒影,可以通过-webkit-box-reflect 实现。但有兼容问题,必须是 webkit 内核的浏览器,不然没效果。但是好看啊。 效果图: 代码实现: <!DOCTYPE html> <html lang"en"&g…...

ROS学习记录:用C++实现IMU航向锁定
前言 获取IMU数据的C节点 在了解了如何获取到IMU的姿态信息(链接在上面)后,接下来尝试实现让一个节点在订阅IMU数据的时候,还能发布运动控制指令,使机器人能对姿态变化做出反应,达到一个航向锁定的效果。 …...

设计模式-策略模式-使用
设计模式-策略模式-CSDN博客 系统中有很多类,它们之间的区别仅在于它们的行为。策略模式可以定义一系列的算法,并将它们一个个封装起来,使它们可以相互替换。这样,算法就可以独立于使用它的客户而变化。需要使用算法的不同变体。…...

WebSocket——相关介绍以及后端配置
一、WebSocket介绍: WebSocket是一种在单个TCP连接上进行全双工通信的协议,旨在改进客户端和服务器之间的实时通信。以下是关于WebSocket的详细介绍: 1、定义与标准 WebSocket是独立的、创建在TCP上的协议,通过HTTP/1.1协议的10…...
单片机设计注意事项
1.电源线可以30mil走线,信号线可以6mil走线 2.LDO推荐 SGM2019-3.3,RT9013,RT9193,1117-3.3V。 3.单片机VCC要充分滤波后再供电,可以接0.1uf的电容 4.晶振附件不要走其他元件,且放置完单片机后就放置晶振,晶振靠近X1,X2。...

Ubuntu 如何根据NVIDIA显卡型号确定对应的显卡驱动版本并安装
目录 一、查询推荐安装的驱动版本 二、安装推荐版本的驱动 1. 通过终端安装,只安装 nvidia 驱动(亲测可用!) 2. 通过 software & Updates 安装,安装 nvidia 驱动。 三、查询能安装的最新的显卡驱动版本 1. 方…...
如何选择一款安全高效的数据自动同步工具?
随着科技的不断发展,企业处理的数据量愈发庞大。数字化浪潮的涌现使得数据在业务活动和决策中的角色变得日益重要,然而这些数据往往分布在不同的位置,需要进行同步和分类,以便更有效地利用。以下是一些常见的数据自动同步场景&…...
【linux】docker下nextcloud安装人脸识别插件
一、插件源码地址: GitCode - 开发者的代码家园 二、插件官网地址: Releases - Face Recognition - Apps - App Store - Nextcloud 三、插件安装教程: 1、查看本地nextcloud版本号 http://ipAddress:8080/settings/admin/overview 2、找…...
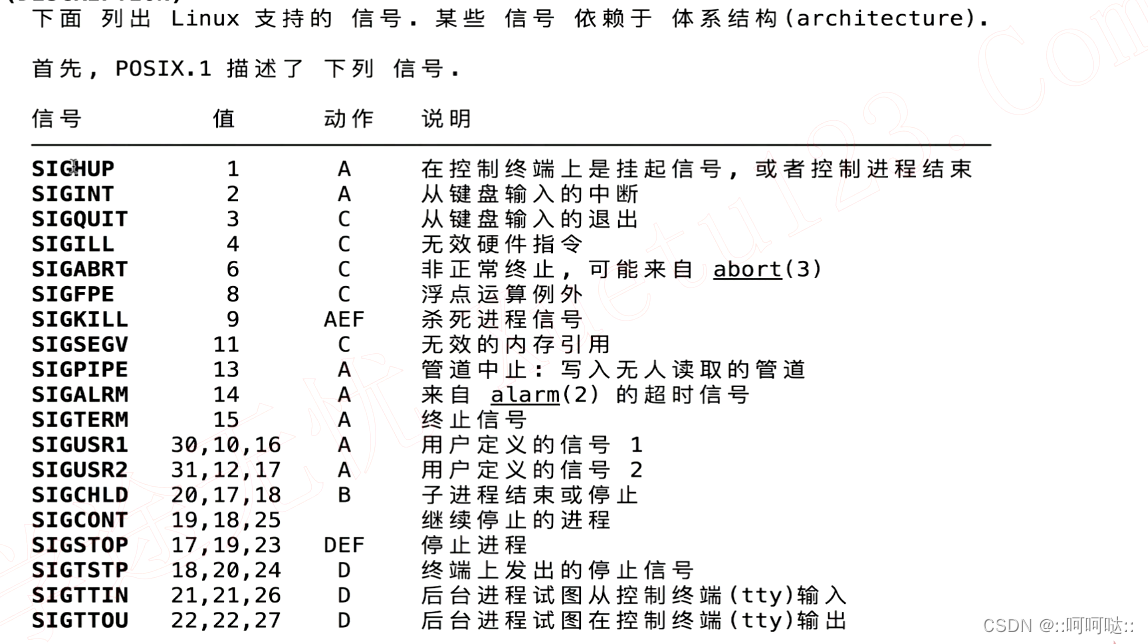
2. C++服务器编程-信号
什么是信号 其实信号就是一个中断。就是在执行程序的时候突然来了一个信号,然后我们去执行这个新来的程序了,这就是中断。 处理方法 信号的处理方式∶忽略、捕获、默认处理 linux中都有那些信号 man7 signal 比如说kill -9 安装man中文手册 自己百…...
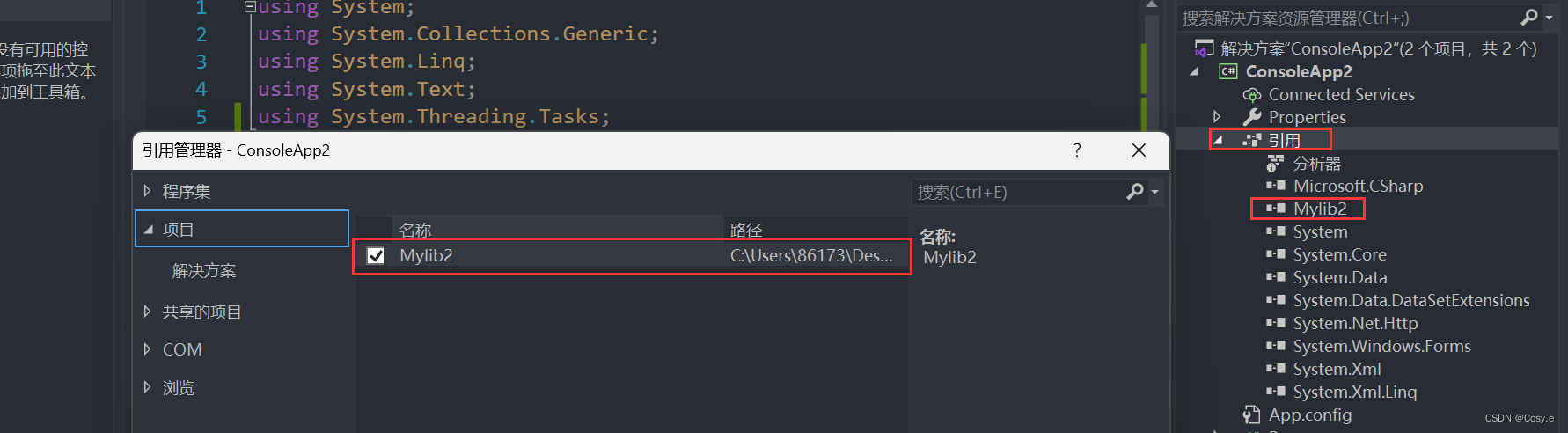
C#_库的引用
类库的引用 还可以自己引用类库:解决方案-添加-新建项目 主程序 using System; using System.Windows.Forms; using Tools;namespace ConsoleApp2 {class Program{static void Main(string[] args){//Console.WriteLine("helloword");// Form form ne…...

C++:STL—算法
C:STL—算法 算法 算法 STL(Standard Template Library)中的算法是为了操作数据集合(如容器)而设计的函数模板集合,它们提供了丰富的功能和灵活的接口,可以用于对数据进行排序、查找、遍历等操作。STL中的…...

深入探索:移动云服务器的强大之处
文章目录 一 什么是移动云二 移动云服务器的使用三 移动云服务器的优点四 在移动云上部署node.js项目五 移动云服务器的应用场景六 移动云服务器的使用体验总结 一 什么是移动云 移动云是指用户可以通过移动设备访问云端的数据和应用,无需在本地设备上进行存储和处…...
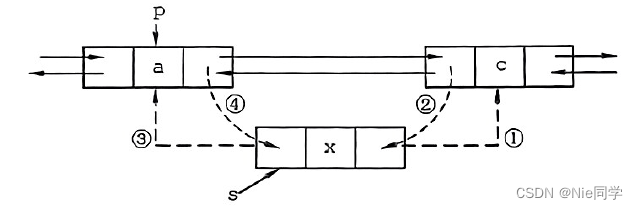
线性表(从数据结构的三要素出发)
文章目录 逻辑结构存储结构顺序存储链式存储单链表双链表循环单链表循环双链表静态链表 数据的操作顺序结构链式结构单链表双链表 逻辑结构 线性表是具有相同数据类型的 n ( n ≥ 0 ) n(n≥0) n(n≥0)个数据元素的有限序列,其中 n n n为表长,当 n 0 n0…...

[SCTF2019]babyre
打开看看还是有花指令 解除后首先pass1是解maze,好像又是三维的 x是25,也就是向下跳五层,注意是立体的 得到 passwd1: ddwwxxssxaxwwaasasyywwdd 接着往下看 有一个加密函数IDA逆向常用宏定义_lodword-CSDN博客 unsigned __int64 __fastca…...

uniapp实现下拉过滤查询列表
<picker bindchange"bindPickerChanges" value"{{selectedIndex}}"range"{{pickerArray}}"range-key"name"><view class"area-select">在线状态:<label for"">{{pickerArray[select…...

C++—— set、map、multiset、multimap的介绍及使用
目录 关联式容器 关联式容器的特点和使用场景 树形结构与哈希结构 树形结构 哈希结构 键值对 set set的介绍 set的定义方式 set的使用 multiset map map的介绍 map的定义方式 map的使用 multimap 关联式容器 C标准模板库(STL)中的关联…...
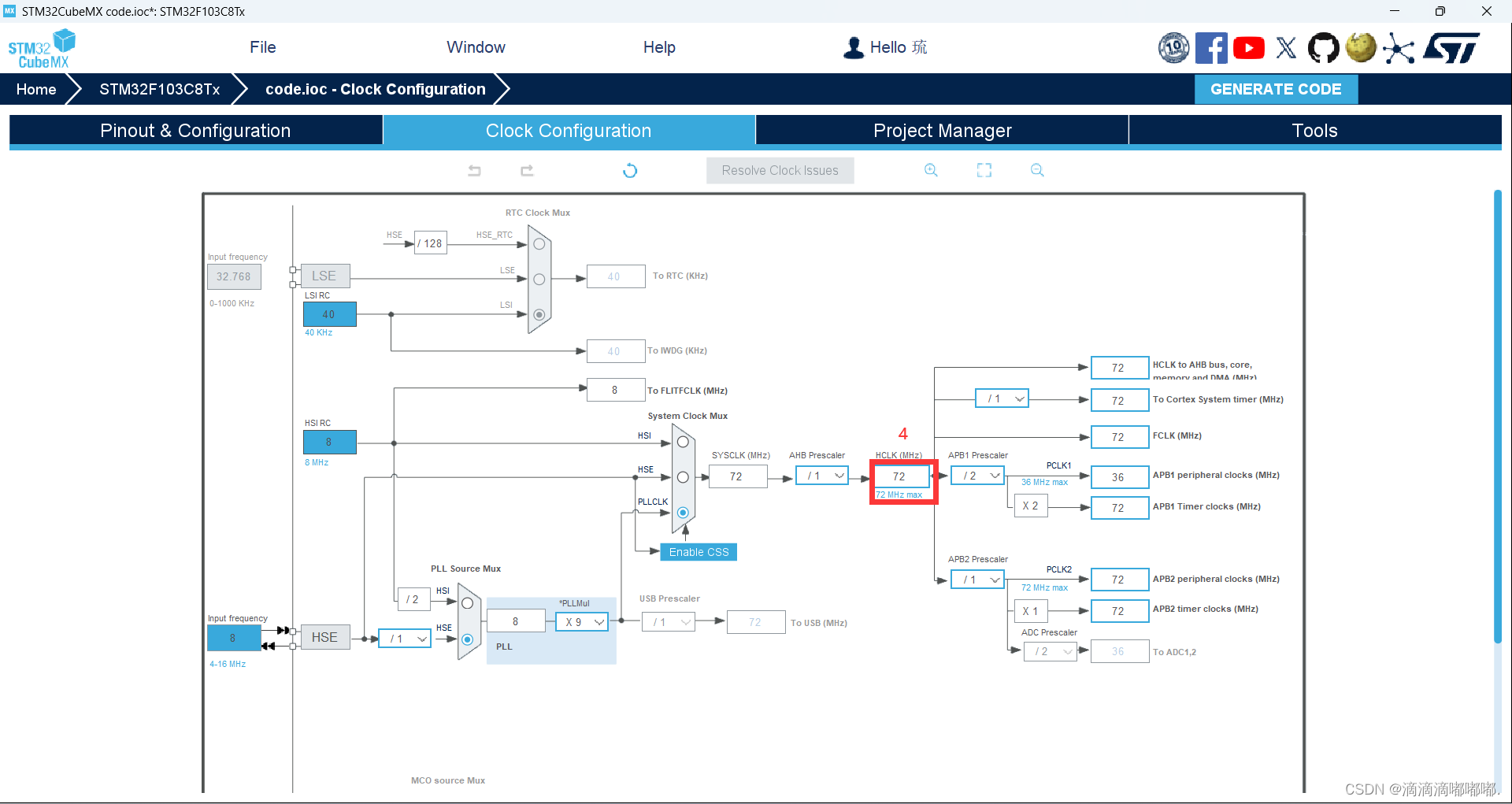
STM32 学习——1. STM32最小系统
这是一个最小系统的测试,LED灯会进行闪烁。选用PC13口,因为STM32F103C8T6 硬件开发板中,这个端口是一个LED 1. proteus8.15 原理图 2. cubemx 新建工程 3. keil 代码 while (1){HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);HAL_Delay(100);…...

Blender渲染通道完全指南:如何像电影后期一样,分离出深度、阴影与反射图
Blender渲染通道完全指南:影视级后期制作的深度解析在数字内容创作领域,Blender已经从一个简单的3D建模工具成长为能够处理复杂视觉特效的全流程解决方案。对于追求影视级质量的中高级用户而言,掌握渲染通道技术是提升作品专业度的关键一步。…...
 第五篇:声明时的键值设计技巧:结构与内表的主键、非主键配置指南)
SAP-ABAP:变量、常量、结构与内表声明(10篇博客合集) 第五篇:声明时的键值设计技巧:结构与内表的主键、非主键配置指南
变量、常量、结构与内表声明(10篇博客合集) 第五篇:声明时的键值设计技巧:结构与内表的主键、非主键配置指南如果把内表比作一张内存中的“数据库表”,那么键就是这张表的索引甚至主键。键的设计直接决定了数据的唯一性…...

3分钟掌握HashCalculator:你的文件完整性守护专家
3分钟掌握HashCalculator:你的文件完整性守护专家 【免费下载链接】HashCalculator 哈希值计算工具,批量计算/批量校验/查找重复文件/改变哈希值等,支持集成到系统右键菜单 项目地址: https://gitcode.com/gh_mirrors/ha/HashCalculator …...

关联规则挖掘在Calabi-Yau流形Hodge数分析中的应用与复现
1. 项目概述:当数据挖掘遇见高维几何在理论物理和代数几何的交叉领域,Calabi-Yau流形一直扮演着核心角色。这些具有特殊拓扑结构的空间,不仅是弦理论中额外维度紧化的关键候选者,其本身丰富的数学性质也吸引着无数研究者。然而&am…...

企业内统一API网关与Taotoken聚合平台对接方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内统一API网关与Taotoken聚合平台对接方案 在推进AI应用落地的过程中,许多中大型企业面临一个共同挑战:…...

开源ELM327 OBD-II适配器:从硬件设计到多协议固件实现全解析
1. 项目概述:开源ELM327 OBD适配器如果你对汽车诊断、数据监控或者嵌入式开发感兴趣,那么自己动手做一个OBD-II适配器绝对是个能让你学到很多东西的硬核项目。今天要聊的,就是一个完全开源的、基于NXP LPC1517微控制器的ELM327兼容OBD适配器。…...

Unity项目DrawCall降不下来?试试用Mesh Baker合并贴图集,保姆级图文教程
Unity性能优化实战:用Mesh Baker合并贴图集降低DrawCall全流程解析当你的Unity项目帧率开始卡顿,Profiler里DrawCall数字居高不下时,合并贴图集往往是解决问题的关键一步。本文将以一个实际项目为例,带你从零开始使用Mesh Baker的…...

Windows Cleaner:终极免费系统清理工具,彻底解决C盘空间不足问题
Windows Cleaner:终极免费系统清理工具,彻底解决C盘空间不足问题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否经常遇到C盘爆红、…...

如何快速定制Office界面:终极开源工具使用指南
如何快速定制Office界面:终极开源工具使用指南 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbonx-editor O…...

CMSIS-DAP调试器原理与应用:以Elektor mbed interface为例
1. 项目概述:Elektor mbed interface [150554] 是什么?如果你玩过ARM Cortex-M系列的单片机,尤其是NXP LPC800系列,那你可能对“CMSIS-DAP”这个调试器标准不陌生。它是由ARM官方推出的一个开源调试接口标准,最大的好处…...