ROS学习记录:用C++实现IMU航向锁定
前言
获取IMU数据的C++节点
在了解了如何获取到IMU的姿态信息(链接在上面)后,接下来尝试实现让一个节点在订阅IMU数据的时候,还能发布运动控制指令,使机器人能对姿态变化做出反应,达到一个航向锁定的效果。
一、实现步骤

二、开始操作
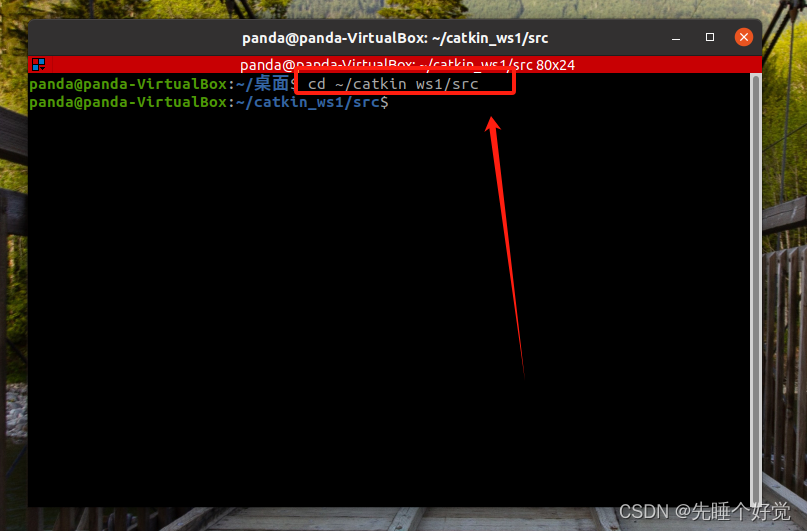
1、打开一个终端,输入cd ~/catkin_ws1/src,进入工作空间
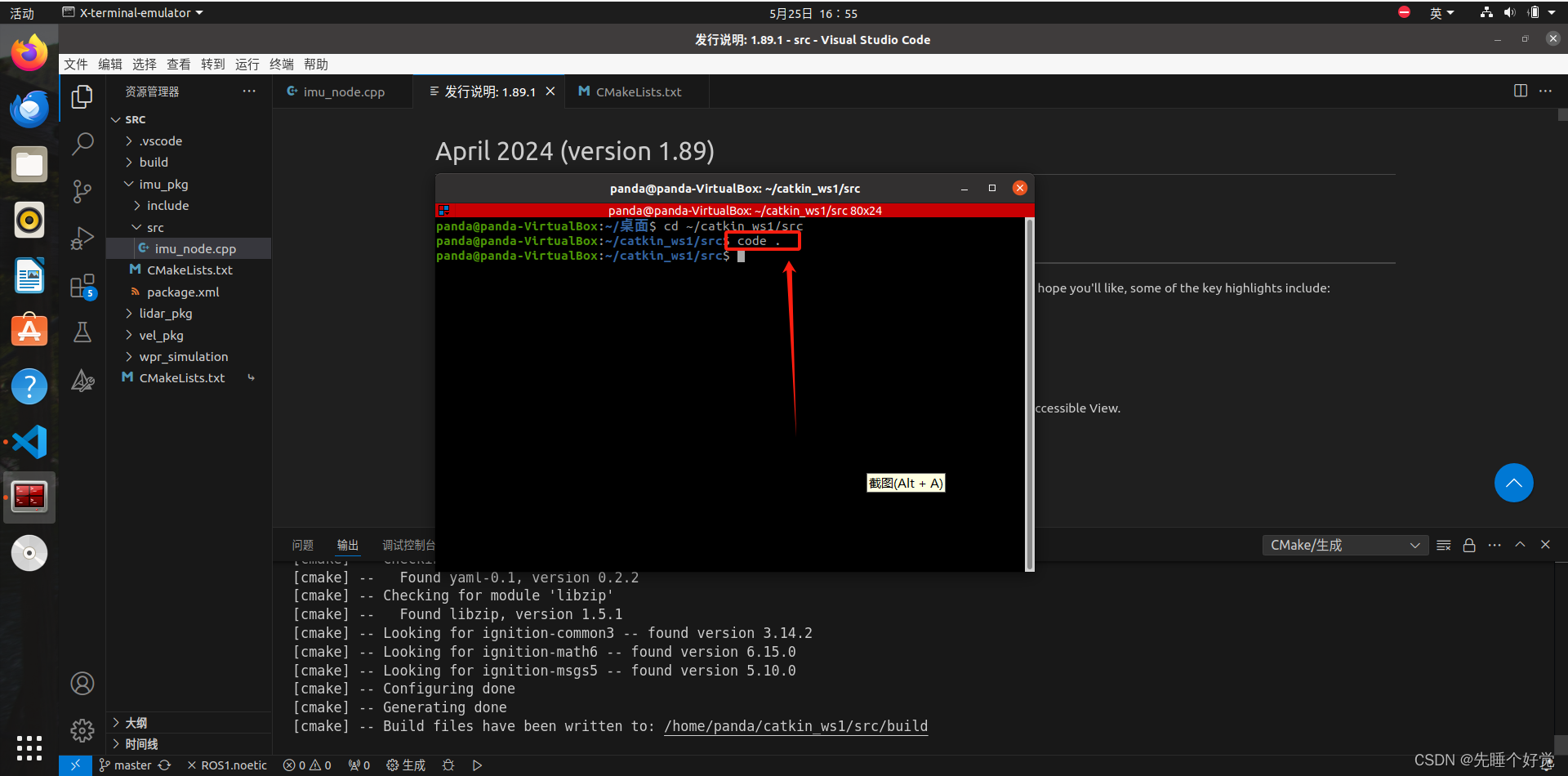
2、输入 code . 打开VScode
3、在VScode中打开上一篇文章编写的imu_node.cpp, 上一篇文章链接已经放在开头
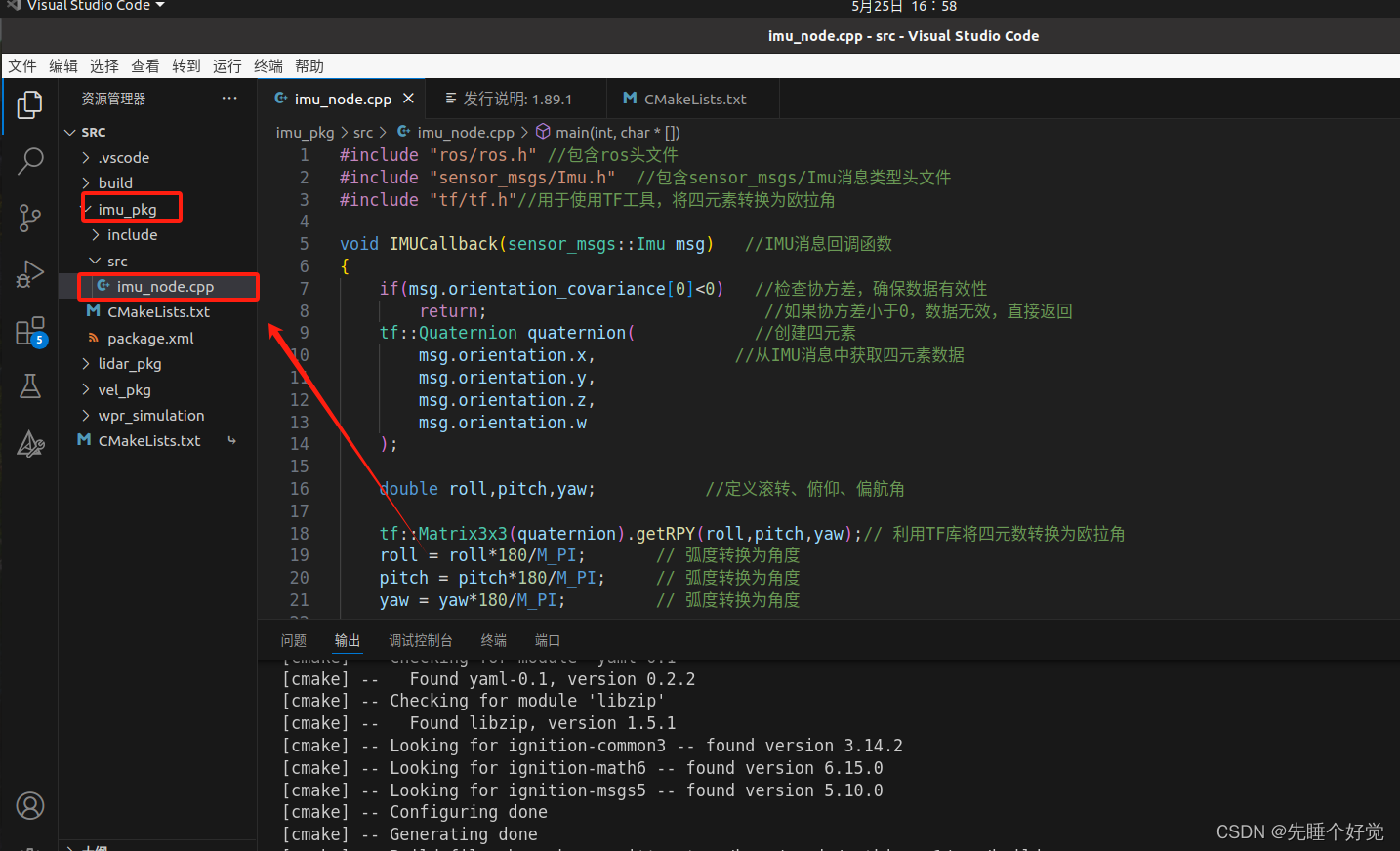
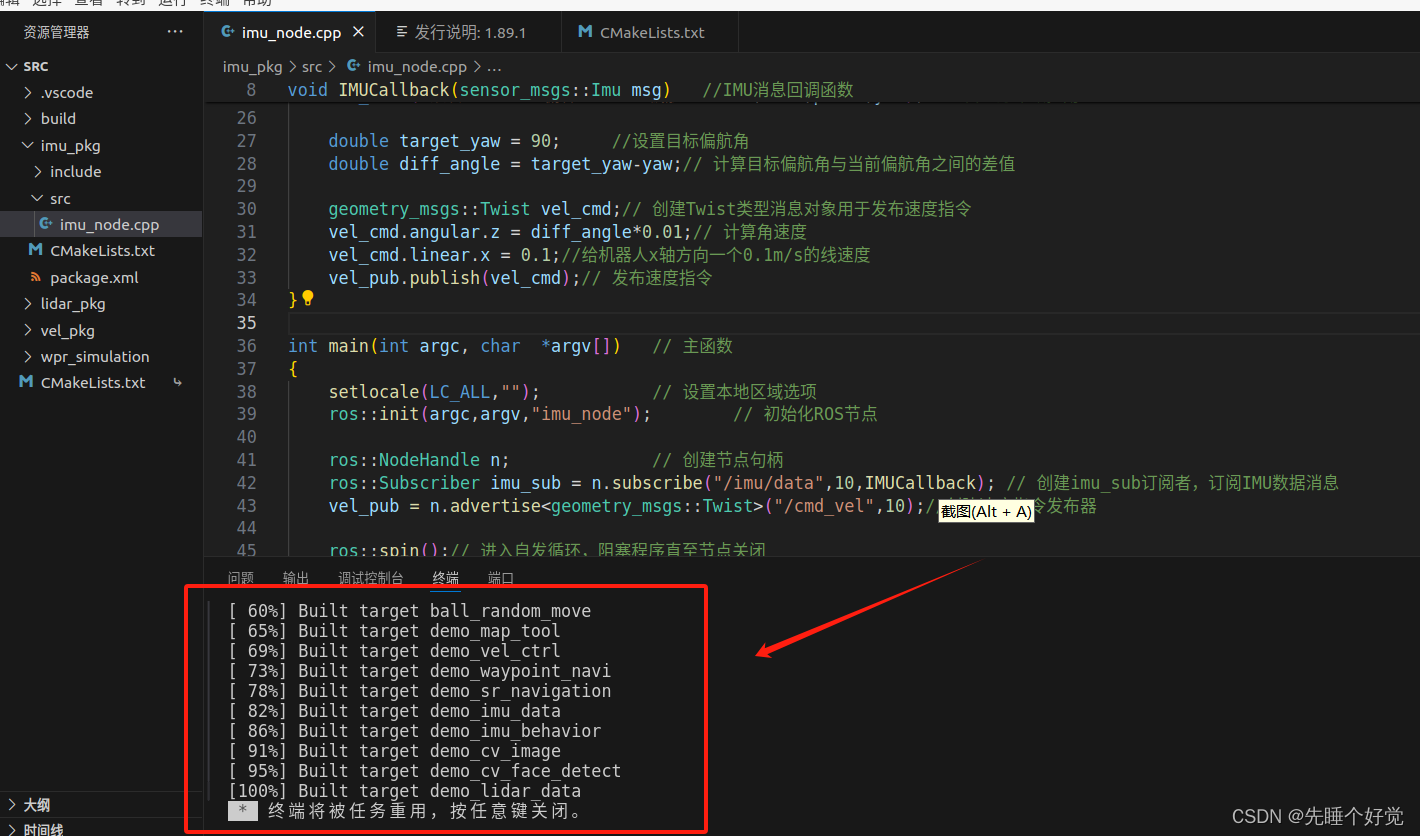
4、在imu_node.cpp中写入如下代码
#include "ros/ros.h" //包含ros头文件
#include "sensor_msgs/Imu.h" //包含sensor_msgs/Imu消息类型头文件
#include "tf/tf.h"//用于使用TF工具,将四元素转换为欧拉角
#include "geometry_msgs/Twist.h"//引入速度消息包的头文件ros::Publisher vel_pub;//定义一个发布对象vel_pubvoid IMUCallback(sensor_msgs::Imu msg) //IMU消息回调函数
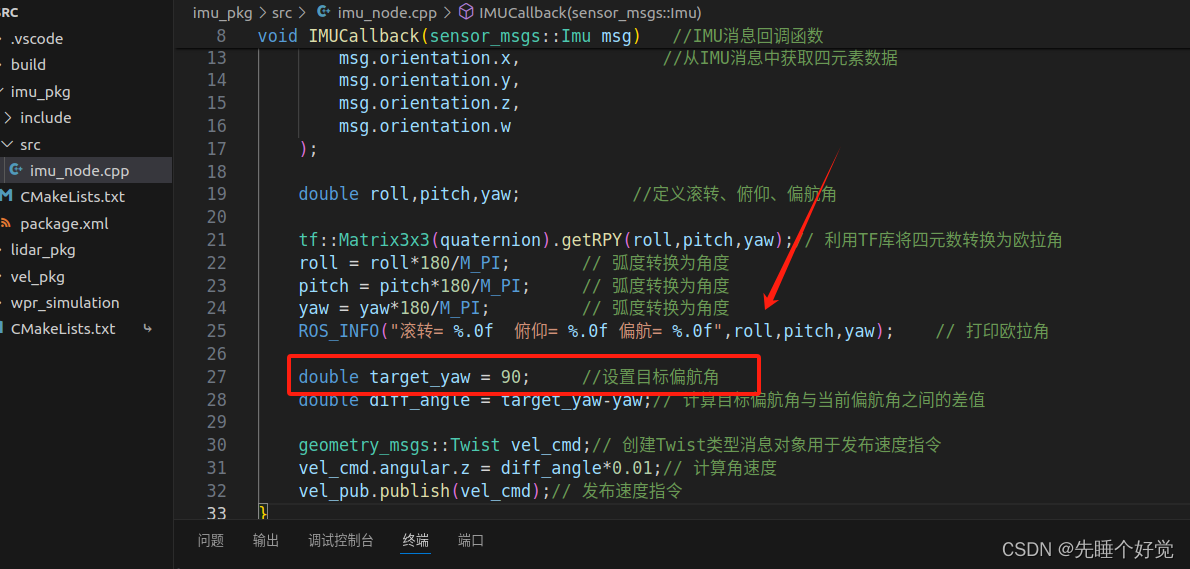
{if(msg.orientation_covariance[0]<0) //检查协方差,确保数据有效性return; //如果协方差小于0,数据无效,直接返回tf::Quaternion quaternion( //创建四元素msg.orientation.x, //从IMU消息中获取四元素数据msg.orientation.y,msg.orientation.z,msg.orientation.w);double roll,pitch,yaw; //定义滚转、俯仰、偏航角tf::Matrix3x3(quaternion).getRPY(roll,pitch,yaw);// 利用TF库将四元数转换为欧拉角roll = roll*180/M_PI; // 弧度转换为角度pitch = pitch*180/M_PI; // 弧度转换为角度yaw = yaw*180/M_PI; // 弧度转换为角度ROS_INFO("滚转= %.0f 俯仰= %.0f 偏航= %.0f",roll,pitch,yaw); // 打印欧拉角double target_yaw = 90; //设置目标偏航角double diff_angle = target_yaw-yaw;// 计算目标偏航角与当前偏航角之间的差值geometry_msgs::Twist vel_cmd;// 创建Twist类型消息对象用于发布速度指令vel_cmd.angular.z = diff_angle*0.01;// 计算角速度vel_pub.publish(vel_cmd);// 发布速度指令
}int main(int argc, char *argv[]) // 主函数
{setlocale(LC_ALL,""); // 设置本地区域选项ros::init(argc,argv,"imu_node"); // 初始化ROS节点ros::NodeHandle n; // 创建节点句柄ros::Subscriber imu_sub = n.subscribe("/imu/data",10,IMUCallback); // 创建imu_sub订阅者,订阅IMU数据消息vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);//创建速度指令发布器ros::spin();// 进入自发循环,阻塞程序直至节点关闭return 0;
}
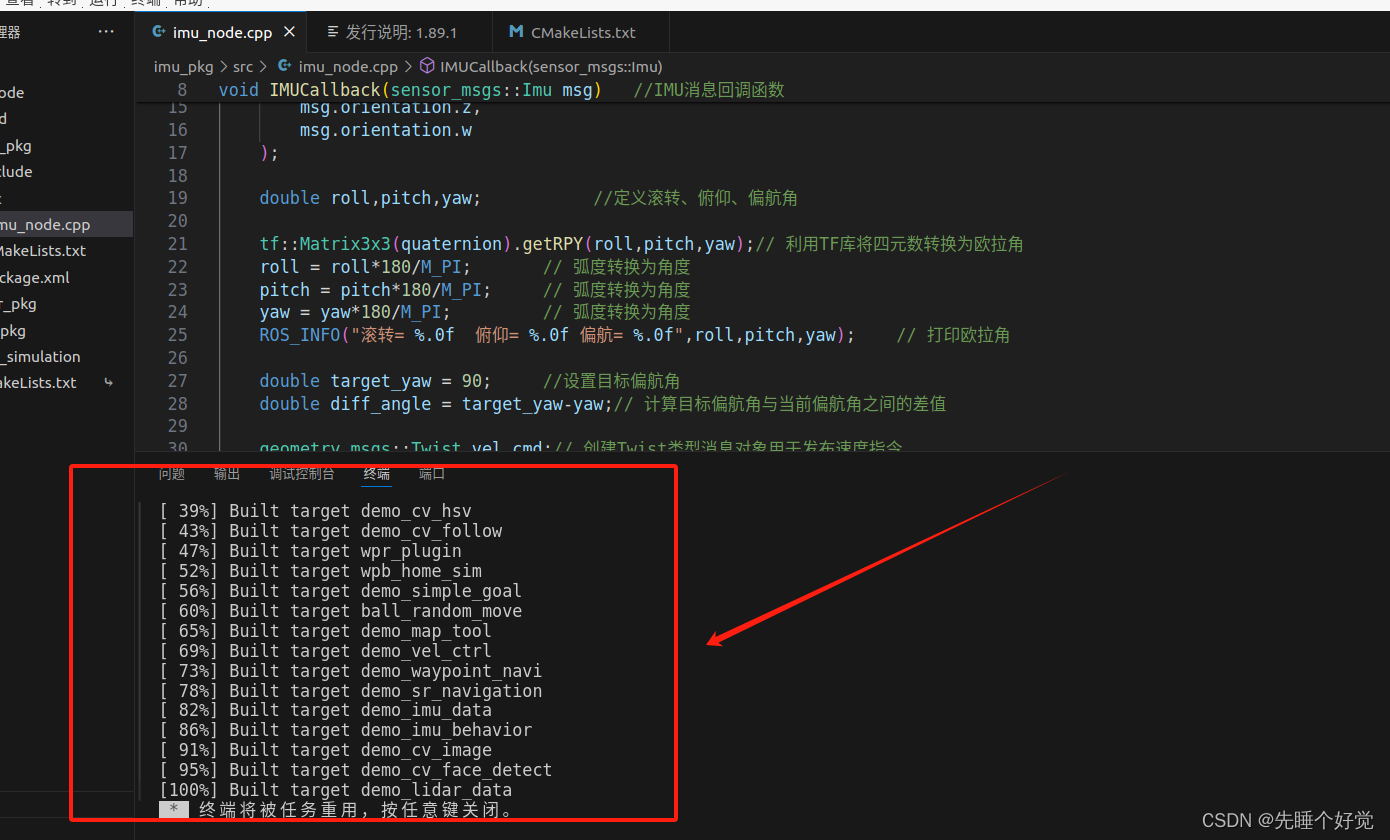
5、按CTRL+S进行保存,再按CTRL+SHIFT进行编译,编译成功
6、在终端中输入cd ~/catkin_ws1,进入工作空间
7、再输入source ./devel/setup.bash,设置ROS的环境变量,以便在当前的终端窗口中正确运行ROS软件包。
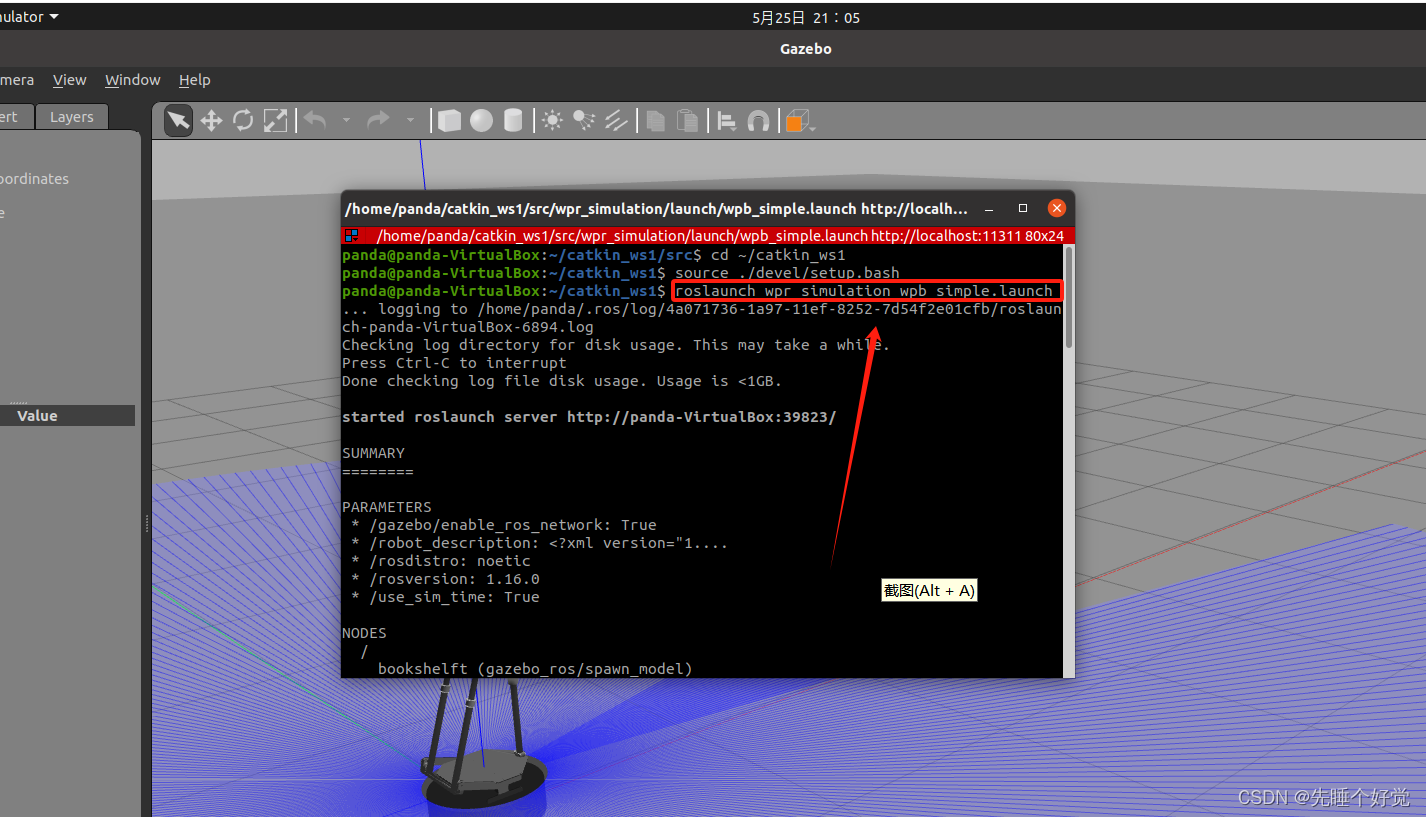
8、再输入roslaunch wpr_simulation wpb_simple.launch,启动机器人仿真环境
9、再打开一个终端,进入工作空间后输入source ./devel/setup.bash,设置环境变量

10、输入rosrun imu_pkg imu_node运行刚刚我们更新的节点
11、可以看到机器人偏航角锁定在了90度
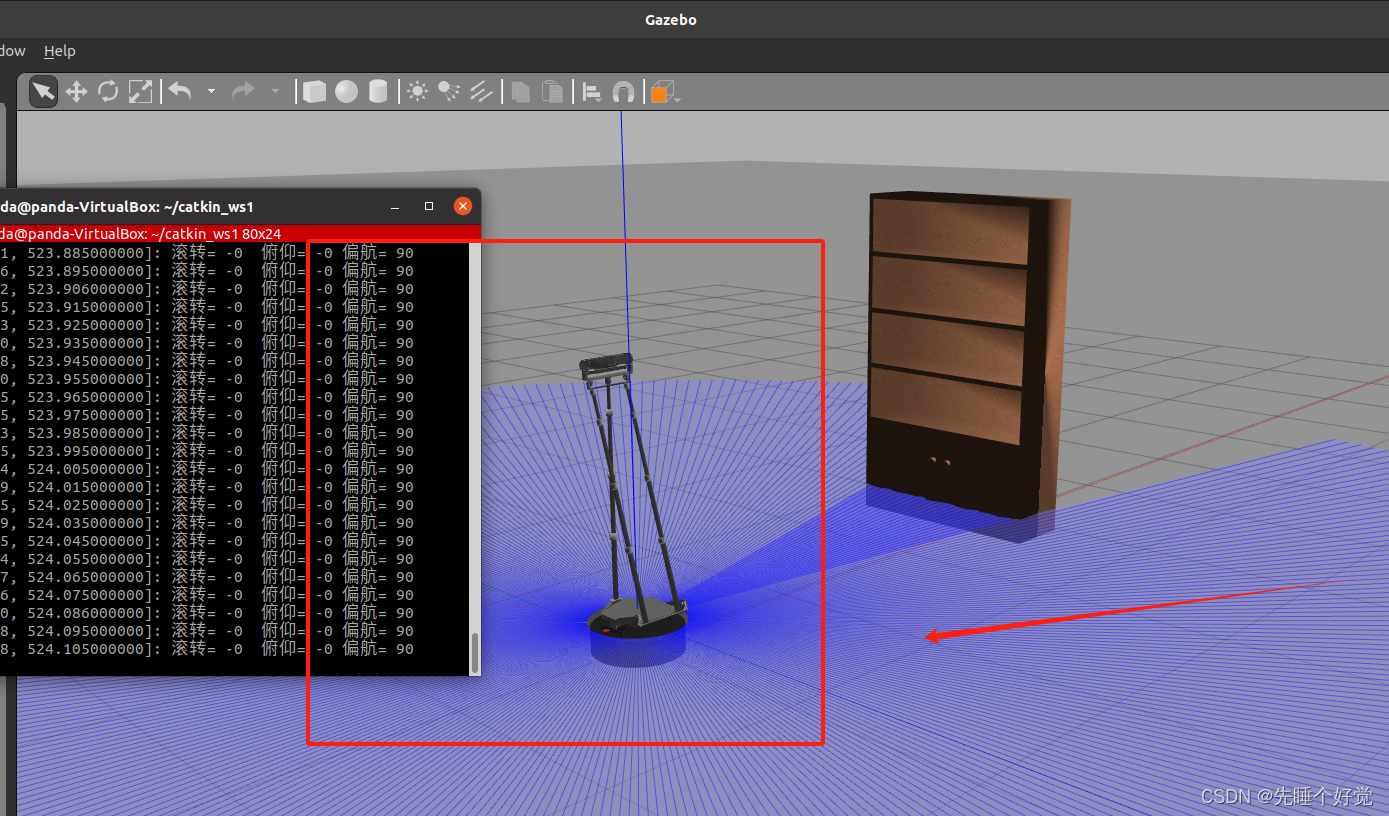
12、这时因为在代码中,我们设定了目标偏航角为90度,如果想要机器人朝向其它角度可以自行修改
13、点这个旋转按钮,对机器人进行旋转,拖动这个蓝色的圈圈,机器人转动后,一松开鼠标,可以发现机器人会自行转回去直至目标角度90度,这便是偏航角锁定。
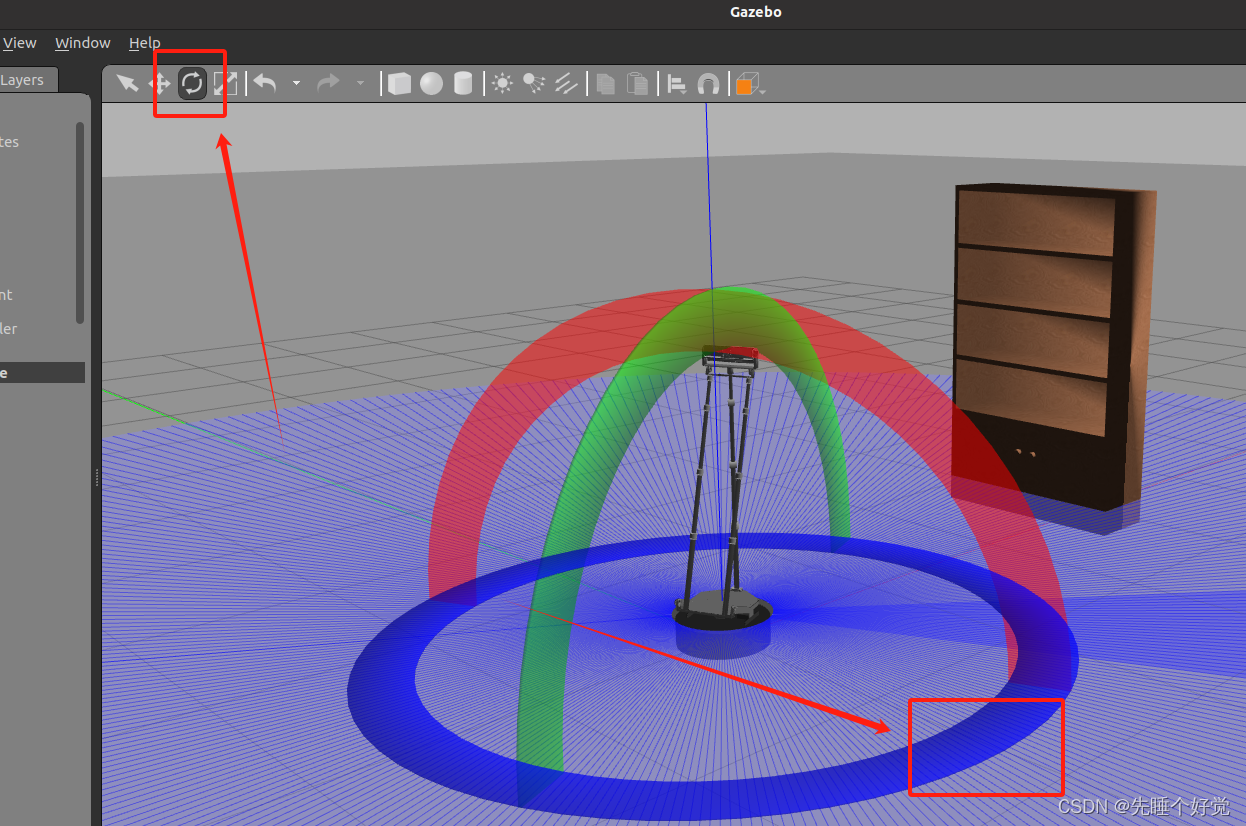
ROS机器人偏航角锁定演示
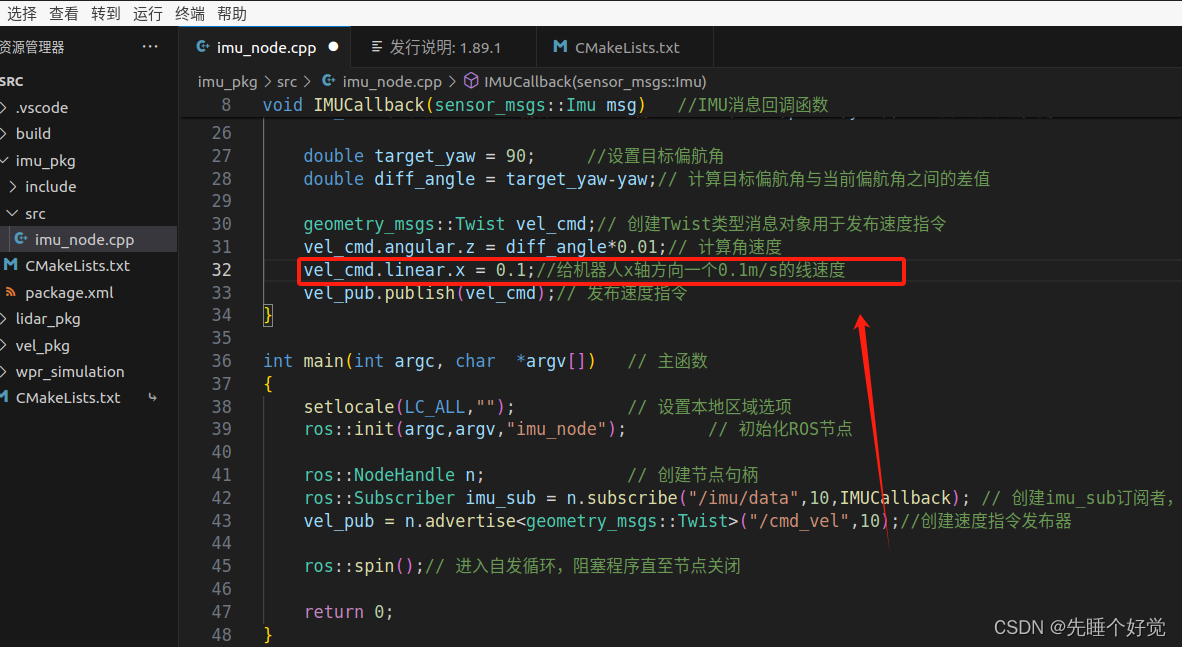
14、回到节点代码,在这里加上这一句代码,给机器一个前进的速度,可以预想到,机器人会一边前进一边转弯。
#include "ros/ros.h" //包含ros头文件
#include "sensor_msgs/Imu.h" //包含sensor_msgs/Imu消息类型头文件
#include "tf/tf.h"//用于使用TF工具,将四元素转换为欧拉角
#include "geometry_msgs/Twist.h"//引入速度消息包的头文件ros::Publisher vel_pub;//定义一个发布对象vel_pubvoid IMUCallback(sensor_msgs::Imu msg) //IMU消息回调函数
{if(msg.orientation_covariance[0]<0) //检查协方差,确保数据有效性return; //如果协方差小于0,数据无效,直接返回tf::Quaternion quaternion( //创建四元素msg.orientation.x, //从IMU消息中获取四元素数据msg.orientation.y,msg.orientation.z,msg.orientation.w);double roll,pitch,yaw; //定义滚转、俯仰、偏航角tf::Matrix3x3(quaternion).getRPY(roll,pitch,yaw);// 利用TF库将四元数转换为欧拉角roll = roll*180/M_PI; // 弧度转换为角度pitch = pitch*180/M_PI; // 弧度转换为角度yaw = yaw*180/M_PI; // 弧度转换为角度ROS_INFO("滚转= %.0f 俯仰= %.0f 偏航= %.0f",roll,pitch,yaw); // 打印欧拉角double target_yaw = 90; //设置目标偏航角double diff_angle = target_yaw-yaw;// 计算目标偏航角与当前偏航角之间的差值geometry_msgs::Twist vel_cmd;// 创建Twist类型消息对象用于发布速度指令vel_cmd.angular.z = diff_angle*0.01;// 计算角速度vel_cmd.linear.x = 0.1;//给机器人x轴方向一个0.1m/s的线速度vel_pub.publish(vel_cmd);// 发布速度指令
}int main(int argc, char *argv[]) // 主函数
{setlocale(LC_ALL,""); // 设置本地区域选项ros::init(argc,argv,"imu_node"); // 初始化ROS节点ros::NodeHandle n; // 创建节点句柄ros::Subscriber imu_sub = n.subscribe("/imu/data",10,IMUCallback); // 创建imu_sub订阅者,订阅IMU数据消息vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);//创建速度指令发布器ros::spin();// 进入自发循环,阻塞程序直至节点关闭return 0;
}
15、CTRL+S保存后,在按CTRL+SHIFT编译,编译成功
16、先按CTRL+Z停止运行刚刚的节点,在重新运行节点

17、可以看到当拉动蓝色的圈圈后,机器人一边转一边前进。

相关文章:
ROS学习记录:用C++实现IMU航向锁定
前言 获取IMU数据的C节点 在了解了如何获取到IMU的姿态信息(链接在上面)后,接下来尝试实现让一个节点在订阅IMU数据的时候,还能发布运动控制指令,使机器人能对姿态变化做出反应,达到一个航向锁定的效果。 …...

设计模式-策略模式-使用
设计模式-策略模式-CSDN博客 系统中有很多类,它们之间的区别仅在于它们的行为。策略模式可以定义一系列的算法,并将它们一个个封装起来,使它们可以相互替换。这样,算法就可以独立于使用它的客户而变化。需要使用算法的不同变体。…...

WebSocket——相关介绍以及后端配置
一、WebSocket介绍: WebSocket是一种在单个TCP连接上进行全双工通信的协议,旨在改进客户端和服务器之间的实时通信。以下是关于WebSocket的详细介绍: 1、定义与标准 WebSocket是独立的、创建在TCP上的协议,通过HTTP/1.1协议的10…...
单片机设计注意事项
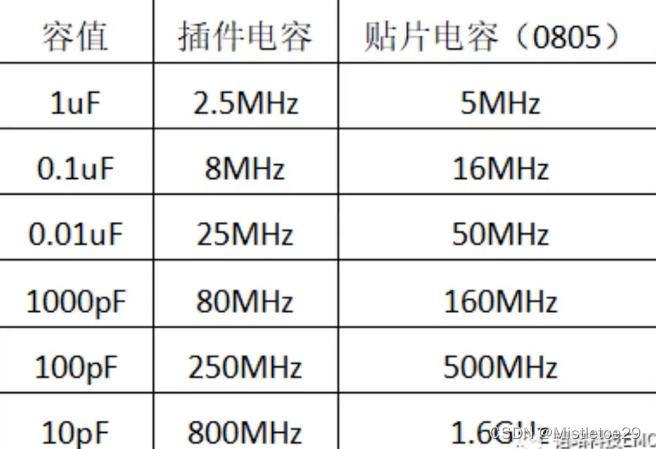
1.电源线可以30mil走线,信号线可以6mil走线 2.LDO推荐 SGM2019-3.3,RT9013,RT9193,1117-3.3V。 3.单片机VCC要充分滤波后再供电,可以接0.1uf的电容 4.晶振附件不要走其他元件,且放置完单片机后就放置晶振,晶振靠近X1,X2。...

Ubuntu 如何根据NVIDIA显卡型号确定对应的显卡驱动版本并安装
目录 一、查询推荐安装的驱动版本 二、安装推荐版本的驱动 1. 通过终端安装,只安装 nvidia 驱动(亲测可用!) 2. 通过 software & Updates 安装,安装 nvidia 驱动。 三、查询能安装的最新的显卡驱动版本 1. 方…...
如何选择一款安全高效的数据自动同步工具?
随着科技的不断发展,企业处理的数据量愈发庞大。数字化浪潮的涌现使得数据在业务活动和决策中的角色变得日益重要,然而这些数据往往分布在不同的位置,需要进行同步和分类,以便更有效地利用。以下是一些常见的数据自动同步场景&…...
【linux】docker下nextcloud安装人脸识别插件
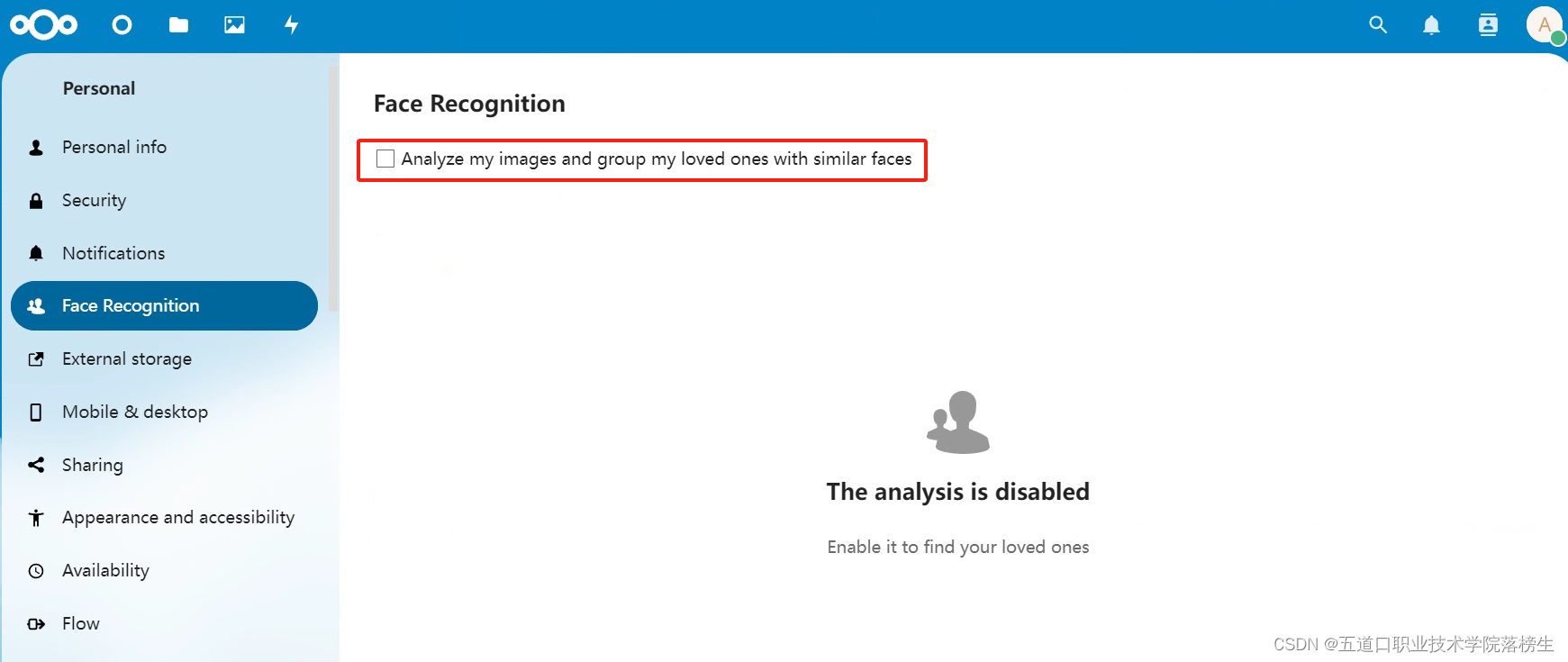
一、插件源码地址: GitCode - 开发者的代码家园 二、插件官网地址: Releases - Face Recognition - Apps - App Store - Nextcloud 三、插件安装教程: 1、查看本地nextcloud版本号 http://ipAddress:8080/settings/admin/overview 2、找…...
2. C++服务器编程-信号
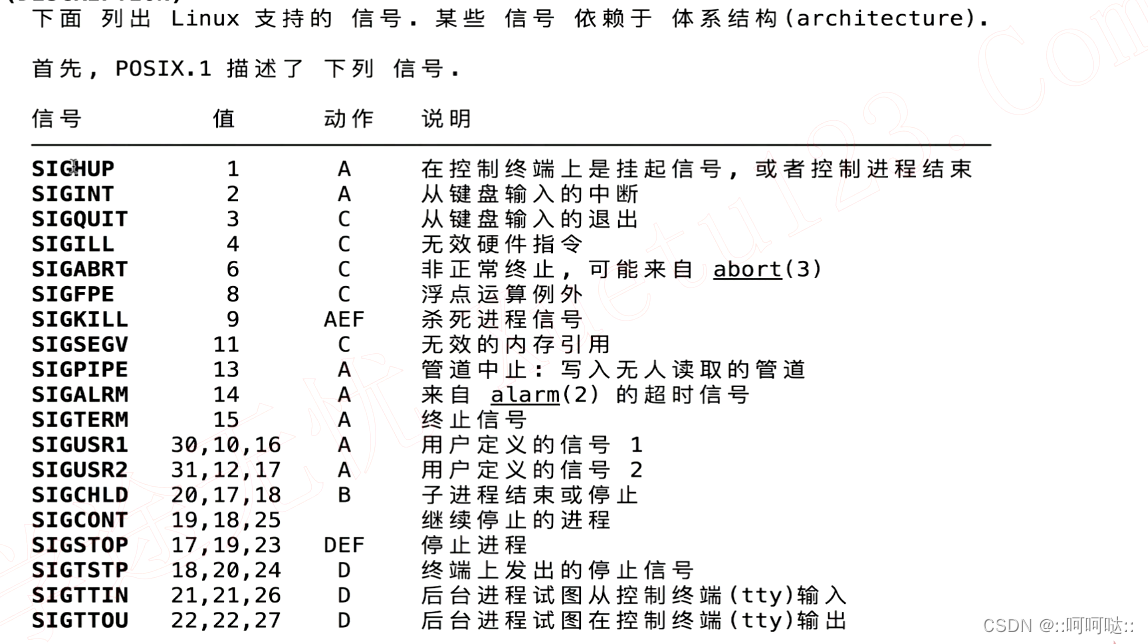
什么是信号 其实信号就是一个中断。就是在执行程序的时候突然来了一个信号,然后我们去执行这个新来的程序了,这就是中断。 处理方法 信号的处理方式∶忽略、捕获、默认处理 linux中都有那些信号 man7 signal 比如说kill -9 安装man中文手册 自己百…...
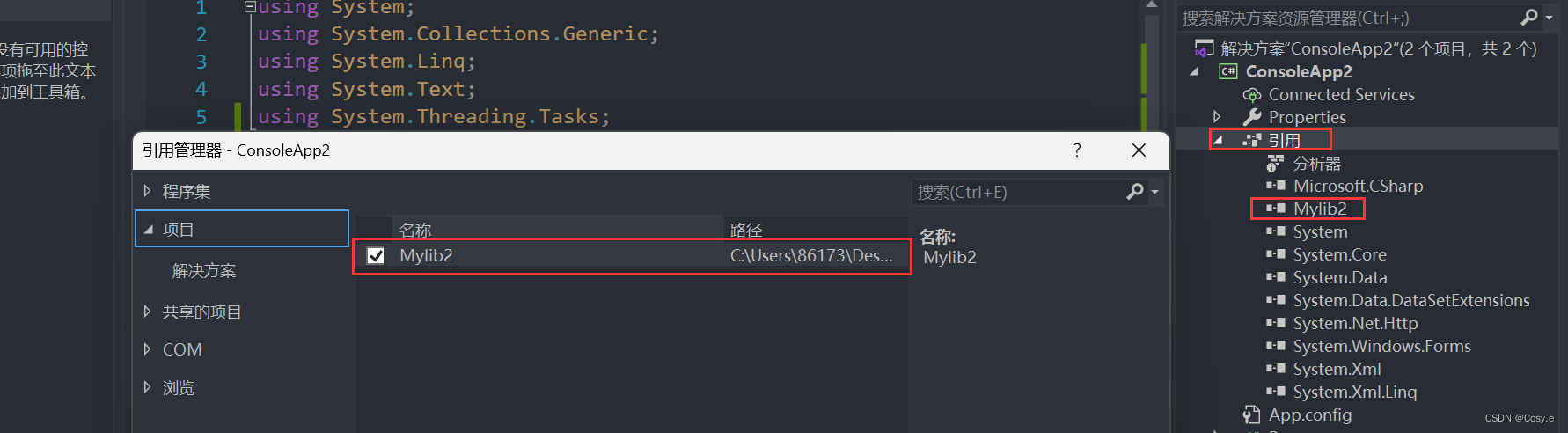
C#_库的引用
类库的引用 还可以自己引用类库:解决方案-添加-新建项目 主程序 using System; using System.Windows.Forms; using Tools;namespace ConsoleApp2 {class Program{static void Main(string[] args){//Console.WriteLine("helloword");// Form form ne…...

C++:STL—算法
C:STL—算法 算法 算法 STL(Standard Template Library)中的算法是为了操作数据集合(如容器)而设计的函数模板集合,它们提供了丰富的功能和灵活的接口,可以用于对数据进行排序、查找、遍历等操作。STL中的…...

深入探索:移动云服务器的强大之处
文章目录 一 什么是移动云二 移动云服务器的使用三 移动云服务器的优点四 在移动云上部署node.js项目五 移动云服务器的应用场景六 移动云服务器的使用体验总结 一 什么是移动云 移动云是指用户可以通过移动设备访问云端的数据和应用,无需在本地设备上进行存储和处…...
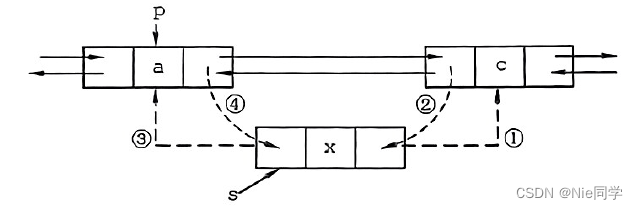
线性表(从数据结构的三要素出发)
文章目录 逻辑结构存储结构顺序存储链式存储单链表双链表循环单链表循环双链表静态链表 数据的操作顺序结构链式结构单链表双链表 逻辑结构 线性表是具有相同数据类型的 n ( n ≥ 0 ) n(n≥0) n(n≥0)个数据元素的有限序列,其中 n n n为表长,当 n 0 n0…...

[SCTF2019]babyre
打开看看还是有花指令 解除后首先pass1是解maze,好像又是三维的 x是25,也就是向下跳五层,注意是立体的 得到 passwd1: ddwwxxssxaxwwaasasyywwdd 接着往下看 有一个加密函数IDA逆向常用宏定义_lodword-CSDN博客 unsigned __int64 __fastca…...

uniapp实现下拉过滤查询列表
<picker bindchange"bindPickerChanges" value"{{selectedIndex}}"range"{{pickerArray}}"range-key"name"><view class"area-select">在线状态:<label for"">{{pickerArray[select…...

C++—— set、map、multiset、multimap的介绍及使用
目录 关联式容器 关联式容器的特点和使用场景 树形结构与哈希结构 树形结构 哈希结构 键值对 set set的介绍 set的定义方式 set的使用 multiset map map的介绍 map的定义方式 map的使用 multimap 关联式容器 C标准模板库(STL)中的关联…...
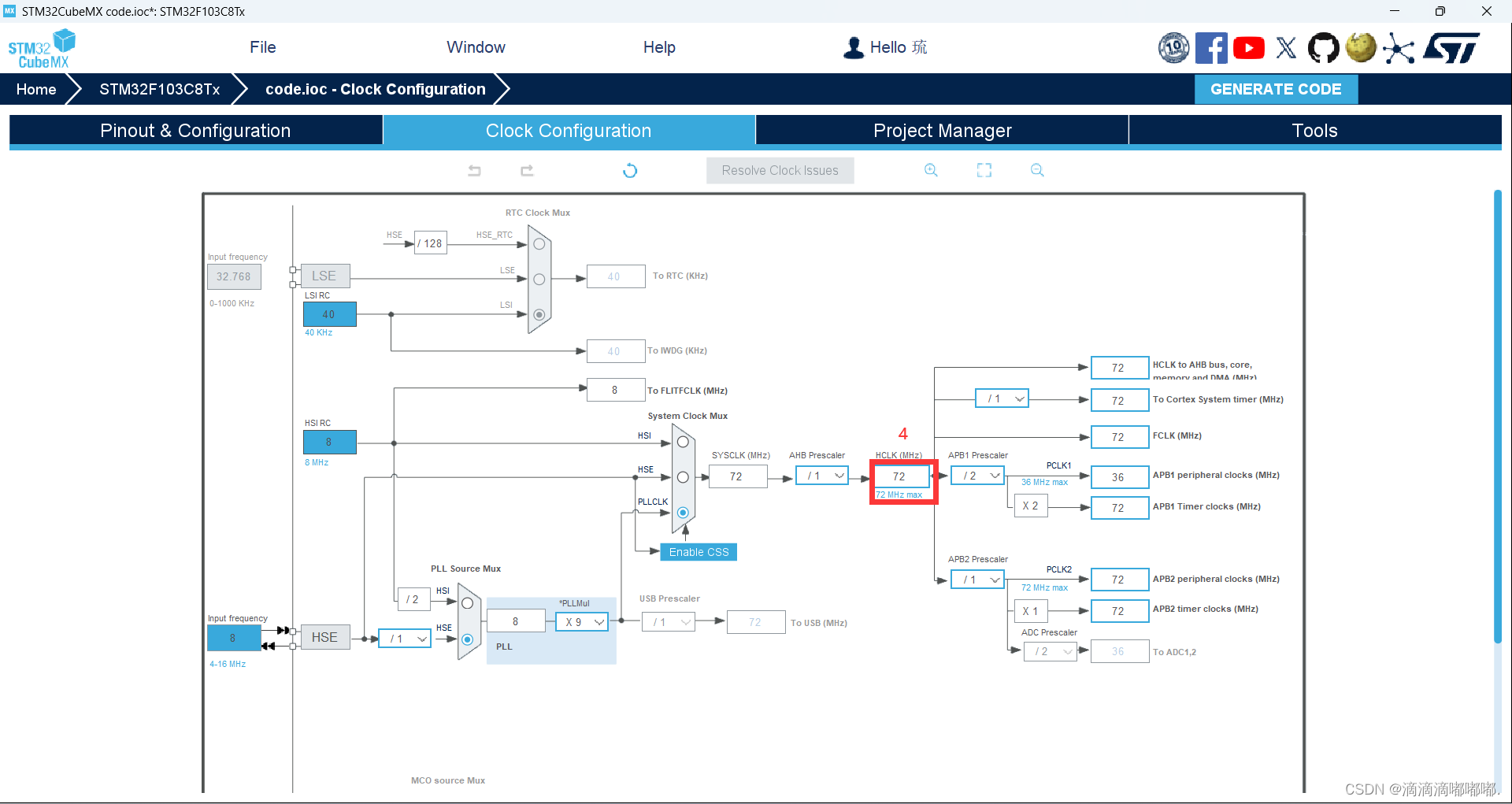
STM32 学习——1. STM32最小系统
这是一个最小系统的测试,LED灯会进行闪烁。选用PC13口,因为STM32F103C8T6 硬件开发板中,这个端口是一个LED 1. proteus8.15 原理图 2. cubemx 新建工程 3. keil 代码 while (1){HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);HAL_Delay(100);…...
react实现table可拖拽表头(给react-jss样式传递参数、滚动条样式)
目录 react实现table可拖拽表头安装依赖resizableTitle / index.tsxdrapTable.tsx使用DragTable 组件滚动条样式效果 react实现table可拖拽表头 安装依赖 yarn add react-resizable yarn add react-jssresizableTitle / index.tsx import { createUseStyles } from react-js…...

如何跨过robots协议的限制爬取内容?
在讨论如何“跨过robots协议的限制爬取内容”之前,重要的是强调遵循网络礼仪和法律法规的必要性。robots协议(Robots Exclusion Standard)是网站所有者向网络爬虫(包括搜索引擎和其他自动化工具)传达其爬取意愿的一种方…...

Parasoft C++Test软件静态分析操作指南_编码规范/标准检查
系列文章目录 Parasoft CTest软件安装指南 Parasoft CTest软件静态分析操作指南_编码规范/标准检查 Parasoft CTest软件静态分析操作指南_软件质量度量 Parasoft CTest软件静态分析_自动提取静态分析数据生成文档 Parasoft CTest软件单元测试_操作指南 Parasoft CTest软件单元…...

[AIGC] CompletableFuture如何实现任务链式调用?
Java 中的 CompletableFuture 提供了多种方法来支持任务链式调用。这些方法允许你将一组操作链接在一起,形成一个任务链,每一个任务只有在上一个任务成功完成后才会被执行。现在,我们来看一下一些常用的链接任务的方法: thenAppl…...
)
保姆级教程:在ArcGIS Pro插件中集成你的自定义工具箱(以‘消除重复要素’为例)
从脚本到按钮:ArcGIS Pro插件开发实战指南 在GIS日常工作中,我们常常会遇到一些重复性的数据处理任务。比如数据质检环节的"消除重复要素"操作,虽然可以通过Python脚本实现,但每次都需要打开IDE或Python窗口执行代码&am…...

除了排错,你可能不知道OPC Expert v8.1还能做这些:数据归档、计算与冗余实战
解锁OPC Expert v8.1的隐藏潜力:数据归档、实时计算与冗余架构实战指南在工业自动化领域,OPC Expert常被视为故障排查的"急救箱",但它的能力远不止于此。当大多数工程师还在用它解决DCOM配置问题时,少数先行者已经用它重…...
上午题回忆与解析(非标答版))
2026上半年数据库系统工程师(软考)上午题回忆与解析(非标答版)
本文为考后回忆整理,非官方标准答案,旨在为考后对答案及下半年备考的同学提供参考。题目顺序和表述可能与原卷有出入,欢迎在评论区指正、补充。📊 整体考情分析 刚结束的2026年上半年数据库系统工程师考试,上午题的风格…...

Taotoken如何帮助教育科技产品实现个性化学习辅导
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何帮助教育科技产品实现个性化学习辅导 1. 场景与挑战 教育科技公司在开发个性化学习助手时,常常面临一个核…...

HarmonyOS 6学习:解决图片放大后无法移动至边缘的matrix4矩阵变换技巧
从"卡在中间"到"自由拖拽":一次完整的图片缩放平移边界问题攻关在HarmonyOS 6应用开发中,我最近遇到了一个看似简单却让人头疼的图片查看器问题:用户双指放大图片后,想要拖动查看边缘细节,却发现图…...

树莓派工业GPIO接口板:电气隔离与电平转换实战指南
1. 项目概述:为什么需要一块工业级GPIO接口板?如果你用树莓派做过一些硬件项目,尤其是涉及到控制继电器、电机或者连接工业设备(比如PLC、变频器)时,大概率踩过这样的坑:直接用树莓派的GPIO引脚…...
)
DeepSeek安全测试辅助Prompt工程白皮书(含17个CVE靶场验证指令模板)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek安全测试辅助 DeepSeek系列大模型在代码生成、漏洞模式识别与安全上下文理解方面展现出独特优势,可作为安全测试工程师的智能协作者。其对OWASP Top 10、CWE分类体系及常见PoC结构具…...

taotoken用量看板如何帮助团队精细化管理api调用成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 taotoken用量看板如何帮助团队精细化管理api调用成本 对于团队管理者而言,将大模型能力集成到产品开发或业务流程中&am…...

基于Arduino UNO的真随机数生成与数据持久化在Tambola游戏机中的应用
1. 项目概述:用Arduino UNO打造一台全自动Tambola游戏机如果你玩过或者听说过Tambola(在印度非常流行的游戏,在欧美也叫Bingo或Housie),就知道它的核心玩法是主持人从一个装有数字球的容器中随机抽取号码,玩…...

计算机视觉的实战项目:从0到1搭建属于自己的图像识别系统
作为软件测试从业者,我们每天都在和各类功能验证、兼容性测试、自动化测试框架打交道,对AI领域的实战项目往往觉得“门槛高”“和日常工作不沾边”。但随着AI技术在互联网产品中的落地越来越深入,图像识别功能已经成为很多APP、智能硬件的核心…...