均衡后的SNRSINR
本文主要摘自参考文献中的前两篇,相关文献中经常会出现MIMO检测后的SINR不过一直没有找到相关数学推到过程,其中文献[1]中给出了相关原理在此仅做记录。
1. 系统模型
复信道模型
n t n_t nt 根发送天线, n r n_r nr 根接收天线的 MIMO 系统( n t < n r n_t<n_r nt<nr)。 x \mathbf{x} x 表示发送符号向量, x \mathbf{x} x 中的元素都来自于一个已知的字母表 A \mathbb{A} A 中(例如 QAM),即 x ∈ A n t \mathbf{x}\in\mathbb{A}^{n_t} x∈Ant ,并且 E [ x x H ] = I n t \mathbb{E}\left[\mathbf{xx}^H\right]=\mathbf{I}_{n_t} E[xxH]=Int ,接收信号向量 y ∈ C n r \mathbf{y}\in\mathbb{C}^{n_r} y∈Cnr,可以表示为:
y = H x + n (1.1) \mathbf{y=Hx+n} \tag{1.1} y=Hx+n(1.1)
其中 H ∈ C n r × n t \mathbf{H}\in\mathbb{C}^{n_r\times n_t} H∈Cnr×nt 表示 n r × n t n_r\times n_t nr×nt 大小的信道响应矩阵,其元素均建模为独立同分布的均值为 0 0 0 方差为 1 1 1 的复高斯随机变量。 n \mathbf{n} n 表示复的 AWGN 向量,并满足 E [ n n H ] = σ 2 I n r \mathbb{E}\left[\mathbf{nn}^H\right]=\sigma^2\mathbf{I}_{n_r} E[nnH]=σ2Inr,假设接收端知道正确的 H \mathbf{H} H,而发送端对 H \mathbf{H} H 一无所知。
有了以上的假设,系统模型 ( 1.1 ) (1.1) (1.1) 的似然函数可以写成:
p ( y ∣ H , x ) = 1 ( π σ 2 ) n r exp ( 1 σ 2 ∣ ∣ y − H x ∣ ∣ 2 ) (1.2) p(\mathbf{y|H,x})=\frac{1}{(\pi\sigma^2)^{n_r}}\exp\left(\frac{1}{\sigma^2}||\mathbf{y-Hx}||^2\right) \tag{1.2} p(y∣H,x)=(πσ2)nr1exp(σ21∣∣y−Hx∣∣2)(1.2)
实信道模型
( 1.1 ) (1.1) (1.1) 模型的实值等效系统模型为:
y r = H r x r + n r (1.3) \mathbf{y_r=H_rx_r+n_r} \tag{1.3} yr=Hrxr+nr(1.3)
其中
H r ≜ [ ℜ ( H ) − ℑ ( H ) ℑ ( H ) ℜ ( H ) ] ∈ R 2 n r × 2 n t , y r ≜ [ ℜ ( y ) T ℑ ( y ) T ] T ∈ R 2 n r , x r ≜ [ ℜ ( x ) T ℑ ( x ) T ] T ∈ R 2 n t , n r ≜ [ ℜ ( n ) T ℑ ( n ) T ] T ∈ R 2 n t . \mathbf{H_r}\triangleq\begin{bmatrix} \Re(\mathbf{H}) & -\Im(\mathbf{H})\\\\ \Im(\mathbf{H}) & \Re(\mathbf{H}) \end{bmatrix}\in\mathbb{R}^{2n_r\times 2n_t},\quad \mathbf{y_r}\triangleq\begin{bmatrix}\Re(\mathbf{y})^T & \Im(\mathbf{y})^T\end{bmatrix}^T\in\mathbb{R}^{2n_r},\\\\ \mathbf{x_r}\triangleq\begin{bmatrix}\Re(\mathbf{x})^T & \Im(\mathbf{x})^T\end{bmatrix}^T\in\mathbb{R}^{2n_t},\quad \mathbf{n_r}\triangleq\begin{bmatrix}\Re(\mathbf{n})^T & \Im(\mathbf{n})^T\end{bmatrix}^T\in\mathbb{R}^{2n_t}. Hr≜ ℜ(H)ℑ(H)−ℑ(H)ℜ(H) ∈R2nr×2nt,yr≜[ℜ(y)Tℑ(y)T]T∈R2nr,xr≜[ℜ(x)Tℑ(x)T]T∈R2nt,nr≜[ℜ(n)Tℑ(n)T]T∈R2nt.
注意:实值模型 ( 1.3 ) (1.3) (1.3) 中 x r \mathbf{x_r} xr 的元素都来自于 PAM 字母表,这个 PAM 字母表是由复值模型 ( 1.1 ) (1.1) (1.1) 的 QAM 字母表转换得到的。
注解:公式 ( 1.2 ) (1.2) (1.2) 的来由
在复值模型 ( 1.1 ) (1.1) (1.1) 中, n \mathbf{n} n 满足 E [ n n H ] = σ 2 I n r \mathbb{E}\left[\mathbf{nn}^H\right]=\sigma^2\mathbf{I}_{n_r} E[nnH]=σ2Inr ,对于 n \mathbf{n} n 中的元素 n = n r + i n i n=n_r+in_i n=nr+ini 来说,其方差 D [ n ] = σ 2 \mathbb{D}\left[n\right]=\sigma^2 D[n]=σ2,同时有:
D [ n ] = 2 D [ n r ] = 2 D [ n i ] \mathbb{D}\left[n\right]=2\mathbb{D}\left[n_r\right]=2\mathbb{D}\left[n_i\right] D[n]=2D[nr]=2D[ni]
n n n 的概率密度函数为:
p ( n ) = 1 π σ 2 exp ( − n 2 σ 2 ) p(n)=\frac{1}{\pi\sigma^2}\exp\left(-\frac{n^2}{\sigma^2}\right) p(n)=πσ21exp(−σ2n2)
接收信号 y \mathbf{y} y 的元素可以表示为:
y i = h i T ⋅ x + n i y_i=\mathbf{h}_i^T\cdot\mathbf{x}+n_i yi=hiT⋅x+ni
其中 h i \mathbf{h}_i hi 表示 H \mathbf{H} H 的第 i i i 行。对于给定的 h i \mathbf{h}_i hi 和 x \mathbf{x} x , y i y_i yi 相当于是均值为 h i T ⋅ x \mathbf{h}_i^T\cdot\mathbf{x} hiT⋅x ,方差为 σ 2 \sigma^2 σ2 的复高斯随机变量,那么其似然函数就是:
p ( y i ∣ h i , x ) = 1 π σ 2 exp ( − ( y i − h i T ⋅ x ) 2 σ 2 ) = 1 π σ 2 exp ( − n i 2 σ 2 ) = p ( n i ) p(y_i|\mathbf{h}_i,\mathbf{x})=\frac{1}{\pi\sigma^2}\exp\left(-\frac{(y_i-\mathbf{h}_i^T\cdot\mathbf{x})^2}{\sigma^2}\right)=\frac{1}{\pi\sigma^2}\exp\left(-\frac{n_i^2}{\sigma^2}\right)=p(n_i) p(yi∣hi,x)=πσ21exp(−σ2(yi−hiT⋅x)2)=πσ21exp(−σ2ni2)=p(ni)对于接收向量 y \mathbf{y} y 来说, y i , i = 1 , 2 , . . . , n r y_i,i=1,2,...,n_r yi,i=1,2,...,nr 之间是相互独立的,所以:
p ( y ∣ H , x ) = ∏ i = 1 n r p ( y i ∣ h i , x ) = 1 ( π σ 2 ) n r exp ( 1 σ 2 ∣ ∣ y − H x ∣ ∣ 2 ) = 1 ( π σ 2 ) n r exp ( 1 σ 2 ∣ ∣ n ∣ ∣ 2 ) p(\mathbf{y|H,x})=\prod_{i=1}^{n_r} p(y_i|\mathbf{h}_i,\mathbf{x})=\frac{1}{(\pi\sigma^2)^{n_r}}\exp\left(\frac{1}{\sigma^2}||\mathbf{y-Hx}||^2\right)=\frac{1}{(\pi\sigma^2)^{n_r}}\exp\left(\frac{1}{\sigma^2}||\mathbf{n}||^2\right) p(y∣H,x)=i=1∏nrp(yi∣hi,x)=(πσ2)nr1exp(σ21∣∣y−Hx∣∣2)=(πσ2)nr1exp(σ21∣∣n∣∣2)
SNR 定义
SNR 定义如下:
S N R = E [ ∣ ∣ H x ∣ ∣ 2 2 ] E [ ∣ ∣ n ∣ ∣ 2 2 ] = E [ t r ( H x ( H x ) H ) ] E [ t r ( n n H ) ] = t r ( H E [ x x H ] H H ) t r ( E [ n n H ] ) = t r ( H H H ) N r × σ 2 SNR = \frac{\mathbb{E}\left[||\mathbf{Hx}||^2 _2\right]}{\mathbb{E}\left[||\mathbf{n}||^2 _2\right]} = \frac{\mathbb{E}\left[tr(\mathbf{Hx}(\mathbf{Hx})^H)\right]}{\mathbb{E}\left[tr(\mathbf{nn}^H)\right]} = \frac{tr\left(\mathbf{H}\mathbb{E}\left[\mathbf{xx}^H\right]\mathbf{H}^H\right)}{tr\left(\mathbb{E}\left[\mathbf{nn}^H\right]\right)} = \frac{tr(\mathbf{HH}^H)}{N_r\times \sigma^2} SNR=E[∣∣n∣∣22]E[∣∣Hx∣∣22]=E[tr(nnH)]E[tr(Hx(Hx)H)]=tr(E[nnH])tr(HE[xxH]HH)=Nr×σ2tr(HHH)
注:信道响应矩阵的元素 h i j h_{ij} hij 满足 h i j ∼ C N ( 0 , 1 ) h_{ij}\sim CN(0,1) hij∼CN(0,1) , 但每次计算信噪比时 H \mathbf{H} H 视为已知。
2. 最优检测
在接收端,检测机对发送信号进行估计,的到发送信号的估计值 x ^ \hat{\mathbf{x}} x^ ,能够让平均错误概率 p ( x ^ ≠ x ) p(\mathbf{\hat{x}\neq x}) p(x^=x) 最小的检测器为性能最优的检测器。最大似然(ML)检测器通过穷举解出使得 y \mathbf{y} y 和 H x \mathbf{Hx} Hx 的欧式距离最小的 x \mathbf{x} x 可以达到最优性能,其中 x ∈ A n t \mathbf{x}\in \mathbb{A}^{n_t} x∈Ant 。即:
x M L ^ = arg min x ∈ A n t ∣ ∣ y − H x ∣ ∣ 2 (2.1) \mathbf{\hat{x_{ML}}} = \mathop{\arg\min} \limits_{ \mathbf{x} \in \mathbb{A}^{n_t} } ||\mathbf{y-Hx}||^2 \tag{2.1} xML^=x∈Antargmin∣∣y−Hx∣∣2(2.1)
穷举方法求解 ( 2.1 ) (2.1) (2.1) 的计算复杂度随 n t n_t nt 呈指数级增长,ML 检测器通常作为衡量其他检测器性能的基准。但是当 n t n_t nt 很大时,ML 检测器因其计算复杂度之高而变得不可实现。
在 ML 不好实现时,可以使用一些低复杂度场景下的 ML 性能曲线作为 MIMO 场景下的 ML 性能曲线的界限。例如,大 n t n_t nt 情况下,非衰落的 SISO-AWGN 的 ML 性能曲线可以作为 MIMO场景 ML 性能的下界。
3. 线性检测
线性检测通过对接收信号进行线性变换估计出软的发送符号,再由软符号映射到硬符号,即: x ^ = f ( G y ) \mathbf{\hat{x}}=f(\mathbf{Gy}) x^=f(Gy) ,其中 G \mathbf{G} G 为变换矩阵, f ( . ) f(.) f(.) 表示软符号到硬符号的映射函数,映射方法就是把 G y \mathbf{Gy} Gy 的每一个元素映射为字母表 A \mathbb{A} A 中与该元素距离最近的符号。线性检测的最大优势就是其复杂度低。
MF 检测器
MF 检测器在检测某一个发送符号时,把其他所有的发送符号都看作噪声。通过信道之间的相关性去消除其他发送符号的干扰。定义 h i , i = 1 , 2 , . . . , n t \mathbf{h}_i,i=1,2,...,n_t hi,i=1,2,...,nt 表示信道矩阵 H \mathbf{H} H 的第 i i i 列。则系统模型 1.1 1.1 1.1 可以写成如下形式:
y = H x + n = ∑ i = 1 n t h i x i + n = h k x k + ∑ i = 1 i ≠ k n t h i x i + n (3.1) \mathbf{y=Hx+n}=\sum_{i=1}^{n_t}\mathbf{h}_ix_i+n = \mathbf{h}_kx_k + \sum _{i=1\ i \neq k} ^{n_t} \mathbf{h}_ix_i+n \tag{3.1} y=Hx+n=i=1∑nthixi+n=hkxk+i=1 i=k∑nthixi+n(3.1)
式 ( 3.1 ) (3.1) (3.1) 中的第一项是第 k k k 个发送符号 x k x_k xk 对接收信号 y \mathbf{y} y 贡献的部分,第二项是其他发送符号贡献的部分,那么在考虑检测符号 x k x_k xk 时,其他发送符号的部分(式 ( 3.1 ) (3.1) (3.1) 的第二项)就是干扰。MF 检测器在检测时将这些干扰看作是噪声,通过以下方式去估计软符号:
x ~ = h k ∗ y (3.2) \tilde{x}=\mathbf{h}^*_k\mathbf{y} \tag{3.2} x~=hk∗y(3.2)
其中 h k ∗ \mathbf{h}^*_k hk∗ 表示向量 h k \mathbf{h}_k hk 的共轭转置,写成向量的形式,MF 检测器的检测方程为:
x ~ M F = H H y (3.3) \tilde{\mathbf{x}}_{MF}=\mathbf{H}^H\mathbf{y}\tag{3.3} x~MF=HHy(3.3)
MF 检测器的变换矩阵 G M F = H H \mathbf{G}_{MF}=\mathbf{H}^H GMF=HH ,计算 ( 3.3 ) (3.3) (3.3) 的复杂度为 n t n r n_tn_r ntnr 。对于轻载系统( n t ≪ n r n_t\ll n_r nt≪nr ) MF 检测器的性能接近最优,但是它的性能会随着 n t n_t nt 的增长而严重下降,因为随着 n t n_t nt 增长,干扰会增多。
注解: ( 3.2 ) (3.2) (3.2) 的展开
x ~ = h k ∗ y = h k ∗ h k x k + ∑ i = 1 i ≠ k n t h k ∗ h i x i + h k ∗ n \tilde{x} = \mathbf{h}_k^* \mathbf{y} =\mathbf{h}_k^* \mathbf{h}_k x_k + \sum _{i=1\ i \neq k} ^{n_t} \mathbf{h}_k^* \mathbf{h}_i x_i + \mathbf{h}_k^* n x~=hk∗y=hk∗hkxk+i=1 i=k∑nthk∗hixi+hk∗n
忽略噪声,从相关性的角度来说: E [ h k ∗ h k ] = 1 , E [ h k ∗ h i ] = 0 \mathbf{E}\left[ \mathbf{h}_k^* \mathbf{h}_k \right]=1,\mathbf{E}\left[ \mathbf{h}_k^* \mathbf{h}_i \right]=0 E[hk∗hk]=1,E[hk∗hi]=0 。所以 h k ∗ y \mathbf{h}_k^* \mathbf{y} hk∗y 可以消除一部分干扰,当 n t n_t nt 较小时,随机变量 ∑ i = 1 , i ≠ k n t h k ∗ h i x i \sum _{i=1,i \neq k} ^{n_t}\mathbf{h}_k^* \mathbf{h}_i x_i ∑i=1,i=knthk∗hixi 的方差比较小且均值为 0 0 0 ,此时可以很好的消除干扰,但是当 n t n_t nt 较大时,随机变量 ∑ i = 1 , i ≠ k n t h k ∗ h i x i \sum _{i=1,i \neq k} ^{n_t}\mathbf{h}_k^* \mathbf{h}_i x_i ∑i=1,i=knthk∗hixi 的方差会因为叠加而增大,方差大了,干扰就除“不干净了”,性能自然就下降了。
ZF 检测器
ZF 检测器使用信道矩阵 H \mathbf{H} H 的伪逆作为变换矩阵。令维度为 n t × n r n_t\times n_r nt×nr 的 Q \mathbf{Q} Q 矩阵代表信道矩阵 H \mathbf{H} H 的伪逆,有:
Q = ( H H H ) − 1 H H (3.4) \mathbf{Q}=(\mathbf{H}^H\mathbf{H})^{-1}\mathbf{H}^H \tag{3.4} Q=(HHH)−1HH(3.4)
因为 Q H = I n t \mathbf{QH=I}_{n_t} QH=Int , Q y \mathbf{Qy} Qy 可以完全消除其他符号带来的干扰,但是在完全消除干扰的同时也增加了噪声。
令 q k , k = 1 , 2 , . . . , n t \mathbf{q}_k,k=1,2,...,n_t qk,k=1,2,...,nt 表示 Q \mathbf{Q} Q 的第 k k k 行,那么, q k H \mathbf{q}_k\mathbf{H} qkH 是一个 n t n_t nt 长的行向量,并且它除了第 k k k 个元素是 1 1 1 之外其他元素都是 0 0 0 。发送符号 x k \mathbf{x}_k xk 的软估计可以写成:
x ~ k = q k y = q k H x + q k n = x k + q k n (3.5) \tilde{x}_k=\mathbf{q}_k\mathbf{y}=\mathbf{q}_k\mathbf{Hx}+\mathbf{q}_k\mathbf{n}=x_k+\mathbf{q}_k\mathbf{n} \tag{3.5} x~k=qky=qkHx+qkn=xk+qkn(3.5)
式 ( 3.5 ) (3.5) (3.5) 中的 SNR 为:
S N R k = ∣ x k ∣ 2 ∣ ∣ q k ∣ ∣ 2 σ 2 SNR_k = \frac{|x_k|^2}{||\mathbf{q}_k||^2\sigma^2} SNRk=∣∣qk∣∣2σ2∣xk∣2
所以说 ZF 检测在消除干扰的同时给噪声功率乘上了 ∣ ∣ q k ∣ ∣ 2 ||\mathbf{q}_k||^2 ∣∣qk∣∣2 ,增强了噪声。在低信噪比条件下( σ 2 \sigma^2 σ2 很大),噪声增强大大降低了性能,使得此时 ZF 检测算法性能要比 MF 的性能差;在高信噪比条件下( σ 2 \sigma^2 σ2 很小),完全消除干扰使得 ZF 检测器的性能要优于 MF 检测器。ZF 检测器的变换公式为:
x ~ Z F = Q y \tilde{\mathbf{x}}_{ZF}=\mathbf{Qy} x~ZF=Qy
ZF 检测器的变换矩阵 G Z F = Q \mathbf{G}_{ZF}=\mathbf{Q} GZF=Q ,其计算复杂度是 n t n_t nt 的立方级别(因为要求伪逆),所以每个符号的复杂度就是 n t 2 n_t^2 nt2 ,这虽然比 MF 检测算法的复杂度高了一阶,但是在大规模 MIMO 场景仍然有吸引力。与 MF 相同,在中等到重载情景,随 n t n_t nt 增长,ZF 检测的性能也会严重下降。
MMSE 检测器
MMSE 检测器的变换矩阵 G M M S E \mathbf{G}_{MMSE} GMMSE 是下式的解:
min G E [ ∣ ∣ x − G y ∣ ∣ 2 ] (3.6) \mathop{\min} \limits_{ \mathbf{G} } \mathbb{E}\left[||\mathbf{x-Gy}||^2\right]\tag{3.6} GminE[∣∣x−Gy∣∣2](3.6)
式 ( 3.6 ) (3.6) (3.6) 的解为:
G M M S E = ( H H H + σ 2 I n t ) − 1 H H (3.7) \mathbf{G}_{MMSE} = \left( \mathbf{H}^H \mathbf{H} + \sigma^2 \mathbf{I} _{n_t} \right)^{-1} \mathbf{H}^H \tag{3.7} GMMSE=(HHH+σ2Int)−1HH(3.7)
MMSE 检测的变换公式为:
x ~ M M S E = G M M S E y \tilde{\mathbf{x}} _{MMSE} = \mathbf{G} _{MMSE} \mathbf{y} x~MMSE=GMMSEy
MMSE 检测器组合了 MF 和 ZF 的优点。在高信噪比条件下( σ \sigma σ 很小),MMSE 的表现和 ZF 一样,因为此时式 ( 3.7 ) (3.7) (3.7) 的第二项变得很小而无关紧要;在低信噪比条件下( σ \sigma σ 很大),MMSE 的表现很像 MF,因为随着 σ → ∞ \sigma\to\infty σ→∞ , H H H + σ 2 I n t \mathbf{H}^H\mathbf{H}+\sigma^2\mathbf{I}_{nt} HHH+σ2Int 的对角线上的元素会越来越突出,它的逆矩阵就会趋向一个对角矩阵。
MMSE 检测器的性能在所有的 SNR 上都要优于 MF 和 ZF 。但是 MMSE 需要知道噪声的方差 σ 2 \sigma^2 σ2 ,而 MF 和 ZF 则不需要。MMSE 也需要求逆,所以它的每符号的复杂度为 n t 2 n_t^2 nt2 。在中载到重载情景,MMSE 的性能也会随着 n t n_t nt 的增长而下降。
注解: 式 ( 3.6 ) (3.6) (3.6) 的求解过程参见 MMSE检测算法推导
链接中给出的解为
G M M S E = H H ( H H H + σ 2 I n t ) − 1 \mathbf{G}_{MMSE} = \mathbf{H}^H \left( \mathbf{H} \mathbf{H}^H + \sigma^2 \mathbf{I} _{n_t} \right)^{-1} GMMSE=HH(HHH+σ2Int)−1
其与上文中的解是相等的,但是上文中的解的形式可以方便的与 MF、ZF 的变换矩阵作比较。
证明:
( H H H + σ 2 I n t ) − 1 H H = ( ( H H ) − 1 ( H H H + σ 2 I n t ) ) − 1 = ( H + ( H H ) − 1 σ 2 I n t ) − 1 = ( H + σ 2 I n t ( H H ) − 1 ) − 1 = ( ( H H H + σ 2 I n t ) ( H H ) − 1 ) − 1 = H H ( H H H + σ 2 I n t ) − 1 \begin{aligned} \left( \mathbf{H}^H \mathbf{H} + \sigma^2 \mathbf{I} _{n_t} \right)^{-1} \mathbf{H}^H &= \left( (\mathbf{H}^H)^{-1} (\mathbf{H}^H \mathbf{H} + \sigma^2 \mathbf{I} _{n_t}) \right)^{-1} \\ &= \left( \mathbf{H} + (\mathbf{H}^H)^{-1}\sigma^2 \mathbf{I} _{n_t} \right)^{-1} \\ &= \left( \mathbf{H} + \sigma^2 \mathbf{I} _{n_t} (\mathbf{H}^H)^{-1} \right)^{-1} \\ &= \left( (\mathbf{H} \mathbf{H}^H + \sigma^2 \mathbf{I} _{n_t}) (\mathbf{H}^H)^{-1} \right)^{-1} \\ &=\mathbf{H}^H \left( \mathbf{H} \mathbf{H}^H + \sigma^2 \mathbf{I} _{n_t} \right)^{-1} \end{aligned} (HHH+σ2Int)−1HH=((HH)−1(HHH+σ2Int))−1=(H+(HH)−1σ2Int)−1=(H+σ2Int(HH)−1)−1=((HHH+σ2Int)(HH)−1)−1=HH(HHH+σ2Int)−1
线性检测的信干噪比 SINR
经过线性检测 x ^ = Q y \mathbf{\hat{x}=Qy} x^=Qy 后,第 k k k 个接收符号 x k x_k xk 的软估计值可以写成:
x ~ k = q k y = q k H x + q k n = q k ∑ i = 1 N t h i x i + q k n (3.8) \tilde{x}_k = \mathbf{q}_k \mathbf{y} = \mathbf{q}_k \mathbf{Hx} + \mathbf{q}_k \mathbf{n} = \mathbf{q}_k \sum _{i=1} ^{N_t}\mathbf{h_ix_i}+\mathbf{q}_k\mathbf{n} \tag{3.8} x~k=qky=qkHx+qkn=qki=1∑Nthixi+qkn(3.8)
其中 q k \mathbf{q_k} qk 是变换矩阵 Q \mathbf{Q} Q 的第 k k k 行, h i \mathbf{h_i} hi 是信道矩阵 H \mathbf{H} H 的第 k k k 列,则接收符号 x k x_k xk 的信干噪比 SINR 可以写成:
S I N R k = ∣ q k h k ∣ 2 ∣ x k ∣ 2 ∑ i = 1 , i ≠ k N t ∣ q k h i ∣ 2 ∣ x i ∣ 2 + ∣ ∣ q k ∣ ∣ 2 σ 2 (3.9) SINR_k = \frac{|\mathbf{q_kh_k}|^2|x_k|^2}{\sum_{i=1,i\neq k} ^{N_t}|\mathbf{q_kh_i}|^2|x_i|^2 + ||\mathbf{q_k}||^2\sigma^2} \tag{3.9} SINRk=∑i=1,i=kNt∣qkhi∣2∣xi∣2+∣∣qk∣∣2σ2∣qkhk∣2∣xk∣2(3.9)
MF、ZF、MMSE 检测算法都满足式 ( 3.9 ) (3.9) (3.9) ,ZF 检测算法因为完全消除了干扰所以其 SINR 在 ( 3.9 ) (3.9) (3.9) 的基础上做了简化, 如式 ( 3.5 ) (3.5) (3.5) 所示。
SINR进一步简化
破零算法信噪比简化
我们知道破零算法的均衡矩阵 W = ( H H H ) − 1 H H W=(H^HH)^{-1}H^H W=(HHH)−1HH,所以均衡后的 X ^ \hat{X} X^为:
X ^ = ( H H H ) − 1 H H ( H X + N ) = ( H H H ) − 1 H H H X + ( H H H ) − 1 H H N = X + N ^ \begin{aligned} \hat{X} &= (H^HH)^{-1}H^H(HX+N)\\ &= (H^HH)^{-1}H^HHX+(H^HH)^{-1}H^HN \\ &= X+\hat{N} \end{aligned} X^=(HHH)−1HH(HX+N)=(HHH)−1HHHX+(HHH)−1HHN=X+N^
其中 N ^ = ( H H H ) − 1 H H N \hat{N}=(H^HH)^{-1}H^HN N^=(HHH)−1HHN表示均衡后的噪声列向量。
由于破零算法没有流间信号干扰因此,信干比SINR就是信噪比SNR。
E { N ^ N ^ H } l l = E [ ( H H H ) − 1 H H N ( ( H H H ) − 1 H H N ) H ] l l = E [ ( H H H ) − 1 H H N N H H ( H H H ) − 1 ] l l = [ ( H H H ) − 1 H H E { N N H } H ( H H H ) − 1 ] l l = [ σ 2 ( H H H ) − 1 H H H ( H H H ) − 1 ] l l = σ 2 [ ( H H H ) − 1 ] l l \begin{aligned} E\{\hat{N}\hat{N}^H\}_{ll}&=E[(H^HH)^{-1}H^HN((H^HH)^{-1}H^HN)^H]_{ll}\\ &=E[(H^HH)^{-1}H^HNN^HH(H^HH)^{-1}]_{ll}\\ &=[(H^HH)^{-1}H^HE\{NN^H\}H(H^HH)^{-1}]_{ll}\\ &=[\sigma^2(H^HH)^{-1}H^HH(H^HH)^{-1}]_{ll}\\ &=\sigma^2[(H^HH)^{-1}]_{ll} \end{aligned} E{N^N^H}ll=E[(HHH)−1HHN((HHH)−1HHN)H]ll=E[(HHH)−1HHNNHH(HHH)−1]ll=[(HHH)−1HHE{NNH}H(HHH)−1]ll=[σ2(HHH)−1HHH(HHH)−1]ll=σ2[(HHH)−1]ll
由此可得 S N R Z F = 1 σ 2 [ ( H H H ) − 1 ] l l \mathbf {SNR_{ZF}=\frac{1}{\sigma^2[(H^HH)^{-1}]_{ll}}} SNRZF=σ2[(HHH)−1]ll1
MMSE 均衡后的简化SINR
我们知道MMSE均衡算法的 W 为: \mathbf W为: W为:
W = ( H H H + σ 2 I ) − 1 H H \begin{aligned} \mathbf{W=(H^HH+\sigma^2I)^{-1}H^H} \end{aligned} W=(HHH+σ2I)−1HH
则估计得到的信号 X ^ \hat{X} X^为:
X ^ = W Y = ( H H H + σ 2 I ) − 1 H H ( H X + N ) = ( H H H + σ 2 I ) − 1 H H H X + ( H H H + σ 2 I ) − 1 H H N \begin{aligned} \hat{\mathbf X}&=\mathbf {WY=(H^HH+\sigma^2I)^{-1}H^H(HX+N)}\\ &=\mathbf{(H^HH+\sigma^2I)^{-1}H^HHX+(H^HH+\sigma^2I)^{-1}H^HN} \end{aligned} X^=WY=(HHH+σ2I)−1HH(HX+N)=(HHH+σ2I)−1HHHX+(HHH+σ2I)−1HHN
噪声能量
MMSE 最终没有完全消除流间干扰。所以MMSE均衡后的信干比包含了流间干扰和噪声。
E { N ^ N ^ H } = E { ( ( H H H + σ 2 I ) − 1 H H N ) ( ( H H H + σ 2 I ) − 1 H H N ) H } = E { ( H H H + σ 2 I ) − 1 H H N N H H ( H H H + σ 2 I ) − 1 } = σ 2 ( H H H + σ 2 I ) − 1 H H H ( H H H + σ 2 I ) − 1 \begin{aligned} E\{\hat{N}\hat{N}^H\}&=E\{((H^HH+\sigma^2I)^{-1}H^HN)((H^HH+\sigma^2I)^{-1}H^HN)^H\}\\ &=E\{(H^HH+\sigma^2I)^{-1}H^HNN^HH(H^HH+\sigma^2I)^{-1}\}\\ &=\sigma^2(H^HH+\sigma^2I)^{-1}H^HH(H^HH+\sigma^2I)^{-1} \end{aligned} E{N^N^H}=E{((HHH+σ2I)−1HHN)((HHH+σ2I)−1HHN)H}=E{(HHH+σ2I)−1HHNNHH(HHH+σ2I)−1}=σ2(HHH+σ2I)−1HHH(HHH+σ2I)−1
H H H H^HH HHH为共轭对称矩阵,进行特征分解 H H H = Q H Λ Q H^HH=Q^H\Lambda Q HHH=QHΛQ其中Q为酉矩阵即 Q H Q = I Q^HQ=I QHQ=I带入噪声协方差矩阵:
E { N ^ N ^ H } = σ 2 ( Q H Λ Q + σ 2 I ) − 1 Q H Λ Q ( Q H Λ Q + σ 2 I ) − 1 = σ 2 Q H ( Λ + σ 2 I ) Q Q H Λ Q Q H ( Λ + σ 2 I ) − 1 Q = σ 2 Q H ( Λ + σ 2 I ) Λ ( Λ + σ 2 I ) − 1 Q \begin{aligned} E\{\hat{N}\hat{N}^H\}&=\sigma^2(Q^H\Lambda Q+\sigma^2I)^{-1}Q^H\Lambda Q(Q^H\Lambda Q+\sigma^2I)^{-1}\\ &=\sigma^2Q^H(\Lambda+\sigma^2I)QQ^H\Lambda QQ^H(\Lambda+\sigma^2I)^{-1}Q\\ &=\sigma^2Q^H(\Lambda+\sigma^2I)\Lambda(\Lambda+\sigma^2I)^{-1}Q \end{aligned} E{N^N^H}=σ2(QHΛQ+σ2I)−1QHΛQ(QHΛQ+σ2I)−1=σ2QH(Λ+σ2I)QQHΛQQH(Λ+σ2I)−1Q=σ2QH(Λ+σ2I)Λ(Λ+σ2I)−1Q
令 Q = [ q 1 , q 2 , q 3 , ⋯ , q l , ⋯ ] Q=[q_{1},q_{2},q_{3} ,\cdots ,q_{l},\cdots] Q=[q1,q2,q3,⋯,ql,⋯],其中 q l q_{l} ql是其第 l l l个列向量,则第 l l l流噪声功率为噪声协方差矩阵的第 l l l列和第 l l l行的元素即:
p n o i s e = σ 2 q l H ( Λ + σ 2 I ) − 1 Λ ( Λ + σ 2 I ) − 1 q l \begin{aligned} \mathbf {p_{noise} =\sigma^2q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}} \end{aligned} pnoise=σ2qlH(Λ+σ2I)−1Λ(Λ+σ2I)−1ql
信号+干扰能量
R x x = E { ( H H H + σ 2 I ) − 1 H H H X ( ( H H H + σ 2 I ) − 1 H H H X ) H } = E { ( H H H + σ 2 I ) − 1 H H H X X H H H H ( H H H + σ 2 I ) − 1 } = ( H H H + σ 2 I ) − 1 H H H H H H ( H H H + σ 2 I ) − 1 = Q H ( Λ + σ 2 I ) − 1 Q Q H Λ Q Q H Λ Q Q H ( Λ + σ 2 I ) − 1 Q = Q H ( Λ + σ 2 I ) Λ 2 ( Λ + σ 2 I ) − 1 Q \begin{aligned} R_{xx} &= E\{\mathbf{(H^HH+\sigma^2I)^{-1}H^HHX((H^HH+\sigma^2I)^{-1}H^HHX)^H}\}\\ &=E\{\mathbf{(H^HH+\sigma^2I)^{-1}H^HHXX^HH^HH(H^HH+\sigma^2I)^{-1}}\}\\ &=\mathbf{(H^HH+\sigma^2I)^{-1}H^HHH^HH(H^HH+\sigma^2I)^{-1}}\\ &=\mathbf{Q^H(\Lambda+\sigma^2I)^{-1}QQ^H\Lambda QQ^H\Lambda QQ^H(\Lambda+\sigma^2I)^{-1}Q}\\ &=\mathbf{Q^H(\Lambda+\sigma^2I)\Lambda^2(\Lambda+\sigma^2I)^{-1}Q} \end{aligned} Rxx=E{(HHH+σ2I)−1HHHX((HHH+σ2I)−1HHHX)H}=E{(HHH+σ2I)−1HHHXXHHHH(HHH+σ2I)−1}=(HHH+σ2I)−1HHHHHH(HHH+σ2I)−1=QH(Λ+σ2I)−1QQHΛQQHΛQQH(Λ+σ2I)−1Q=QH(Λ+σ2I)Λ2(Λ+σ2I)−1Q
协方差矩阵的第 l l l行第 l l l列即为噪声+干扰的总功率即:
p ( i n t e r + s i g n a l ) = q l H ( Λ + σ 2 I ) − 1 Λ 2 ( Λ + σ 2 I ) − 1 q l p_{(inter+signal)}=\mathbf{q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda^{2}(\Lambda+\sigma^2I)^{-1}q_{\mathit l}} p(inter+signal)=qlH(Λ+σ2I)−1Λ2(Λ+σ2I)−1ql
信号功率
信号 X X X的系数为:
G = ( H H H + σ 2 I ) − 1 H H H = Q H ( Λ + σ 2 I ) − 1 Q Q H Λ Q = Q H ( Λ + σ 2 I ) − 1 Λ Q \begin{aligned} G&=\mathbf{(H^HH+\sigma^2I)^{-1}H^HH=Q^H(\Lambda+\sigma^2I)^{-1}QQ^H \Lambda Q} \\ &=\mathbf{Q^H(\Lambda+\sigma^2I)^{-1}\Lambda Q} \end{aligned} G=(HHH+σ2I)−1HHH=QH(Λ+σ2I)−1QQHΛQ=QH(Λ+σ2I)−1ΛQ
上面第 l l l行即为信号系数所以
X l = q l H ( Λ + σ 2 I ) − 1 Λ q l X_{l}=\mathbf{q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda q_{\mathit l}} Xl=qlH(Λ+σ2I)−1Λql
所以信号能量为:
p s i g n a l = q l H ( Λ + σ 2 I ) − 1 Λ q l q l H Λ ( Λ + σ 2 I ) − 1 q l \begin{aligned} p_{signal}=\mathbf{q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda q_{\mathit l}q_{l}^H\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}} \end{aligned} psignal=qlH(Λ+σ2I)−1ΛqlqlHΛ(Λ+σ2I)−1ql
干扰信号功率
p i n t e r = p ( i n t e r + s i g n a l ) − p s i g n a l = q l H ( Λ + σ 2 I ) − 1 Λ 2 ( Λ + σ 2 I ) − 1 q l − q l H ( Λ + σ 2 I ) − 1 Λ q l q l H Λ ( Λ + σ 2 I ) − 1 q l = q l H ( Λ + σ 2 I ) − 1 Λ ( I − q l q l H ) Λ ( Λ + σ 2 I ) − 1 q l \begin{aligned} p_{inter}&=p_{(inter+signal)}-p_{signal}\\ &=\mathbf{q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda^{2}(\Lambda+\sigma^2I)^{-1}q_{\mathit l}}-\mathbf{q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda q_{\mathit l}q_{l}^H\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}}\\ &=\mathbf{q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda(I-q_{\mathit l}q_{\mathit l}^H)\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}} \end{aligned} pinter=p(inter+signal)−psignal=qlH(Λ+σ2I)−1Λ2(Λ+σ2I)−1ql−qlH(Λ+σ2I)−1ΛqlqlHΛ(Λ+σ2I)−1ql=qlH(Λ+σ2I)−1Λ(I−qlqlH)Λ(Λ+σ2I)−1ql
干扰+噪声功率
p i n t e r + p n o i s e = σ 2 q l H ( Λ + σ 2 I ) − 1 Λ ( Λ + σ 2 I ) − 1 q l + q l H ( Λ + σ 2 I ) − 1 Λ ( I − q l q l H ) Λ ( Λ + σ 2 I ) − 1 q l = q l H ( Λ + σ 2 I ) − 1 ( σ 2 Λ + Λ 2 − Λ q l q l H Λ ) ( Λ + σ 2 I ) − 1 q l = q l H ( Λ + σ 2 I ) − 1 ( σ 2 I + Λ ) Λ ( Λ + σ 2 I ) − 1 q l − q l H ( Λ + σ 2 I ) − 1 Λ q l q l H Λ ( Λ + σ 2 I ) − 1 q l = q l H ( Λ + σ 2 I ) − 1 Λ q l − q l H ( Λ + σ 2 I ) − 1 Λ q l q l H Λ ( Λ + σ 2 I ) − 1 q l \begin{aligned} p_{inter}+p_{noise} &= \mathbf{\sigma^2q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}}+\mathbf{q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda(I-q_{\mathit l}q_{\mathit l}^H)\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}}\\ &=\mathbf{q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}(\sigma^2\Lambda+\Lambda^2-\Lambda q_{\mathit l}q_{\mathit l}^H\Lambda)(\Lambda+\sigma^2I)^{-1}q_{\mathit l }}\\ &=q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}(\sigma^2I+\Lambda)\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l }-q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda q_{\mathit l}q_{\mathit l}^H\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}\\ &=q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda q_{\mathit l}-q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda q_{\mathit l}q_{\mathit l}^H\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l} \end{aligned} pinter+pnoise=σ2qlH(Λ+σ2I)−1Λ(Λ+σ2I)−1ql+qlH(Λ+σ2I)−1Λ(I−qlqlH)Λ(Λ+σ2I)−1ql=qlH(Λ+σ2I)−1(σ2Λ+Λ2−ΛqlqlHΛ)(Λ+σ2I)−1ql=qlH(Λ+σ2I)−1(σ2I+Λ)Λ(Λ+σ2I)−1ql−qlH(Λ+σ2I)−1ΛqlqlHΛ(Λ+σ2I)−1ql=qlH(Λ+σ2I)−1Λql−qlH(Λ+σ2I)−1ΛqlqlHΛ(Λ+σ2I)−1ql
MMSE SINR
S I N R M M S E = p s i g n a l p i n t e r + p n o i s e = q l H ( Λ + σ 2 I ) − 1 Λ q l q l H Λ ( Λ + σ 2 I ) − 1 q l q l H ( Λ + σ 2 I ) − 1 Λ q l − q l H ( Λ + σ 2 I ) − 1 Λ q l q l H Λ ( Λ + σ 2 I ) − 1 q l \begin{aligned} SINR_{MMSE}&=\frac{p_{signal}}{p_{inter}+p_{noise}}\\ &=\frac{ \mathbf{q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda q_{\mathit l}q_{l}^H\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}}}{ \mathbf{q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda q_{\mathit l}-q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda q_{\mathit l}q_{\mathit l}^H\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l} }} \end{aligned} SINRMMSE=pinter+pnoisepsignal=qlH(Λ+σ2I)−1Λql−qlH(Λ+σ2I)−1ΛqlqlHΛ(Λ+σ2I)−1qlqlH(Λ+σ2I)−1ΛqlqlHΛ(Λ+σ2I)−1ql
又 q l H ( Λ + σ 2 I ) − 1 Λ q l \mathbf{q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}\Lambda q_{\mathit l}} qlH(Λ+σ2I)−1Λql为标量上下同除:
S I N R M M S E = p s i g n a l p i n t e r + p n o i s e = q l H Λ ( Λ + σ 2 I ) − 1 q l 1 − q l H Λ ( Λ + σ 2 I ) − 1 q l = 1 1 − q l H Λ ( Λ + σ 2 I ) − 1 q l − 1 \begin{aligned} SINR_{MMSE}&=\frac{p_{signal}}{p_{inter}+p_{noise}}\\ &=\mathbf{\frac{q_{l}^H\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}}{1-q_{l}^H\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}}}\\ &=\mathbf{\frac{1}{1-q_{l}^H\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}}-1} \end{aligned} SINRMMSE=pinter+pnoisepsignal=1−qlHΛ(Λ+σ2I)−1qlqlHΛ(Λ+σ2I)−1ql=1−qlHΛ(Λ+σ2I)−1ql1−1
根据woodbury求逆公式(这个很多推到都用到过)
( A + U B V ) − 1 = A − 1 − A − 1 U ( I + B V A − 1 U ) − 1 B V A − 1 \mathbf{(A+UBV)^{-1}=A^{-1}-A^{-1}U(I+BVA^{-1}U)^{-1}BVA^{-1}} (A+UBV)−1=A−1−A−1U(I+BVA−1U)−1BVA−1
令 ( Λ + σ 2 I ) − 1 中 A = Λ , U = σ 2 I , B = I , V = I 则: \mathbf{(\Lambda+\sigma^2I)^{-1}}中\mathbf{A=\Lambda,U=\sigma^2I,B=I,V=I}则: (Λ+σ2I)−1中A=Λ,U=σ2I,B=I,V=I则:
( Λ + σ 2 I ) − 1 = Λ − 1 − Λ − 1 σ 2 I ( I + I ∗ I Λ − 1 σ 2 I ) − 1 I ∗ I Λ − 1 = Λ − 1 − σ 2 Λ − 1 ( I + Λ − 1 σ 2 ) − 1 Λ − 1 q l H Λ ( Λ + σ 2 I ) − 1 q l = q l H Λ ( Λ − 1 − σ 2 Λ − 1 ( I + Λ − 1 σ 2 ) − 1 Λ − 1 ) q l = q l H ( 1 − σ 2 ( I + σ 2 Λ − 1 ) − 1 Λ − 1 q l = q l H ( 1 − σ 2 ( Λ + σ 2 I ) ) q l = 1 − q l H σ 2 ( Λ + σ 2 I ) − 1 q l = 1 − σ 2 q l H ( Λ + σ 2 I ) − 1 q l = 1 − σ 2 [ Q H ( Λ + σ 2 I ) − 1 Q ] l l = 1 − σ 2 [ ( Q H Λ Q + σ 2 I ) ] l l = 1 − σ 2 [ ( H H H + σ 2 I ) − 1 ] l l \begin{aligned} \mathbf{(\Lambda+\sigma^2I)^{-1}}&=\mathbf{{\Lambda^{-1}-\Lambda^{-1}\sigma^2I(I+I*I\Lambda^{-1}\sigma^2I)^{-1}I*I\Lambda^{-1}}}\\ &=\mathbf{{\Lambda^{-1}-\sigma^2\Lambda^{-1}(I+\Lambda^{-1}\sigma^2)^{-1}\Lambda^{-1}}}\\ q_{\mathit l}^H\Lambda(\Lambda+\sigma^2I)^{-1}q_{\mathit l}&=q_{\mathit l}^H\Lambda(\mathbf{{\Lambda^{-1}-\sigma^2\Lambda^{-1}(I+\Lambda^{-1}\sigma^2)^{-1}\Lambda^{-1}}})q_{l}\\ &=q_{\mathit l}^H(1-\sigma^2(I+\sigma^2\Lambda^{-1})^{-1}\Lambda^{-1}q_{l}\\ &=\mathbf{q_{\mathit l}^H(1-\sigma^2(\Lambda+\sigma^2I))q_{l}}\\ &=\mathbf{1-q_{\mathit l}^H\sigma^2(\Lambda+\sigma^2I)^{-1}q_{l}}\\ &=\mathbf{1-\sigma^2q_{\mathit l}^H(\Lambda+\sigma^2I)^{-1}q_{l}}\\ &=\mathbf{1-\sigma^2[Q^H(\Lambda+\sigma^2I)^{-1}Q]_{ll}}\\ &=\mathbf{1-\sigma^2[(Q^H\Lambda Q+\sigma^2I)]_{ll}}\\ &=\mathbf{1-\sigma^2[(H^HH+\sigma^2I)^{-1}]_{ll}}\\ \end{aligned} (Λ+σ2I)−1qlHΛ(Λ+σ2I)−1ql=Λ−1−Λ−1σ2I(I+I∗IΛ−1σ2I)−1I∗IΛ−1=Λ−1−σ2Λ−1(I+Λ−1σ2)−1Λ−1=qlHΛ(Λ−1−σ2Λ−1(I+Λ−1σ2)−1Λ−1)ql=qlH(1−σ2(I+σ2Λ−1)−1Λ−1ql=qlH(1−σ2(Λ+σ2I))ql=1−qlHσ2(Λ+σ2I)−1ql=1−σ2qlH(Λ+σ2I)−1ql=1−σ2[QH(Λ+σ2I)−1Q]ll=1−σ2[(QHΛQ+σ2I)]ll=1−σ2[(HHH+σ2I)−1]ll
所以:
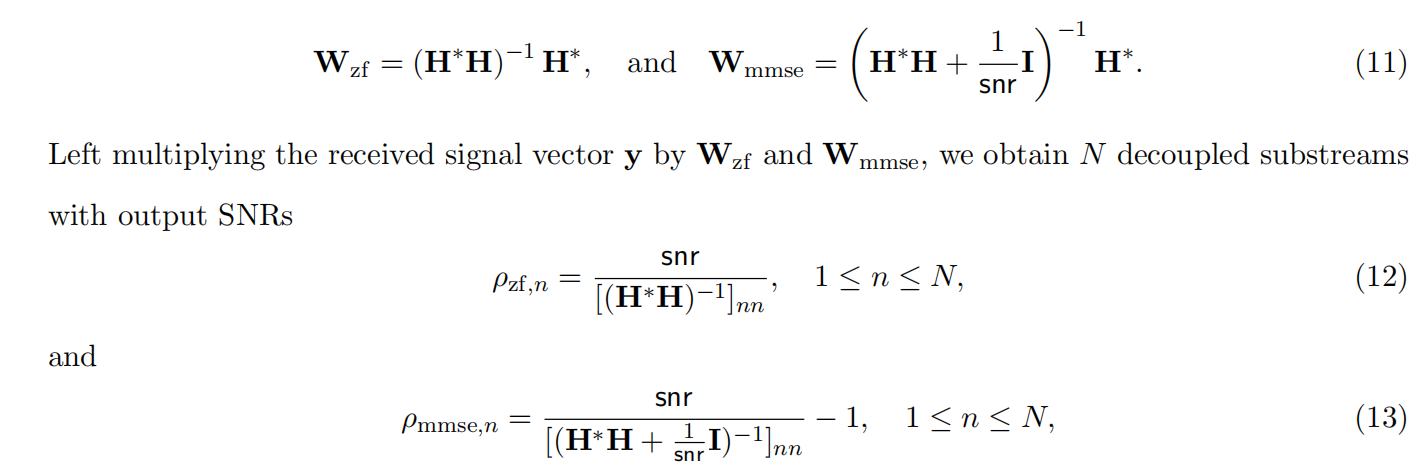
S I N R M M S E = p s i g n a l p i n t e r + p n o i s e = 1 1 − 1 + σ 2 [ ( H H H + σ 2 I ) − 1 ] l l − 1 = 1 σ 2 [ ( H H H + σ 2 I ) − 1 ] l l − 1 = s n r [ ( H H H + 1 s n r I ) − 1 ] l l − 1 \begin{aligned} SINR_{MMSE}&=\frac{p_{signal}}{p_{inter}+p_{noise}}\\ &=\mathbf{\frac{1}{1-1+\sigma^2[(H^HH+\sigma^2I)^{-1}]_{ll}\\}-1}\\ &=\mathbf{\frac{1}{\sigma^2[(H^HH+\sigma^2I)^{-1}]_{ll}\\}}-1\\ &=\mathbf{\frac{snr}{[(H^HH+\frac{1}{snr}I)^{-1}]_{ll}\\}}-1\\ \end{aligned} SINRMMSE=pinter+pnoisepsignal=1−1+σ2[(HHH+σ2I)−1]ll1−1=σ2[(HHH+σ2I)−1]ll1−1=[(HHH+snr1I)−1]llsnr−1
1,MIMO 均衡后的SINR/SNR
2,MIMO 检测算法
3, Performance Analysis of ZF and MMSE Equalizers for MIMO Systems: An In-Depth Study of the High SNR Regime
4,矩阵分析与应用-张贤达
5,MIMO系统中的高性能接收算法研究
相关文章:
均衡后的SNRSINR
本文主要摘自参考文献中的前两篇,相关文献中经常会出现MIMO检测后的SINR不过一直没有找到相关数学推到过程,其中文献[1]中给出了相关原理在此仅做记录。 1. 系统模型 复信道模型 n t n_t nt 根发送天线, n r n_r nr 根接收天线的 MIMO 系…...

Linux --进程控制
本文从以下五个方面来初步认识进程控制: 目录 进程创建 进程终止 进程等待 进程替换 模拟实现一个微型shell 进程创建 在Linux系统中我们可以在一个进程使用系统调用fork()来创建子进程,创建出来的进程就是子进程,原来的进程为父进程。…...
python执行测试用例,allure报乱码且未成功生成报告
allure执行测试用例时显示乱码:‘allure’ �����ڲ����ⲿ���Ҳ���ǿ�&am…...
使用 SymPy 进行向量和矩阵的高级操作
在科学计算和工程领域,向量和矩阵操作是解决问题的核心技能之一。Python 的 SymPy 库提供了强大的符号计算功能,能够高效地处理向量和矩阵的各种操作。本文将深入探讨如何使用 SymPy 进行向量和矩阵的创建、合并以及维度拓展等操作,并通过具体…...
html-<abbr> 缩写或首字母缩略词
定义与作用 <abbr> 标签用于表示缩写或首字母缩略词,它可以帮助用户更好地理解缩写的含义,尤其是对于那些不熟悉该缩写的用户。 title 属性的内容提供了缩写的详细说明。当用户将鼠标悬停在缩写上时,会显示一个提示框。 示例&#x…...

鸿蒙DevEco Studio HarmonyOS 5跑酷小游戏实现指南
1. 项目概述 本跑酷小游戏基于鸿蒙HarmonyOS 5开发,使用DevEco Studio作为开发工具,采用Java语言实现,包含角色控制、障碍物生成和分数计算系统。 2. 项目结构 /src/main/java/com/example/runner/├── MainAbilitySlice.java // 主界…...
中的KV缓存压缩与动态稀疏注意力机制设计)
大语言模型(LLM)中的KV缓存压缩与动态稀疏注意力机制设计
随着大语言模型(LLM)参数规模的增长,推理阶段的内存占用和计算复杂度成为核心挑战。传统注意力机制的计算复杂度随序列长度呈二次方增长,而KV缓存的内存消耗可能高达数十GB(例如Llama2-7B处理100K token时需50GB内存&a…...

代理篇12|深入理解 Vite中的Proxy接口代理配置
在前端开发中,常常会遇到 跨域请求接口 的情况。为了解决这个问题,Vite 和 Webpack 都提供了 proxy 代理功能,用于将本地开发请求转发到后端服务器。 什么是代理(proxy)? 代理是在开发过程中,前端项目通过开发服务器,将指定的请求“转发”到真实的后端服务器,从而绕…...
零基础在实践中学习网络安全-皮卡丘靶场(第九期-Unsafe Fileupload模块)(yakit方式)
本期内容并不是很难,相信大家会学的很愉快,当然对于有后端基础的朋友来说,本期内容更加容易了解,当然没有基础的也别担心,本期内容会详细解释有关内容 本期用到的软件:yakit(因为经过之前好多期…...

Spring Cloud Gateway 中自定义验证码接口返回 404 的排查与解决
Spring Cloud Gateway 中自定义验证码接口返回 404 的排查与解决 问题背景 在一个基于 Spring Cloud Gateway WebFlux 构建的微服务项目中,新增了一个本地验证码接口 /code,使用函数式路由(RouterFunction)和 Hutool 的 Circle…...

Web 架构之 CDN 加速原理与落地实践
文章目录 一、思维导图二、正文内容(一)CDN 基础概念1. 定义2. 组成部分 (二)CDN 加速原理1. 请求路由2. 内容缓存3. 内容更新 (三)CDN 落地实践1. 选择 CDN 服务商2. 配置 CDN3. 集成到 Web 架构 …...

ip子接口配置及删除
配置永久生效的子接口,2个IP 都可以登录你这一台服务器。重启不失效。 永久的 [应用] vi /etc/sysconfig/network-scripts/ifcfg-eth0修改文件内内容 TYPE"Ethernet" BOOTPROTO"none" NAME"eth0" DEVICE"eth0" ONBOOT&q…...

OPENCV形态学基础之二腐蚀
一.腐蚀的原理 (图1) 数学表达式:dst(x,y) erode(src(x,y)) min(x,y)src(xx,yy) 腐蚀也是图像形态学的基本功能之一,腐蚀跟膨胀属于反向操作,膨胀是把图像图像变大,而腐蚀就是把图像变小。腐蚀后的图像变小变暗淡。 腐蚀…...

2023赣州旅游投资集团
单选题 1.“不登高山,不知天之高也;不临深溪,不知地之厚也。”这句话说明_____。 A、人的意识具有创造性 B、人的认识是独立于实践之外的 C、实践在认识过程中具有决定作用 D、人的一切知识都是从直接经验中获得的 参考答案: C 本题解…...
)
Typeerror: cannot read properties of undefined (reading ‘XXX‘)
最近需要在离线机器上运行软件,所以得把软件用docker打包起来,大部分功能都没问题,出了一个奇怪的事情。同样的代码,在本机上用vscode可以运行起来,但是打包之后在docker里出现了问题。使用的是dialog组件,…...
C# 求圆面积的程序(Program to find area of a circle)
给定半径r,求圆的面积。圆的面积应精确到小数点后5位。 例子: 输入:r 5 输出:78.53982 解释:由于面积 PI * r * r 3.14159265358979323846 * 5 * 5 78.53982,因为我们只保留小数点后 5 位数字。 输…...

laravel8+vue3.0+element-plus搭建方法
创建 laravel8 项目 composer create-project --prefer-dist laravel/laravel laravel8 8.* 安装 laravel/ui composer require laravel/ui 修改 package.json 文件 "devDependencies": {"vue/compiler-sfc": "^3.0.7","axios": …...

力扣-35.搜索插入位置
题目描述 给定一个排序数组和一个目标值,在数组中找到目标值,并返回其索引。如果目标值不存在于数组中,返回它将会被按顺序插入的位置。 请必须使用时间复杂度为 O(log n) 的算法。 class Solution {public int searchInsert(int[] nums, …...

学校时钟系统,标准考场时钟系统,AI亮相2025高考,赛思时钟系统为教育公平筑起“精准防线”
2025年#高考 将在近日拉开帷幕,#AI 监考一度冲上热搜。当AI深度融入高考,#时间同步 不再是辅助功能,而是决定AI监考系统成败的“生命线”。 AI亮相2025高考,40种异常行为0.5秒精准识别 2025年高考即将拉开帷幕,江西、…...
如何在网页里填写 PDF 表格?
有时候,你可能希望用户能在你的网站上填写 PDF 表单。然而,这件事并不简单,因为 PDF 并不是一种原生的网页格式。虽然浏览器可以显示 PDF 文件,但原生并不支持编辑或填写它们。更糟的是,如果你想收集表单数据ÿ…...

docker 部署发现spring.profiles.active 问题
报错: org.springframework.boot.context.config.InvalidConfigDataPropertyException: Property spring.profiles.active imported from location class path resource [application-test.yml] is invalid in a profile specific resource [origin: class path re…...

初学 pytest 记录
安装 pip install pytest用例可以是函数也可以是类中的方法 def test_func():print()class TestAdd: # def __init__(self): 在 pytest 中不可以使用__init__方法 # self.cc 12345 pytest.mark.api def test_str(self):res add(1, 2)assert res 12def test_int(self):r…...
【数据分析】R版IntelliGenes用于生物标志物发现的可解释机器学习
禁止商业或二改转载,仅供自学使用,侵权必究,如需截取部分内容请后台联系作者! 文章目录 介绍流程步骤1. 输入数据2. 特征选择3. 模型训练4. I-Genes 评分计算5. 输出结果 IntelliGenesR 安装包1. 特征选择2. 模型训练和评估3. I-Genes 评分计…...

在web-view 加载的本地及远程HTML中调用uniapp的API及网页和vue页面是如何通讯的?
uni-app 中 Web-view 与 Vue 页面的通讯机制详解 一、Web-view 简介 Web-view 是 uni-app 提供的一个重要组件,用于在原生应用中加载 HTML 页面: 支持加载本地 HTML 文件支持加载远程 HTML 页面实现 Web 与原生的双向通讯可用于嵌入第三方网页或 H5 应…...
Mobile ALOHA全身模仿学习
一、题目 Mobile ALOHA:通过低成本全身远程操作学习双手移动操作 传统模仿学习(Imitation Learning)缺点:聚焦与桌面操作,缺乏通用任务所需的移动性和灵活性 本论文优点:(1)在ALOHA…...
Springboot社区养老保险系统小程序
一、前言 随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,社区养老保险系统小程序被用户普遍使用,为方…...

关键领域软件测试的突围之路:如何破解安全与效率的平衡难题
在数字化浪潮席卷全球的今天,软件系统已成为国家关键领域的核心战斗力。不同于普通商业软件,这些承载着国家安全使命的软件系统面临着前所未有的质量挑战——如何在确保绝对安全的前提下,实现高效测试与快速迭代?这一命题正考验着…...
ABAP设计模式之---“简单设计原则(Simple Design)”
“Simple Design”(简单设计)是软件开发中的一个重要理念,倡导以最简单的方式实现软件功能,以确保代码清晰易懂、易维护,并在项目需求变化时能够快速适应。 其核心目标是避免复杂和过度设计,遵循“让事情保…...
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据 Power Query 具有大量专门帮助您清理和准备数据以供分析的功能。 您将了解如何简化复杂模型、更改数据类型、重命名对象和透视数据。 您还将了解如何分析列,以便知晓哪些列包含有价值的数据,…...

Java线上CPU飙高问题排查全指南
一、引言 在Java应用的线上运行环境中,CPU飙高是一个常见且棘手的性能问题。当系统出现CPU飙高时,通常会导致应用响应缓慢,甚至服务不可用,严重影响用户体验和业务运行。因此,掌握一套科学有效的CPU飙高问题排查方法&…...