ros的pcl库中对于自己定义的消息,调用pcl库时总是报错 c++
首先定义自己的消息类型
struct CustomPoint { // 定义点类型结构PCL_ADD_POINT4D; // 该点类型有4个元素float intensity = 0.0;uint32_t zone;uint32_t ring;uint32_t sector;EIGEN_MAKE_ALIGNED_OPERATOR_NEW // 确保new操作符对齐操作
} EIGEN_ALIGN16; // 强制SSE对齐POINT_CLOUD_REGISTER_POINT_STRUCT( // 注册点类型宏CustomPoint,(float, x, x)(float, y, y)(float, z, z)(float, intensity, intensity)(uint32_t, zone, zone)(uint32_t, ring, ring)(uint32_t, sector, sector)
)// typedef pcl::PointXYZI VPoint;
typedef CustomPoint VPoint;
typedef pcl::PointCloud<VPoint> VPointType;
在定义完自己的消息类型之后,调用pcl::removeNaNFromPointCloud等自带的函数时会报错:
(.text+0x14631): undefined reference to `pcl::PCLBase<CustomPoint>::PCLBase(
cl::removeNaNFromPointCloud<CustomPoint>(pcl::PointCloud<CustomPoint> const&, pcl::PointCloud<CustomPoint>&, std::vector<int, std::allocator<int> >&)'
collect2: error: ld returned 1 exit status
代码如下:
void PatchWorkpp::pointcloud_callback(const sensor_msgs::PointCloud2::ConstPtr &input){VPointType::Ptr cloud_in = boost::make_shared<VPointType>();VPointType::Ptr src_cloud(new VPointType);pcl::fromROSMsg(*input, *cloud_in);std::vector<int> mapping;pcl::removeNaNFromPointCloud(*cloud_in, *cloud_in, mapping); // 必须要移除NAN点}
此时需要添加头文件如下:
#include <pcl/impl/pcl_base.hpp>
#include <pcl/filters/impl/crop_box.hpp>
#include <pcl/filters/impl/filter.hpp>
#include <pcl/kdtree/impl/kdtree_flann.hpp>
#include <pcl/search/impl/organized.hpp>
#include <pcl/surface/impl/convex_hull.hpp>
参考文章:
https://blog.csdn.net/qq_43427457/article/details/125052803
相关文章:

ros的pcl库中对于自己定义的消息,调用pcl库时总是报错 c++
首先定义自己的消息类型 struct CustomPoint { // 定义点类型结构PCL_ADD_POINT4D; // 该点类型有4个元素float intensity 0.0;uint32_t zone;uint32_t ring;uint32_t sector;EIGEN_MAKE_ALIGNED_OPERATOR_NEW // 确保new操作符对齐操作 } EIGEN_ALIGN16; // 强制SSE对齐POIN…...

DataFrame—数据汇总6
文章最前: 我是Octopus,这个名字来源于我的中文名--章鱼;我热爱编程、热爱算法、热爱开源。所有源码在我的个人github ;这博客是记录我学习的点点滴滴,如果您对 Python、Java、AI、算法有兴趣,可以关注我的…...

Java入门基础学习笔记41——实体类
实体JavaBean/实体类: 就是一种特殊形式的类。 1)这个类中的成员变量都要私有,并且要对外提供相应的getXXX,setXXX的方法。 2)类中必须要有一个公共的无参的构造器。其他的构造器可写可不写。 右键菜单中࿰…...

【Linux】信号之信号的保存和处理详解
🤖个人主页:晚风相伴-CSDN博客 💖如果觉得内容对你有帮助的话,还请给博主一键三连(点赞💜、收藏🧡、关注💚)吧 🙏如果内容有误或者有写的不好的地方的话&…...
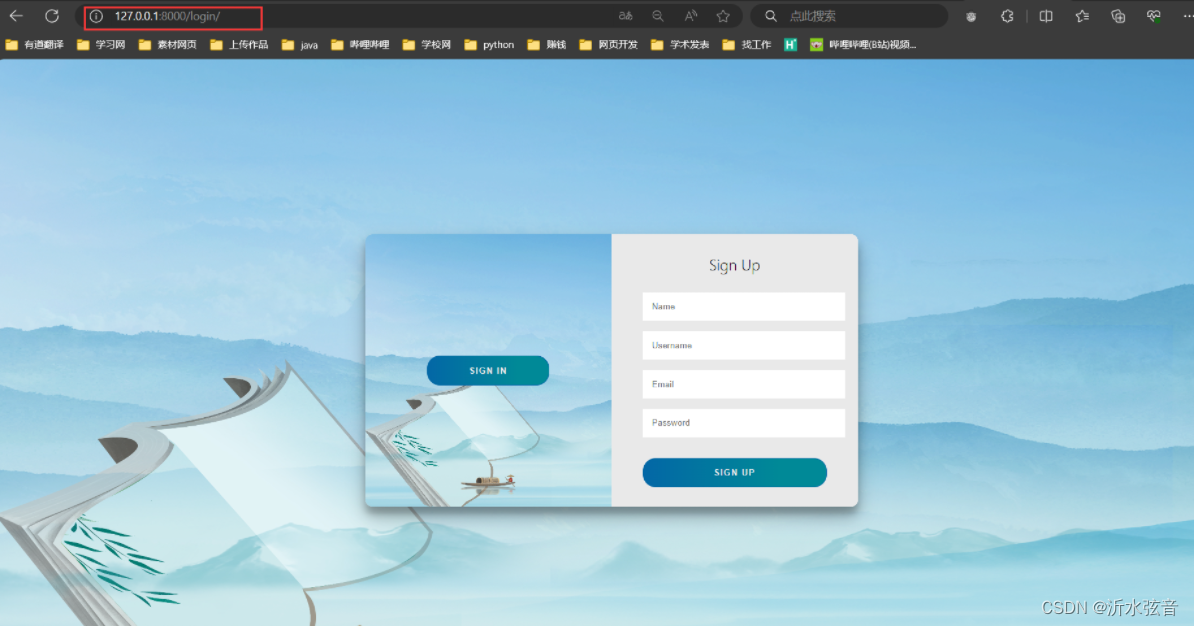
基于Django的图书管理系统
文章目录 前言一、页面展示1.登录2.前端页面3.后端页面 二、项目上传(1)导入数据库(2)导入项目(3)数据库密码修改(4)进入网站 总结 前言 本网站调用Django编写了图书管理网站&#…...

js实现元素根据鼠标滚轮滚动向左右上下滑动着从模糊到清楚显示出来
html代码 <div ref{test} id"animatedElement" className"not-animated"> <div style{{width:"100px",height:"50px",backgroundColor:"red"}}> </div> </div> JS代码 const te…...

yocto学习
bitbake命令单独编译u-boot: $ bitbake -c compile -f u-boot-imx $ bitbake -c deploy -f u-boot-imx //部署编译生成的u-boot镜像到deploy bitbake命令单独编译kernel: bitbake -c compile -f linux-imx //编译内核 bitbake -c deploy -f linux-imx /…...
【IC设计】牛客网-序列检测习题总结
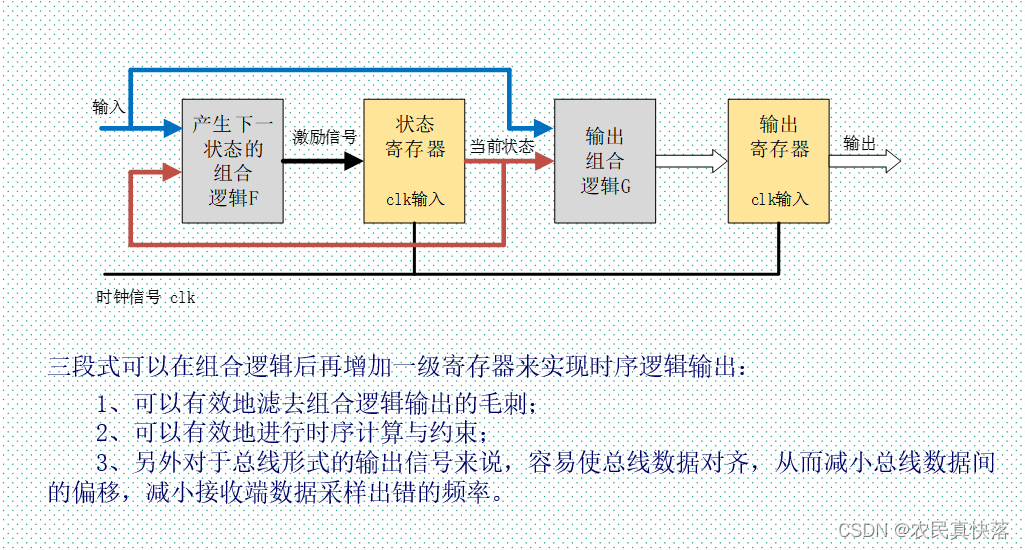
文章目录 状态机基础知识VL25 输入序列连续的序列检测VL26 含有无关项的序列检测VL27 不重叠序列检测VL28 输入序列不连续的序列检测参考资料 状态机基础知识 VL25 输入序列连续的序列检测 timescale 1ns/1ns module sequence_detect(input clk,input rst_n,input a,output re…...
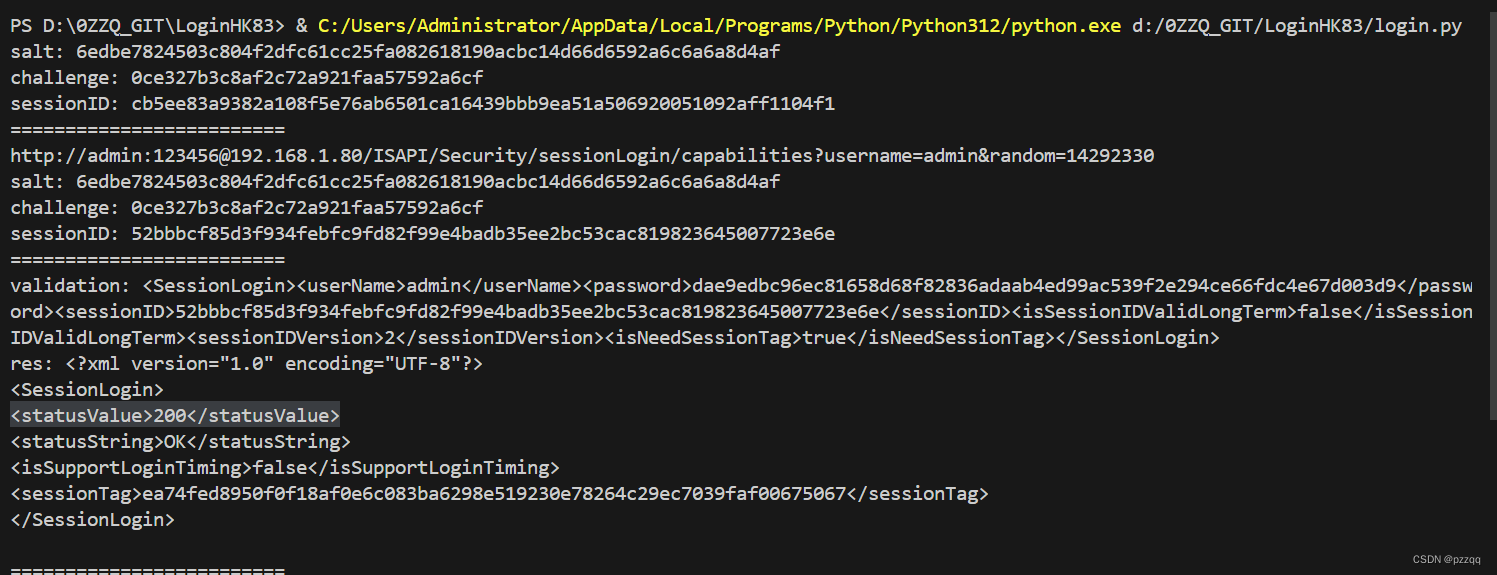
python爬虫登录到海康相机管理页面
简述 1.最近接到个任务是在管理页面更改相机的某个参数,下载官方的sdk貌似没有提供这个接口,所以只能自己写爬虫登录发请求了。 1.主要步骤 1.1 发送get请求获取到salt,sessionID,challenge等信息 http://admin:123456192.168.…...

9.Docker网络
文章目录 1、Docker网络简介2、常用基本命令3、网络模式对比举例3.1、bridge模式3.2、host模式3.3、none模式3.4、container模式3.5、自定义网络 1、Docker网络简介 作用: 容器间的互联和通信以及端口映射容器IP变动时候可以通过服务名直接进行网络通信而不受到影…...
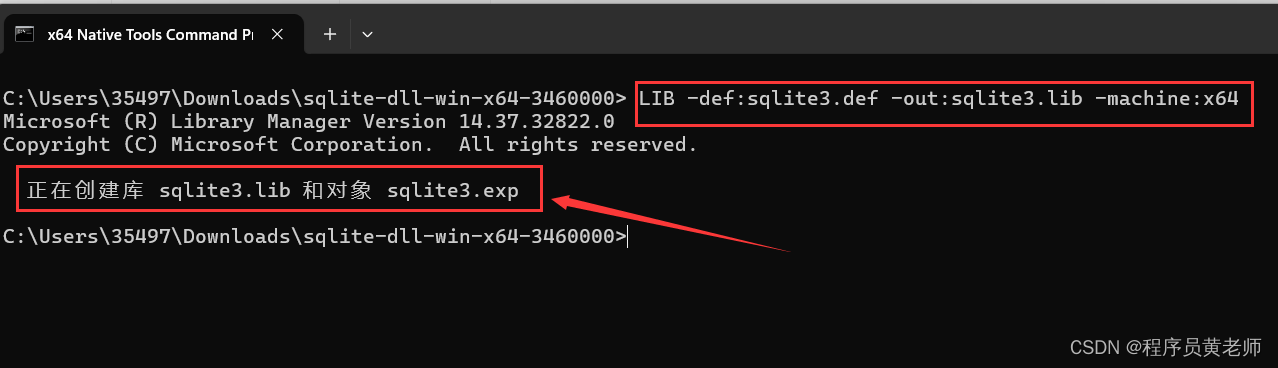
Windows VS2022 C语言使用 sqlite3.dll 访问 SQLite数据库
今天接到一个学生C语言访问SQLite数据库的的需求: 第一步,SQLite Download Page下载 sqlite3.dll 库 下载解压,发现只有两个文件: 于是使用x64 Native Tools Command Prompt 终端 生成 sqlite3.lib 和 sqlite3.exp文件 LIB -def:sqlite3.def -out:sqlite3.lib -machin…...

java库和包的概念
在Java中,"库"和"包"是两个不同的概念,但它们之间存在着密切的关联。 库(Library) 定义:库是一组已经编写好的代码和资源,用于解决特定的问题或提供特定的功能。它可以包含一个或多个…...

mysql内存结构
一:逻辑存储结构:表空间->段->区->页->行、 表空间:一个mysql实例对应多个表空间,用于存储记录,索引等数据。 段:分为数据段,索引段,回滚段。innoDB是索引组织表&…...
Python | Leetcode Python题解之第111题二叉树的最小深度
题目: 题解: class Solution:def minDepth(self, root: TreeNode) -> int:if not root:return 0que collections.deque([(root, 1)])while que:node, depth que.popleft()if not node.left and not node.right:return depthif node.left:que.appen…...

c++二进制输出
输入一个数,输出n个数,数可以是0或1;输入:4输出:0010;提示:本题要用到rand(),srand(time(0));代码如下:#include<bits/stdc.h> #include<windows.h> using namespace s…...
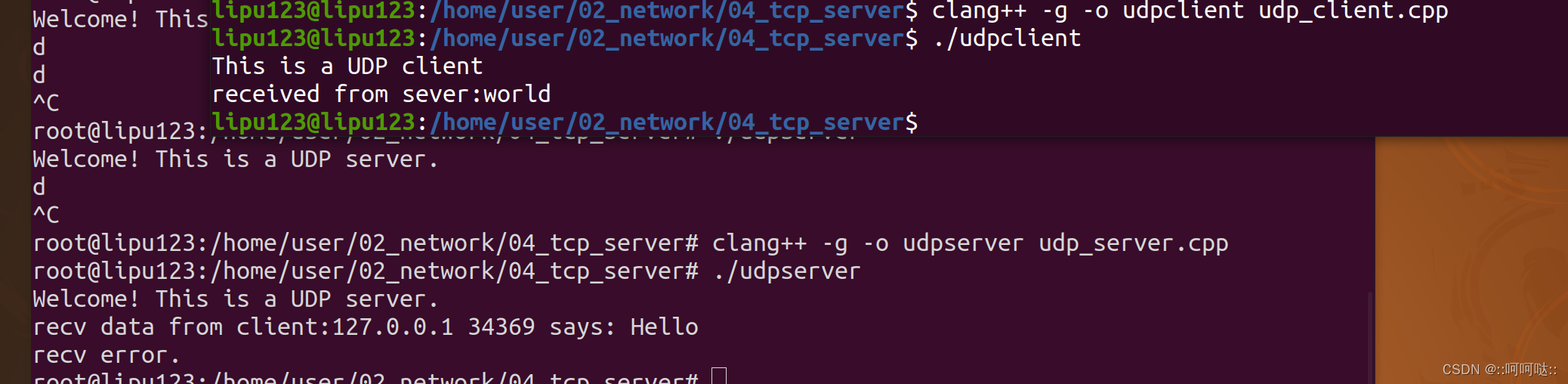
5. C++网络编程-UDP协议的实现
UDP是无连接的。 UDP Server网络编程基本步骤 创建socket,指定使用UDP协议将socket与地址和端口绑定使用recv/send接收/发送数据 由于UDP是无连接的,直接侦听就行使用close关闭连接 这个UDP接收数据的时候用的API是recvfrom,发送数据是sendto 客户端 …...
Altium Designer 中键拖动,滚轮缩放,并修改缩放速度
我的版本是AD19,其他版本应该都一样。 滚轮缩放 首先,要用滚轮缩放,先要调整一下AD 设置,打开Preferences,在Mouse Wheel Configuration 里,把Zoom Main Window 后面Ctrl 上的对勾取消掉,再把…...

python从入门到精通04
一、编写英文月份词典 month_num int(input("请输入您想要查询的月份:")) month_list [January,February,March,April,May,June,July,August,September,October,November,December] print("您查询的月份单词是:", month_list[mon…...
tomcat三级指导
版本 ./catalina.sh linux version.bat win 1.确认是否使用了tomcat管理后台 我们先找到配置文件:tomcat主目录下/conf/server.xml 可以查看到连接端口,默认为8080 然后查看manager-gui管理页面配置文件,是否设置了用户登录 配置文件…...

不知道是该怎么引用多个函数片段?具体示例如代码
🏆本文收录于「Bug调优」专栏,主要记录项目实战过程中的Bug之前因后果及提供真实有效的解决方案,希望能够助你一臂之力,帮你早日登顶实现财富自由🚀;同时,欢迎大家关注&&收藏&&…...

Claude Code 之父:2026 年我一行代码都没写,编程已被 AI 解决
2026 年,你还在一行一行敲代码吗?Claude Code 的创造者、Anthropic 核心人物 Boris Cherny,在公开访谈里抛出一句让整个行业震动的话:2026 年到现在,我没有写过一行代码。所有开发工作,100% 交给 AI 代理完…...
)
用Python+OpenCV手把手实现Prewitt边缘检测(附完整代码与效果对比图)
用PythonOpenCV手把手实现Prewitt边缘检测(附完整代码与效果对比图) 边缘检测是计算机视觉中最基础也最关键的预处理步骤之一。想象一下,当你需要让计算机"看清"一张照片中的物体轮廓时,边缘检测算法就是它的"视觉…...

Blender渲染通道完全指南:如何像电影后期一样,分离出深度、阴影与反射图
Blender渲染通道完全指南:影视级后期制作的深度解析在数字内容创作领域,Blender已经从一个简单的3D建模工具成长为能够处理复杂视觉特效的全流程解决方案。对于追求影视级质量的中高级用户而言,掌握渲染通道技术是提升作品专业度的关键一步。…...
)
ROS Noetic实战:从bag包里‘抠’出雷达点云和IMU数据的保姆级教程(Ubuntu 20.04)
ROS Noetic实战:从bag包里提取雷达点云和IMU数据的完整指南(Ubuntu 20.04)在机器人开发中,ROS bag文件就像是一个装满珍贵数据的宝箱,而雷达点云和IMU数据则是其中最闪亮的宝石。作为一名长期与ROS打交道的开发者&…...

Godot4 2D游戏开发避坑指南:TileMap绘制、节点顺序与相机设置的三个常见问题
Godot4 2D游戏开发避坑指南:TileMap绘制、节点顺序与相机设置的三个常见问题当你第一次用Godot4完成一个2D场景搭建时,那种成就感往往会被几个突如其来的bug瞬间击碎——角色神秘消失、背景纹丝不动、屏幕边缘出现诡异黑边。这些问题看似简单,…...

基于Arduino与nRF24L01+的无线传感器平台设计与部署指南
1. 项目概述与设计思路如果你和我一样,喜欢在阳台或者小院子里种点蔬菜瓜果,那你肯定也遇到过这样的烦恼:出门几天,心里总惦记着家里的番茄苗是不是缺水了,小温室里的温度会不会太高。传统的温湿度计只能让你在现场读数…...

3个步骤彻底解决WSA安装失败问题:从错误代码到完美运行
3个步骤彻底解决WSA安装失败问题:从错误代码到完美运行 【免费下载链接】WSABuilds Run Windows Subsystem For Android on your Windows 10 and Windows 11 PC using prebuilt binaries with Google Play Store (MindTheGapps) and/or Magisk or KernelSU (root so…...
)
告别复杂模型:用Python+OpenCV+dlib实现简易驾驶员疲劳监测(附完整代码)
轻量级驾驶员疲劳监测系统:PythonOpenCVdlib实战指南 在长途驾驶或夜间行车时,疲劳是导致交通事故的重要因素之一。传统基于嵌入式设备的疲劳监测系统往往需要专用硬件,增加了开发成本和部署难度。本文将介绍如何利用Python生态中的OpenCV和d…...

如何让旧款Mac运行最新系统:OpenCore Legacy Patcher完整指南
如何让旧款Mac运行最新系统:OpenCore Legacy Patcher完整指南 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 想让你的老旧Mac设备重新焕发活力&a…...

鼎讯AM-601光纤熔接机:交通通信建设与维护的可靠伙伴
在铁路、高速公路等交通基础设施的智能化建设中,稳定高效的光纤网络是指挥调度、安全监控等核心系统运行的生命线。鼎讯AM-601光纤熔接机,作为一款专为严苛环境设计的六马达便携式熔接设备,正成为保障这些关键通信链路畅通无阻的可靠选择。无…...