车道线识别与预警系统LDWS(代码+教程)
车道线识别与预警系统(Lane Departure Warning System, LDWS)作为智能交通系统中的重要组成部分,旨在通过先进的图像处理和计算机视觉技术,实时监测车辆行驶过程中的车道位置,预防因驾驶员疏忽或疲劳导致的车道偏离事故。该系统综合了多种技术和算法,以实现对复杂道路环境的适应性,下面对其关键技术、工作原理、面临挑战及未来发展趋势进行综述。
关键技术与工作原理
1. 图像采集与处理
- 摄像头传感器:系统通常搭载高清摄像头,安装在车辆前部,用于捕捉前方道路的实时图像。
- 图像预处理:首先对原始图像进行去噪、灰度化、高斯模糊等操作,增强车道线的可见性,减少环境干扰。
- 颜色空间转换:将图像从RGB空间转换到更适合车道线识别的空间,如HSV空间,便于通过颜色过滤区分车道线。
2. 车道线检测
- 边缘检测:利用Canny边缘检测等算法,突出图像中的线条结构。
- 特征提取:基于颜色、纹理或形状特征识别车道线,常用方法包括霍夫变换、滑动窗口法以及基于机器学习和深度学习的算法。
- 深度学习方法:使用卷积神经网络(CNN)、U-Net、Mask R-CNN等深度学习模型直接进行车道线像素级分割,提高了识别的准确性和鲁棒性。
3. 车道线跟踪与参数计算
- 帧间关联:结合连续帧信息,通过卡尔曼滤波或粒子滤波等算法平滑车道线位置,减少误检和漏检。
- 参数计算:根据检测到的车道线计算斜率、曲率等参数,评估车辆的车道保持状态。
4. 预警机制
- 偏离判定:根据车道线参数和车辆行驶状态,判断是否发生非意图性车道偏离。
- 警报触发:一旦检测到车道偏离,系统通过声音、振动或视觉提示警告驾驶员,及时纠正行驶轨迹。
面临的挑战
- 环境适应性:恶劣天气(如雨雪、雾天)、夜间低光照、路面遮挡等条件降低了识别准确性。
- 复杂道路结构:城市道路中频繁出现的弯道、交叉口、路标线磨损或不规范等情况增加了识别难度。
- 算法实时性与计算资源:需要在有限的计算资源下实现高速、准确的处理,对算法效率提出更高要求。
- 驾驶员习惯与信任度:提高预警系统的用户接受度,减少误报,增强驾驶员对系统的信赖。
未来发展趋势
- 深度学习优化与融合:持续优化深度学习模型,降低模型复杂度,提高识别精度,同时融合多模态数据(如雷达、LiDAR)以增强环境感知能力。
- 自适应与个性化:根据驾驶环境和驾驶员行为动态调整预警策略,实现更个性化的驾驶辅助。
- 集成与协同:与其他ADAS系统(如自适应巡航控制、盲点监测)集成,形成更全面的智能驾驶辅助系统。
- 标准化与法规:随着技术成熟,相关国际标准和法律法规将逐步完善,推动车道线识别与预警系统在全球范围内的广泛应用。
综上所述,车道线识别与预警系统是提升道路安全的关键技术之一,其持续的技术进步和应用场景拓展,将对减少交通事故、提高驾驶舒适性发挥重要作用。未来,随着智能化、网联化技术的深度融合,该系统将成为智能交通体系中不可或缺的一环。

关键代码
理解了您希望看到更多技术细节的愿望,以下是一个更详尽的示例代码,展示如何使用Python和OpenCV库实现一个基本的车道线识别与预警系统。这个例子加入了简单的车道偏离警告功能,并尝试解决一些实际应用中可能遇到的问题,如通过透视变换校正视角,以及使用多项式拟合车道线以计算曲率。```python
import cv2
import numpy as npdef calibrate_camera(calib_images, nx, ny):"""相机标定,获取畸变系数和相机矩阵"""objpoints = [] # 三维点imgpoints = [] # 二维图像点objp = np.zeros((ny*nx,3), np.float32)objp[:,:2] = np.mgrid[0:nx, 0:ny].T.reshape(-1,2)for fname in calib_images:img = cv2.imread(fname)gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)ret, corners = cv2.findChessboardCorners(gray, (nx, ny), None)if ret == True:imgpoints.append(corners)objpoints.append(objp)ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)return mtx, distdef undistort_image(image, mtx, dist):"""根据相机标定结果,矫正图像畸变"""return cv2.undistort(image, mtx, dist, None, mtx)def perspective_transform(image, src_points, dst_points):"""透视变换,校正视角"""M = cv2.getPerspectiveTransform(src_points, dst_points)invM = cv2.getPerspectiveTransform(dst_points, src_points)warped = cv2.warpPerspective(image, M, (image.shape[1], image.shape[0]), flags=cv2.INTER_LINEAR)return warped, invMdef canny_edge_detection(image):"""Canny边缘检测"""gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)blur = cv2.GaussianBlur(gray, (5, 5), 0)canny = cv2.Canny(blur, 50, 150)return cannydef region_of_interest(image):"""定义感兴趣区域(ROI)"""height, width = image.shapepolygons = np.array([[(200, height), (550, 250), (700, 250), (1100, height)]])mask = np.zeros_like(image)cv2.fillPoly(mask, polygons, 255)masked_image = cv2.bitwise_and(image, mask)return masked_imagedef hough_lines(image):"""霍夫变换检测直线"""lines = cv2.HoughLinesP(image, rho=2, theta=np.pi/180, threshold=50, minLineLength=40, maxLineGap=5)return linesdef average_slope_intercept(lines):"""计算车道线的平均斜率和截距"""left_lines = []right_lines = []for line in lines:x1, y1, x2, y2 = line[0]slope = (y2 - y1) / (x2 - x1)if slope < 0: # 左车道线left_lines.append((slope, intercept))else: # 右车道线right_lines.append((slope, intercept))left_lines_avg = np.average(left_lines, axis=0)right_lines_avg = np.average(right_lines, axis=0)return left_lines_avg, right_lines_avgdef display_lines(image, lines,


车道线识别与预警系统是一种基于计算机视觉和图像处理技术的先进驾驶辅助系统,旨在帮助驾驶员更好地识别道路上的车道线,并及时预警提醒驾驶员注意驾驶安全。这种系统通常应用于智能驾驶汽车、自动驾驶车辆和高级驾驶辅助系统(ADAS)等领域。本文将深入探讨车道线识别与预警系统的原理及其工作流程,以期为读者提供全面的了解。
车道线识别与预警系统的原理
-
图像采集
车道线识别与预警系统首先需要进行图像采集,一般是通过摄像头来获取道路的实时图像。摄像头通常安装在汽车前部,它可以捕获车辆行驶过程中的道路情况,包括车道线、交通标志、其他车辆等信息。这些图像数据将成为后续车道线识别与预警系统的输入。 -
图像预处理
在图像采集之后,需要对图像进行预处理以提高后续的车道线识别效果。图像预处理通常包括图像去噪、灰度化、边缘检测、图像增强等步骤,以确保图像清晰度和准确性。 -
车道线检测
车道线检测是车道线识别与预警系统的核心环节,它通过图像处理算法对道路图像中的车道线进行识别和提取。其中,常用的算法包括霍夫变换、Canny边缘检测、Sobel算子等。这些算法能够有效地提取出图像中的车道线信息,并将其转换为数学模型,以便后续的分析和处理。 -
车道线跟踪
一旦检测到车道线,系统需要对车道线进行跟踪,以便实时更新车道线的位置和状态。车道线跟踪算法通常利用图像序列中的连续帧图像,通过匹配和追踪车道线的特征点来实现车道线的跟踪。 -
预警系统
基于车道线的检测和跟踪结果,车道线识别与预警系统可以实现各种预警功能,如车道偏离预警、碰撞预警、超速预警等。这些预警功能可以通过声音、光线、振动等方式向驾驶员发送预警信息,提醒驾驶员及时采取行动,确保驾驶安全。
车道线识别与预警系统的工作流程
-
图像采集
车载摄像头实时采集道路图像,并传输给车道线识别与预警系统。 -
图像预处理
车道线识别与预警系统对接收到的图像进行预处理,包括去噪、灰度化、边缘检测等处理,以提高后续车道线识别的准确性。 -
车道线检测
系统利用图像处理算法对预处理后的图像进行车道线检测,提取道路中的车道线信息。 -
车道线跟踪
系统对检测到的车道线进行跟踪,实时更新车道线的位置和状态。 -
预警系统
基于车道线的检测和跟踪结果,系统实现各种预警功能,如车道偏离预警、碰撞预警等,并向驾驶员发送相应的预警信息。
车道线识别与预警系统的优势和应用
-
提高驾驶安全性
车道线识别与预警系统可以实时监测车辆行驶状态,及时发现并预警驾驶员可能存在的危险行为,如车道偏离、碰撞风险等,从而提高驾驶安全性。 -
降低交通事故率
通过预警驾驶员潜在的交通危险,车道线识别与预警系统有助于降低交通事故的发生率,保障道路交通安全。 -
实现智能驾驶
车道线识别与预警系统是智能驾驶技术的重要组成部分,可以为自动驾驶汽车和高级驾驶辅助系统提供必要的环境感知和决策支持,推动智能驾驶技术的发展。 -
完善驾驶体验
通过及时的预警提醒,车道线识别与预警系统可以提升驾驶员的驾驶体验,减少疲劳驾驶和误操作,使驾驶更加轻松和安全。
总之,车道线识别与预警系统基于计算机视觉和图像处理技术,通过对道路图像进行识别、跟踪和预警,帮助驾驶员提高驾驶安全性,降低交通事故率,实现智能驾驶,并改善驾驶体验。随着智能驾驶技术的不断发展,车道线识别与预警系统必将在未来的智能交通领域发挥越来越重要的作用。

相关文章:
车道线识别与预警系统LDWS(代码+教程)
车道线识别与预警系统(Lane Departure Warning System, LDWS)作为智能交通系统中的重要组成部分,旨在通过先进的图像处理和计算机视觉技术,实时监测车辆行驶过程中的车道位置,预防因驾驶员疏忽或疲劳导致的车道偏离事故…...
——元组)
Python基础学习笔记(七)——元组
目录 一、一维元组的介绍、创建与修改二、组合的基本操作1. 遍历2. 取长度3. 取最值4. 打包5. 批处理5.1 map()函数5.2 lambda 表达式5.3 lambda 表达式 map()函数 一、一维元组的介绍、创建与修改 元组(tuple),一种不可变、有序、可重复的数…...
安卓开发:相机水印设置
1.更新水印 DecimalFormat DF new DecimalFormat("#"); DecimalFormat DF1 new DecimalFormat("#.#");LocationManager LM (LocationManager)getSystemService(Context.LOCATION_SERVICE); LM.requestLocationUpdates(LocationManager.GPS_PROVIDER, 2…...

Excel工作表单元格单击选中事件,VBA动态数值排序
Excel工作表单元格单击选中事件,VBA动态数值排序(WX公众号:Excel潘谆白说VBA) 文章目录 前言一、运行效果二、代码前言 面对每月的消费账单,面对月底待还的信用卡或花呗,面对不足三位数的余额,你是否怀疑过账单自己的消费。你是否因此开始记账,每个月记流水,想知道当月…...
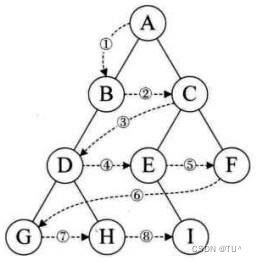
数据结构~~链式二叉树
目录 一、基本概念 链式存储概念 二、链式二叉树的结构 链式二叉树结构 构建链式二叉树 二叉树的遍历 二叉树节点和高度等 二叉树销毁 三、链式二叉树的练习 相同的树 对称二叉树 另外一颗子树 二叉树前序遍历 二叉树遍历 四、完整代码 Tree.h Tree.c 五、总结 一…...
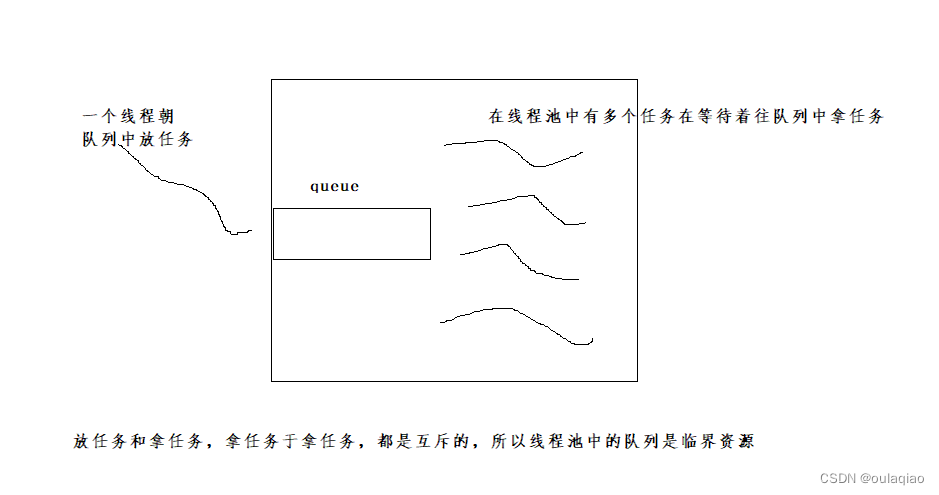
线程池,日志
所要用到的知识点: 多线程的创建 生产消费模型, 线程锁 条件变量 代码: 线程池日志...

vue的图片上传
关于vue3的图片上传,这里记录一下,有兴趣的朋友可以参考。。。。 <van-uploader:after-read"afterRead"v-model"headImg":max-count"1"class"picture"/> const fileList ref();const afterRead (fil…...

题解 P1150
题解 P1150 因为k个烟蒂1根烟1个烟蒂 所以k-1个烟蒂1根烟 注意减掉最后一根烟的烟蒂 (因这题并没有借烟蒂换烟再还回这一说) 此解法为小学4~6年级水平 #include <bits/stdc.h>using namespace std;int main(){int n,k;cin>>n>>k;cout<<n(n-1)/(k-…...

牛客NC324 下一个更大的数(三)【中等 双指针 Java/Go/PHP/C++】参考lintcode 52 · 下一个排列
题目 题目链接: https://www.nowcoder.com/practice/475da0d4e37a481bacf9a09b5a059199 思路 第一步:获取数字上每一个数,组成数组arr 第二步:利用“下一个排列” 问题解题方法来继续作答,步骤:利用lintc…...

Vue3解决“找不到模块“@/components/xxx.vue”或其相应的类型声明”
文章目录 前言背景问题描述解决方案总结 前言 在使用 Vue 3 开发项目时,遇到“找不到模块 ‘/components/xxx.vue’ 或其相应的类型声明”的错误是一个常见问题。这通常与 TypeScript 和模块解析相关的配置不当有关。本文将详细介绍如何解决此问题,确保…...

nginx的Connection refused
问题描述 nginx的错误日志中突然出现大量的的Connection refused问题,日志如下: 2020/03/19 09:52:53 [error] 20117#20117: *7403411764 connect() failed (111: Connection refused) while connecting to upstream, client: xxx.xxx.xxx.xxx, server:…...
)
Haskell 的高阶函数(Higher-order functions)
本节继续介绍Haskell的知识,本节内容介绍的是高阶函数(Higher-order functions)的概念和应用。高阶函数是指能够接受其他函数作为参数,或者返回函数作为结果的函数。 Functions as values(函数作为值)&…...

Unity websocket客户端
🏆 个人愚见,没事写写笔记 🏆《博客内容》:Unity3D开发内容 🏆🎉欢迎 👍点赞✍评论⭐收藏 🔎目标:服务器和客户端可以实时的传输信息 ☀️实现目标: 使用的w…...

每日一题——博弈论(枚举与暴力)
博弈论 题目描述 运行代码 #include<iostream> #include<vector> using namespace std; int main(){int n;cin >> n;vector<int> d(n,0);for(int i 0;i < n;i){cin >> d[i];}vector<int> in(1000,0);for(int k 1;k<3;k){for(int…...
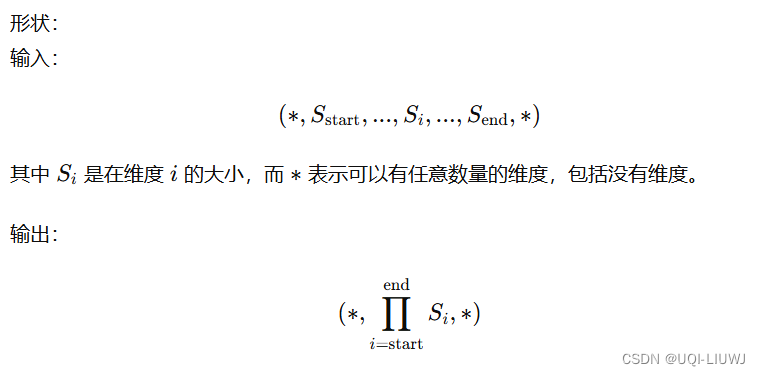
pytorch笔记:torch.nn.Flatten()
1 介绍 torch.nn.Flatten(start_dim1, end_dim-1) 将一个连续的维度范围扁平化为一个张量 start_dim (int)要开始扁平化的第一个维度(默认值 1)end_dim (int)要结束扁平化的最后一个维度(默认值 -1) 2 举例 input torch.ra…...

一个人应该怎么操作抖音小店呢?店铺操作流程给你讲解清楚!
大家好,我是电商小V 现在入驻抖音小店的有很多新手,新手最关心的就是一个人应该如何操作抖音小店,操作抖音小店需要做好哪几步呢?关于这个问题咱们就来详细的讲解一下, 第一点:开店 开店是做店的第一步&…...

“等保测评与安全运维的协同:保障企业网络安宁
"等保测评与安全运维的协同:保障企业网络安宁"是一个涉及信息安全领域的重要话题。这里,我们可以从几个方面来探讨这个主题。 1. 等保测评(等级保护测评) 等保测评,即信息安全等级保护测评,是依…...

python抽取pdf中的参考文献
想将一份 pdf 论文中的所有参考文献都提取出来,去掉不必要的换行,放入一个 text 文件,方便复制。其引用是 ieee 格式的,形如: 想要只在引用序号(如 [3])前换行,其它换行都去掉&…...

Java进阶学习笔记21——泛型概念、泛型类、泛型接口
泛型: 定义类、接口、方法的时候,同时声明了一个或者多个类型变量(如: <E>),称之为泛型类、泛型接口、泛型方法,我们统称之为泛型。 说明这是一个泛型类。 如果不使用泛型,我们可以往ArrayList中传…...

PostgreSQL CASE语句深度解析:性能、类型与NULL安全实战指南
1. 为什么你必须真正吃透 PostgreSQL 的 CASE 语句——它远不止是 SQL 里的“if-else”翻译器在 PostgreSQL 实战中,我见过太多人把CASE当成一个语法糖:写几个WHEN...THEN,加个ELSE,再套个END,就以为搞定了。结果呢&am…...

从‘文件夹’到对象列表:手把手教你用MinIO Java Client实现灵活的文件查询与过滤
从‘文件夹’到对象列表:手把手教你用MinIO Java Client实现灵活的文件查询与过滤在当今数据驱动的时代,对象存储已成为现代应用架构中不可或缺的一部分。MinIO作为高性能、兼容S3协议的开源对象存储解决方案,凭借其轻量级和易用性赢得了众多…...
)
YOLOv8晶圆体缺识别检测系统(项目源码+YOLO数据集+模型权重+UI界面+python+深度学习+环境配置)
摘要 晶圆制造过程中的缺陷检测是保证芯片良率的关键环节。本文基于YOLOv8目标检测算法,构建了一套针对晶圆表面9类典型缺陷的自动检测系统。所识别的缺陷类型包括:Center、Donut、Edge-Loc、Edge-Ring、Loc、Near-full、None、Random、Scratch。模型在…...

Qri高级功能:如何使用JSON Schema验证和描述数据集结构
Qri高级功能:如何使用JSON Schema验证和描述数据集结构 【免费下载链接】qri youre invited to a data party! 项目地址: https://gitcode.com/gh_mirrors/qr/qri Qri是一个强大的开源数据协作工具,它提供了丰富的功能来帮助用户管理、共享和验证…...

基于Netburner NANO54415构建工业级嵌入式Web服务器:从硬件选型到广域监控实战
1. 项目概述:一个为广域与本地监控而生的嵌入式Web服务器如果你正在寻找一个能部署在野外、工厂角落或者任何需要远程数据采集与控制场景下的嵌入式Web服务器方案,并且对市面上那些要么性能孱弱、要么开发门槛极高的开发板感到厌倦,那么这个基…...

通过用量看板分析团队大模型API消耗发现优化调用策略的机会
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过用量看板分析团队大模型API消耗发现优化调用策略的机会 作为团队的技术负责人,确保大模型API调用在满足业务需求的…...
)
实战对比:用直方图均衡化与CLAHE拯救你的背光/过曝照片(附Python完整代码)
拯救逆光废片:直方图均衡化与CLAHE的实战效果对比每次旅行回来整理照片时,总会有几张因为光线问题几乎要删除的废片——要么是逆光下的人脸黑得看不清五官,要么是天空过曝失去所有云层细节。这些照片往往记录着重要时刻,直接删除实…...

告别鼠标点击,微博图片批量下载的轻松方案
告别鼠标点击,微博图片批量下载的轻松方案 【免费下载链接】weiboPicDownloader Download weibo images without logging-in 项目地址: https://gitcode.com/gh_mirrors/we/weiboPicDownloader 还记得那个周末的下午吗?你喜欢的博主发布了九宫格美…...

AhMyth位置跟踪:GPS定位与地理围栏技术深度解析
AhMyth位置跟踪:GPS定位与地理围栏技术深度解析 【免费下载链接】AhMyth Cross-Platform Android Remote Administration Tool | The only maintained version of AhMyth on github | A revival of the original repository at https://GitHub.com/AhMyth/AhMyth-An…...

ubuntu环境下为python项目配置taotoken多模型api密钥与端点
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Ubuntu环境下为Python项目配置Taotoken多模型API密钥与端点 1. 准备工作 在Ubuntu系统上为Python项目接入Taotoken,首…...