Canny算法原理和应用
Canny算法的原理
使用高斯滤波器滤波
使用 Sobel 滤波器滤波获得在 x 和 y 方向上的输出,在此基础上求出梯度的强度和梯度的角度
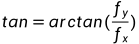
edge为边缘强度,tan为梯度方向
上图表示的是中心点的梯度向量、方位角以及边缘方向(任一点的边缘与梯度向量正交)
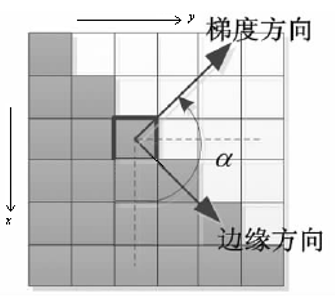
对梯度角度进行量化处理
划重点:是沿着梯度方向对幅值进行非极大值抑制,而非边缘方向,这里初学者容易弄混。
例如:3*3区域内,边缘可以划分为垂直、水平、45°、135°4个方向,同样,梯度反向也为四个方向(与边缘方向正交)。因此为了进行非极大值,将所有可能的方向量化为4个方向,如下图:
量化后的情况可以总结为:

根据梯度角度对边缘强度进行非极大值抑制(Non-maximum suppression),使图像边缘变得更细
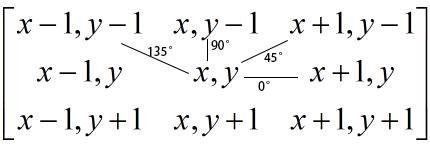
非极大值抑制算法:0°时取(x,y)、(x+1,y)、(x-1,y) 中的最大值,其它角度类似
使用滞后阈值对图像进行二值化处理,优化图像显示效果
选取系数TH和TL,比率为2:1或3:1。(一般取TH=0.3或0.2,TL=0.1);
b. 将小于低阈值的点抛弃,赋0;将大于高阈值的点立即标记(这些点为确定边缘点),赋1或255;
c. 将小于高阈值,大于低阈值的点使用8连通区域确定(即:只有与TH像素连接时才会被接受,成为边缘点,赋 1或255)
python算法实现
import cv2
import numpy as np
import matplotlib.pyplot as pltdef Canny(img):# Gray scaledef BGR2GRAY(img):b = img[:, :, 0].copy()g = img[:, :, 1].copy()r = img[:, :, 2].copy()# Gray scaleout = 0.2126 * r + 0.7152 * g + 0.0722 * bout = out.astype(np.uint8)return out# Gaussian filter for grayscaledef gaussian_filter(img, K_size=3, sigma=1.4):if len(img.shape) == 3:H, W, C = img.shapegray = Falseelse:img = np.expand_dims(img, axis=-1)H, W, C = img.shapegray = True## Zero paddingpad = K_size // 2out = np.zeros([H + pad * 2, W + pad * 2, C], dtype=np.float)out[pad : pad + H, pad : pad + W] = img.copy().astype(np.float)## prepare KernelK = np.zeros((K_size, K_size), dtype=np.float)for x in range(-pad, -pad + K_size):for y in range(-pad, -pad + K_size):K[y + pad, x + pad] = np.exp( - (x ** 2 + y ** 2) / (2 * sigma * sigma))#K /= (sigma * np.sqrt(2 * np.pi))K /= (2 * np.pi * sigma * sigma)K /= K.sum()tmp = out.copy()# filteringfor y in range(H):for x in range(W):for c in range(C):out[pad + y, pad + x, c] = np.sum(K * tmp[y : y + K_size, x : x + K_size, c])out = np.clip(out, 0, 255)out = out[pad : pad + H, pad : pad + W]out = out.astype(np.uint8)if gray:out = out[..., 0]return out# sobel filterdef sobel_filter(img, K_size=3):if len(img.shape) == 3:H, W, C = img.shapeelse:H, W = img.shape# Zero paddingpad = K_size // 2out = np.zeros((H + pad * 2, W + pad * 2), dtype=np.float)out[pad : pad + H, pad : pad + W] = img.copy().astype(np.float)tmp = out.copy()out_v = out.copy()out_h = out.copy()## Sobel verticalKv = [[1., 2., 1.],[0., 0., 0.], [-1., -2., -1.]]## Sobel horizontalKh = [[1., 0., -1.],[2., 0., -2.],[1., 0., -1.]]# filteringfor y in range(H):for x in range(W):out_v[pad + y, pad + x] = np.sum(Kv * (tmp[y : y + K_size, x : x + K_size]))out_h[pad + y, pad + x] = np.sum(Kh * (tmp[y : y + K_size, x : x + K_size]))out_v = np.clip(out_v, 0, 255)out_h = np.clip(out_h, 0, 255)out_v = out_v[pad : pad + H, pad : pad + W]out_v = out_v.astype(np.uint8)out_h = out_h[pad : pad + H, pad : pad + W]out_h = out_h.astype(np.uint8)return out_v, out_h# get edge strength and edge angledef get_edge_angle(fx, fy):# get edge strengthedge = np.sqrt(np.power(fx.astype(np.float32), 2) + np.power(fy.astype(np.float32), 2))edge = np.clip(edge, 0, 255)# make sure the denominator is not 0fx = np.maximum(fx, 1e-10)#fx[np.abs(fx) <= 1e-5] = 1e-5# get edge angleangle = np.arctan(fy / fx)return edge, angle# 将角度量化为0°、45°、90°、135°def angle_quantization(angle):angle = angle / np.pi * 180angle[angle < -22.5] = 180 + angle[angle < -22.5]_angle = np.zeros_like(angle, dtype=np.uint8)_angle[np.where((angle <= 22.5) | (angle > 157.5))] = 0_angle[np.where((angle > 22.5) & (angle <= 67.5))] = 45_angle[np.where((angle > 67.5) & (angle <= 112.5))] = 90_angle[np.where((angle > 112.5) & (angle <= 157.5))] = 135return _angledef non_maximum_suppression(angle, edge):H, W = angle.shape_edge = edge.copy()for y in range(H):for x in range(W):if angle[y, x] == 0:dx1, dy1, dx2, dy2 = -1, 0, 1, 0elif angle[y, x] == 45:dx1, dy1, dx2, dy2 = -1, 1, 1, -1elif angle[y, x] == 90:dx1, dy1, dx2, dy2 = 0, -1, 0, 1elif angle[y, x] == 135:dx1, dy1, dx2, dy2 = -1, -1, 1, 1# 边界处理if x == 0:dx1 = max(dx1, 0)dx2 = max(dx2, 0)if x == W-1:dx1 = min(dx1, 0)dx2 = min(dx2, 0)if y == 0:dy1 = max(dy1, 0)dy2 = max(dy2, 0)if y == H-1:dy1 = min(dy1, 0)dy2 = min(dy2, 0)# 如果不是最大值,则将这个位置像素值置为0if max(max(edge[y, x], edge[y + dy1, x + dx1]), edge[y + dy2, x + dx2]) != edge[y, x]:_edge[y, x] = 0return _edge# 滞后阈值处理二值化图像# > HT 的设为255,< LT 的设置0,介于它们两个中间的值,使用8邻域判断法def hysterisis(edge, HT=100, LT=30):H, W = edge.shape# Histeresis thresholdedge[edge >= HT] = 255edge[edge <= LT] = 0_edge = np.zeros((H + 2, W + 2), dtype=np.float32)_edge[1 : H + 1, 1 : W + 1] = edge## 8 - Nearest neighbornn = np.array(((1., 1., 1.), (1., 0., 1.), (1., 1., 1.)), dtype=np.float32)for y in range(1, H+2):for x in range(1, W+2):if _edge[y, x] < LT or _edge[y, x] > HT:continueif np.max(_edge[y-1:y+2, x-1:x+2] * nn) >= HT:_edge[y, x] = 255else:_edge[y, x] = 0edge = _edge[1:H+1, 1:W+1]return edge# grayscalegray = BGR2GRAY(img)# gaussian filteringgaussian = gaussian_filter(gray, K_size=5, sigma=1.4)# sobel filteringfy, fx = sobel_filter(gaussian, K_size=3)# get edge strength, angleedge, angle = get_edge_angle(fx, fy)# angle quantizationangle = angle_quantization(angle)# non maximum suppressionedge = non_maximum_suppression(angle, edge)# hysterisis thresholdout = hysterisis(edge, 80, 20)return outif __name__ == '__main__':# Read imageimg = cv2.imread("../paojie.jpg").astype(np.float32)image = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY).astype(np.uint8)# Cannyedge = Canny(img)out = edge.astype(np.uint8)# Save resultcv2.imshow('src and canny', np.hstack((image, out)))cv2.waitKey(0)cv2.destroyAllWindows()
参考链接:
https://www.cnblogs.com/wojianxin/p/12533526.html
https://blog.csdn.net/weixin_40647819/article/details/91411424
相关文章:
Canny算法原理和应用
Canny算法的原理使用高斯滤波器滤波使用 Sobel 滤波器滤波获得在 x 和 y 方向上的输出,在此基础上求出梯度的强度和梯度的角度edge为边缘强度,tan为梯度方向上图表示的是中心点的梯度向量、方位角以及边缘方向(任一点的边缘与梯度向量正交&am…...
数据挖掘(2.2)--数据预处理
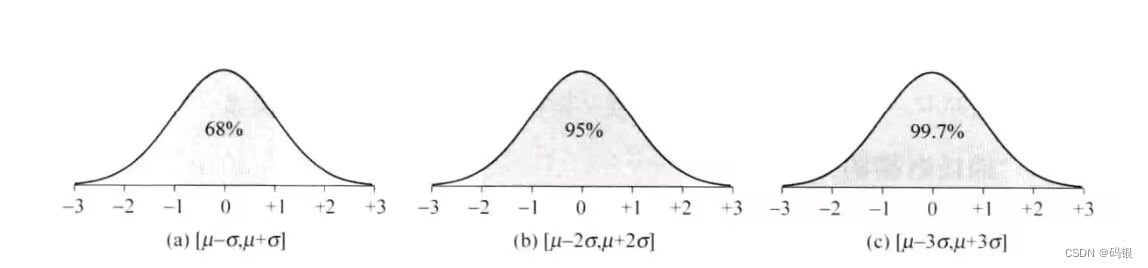
目录 二、数据描述 1.描述数据中心趋势 1.1平均值和截断均值 1.2加权平均值 1.3中位数(Median)和众数(Mode) 2.描述数据的分散程度 2.1箱线图 2.2方差和标准差 2.3正态分布 3.数据清洗 3.1数据缺失的处理 3.2数据清洗 二、数据描述 描述数…...

JVM堆与堆调优以及出现OOM如何排查
调优的位置——堆 Heap,一个JVM只有一个堆内存,堆内存的大小是可以调节的。 类加载器读取了类文件后,一般会把什么东西放到堆中?类,方法,常量,变量~,保存我们所有引用类型的真实对象; 堆内存中…...
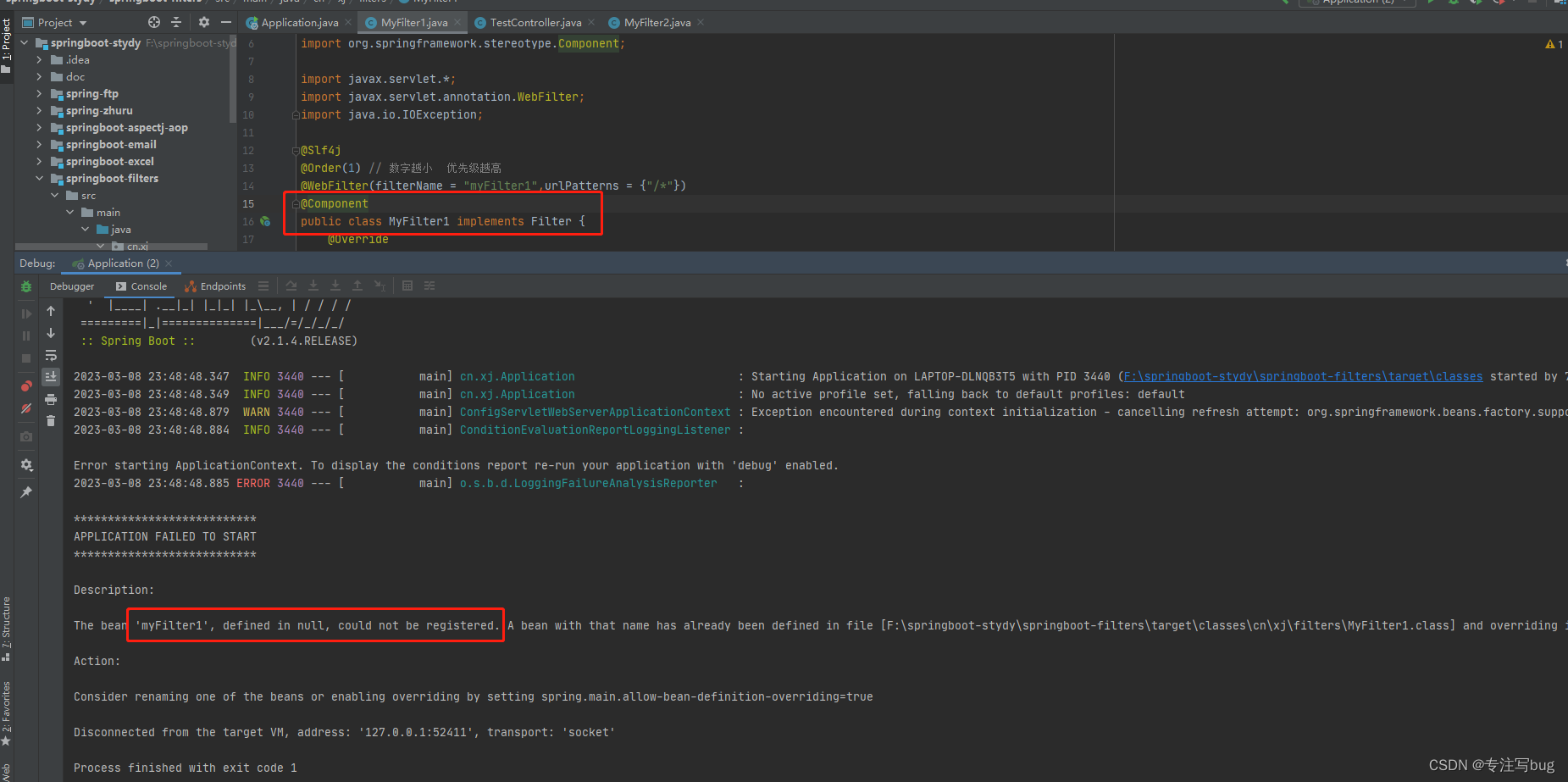
Springboot——自定义Filter使用测试总结
文章目录前言自定义过滤器并验证关于排除某些请求的方式创建测试接口请求测试验证异常过滤器的执行流程注意事项资料参考前言 在Java-web的开发领域,对于过滤器和拦截器用处还是很多,但两者的概念却极易混淆。 过滤器和拦截器都是采用AOP的核心思想&am…...
软件测试(进阶篇)(1)
一)如何根据需求来设计测试用例? 1)验证功能的正确性,合理性,无二义性,逻辑要正确 2)分析需求,细化需求,从需求中提取出测试项,根据测试项找到测试点,根据测试点具体的来进行设计测试…...
大白话深入探索多表关联的SQL语句到底是如何执行的?(1))
(七十三)大白话深入探索多表关联的SQL语句到底是如何执行的?(1)
今天我们来继续跟大家聊聊多表关联语句是如何执行的这个问题,上次讲了一个最最基础的两个表关联的语句和执行过程,其实今天我们稍微来复习一下,然后接着上次的内容,引入一个“内连接”的概念来。 假设我们有一个员工表࿰…...
SYSU程设c++(第三周) 对象类、类的成员、类与结构体的区别、类的静态成员
对象&类 类用于指定对象的形式,它包含数据的表示方法和用于处理数据的方法。 • 类中的数据和方法称为类的成员。 • 函数在一个类中也被称为类的成员。 定义一个类,其效果是定义一个数据类型的蓝图。它定义了类的对象包括了什么,以及可…...

Redis管道
目录 1、什么是管道? 2、案例演示 3、注意事项 4、面试题 1、什么是管道? 管道(pipeline)可以一次性发送多条命令给服务端,服务端依次处理完,通过一条响应一次性将结果返回,减少 IO 的次数&…...

conda的共用package[硬链接]@pytorch和tensorflow装在同一个环境里好不好?
文章目录refpackage复用(指定同版本)conda install 比pip install 更可能节省空间pytorch和tensorflow装在同一个环境里?导入依赖导入依赖试验ref python - Can packages be shared across Anaconda environments? - Stack OverflowManaging environments — conda 23.1.0.p…...
「Vue面试题」动态给vue的data添加一个新的属性时会发生什么?怎样去解决的?
一、直接添加属性的问题 我们从一个例子开始 定义一个p标签,通过v-for指令进行遍历 然后给botton标签绑定点击事件,我们预期点击按钮时,数据新增一个属性,界面也 新增一行 <p v-for"(value,key) in item" :key&q…...
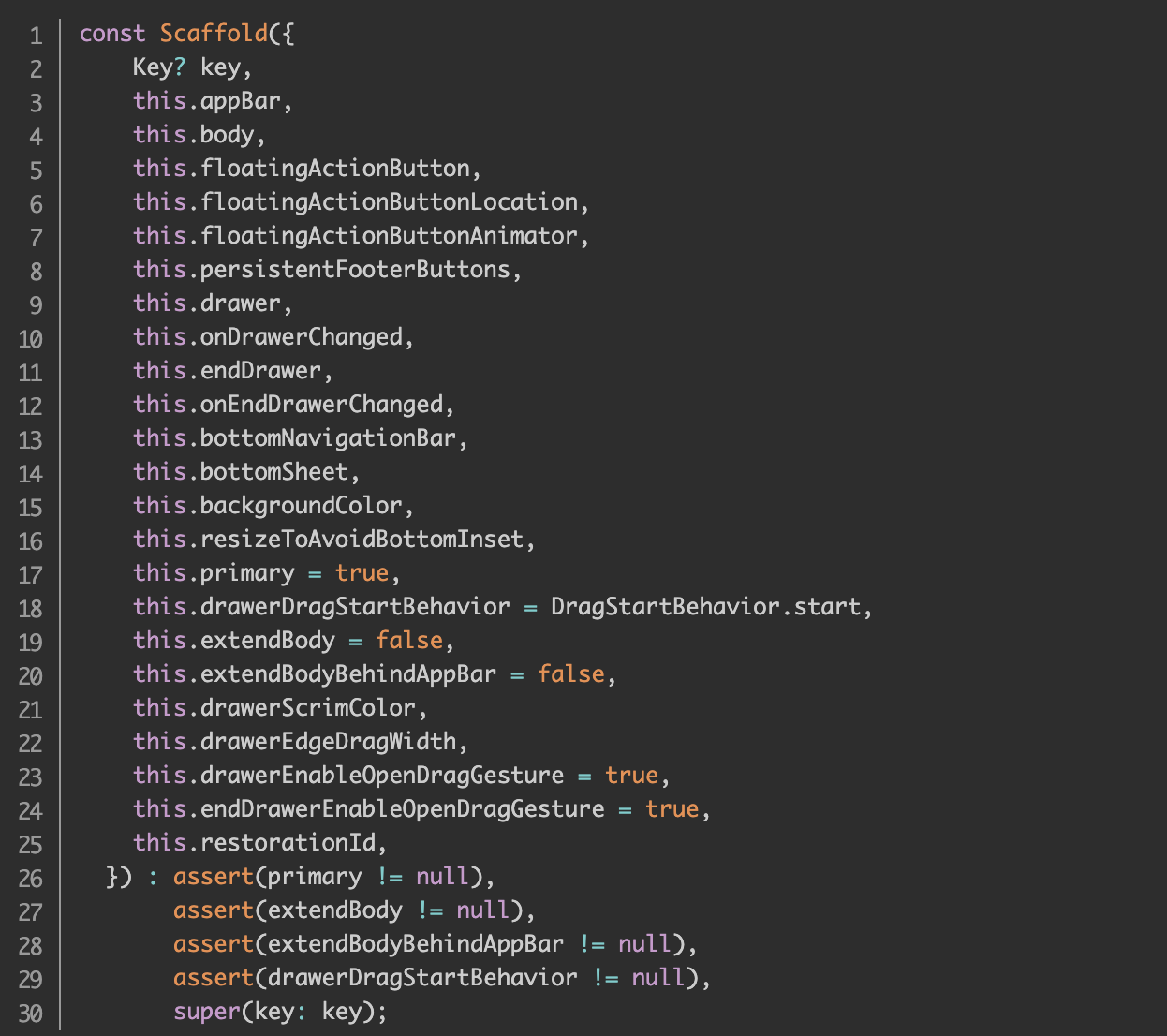
Flutter-Scaffold组件
在Flutter开发当中,我们可能会遇到以下的需求:实现页面组合使用,比如说有悬浮按钮、顶部菜单栏、左右抽屉侧边栏、底部导航栏等等效果。Scaffold组件可以帮我们实现上面需求说的效果。这篇博客主要分享容器组件的Scaffold组件的使用ÿ…...
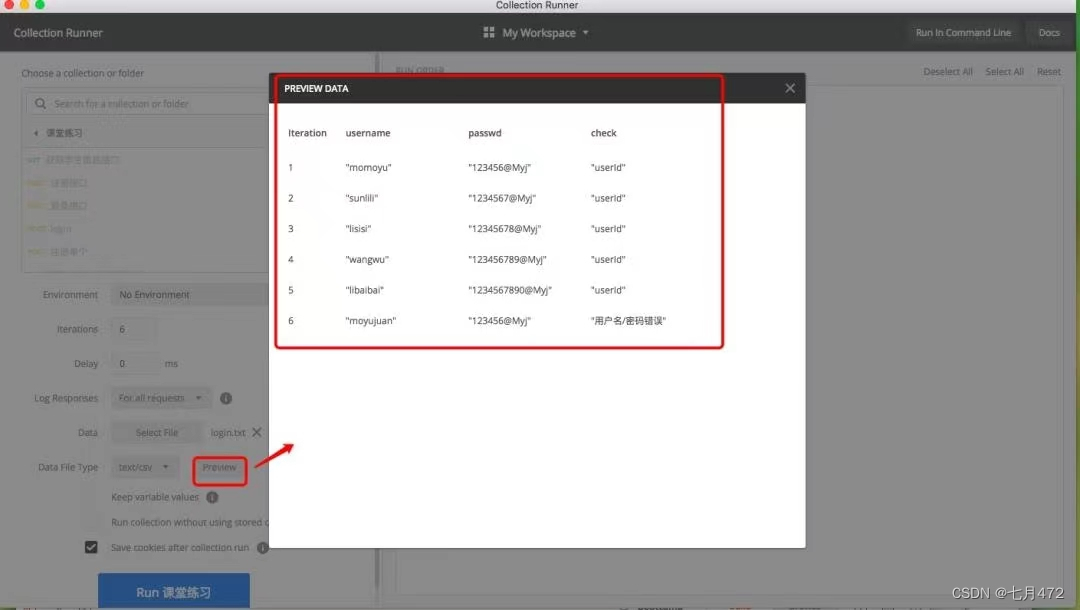
Postman简介及接口测试流程(小菜鸟攻略)
目录 前言 一、常见接口 二、前端和后端 三、什么是接口测试 四、接口组成 1、接口说明 2、调用url 3、请求方法(get\post) 4、请求参数、参数类型、请求参数说明 5、返回参数说明 五、为什么要做接口测试 本章主要介绍如何使用postman做接口…...

kubebuilder注释
标记语法Empty kubebuilder:validation:Optional:空标记像命令行中的布尔标记位-- 仅仅是指定他们来开启某些行为。Anonymous kubebuilder:validation:MaxItems2:匿名标记使用单个值作为参数。Multioption kubebuilder:printcolumn:JSONPath".statu…...

java日志
日志是软件开发的重要组成部分。一个精心编写的日志代码提供快速的调试,维护方便,以及应用程序的运行时信息结构化存储。日志记录确实也有它的缺点。它可以减缓的应用程序Log4jLog4j是Apache的一个开放源代码项目,通过使用Log4j,我…...
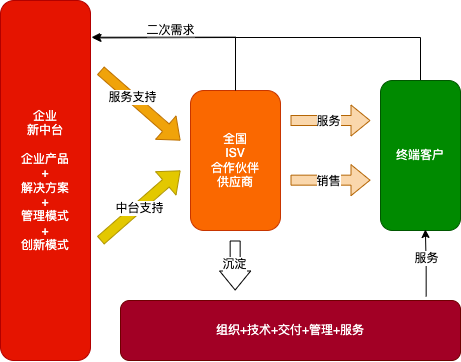
研发中台拆分过程的一些心得总结
背景在 21 年,中台拆分在 21 年,以下为中台拆分的过程心得,带有一定的主观,偏向于中小团队中台建设参考(这里的中小团队指 3-100 人的团队),对于大型团队不太适用,毕竟大型团队人中 …...
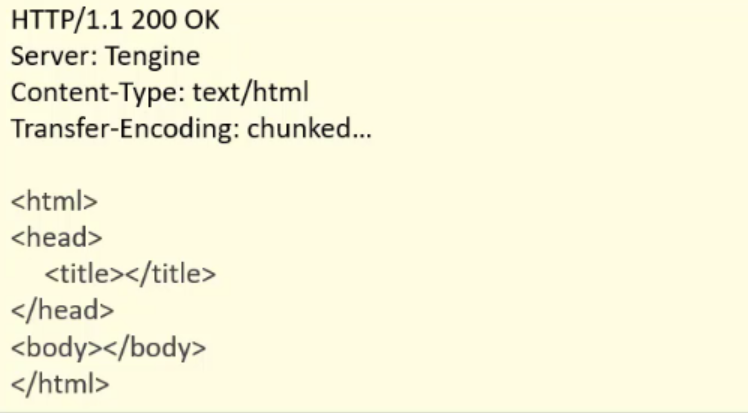
HTTP介绍
HTTP1、简介HTTP概念:HyperText Transfer Protocol,超文本传输协议,规定了浏览器和服务器之间数据传输的规则。数据传输的规则指的是请求数据和响应数据需要按照指定的格式进行传输。如果想知道具体的格式,可以打开浏览器…...

10 卷积神经网络及python实现
1 卷积神经网络简介 卷积神经网络(Convolutional Neural Network, CNN)由LeCun在上世纪90年代提出。 LeCun Y., Bottou L., Bengio Y., and Haffner P., Gradient-based learning applied to document recognition, Proceedings of the IEEE, pp. 1-7, 1998. 卷积核和特征图&…...
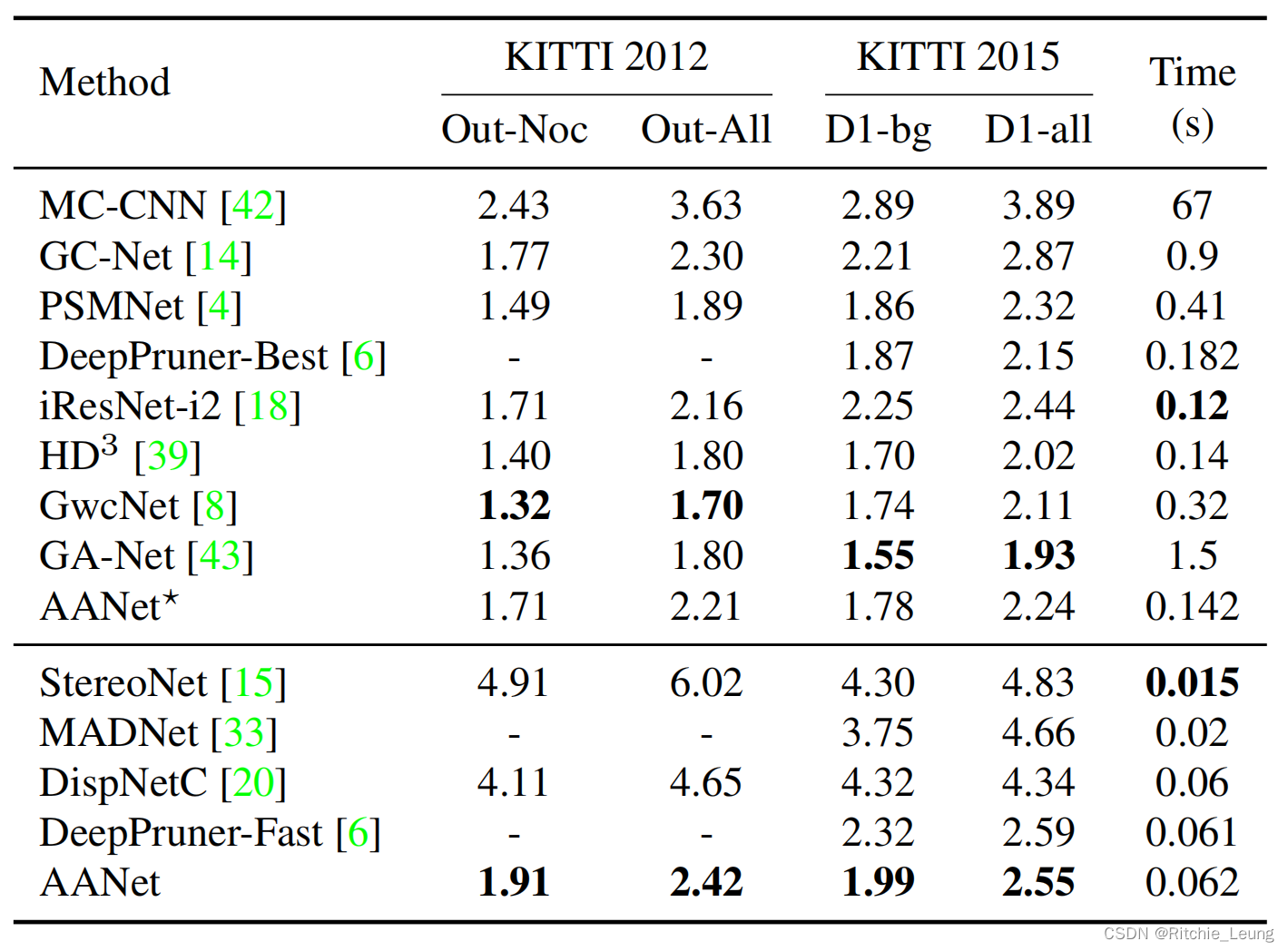
【立体匹配论文阅读】AANet: Adaptive Aggregation Network for Efficient Stereo Matching
Authors: Haofei Xu, Juyong Zhang Link: https://arxiv.org/abs/2004.09548 Years: 2020 Credit Novelty and Question set up 主流的立体匹配模型的代价聚合操作主要用了3D卷积,这部分操作的算力和内存消耗过大,因此作者提出一种新的模型AANet&#x…...

服务器防入侵攻击,安全加固措施
服务器防入侵攻击,安全加固措施当服务器被入侵,被攻击的时候,很多服务器维护人员不懂得如何去防止入侵,防止黑客的攻击,只能眼巴巴的看着服务器被任意的攻击,给服务器上的网站造成严重的经济损失࿰…...

解读:“出境标准合同”与“出境安全评估”要点与异同
《数据安全法》第四条及《个人信息保护法》第三章对数据出境、个人信息跨境提出明确要求,《数据安全法》与《个人信息保护法》存在互相包含、被包含、衔接、特性、独立性、相互补充等内涵。本文通过上位法互相衔接、关联、特性的思路,去观察《个人信息出…...

Raspberry Pi Imager:树莓派系统安装的终极解决方案
Raspberry Pi Imager:树莓派系统安装的终极解决方案 【免费下载链接】rpi-imager The home of Raspberry Pi Imager, a user-friendly tool for creating bootable media for Raspberry Pi devices. 项目地址: https://gitcode.com/gh_mirrors/rp/rpi-imager …...

TMSpeech:开源本地语音转文字工具的隐私革命
TMSpeech:开源本地语音转文字工具的隐私革命 【免费下载链接】TMSpeech 腾讯会议摸鱼工具 项目地址: https://gitcode.com/gh_mirrors/tm/TMSpeech 在数字化办公浪潮中,语音转文字工具已成为效率提升的关键助手,但云端处理的隐私泄露风…...

基于STM32单片机扫地机器人仿真系统设计 1、使用 STM32 单片机作为核心控制器
基于STM32单片机扫地机器人仿真系统设计 1、使用 STM32 单片机作为核心控制器; 2、选择超声波(1个)、红外线(两个,放在左右)两种传感器进行有效地避障; 3、使用角度传感器 MPU6050 测量角度,检测扫地机器人的运动状态,是否有倾倒; 4、OLED 屏显示超声波距…...

实战react项目:基于快马ai快速构建包含图表与导航的用户数据仪表盘
最近在做一个用户数据仪表盘项目,正好用React配合Ant Design实现了一套完整的界面。这种包含导航、图表和动态数据的页面在后台系统中很常见,记录下我的实现思路和踩坑经验。 项目结构规划 首先用create-react-app初始化项目,然后按功能模块…...
ControlNet 原理与指南)
扩散模型之(十八)ControlNet 原理与指南
概述在当今瞬息万变的科技环境中,如何在人类创造力和机器精确性之间取得平衡变得日益重要。而这正是我们ControlNet发挥作用的地方——它如同“引导之手”,为基于扩散的文本到图像合成模型提供指导,从而解决传统图像生成模型中常见的局限性。…...
的集成与坐标纠偏方案)
Cesium 三维地图开发实战:主流在线底图(天地图、高德、百度等)的集成与坐标纠偏方案
1. 三维地图开发中的底图选择困境 第一次用Cesium加载国内在线地图时,我被满屏错位的道路和建筑搞懵了。明明在二维地图里精准对齐的学校操场,在三维场景里却飘到了隔壁小区。这种"灵魂出窍"般的偏移现象,其实是不同坐标系之间的&q…...

MTK手机屏显干扰全解析:亮灭屏、射频干扰与TP失灵,我是如何用PLL_CLOCK和Porch参数解决的
MTK手机屏显干扰全解析:亮灭屏、射频干扰与TP失灵实战解决方案 引言:当屏幕开始"跳舞"——移动设备显示异常背后的复杂世界 那块6.5英寸的OLED屏幕又一次在通话过程中突然闪烁起来,像被无形的幽灵操控着。作为MTK平台驱动开发工程师…...

啪」的一声脆响,空气击穿时那道紫色电弧总能让人心头一紧。咱们今天用COMSOL做个好玩的——计算两根针尖电极间的击穿电压,看看电场怎么在金属尖角处「拧麻花
comsol放电电极击穿空气模拟,计算击穿间隙的电压,周围附近的电场老规矩,先画个直径10mm的球头圆柱电极,对面放个尖角曲率半径0.1mm的针电极,间隙留5mm。材料库选「空气」,但要注意击穿模型得用自定义的。物…...

PyTorch 2.8镜像代码实例:使用预装torchaudio+FFmpeg实现TTS+视频合成Pipeline
PyTorch 2.8镜像代码实例:使用预装torchaudioFFmpeg实现TTS视频合成Pipeline 1. 环境准备与快速验证 在开始之前,我们先确认环境是否正常工作。这个PyTorch 2.8镜像已经预装了所有必要的组件,包括torchaudio和FFmpeg。 1.1 验证GPU可用性 …...

OpCore-Simplify:黑苹果配置的自动化革命——从复杂调试到一键配置的智能解决方案
OpCore-Simplify:黑苹果配置的自动化革命——从复杂调试到一键配置的智能解决方案 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 传统黑苹…...