DiffMap:首个利用LDM来增强高精地图构建的网络
论文标题:
DiffMap: Enhancing Map Segmentation with Map Prior Using Diffusion Model
论文作者:
Peijin Jia, Tuopu Wen, Ziang Luo, Mengmeng Yang, Kun Jiang, Zhiquan Lei, Xuewei Tang, Ziyuan Liu, Le Cui, Kehua Sheng, Bo Zhang, Diange Yang
导读:
首个利用潜在扩散模块(Latent Diffusion Model)对地图分割掩码的结构化先验进行建模的新方法,基于该技术,现有语义分割方法的性能可以得到显著提升,并同时提高生成地图的质量。©️【深蓝AI】编译
1. 背景介绍
对自动驾驶车辆来说,高清(HD)地图能够帮助其提高对环境理解(感知)的准确度和导航的精度。然而,人工建图面临繁杂和高成本的问题。为此,当前研究将地图构建集成到BEV(鸟瞰视角)感知任务中,在BEV空间中构建栅格化HD地图视为一个分割任务,可以理解为获得BEV特征后增加使用类似于FCN(全卷积网络)的分割头。例如,HDMapNet通过LSS(Lift,Splat,Shoot)编码传感器特征,然后采用多分支FCN进行语义分割、实例检测和方向预测来构建地图。
但目前此类方法(基于像素的分类方法)仍存在固有局限性,包括可能忽略特定类别属性,这可能导致分隔带扭曲和中断、行人横道模糊以及其他类型的伪影和噪声,如图1(a)所示。这些问题不仅影响地图的结构精度,还可能直接影响自动驾驶系统的下游路径规划模块。

图1|HDMapNet,DiffMap和GroundTruth效果对比©️【深蓝AI】编译
因此,模型最好能考虑HD地图的结构先验信息,如车道线的平行和笔直特性。一些生成模型在捕捉图像真实性和固有特性具备这样的能力。例如,LDM(潜在扩散模型)在高保真图像生成方面展现了巨大潜力,并在与分割增强相关的任务中证明了其有效性。另外,还可以通过引入控制变量,进一步指导图像的生成以满足特定的控制要求。因此,将生成模型应用于捕捉地图结构先验,有望减少分割伪影并提高地图构建性能。
在本文中,作者提出DiffMap网络。该网络首次通过使用改进的LDM作为增强模块,对现有的分割模型进行地图结构化先验建模并支持即插即用。DiffMap不仅能通过添加和删除噪声的过程学习地图先验,还可以将BEV特征集成为控制信号,以确保输出与当前帧观测相匹配。实验结果表明,DiffMap能够有效地生成更加平滑合理的地图分割结果,同时极大地减少了伪影,提高了整体的地图构建性能。
2. 相关工作
2.1 语义地图构建
在传统的高清(HD)地图构建中,语义地图通常是基于激光雷达点云手动或半自动标注的。一般基于SLAM的算法来构建全局一致的地图,并手动为地图添加语义标注。然而,这种方法费时费力,同时在更新地图方面也存在极大挑战,从而限制了其可扩展性和实时性能。
HDMapNet提出了一种使用车载传感器动态构建局部语义地图的方法。它将激光雷达点云和全景图像特征编码到鸟瞰视图(BEV)空间,并使用三个不同的头部进行解码,最终产生一个矢量化的局部语义地图。SuperFusion专注于构建远程高精度语义地图,利用激光雷达深度信息增强图像深度估计,并使用图像特征引导远程激光雷达特征预测。然后采用类似于HDMapNet的地图检测头获得语义地图。MachMap将任务划分为折线检测和多边形实例分割,并使用后处理来细化掩码以获得最终结果。后续的研究聚焦在端到端在线建图,直接获得矢量化的高清地图。无需手动标注的语义地图动态构建有效地降低了构建成本。
2.2 扩散模型应用于分割和检测
去噪扩散概率模型(DDPMs)是基于马尔可夫链的一类生成模型,在图像生成等领域展现出优秀的性能,并逐步扩展到分割和检测等各种任务。SegDiff将扩散模型应用于图像分割任务,其中使用的UNet编码器进一步解耦为三个模块:E、F和G。模块G和F分别编码输入图像I和分割图,然后在E中通过加法合并,以迭代地细化分割图。DDPMS使用基础分割模型产生初始预测先验,并利用扩散模型对先验进行细化。DiffusionDet将扩散模型扩展到目标检测框架,将目标检测建模为从噪声框到目标框的去噪扩散过程。
扩散模型也应用于自动驾驶领域,如MagicDrive利用几何约束合成街景,以及Motiondiffuser将扩散模型扩展到多智能体运动预测问题。
2.3 地图先验
目前有几种方法通过利用先验信息(包括显式的标准地图信息和隐式的时间信息)来增强模型鲁棒性,减少车载传感器的不确定性。MapLite2.0以标准定义(SD)先验地图为起点,并结合车载传感器实时推断局部高清地图。MapEx和SMERF利用标准地图数据改善车道感知和拓扑理解。SMERF采用基于Transformer的标准地图编码器编码车道线和车道类型,然后计算标准地图信息与基于传感器的鸟瞰视图(BEV)特征之间的交叉注意力,以集成标准地图信息。NMP通过将过去的地图先验数据与当前感知数据相结合,为自动驾驶汽车提供长期记忆能力。MapPrior结合判别式和生成式模型,在预测阶段将基于现有模型生成的初步预测编码为先验,注入生成模型的离散潜在空间,然后使用生成模型进行细化预测。PreSight利用先 前行程的数据优化城市尺度的神经辐射场,生成神经先验,增强后续导航中的在线感知。
3. 方法精析
3.1 准备工作
DDPMs是一种利用扩散过程来近似潜在数据分布 p ( x ) p(x) p(x)的生成模型。它们的工作原理是从一个服从正态分布的变量中去除噪声,模拟了预置长度为 T T T的马尔可夫链的逆向操作。在DDPMs中,从干净的初始数据分布 x 0 {\mathbf x}_0 x0到噪声数据集 x T \mathbf x_T xT的转换是通过一系列条件概率 q ( x t ∣ x t − 1 ) q(\mathbf x_t|\mathbf x_{t-1}) q(xt∣xt−1)来实现的,其中 q q q表示噪声引入过程。在每一步 t t t,噪声根据以下规范添加:
q ( x t ∣ x t − 1 ) = N ( x t ; 1 − β t x t − 1 , β t I ) ( 1 ) q(\mathbf x_t|\mathbf x_{t-1}) = \mathcal N(\mathbf x_t;\sqrt{1-\beta_t}\mathbf x_{t-1}, \beta_t \mathbf I)\qquad(1) q(xt∣xt−1)=N(xt;1−βtxt−1,βtI)(1)
其中 β t \beta_t βt是噪声水平的调节器, N \mathcal N N表示正态分布, I I I是单位矩阵。这一过程的最终结果是 x T \mathbf x_T xT变得与随机噪声无异。随后的去噪机制是一个从 x T \mathbf x_T xT到 x 0 \mathbf x_0 x0的迭代重建过程,由去噪网络 ϵ θ \epsilon_\theta ϵθ驱动,该网络估计并逐步细化干净的数据点。去噪函数描述如下:
p θ ( x t ∣ x t − 1 ) = N ( x t − 1 ; μ θ ( x t , t ) , Σ θ ( x t , t ) ) ( 2 ) p_\theta(\mathbf x_t|\mathbf x_{t-1}) = \mathcal N(\mathbf x_{t-1};\mu_\theta(\mathbf x_t, t),\Sigma_\theta(\mathbf x_t, t))\qquad(2) pθ(xt∣xt−1)=N(xt−1;μθ(xt,t),Σθ(xt,t))(2)
这里, μ θ \mu_\theta μθ和 Σ θ \Sigma_\theta Σθ分别表示去噪网络 ϵ θ \epsilon_\theta ϵθ估计的均值和协方差。
类似地,潜在扩散模型(LDMs)采用增量式去噪方法,在更紧凑高效的潜在空间中运作。这种降维去除了通常无法感知的高频细节,使模型能够集中捕捉数据的核心语义特征。这种效率使LD(潜在空间)更适合基于似然的生成模型,而不是计算量大的高维像素空间。LDMs的目标函数表述如下:
L L D M = E x , ϵ ∼ N ( 0 , 1 ) , t [ ∥ ϵ − ϵ θ ( z t , t ) ∥ 2 ] ( 3 ) L_{LDM} = \mathbb E_{\mathbf x,\epsilon \sim \mathcal N(0,1),t}[\parallel \epsilon - \epsilon_\theta(\mathbf z_t, t) \parallel^2]\qquad(3) LLDM=Ex,ϵ∼N(0,1),t[∥ϵ−ϵθ(zt,t)∥2](3)
LDMs的去噪核心,由 ϵ θ \epsilon_\theta ϵθ表示,被实例化为一个时间条件的UNet。由于噪声引入过程是确定性的, z t \mathbf z_t zt可以在训练期间从 ϵ \epsilon ϵ高效地获得,模型能够通过单次前向传播网络 D D D从 p ( z ) p(\mathbf z) p(z)生成图像。这种方法不仅提高了图像合成效率,而且在训练和推理阶段都能以显著较低的计算成本产生高保真图像。
此外,在这些模型中集成条件去噪函数 ϵ θ ( z t , t , y ) \epsilon_\theta(\mathbf z_t, t, \mathbf y) ϵθ(zt,t,y)允许在受各种输入形式 y \mathbf y y(包括文本注释、语义地图和更广泛的图像到图像转换)影响时进行受控合成过程。条件LDM通过关注条件输入和潜在表示之间的相互作用的过程进行学习,其目标函数表述为:
L L D M = E x , y , ϵ ∼ N ( 0 , 1 ) , t [ ∥ ϵ − ϵ θ ( z t , t , τ θ ( y ) ) ∥ 2 ] ( 4 ) L_{LDM} = \mathbb E_{\mathbf x,\mathbf y,\epsilon \sim \mathcal N(0,1),t}[\parallel \epsilon - \epsilon_\theta(\mathbf z_t, t, \tau_\theta(\mathbf y)) \parallel^2]\qquad(4) LLDM=Ex,y,ϵ∼N(0,1),t[∥ϵ−ϵθ(zt,t,τθ(y))∥2](4)
这种配置确保了和的联合优化,展示了条件机制的适应性。
3.2 整体架构
如图2所示。DiffMap作为解码器,将扩散模型纳入语义地图分割模型,该模型以周围多视角图像和LiDAR点云作为输入,将其编码为BEV空间并获得融合的BEV特征。然后采用DiffMap作为解码器生成分割图。在DiffMap模块中,将BEV特征作为条件来引导去噪过程。

图2|DiffMap架构©️【深蓝AI】编译
· 语义地图构建的基线:
基线主要遵循BEV编码器-解码器范式。编码器部分负责从输入数据(LiDAR和/或相机数据)中提取特征,将其转换为高维表示。同时,解码器通常作为分割头,将高维特征表示映射到相应的分割图。基线在整个框架中起两个主要作用:监督者和控制器。作为监督者,基线生成分割结果作为辅助监督。同时,作为控制器,它提供中间BEV特征 B ∈ R H × W × C \mathcal B \in \mathbb R^{H×W×C} B∈RH×W×C作为条件控制变量,以引导扩散模型的生成过程。
· DiffMap模块:
沿袭LDM,作者在基线框架中引入DiffMap模块作为解码器。LDM主要由两部分组成:一个图像感知压缩模块(如VQVAE)和一个使用UNet构建的扩散模型。首先,编码器将地图分割ground truth x \mathbf x x编码为潜在空间中的 z = ε ( x ) ∈ R H ′ × W ′ × D ′ \mathbf z= \varepsilon (\mathbf x) \in \mathbb R^{H'×W'×D'} z=ε(x)∈RH′×W′×D′,其中 D ′ D' D′表示潜在空间的低维度。随后,在低维潜在变量空间中执行扩散和去噪,然后使用解码器 D \mathcal D D将潜在空间恢复到原始像素空间。
首先通过扩散过程添加噪声 σ \sigma σ,在每个时间步 t t t获得噪声潜在图 { z t } t = 0 T \{\mathbf z_t\}_{t=0}^T {zt}t=0T,其中 z 0 = z z_0 = \mathbf z z0=z。然后在去噪过程中,UNet作为噪声预测的主干网络。为了增强分割结果的监督部分,并希望DiffMap模型在训练期间直接为实例相关预测提供语义特征。因此,作者将UNet网络结构分为两个分支,一个分支用于预测噪声 ϵ \epsilon ϵ,如传统扩散模型,另一个分支用于预测潜在空间中的 z \mathbf z z。
如图3所示。获得潜在图预测 z θ \mathbf z_{\theta} zθ后,将其解码到原始像素空间,作为语义特征图。然后就可以按照HDMapNet提出的方法从中获得实例预测,输出三种不同头的预测:语义分割、实例嵌入和车道方向。这些预测随后用于后处理步骤以矢量化地图。

图3|去噪模块©️【深蓝AI】编译
整个过程是一个有条件的生成过程,根据当前传感器输入下获得地图分割结果。其结果的概率分布可以建模为 p θ ( x ∣ y ) p_\theta(\mathbf x|\mathbf y) pθ(x∣y),其中 x \mathbf x x表示地图分割结果, y \mathbf y y表示条件控制变量,即BEV特征。作者这里用了两种方式融合控制变量。首先,由于 z t \mathbf z_t zt和BEV特征 B \mathcal B B在空间域上具有相同的类别和尺度,将 B \mathcal B B调整为潜在空间大小,然后将它们串联作为去噪过程的输入,如公式5所示。
z t ′ = c o n c a t ( z , B ) ( 5 ) \mathbf z_t^{'} = concat(\mathbf z, \mathcal B)\qquad(5) zt′=concat(z,B)(5)
其次,将交叉注意力机制融入到UNet网络的每一层,其中 B \mathcal B B作为key/value, z t \mathbf z_t zt作为query。交叉注意力模块的公式如下:
A t t e n t i o n ( z t ′ , B , B ) = s o f t m a x ( z t ′ B T d ) ⋅ B ( 6 ) Attention(\mathbf z_t^{'}, \mathcal B, \mathcal B) = softmax(\frac{\mathbf z_t^{'} \mathcal B^T}{\sqrt{d}}) \cdot \mathcal B\qquad(6) Attention(zt′,B,B)=softmax(dzt′BT)⋅B(6)
3.3 具体实现
训练:首先训练 VQVAE, 将原始分割的真值压缩到潜在空间中。总的训练目标变为:
L = log p ( x ∣ z q ( x ) ) ⏟ r e c o n s t r u c t i o n s l o s s + ∥ s g [ z e ( x ) − e k ] ∥ 2 2 ⏟ V Q l o s s + β ∥ z e ( x ) − s g [ e ] ∥ 2 2 ⏟ c o m m i t m e n t l o s s ( 7 ) L = \underbrace{\log p(\mathbf x | z_q(\mathbf x))}_{reconstructions \ \ loss} \ + \underbrace{ \parallel sg[z_e(\mathbf x) - e_k] \parallel_2^2 }_{VQ \ loss} +\underbrace{\beta \parallel z_e(\mathbf x) - sg[e] \parallel_2^2 }_{commitment \ \ loss} \qquad(7) L=reconstructions loss logp(x∣zq(x)) +VQ loss ∥sg[ze(x)−ek]∥22+commitment loss β∥ze(x)−sg[e]∥22(7)
其中, z e ( x ) z_e(\mathbf x) ze(x)表示编码器的输出, e e e表示嵌入空间, z q ( x ) z_q(\mathbf x) zq(x)表示 z e ( x ) z_e(\mathbf x) ze(x)在嵌入空间中最近的嵌入,sg 是停止梯度运算符。通过VQVAE,真值图可以被压缩到潜在空间中,提高生成效率并防止扩散模型过度训练图像像素。
在扩散模型的训练过程中,主要目标是最小化预测图像(或噪声)与其真值之间的重建距离。由于将 UNet 分支解耦,训练目标变成:
min θ E q ( x 0 ) E q ( ϵ ) ( ∥ z θ − z ∥ 2 + ∥ ϵ θ − ϵ ∥ 2 ) ( 8 ) \min_\theta \mathbb E_{q(\mathbf x_0)} E_{q(\epsilon)}( \parallel \mathbf z_\theta - \mathbf z \parallel^2 + \parallel \epsilon_\theta - \epsilon \parallel^2)\qquad(8) θminEq(x0)Eq(ϵ)(∥zθ−z∥2+∥ϵθ−ϵ∥2)(8)
其中, z θ \mathbf z_\theta zθ和 ϵ θ \epsilon_\theta ϵθ分别对应于图像分支和噪声分支。随后,模型被训练来分别预测图像和噪声。此外,为了实现更高水平的图像生成准确性,作者还引入了基线模型的损失作为辅助监督,包括语义分割的交叉熵损失和HDMapNet中提到的实例嵌入的判别损失。最终的目标函数将扩散模型的损失 L d i f f L_{diff} Ldiff与基线模型的辅助损失 L b a s e l i n e L_{baseline} Lbaseline结合,如公式9所示:
L = L d i f f + L b a s e l i n e ( 9 ) \mathcal L = \mathcal L_{diff} + \mathcal L_{baseline}\qquad(9) L=Ldiff+Lbaseline(9)
· 推理:
在推理阶段, x 0 \mathbf x_0 x0从一个带噪声的图像开始,并根据训练得到的参数进行迭代去噪。经过多次去噪迭代后得到 z 0 \mathbf z_0 z0,其中噪声变得可以忽略不计。随后,使用VQVAE的解码器将其从潜在空间解码回原始像素空间。对于去噪迭代中的采样,采用DDIM采样器来加速采样。具体通过以下方式从样本 x t \mathbf x_t xt生成样本 x t − 1 \mathbf x_{t-1} xt−1:
x t − 1 = α t − 1 ( x t − 1 − α t ϵ θ ( t ) ( x t ) α t ) ⏟ p r e d i c t e d x 0 + 1 − α t − 1 − σ t 2 ⋅ ϵ θ ( t ) ( x t ) ⏟ d i r e c t i o n p o i n t i n g t o x t + σ t ϵ t ⏟ r a n d o m n o i s e ( 10 ) \mathbf x_{t-1} = \sqrt{\alpha_{t-1}} \underbrace{(\frac{\mathbf x_t - \sqrt{1 - \alpha_t }\epsilon_\theta^{(t)}(\mathbf x_t)}{\sqrt{\alpha_t}})}_{predicted \ x_0} + \underbrace{\sqrt{1 - \alpha_{t-1} - \sigma_t^2 }\cdot \epsilon_\theta^{(t)} (\mathbf x_t)} _{direction \ pointing \ to \ \mathbf x_t} \ + \underbrace{\sigma_t \epsilon_t}_{random \ noise} \qquad(10) xt−1=αt−1predicted x0 (αtxt−1−αtϵθ(t)(xt))+direction pointing to xt 1−αt−1−σt2⋅ϵθ(t)(xt) +random noise σtϵt(10)
其中, ϵ t ∼ N ( 0 , I ) \epsilon_t \sim \mathcal N(0, I) ϵt∼N(0,I)是与 x t \mathbf x_t xt独立的标准高斯噪声。 σ t \sigma_t σt是一个超参数,不同的 σ t \sigma_t σt值会导致不同的生成过程。当所有 t t t的 σ t = 0 \sigma_t=0 σt=0时,前向过程在给定 x t − 1 \mathbf x_{t-1} xt−1和 x 0 \mathbf x_0 x0时变得确定性,除了 t = 1 t=1 t=1;在生成过程中,随机噪声 ϵ t \epsilon_t ϵt前的系数变为零。 α t \alpha_t αt是信号率,等于公式(1)中提到的 1 − β t 1 - \beta_t 1−βt。
4. 实验过程
4.1 实验细节
· 数据集:
在nuScenes数据集上验证DiffMap。nuScenes数据集包含1000个场景的多视角图像和点云,其中700个场景用于训练,150个用于验证,150个用于测试。nuScenes数据集还包含注释的高清地图语义标签。
· 架构:
使用ResNet-101作为相机分支的主干网络,使用PointPillars作为模型的LiDAR分支主干网络。基线模型中的分割头是基于ResNet-18的FCN网络。对于自编码器,采用VQVAE,该模型在nuScenes分割地图数据集上进行了预训练,以提取地图特征并将地图压缩为基本潜在空间。最后使用UNet来构建扩散网络。
· 训练细节:
使用AdamW优化器训练VQVAE模型30个epoch。使用的学习率调度器是LambdaLR,它以指数衰减模式逐渐降低学习率,衰减因子为0.95。初始学习率设置为,批量大小为8。然后,使用AdamW优化器从头开始训练扩散模型30个epoch,初始学习率为2e-4。采用MultiStepLR调度器,该调度器根据指定的里程碑时间点(0.7、0.9、1.0)和在不同训练阶段的缩放因子1/3来调整学习率。最后将BEV分割结果设置为0.15m的分辨率,并将LiDAR点云体素化。HDMapNet的检测范围为[-30m,30m]×[-15m,15m]m,因此相应的BEV地图大小为400×200,而Superfusion使用[0m,90m]×[-15m,15m]并得到600×200的结果。由于LDM的维度约束(在VAE和UNet中下采样8倍),需要将语义地面实况地图的大小填充到64的倍数。
· 推理细节:
通过在当前BEV特征条件下对噪声地图执行去噪过程20次来获得预测结果。使用3次采样的平均值作为最终的预测结果。
4.2 评估指标
主要针对地图语义分割和实例检测任务进行平评估。且主要集中在三个静态地图元素上:车道边界、车道分隔线和行人横道。
· 语义指标:
使用IoU(交并比)作为预测HD地图M1和地面真值HD地图M2之间的欧拉指标,公式如下:
I o U ( M 1 , M 2 ) = M 1 ∩ M 2 M 1 ∪ M 2 ( 11 ) IoU(M_1, M_2) = \frac{M_1 \cap M_2 }{ M_1 \cup M_2}\qquad(11) IoU(M1,M2)=M1∪M2M1∩M2(11)
· 实例指标:
使用Chamfer距离(CD)评估预测曲线和地面真值曲线之间的空间距离。
C D d i r ( C 1 , C 2 ) = 1 C 1 ∑ x ∈ C 1 min y ∈ C 2 ∥ x − y ∥ 2 ( 12 ) CD_{dir}(C_1,C_2) = \frac{1}{C_1}\sum\limits_{x \in C_1} \min\limits_{y \in C_2} \parallel x - y \parallel_2(12) CDdir(C1,C2)=C11x∈C1∑y∈C2min∥x−y∥2(12)
其中C1和C2是预测曲线和地面真值曲线上的点集。典型的Chamfer距离是双向的,预测曲线和地面真值曲线之间的CD计算如下:
C D = C D p r e d + C D g t = C D d i r ( C 1 , C 2 ) + C D d i r ( C 2 , C 1 ) ( 13 ) CD = CD_{pred} + CD_{gt} = CD_{dir}(C_1,C_2) + CD_{dir}(C_2,C_1)\qquad(13) CD=CDpred+CDgt=CDdir(C1,C2)+CDdir(C2,C1)(13)
然后使用AP(平均精度)来衡量实例检测距离,定义如下:
A P = 1 10 ∑ r ∈ 0.1 , 0.2 , ⋯ , 1.0 A P r ( 14 ) AP = \frac{1}{10} \sum\limits_{r \in 0.1,0.2,\cdots,1.0} AP_{r}\qquad(14) AP=101r∈0.1,0.2,⋯,1.0∑APr(14)
其中 A P r AP_r APr是召回率为 r r r时的精度。同时,使用CD和IoU来选择真阳性实例。只有当IoU高于一定阈值且CD低于另一个阈值时,该实例才被视为真阳性。实验中IoU阈值设为0.1,CD阈值设为1.0米。
· 多区间评估:
为了更好地探索 DiffMap 在远程检测方面的有效性,将地面真值进一步划分为三个区间:0-30 米、30-60 米和 60-90 米,以公平地与 SuperFusion 进行比较。随后,在这三个区间内,计算不同方法的 IoU、CD 和 AP,旨在全面评估检测结果。
4.3 评估结果
表1显示了语义地图分割的 IoU 得分比较。DiffMap 在所有区间都显示出显著的改善,尤其在车道分隔线和行人横道上取得了最佳结果。

表1|IoU得分比较©️【深蓝AI】编译
如表2所示,DiffMap方法在平均精度(AP)方面也有显著提升,验证了 DiffMap 的有效性。

表2|MAP得分比较©️【深蓝AI】编译
如表3所示,将DiffMap范式集成到HDMapNet中时,可以观察到,无论是仅使用摄像头还是摄像头-激光雷达融合方法,DiffMap都能提高HDMapNet的性能。这说明DiffMap方法在各类分割任务上都很有效,包括远距离和近距离检测。然而对于边界,DiffMap的表现并不出色,这是因为边界的形状结构不固定,存在许多难以预测的扭曲,从而使捕捉先验结构特征变得困难。

表3|定量分析结果©️【深蓝AI】编译
4.4 消融实验
表4显示了VQVAE中不同下采样因子对检测结果的影响。通过分析DiffMap在下采样因子为4、8、16时的行为可以看到,当下采样因子设置为8x时,结果最佳。

表4|消融实验结果©️【深蓝AI】编译
此外,作者还测量了删除与实例相关的预测模块对模型的影响,如表5所示。实验表明,添加此预测进一步提高了IOU。

表5|消融实验结果(是否包含预测模块)©️【深蓝AI】编译
4.5 可视化
图4展示了DiffMap和基线(HDMapNet-fusion)在复杂场景中的比较。很明显,基线的分割结果忽略了元素内部的形状属性和一致性。相比之下,DiffMap展示了能够纠正这些问题的能力,产生与地图规范很好对齐的分割输出。具体而言,在案例(a)、(b)、(d)、(e)、(h)和(l)中,DiffMap有效地纠正了不准确预测的人行横道。在案例(c)、(d)、(h)、(i)、(j)和(l)中,DiffMap完成或删除了不准确的边界,使结果更接近于现实的边界几何。此外,在案例(b)、(f)、(g)、(h)、(k)和(l)中,DiffMap解决了分隔线断裂的问题,确保了相邻元素的平行性。

图4|定性分析结果©️【深蓝AI】编译
5. 总结展望
在本文中,作者设计的DiffMap网络是一种利用潜在扩散模型学习地图结构先验的新方法,从而增强了传统的地图分割模型。该方法可以作为任何地图分割模型的辅助工具,其预测结果在远近距离检测场景中都有显著改善。由于该方法具有很强的扩展性,适合研究其他类型的先验信息,例如可以将SD地图先验集成到DiffMap的第二模块中,从增强其性能表现。将来有望在矢量化地图构建中继续有所进步。
编译|巴巴塔
审核|Los
移步公众号【深蓝AI】,第一时间获取自动驾驶、人工智能与机器人行业最新最前沿论文和科技动态。
相关文章:
DiffMap:首个利用LDM来增强高精地图构建的网络
论文标题: DiffMap: Enhancing Map Segmentation with Map Prior Using Diffusion Model 论文作者: Peijin Jia, Tuopu Wen, Ziang Luo, Mengmeng Yang, Kun Jiang, Zhiquan Lei, Xuewei Tang, Ziyuan Liu, Le Cui, Kehua Sheng, Bo Zhang, Diange Ya…...

ComfyUI简单介绍
🍓什么是ComfyUI ComfyUI是一个为Stable Diffusion专门设计的基于节点的图形用户界面,可以通过各种不同的节点快速搭建自己的绘图工作流程。 软件打开之后是长这个样子: 同时软件本身是github上的一个开源项目,开源地址为&#…...

【内存泄漏Bug】animation未释放
问题描述 一个页面做了动画特效,这个页面有可能跳转到其他页面,并长时间不返回,该页面此时已经不活跃了,该页面的对象为无用对象,存在内存泄漏风险 问题分析 这个activity的特性是 1. 有可能跳转到其他页面 2. 有可…...
《异常检测——从经典算法到深度学习》28 UNRAVEL ANOMALIES:基于周期与趋势分解的时间序列异常检测端到端方法
《异常检测——从经典算法到深度学习》 0 概论1 基于隔离森林的异常检测算法 2 基于LOF的异常检测算法3 基于One-Class SVM的异常检测算法4 基于高斯概率密度异常检测算法5 Opprentice——异常检测经典算法最终篇6 基于重构概率的 VAE 异常检测7 基于条件VAE异常检测8 Donut: …...

Python正则模块re方法介绍
Python 的 re 模块提供了多种方法来处理正则表达式。以下是一些常用的方法及其功能介绍: 1. re.match() 在字符串的开始位置进行匹配。 import repattern r\d string "123abc456"match re.match(pattern, string) if match:print(f"匹配的字符…...

pdf使用pdfbox切割pdf文件MultipartFile
引入依赖: <dependency><groupId>org.apache.pdfbox</groupId><artifactId>pdfbox</artifactId><version>2.0.25</version></dependency>测试代码: import io.choerodon.core.iam.ResourceLevel; impo…...

力扣HOT100 - 31. 下一个排列
解题思路: 数字是逐步增大的 步骤如下: class Solution {public void nextPermutation(int[] nums) {int i nums.length - 2;while (i > 0 && nums[i] > nums[i 1]) i--;if (i > 0) {int j nums.length - 1;while (j > 0 &&…...
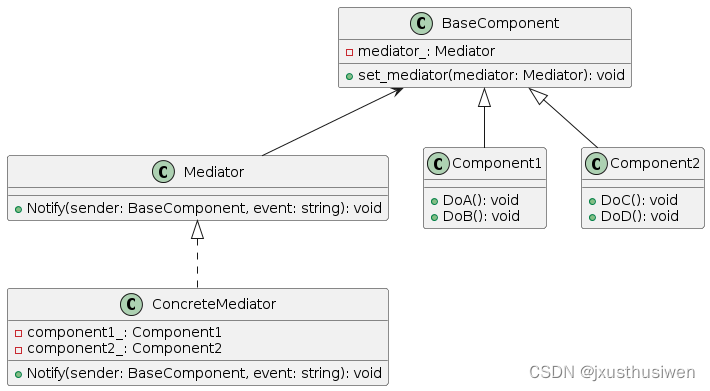
设计模式 20 中介者模式 Mediator Pattern
设计模式 20 中介者模式 Mediator Pattern 1.定义 中介者模式(Mediator Pattern)是一种行为型设计模式,它通过封装对象之间的交互,促进对象之间的解耦合。中介者模式的核心思想是引入一个中介者对象,将系统中对象之间…...

在 C++ 中,p->name 和 p.name 的效果并不相同。它们用于不同的情况,取决于你是否通过指针访问结构体成员。
p->name:这是指针访问运算符(箭头运算符)。当 p 是一个指向结构体的指针时,用 p->name 来访问结构体的成员。 student* p &stu; // p 是一个指向 student 类型的指针 cout << p->name << endl; // 通过…...

C++基础:多态
多态相关 多态继承重写父类的虚函数多态的体现,父类的引用指向子类对象的空间虚函数可以实现,也可以不实现,不实现必须要有初始值存在未定义的虚函数的类为抽象类.抽象类不能实例化对象;(animal父类不能实例化对象)如果父类中的函数非虚函数,则会调用父类中的函数//多态的体现…...
)
移除元素(算法题)
文章目录 移除元素解题思路 移除元素 给你一个数组 nums 和一个值 val,你需要原地移除所有数值等于 val 的元素,并返回移除后数组的新长度。 不要使用额外的数组空间,你必须仅使用 O(1) 额外空间并原地修改输入数组。 元素的顺序可以改变。…...
电商场景的视频动效
AtomoVideo:AIGC赋能下的电商视频动效生成本文分享阿里妈妈视频 AIGC(AtomoVideo等) 赋能视频广告创意的探索和实践。通过基于扩散模型的视频生成技术,结合可控生成技术,使静态电商图片能够栩栩如生地“动”起来,实现了在电商领域的视频 AIGC 应用落地。https://mp.weixi…...

Windows操作系统基本知识整理
目录 引言 一、Windows操作系统的发展历史 1.1 Windows 1.0到Windows 3.0 1.2 Windows 95到Windows Me 1.3 Windows NT到Windows 2000 1.4 Windows XP到Windows 7 1.5 Windows 8到Windows 10 二、Windows操作系统的核心组件 2.1 内核 2.2 文件系统 2.3 图形用户界面&…...

Vue 状态管理深入研究:Vuex 和 Pinia 的原理与实践对比
推荐一个AI网站,免费使用豆包AI模型,快去白嫖👉海鲸AI 👋 引言 在 Vue.js 应用程序中,状态管理是一个至关重要的方面。它有助于集中管理应用的状态,使组件之间的数据共享更加高效和可维护。Vuex 和 Pinia …...

【三数之和】python,排序+双指针
暴力搜索3次方的时间复杂度,大抵超时 遇到不会先排序 排序双指针 上题解 照做 class Solution:def threeSum(self, nums: List[int]) -> List[List[int]]:res[]nlen(nums)#排序降低复杂度nums.sort()k0#留两个位置给双指针i,jfor k in range(n-2):if nums[k]…...
)
TCP通信实现(服务端与客户端)
TCP通信实现(服务器端) 案例 // TCP 通信的服务器端#include <stdio.h> #include <arpa/inet.h> #include <unistd.h> #include <string.h> #include <stdlib.h>int main() {// 1.创建socket(用于监听的套接字)int lfd socket(AF_…...

安装appium自动化测试环境,我自己的版本信息
教程来自:Appium原理与安装 - 白月黑羽 我的软件的版本: 安装是选择为自己安装而不是选all user pip install appium-python-client命令在项目根目录下安装appium-python-client sdk的话最简单的安装方式就是去Android官网下一个android studio然后在…...

【讲解下Web前端三大主流的框架】
🎥博主:程序员不想YY啊 💫CSDN优质创作者,CSDN实力新星,CSDN博客专家 🤗点赞🎈收藏⭐再看💫养成习惯 ✨希望本文对您有所裨益,如有不足之处,欢迎在评论区提出…...
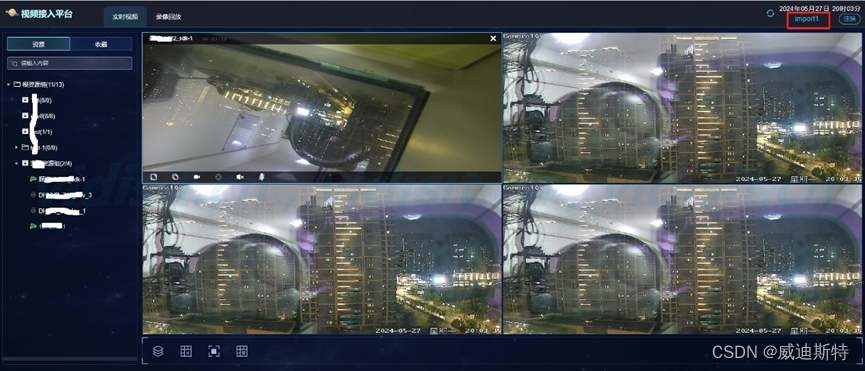
视频监控平台AS-V1000产品介绍:账户或用户数据的导入和导出功能介绍
目录 一、功能描述 (一)导入功能定义 (二)导出功能定义 二、用户数据的导入导出的作用 三、AS-V1000新版本的导出和导入功能介绍 (一)功能主界面 (二)导出功能 1、导出操作 …...
markdown画时序图的时候,如何自动显示每一条时序的序号
1: 现象描述 今天画时序图的时候,发现时序上面没有显示序号,看起来不够清晰,只有单纯的说明; 如下图所示 刚测试CSDN的时序图,默认是带序号的,看起来和实际使用的markdown工具有关系; 2:解决办…...

8051开发中禁用自动代码分区的实践指南
1. 禁用自动代码分区的技术背景在8051架构的嵌入式开发中,代码分区(Bank Switching)是一种扩展程序存储器空间的常用技术。传统8051芯片的寻址空间有限,通过分区切换机制可以将代码分布到不同的物理存储区域。Keil C51开发工具链默…...

# 软考软件设计师 · 考前2天轻松复习与终极必背手册
软考软件设计师 考前2天轻松复习与终极必背手册📅 2026年5月21日 | 距考试仅剩2天 | D-2 轻松复习日 ⚠️ 今天的核心任务:翻看错题本 快速过一遍速记口诀 确认考场路线 心态放松 ❌ 不要学新内容!不要做难题!今天的任务只有一…...

AI与PDCA循环融合:构建韧性医院物流系统的实践指南
1. 项目概述:当医院物流遇上AI与PDCA在医院这个庞大而精密的系统里,物流的顺畅与否,直接关系到患者的生命安全和医疗服务的质量。想象一下,一台急诊手术因为某个关键耗材在仓库里“迷路”而推迟,或者一个重症病房因为药…...

Vibe Coding工程化:从“感觉编程“到可落地的AI开发范式
一个需要正视的现象 2026年,“Vibe Coding"已经不是一个新鲜词汇。Andrej Karpathy在2025年提出这个概念时,描述的是一种完全依赖AI的编程体验:你描述意图,模型生成代码,你甚至不需要真正"读懂"代码就能…...
一个都不能少)
CentOS7最小化安装后,这3个必做的配置(换源、设静态IP、更新)一个都不能少
CentOS7最小化安装后的三大关键配置实战指南刚完成CentOS 7最小化安装的系统就像毛坯房——虽然基础框架已经就位,但距离真正"拎包入住"还有一段距离。作为运维人员,我们最迫切的需求是快速搭建一个稳定、高效的基础服务器环境。本文将聚焦三个…...

五轴联动机床:什么叫真正做出来了,什么叫组装贴牌
机床厂的数量从来不是问题。打开任何一份机床企业名录,数以千计的厂商密密麻麻排在那里,官网上都写着"五轴联动"“高精度数控”“航空级加工”。但做五轴联动整机与自主数控系统的工厂,放到整个行业里只是极小的一部分;…...

如何重塑贴吧体验:贴吧Lite带来的极致纯净浏览革新
如何重塑贴吧体验:贴吧Lite带来的极致纯净浏览革新 【免费下载链接】TiebaLite 贴吧 Lite 项目地址: https://gitcode.com/gh_mirrors/tieb/TiebaLite 厌倦了官方贴吧应用的臃肿体验和无处不在的广告干扰?贴吧Lite作为一款革命性的第三方贴吧客户…...

SQL 能包打天下吗?多少比例的产品只需 SQL,何时需要引入其他存储?
引言 在数据驱动的时代,SQL(结构化查询语言)作为关系型数据库的标准查询语言,其地位无可撼动。它以其强大的数据操作能力、清晰的声明式语法和广泛的生态支持,成为绝大多数应用开发者的首选。然而,随着业务场景的日益复杂和数据形态的多样化,一个灵魂拷问随之而来:SQL…...

宏裕塑胶高性能RTP导电塑料,打造卓越导电材料新标杆
导读:在高端制造领域,导电塑料的性能直接决定产品的可靠性与竞争力。宏裕塑胶高性能RTP导电塑料,通过整合美国RTP公司尖端技术,正在重新定义行业标准,为电子、汽车、医疗等领域提供稳定高效的解决方案。宏裕塑胶高性能…...

水壶装箱检测怎么做?一个独立开发者的实战经验
水壶装箱检测怎么做?一个独立开发者的实战经验 作者:馒头 | 离散型智能制造项目经理 MES开发2年 项目经理3年,主导过电子、机械行业的百万级MES项目。 独立开发过一套装箱检测系统,从需求分析到上线落地全程主导。 踩过的坑、走过…...