Petalinux 制作ZYNQ镜像文件流程
1概述
在Zynq-7000 SoC中搭建运行Linux,嵌入式软件栈。

处理器系统引导是一个分两个阶段的过程。第一个阶段是一个内部 BootROM,它存储
stage-0 的引导代码。BootROM 在 CPU 0 上执行,CPU 1 执行等待事件(WFE)指令。
BootROM 还配置必要的外围设备,以开始从其中一个引导设备获取第一阶段引导加载程序
(FSBL)引导代码。可编程逻辑(PL)不是由 BootROM配置的。第二种状态是 FSBL 引导
代码。这通常存储在闪存、SD卡中,或者可以通过JTAG下载。BootROM代码将FSBL引导
代码从选定的非易失性存储器复制到片上存储器(OCM)。加载到OCM中的FSBL的大小限
制为192KB。在FSBL开始执行后,完整的256 KB可用。有一个可选的第二阶段引导加载程
序,它是可选的,由用户设计。常见的第二阶段引导加载程序是U-boot。
(1) FSBL
Zynq-7000 的第一阶段引导加载程序(FSBL)使用硬件比特流(如果存在)配置 FPGA,
并将操作系统(OS)映像或第二阶段引导加载器映像从非易失性存储器
(NAND/SD/eMC/QSPI)加载到存储器(DDR/OCM)。它支持多个分区,每个分区可以是
代码映像、位流或通用数据。如果需要,可以对这些分区中的每个分区进行身份验证和/或解
密。
(2) U-Boot
U-Boot,通用引导加载程序的缩写,是一种开源的主引导加载程序,用于嵌入式设备,
以引导Linux社区中经常使用的设备操作系统内核。Xilinx在Zynq-7000设备中使用U-Boot作
为第二阶段引导加载程序。
(3) Linux
Linux,全称 GNU/Linux,是一种免费使用和自由传播的类 UNIX操作系统,是我们本开
发指南的重点。
以上就简单的介绍了Zynq-7000嵌入式软件栈,如果没有看懂没关系,笔者这里简单的概
括下。Zynq-7000上电后,首先由BootROM对Zynq设备进行初始启动,然后引导加载fsbl到OCM并启动fsbl;fsbl启动后将uboot加载到DDR并启动uboot;uboot启动后加载linux系统
镜像到DDR并启动linux,至此整个linux系统启动完成。
2 Petalinux 工具的设计流程概述
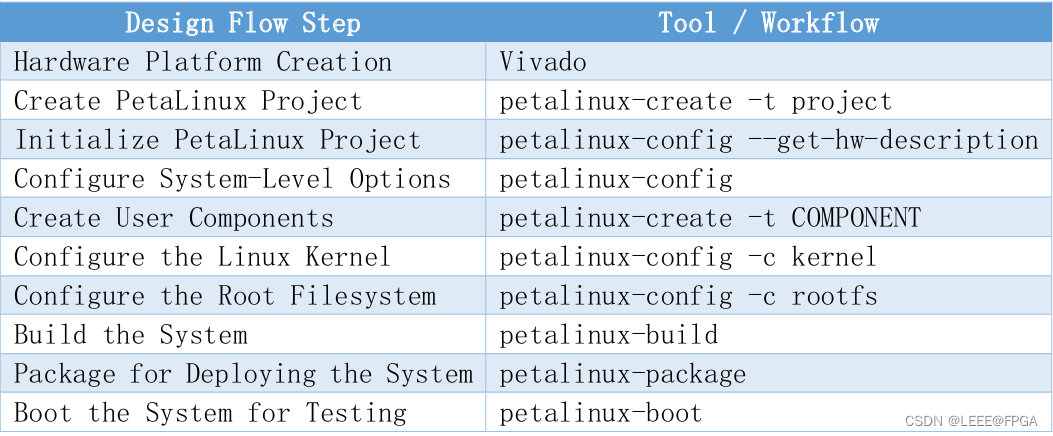
需要说明的是以上设计流程不是按部就班的每一步都执行一遍,可以根据使用场景有选
择的执行。一般的设计流程如下:
1. 通过Vivado创建硬件平台,得到xsa文件;
2. 运行 source <petalinux 安装路径>/settings.sh,设置 Petalinux 运行环境
source /opt/pkg/petalinux/2020.2/settings.sh
#或者
sptl 3. 通过petalinux-create -t project 创建 petalinux 工程;
petalinux-create -t project --template zynq -n AZYNQ5. 使用 petalinux-config --get-hw-description,将 xsa 文件导入到 petalinux 工程当中并配置
petalinux 工程; cd AZYNQ
petalinux-config --get-hw-description ../6. 使用petalinux-config -c kernel 配置 Linux 内核;
7. 使用petalinux-config -c rootfs 配置 Linux 根文件系统;
8. 配置设备树文件;
vi project-spec/meta-user/recipes-bsp/device-tree/files/system-user.dtsi #include <dt-bindings/gpio/gpio.h>
#include <dt-bindings/input/input.h>
#include <dt-bindings/media/xilinx-vip.h>
#include <dt-bindings/phy/phy.h>/ {model = "Alientek Navigator Zynq Development Board";compatible = "xlnx,zynq-zc702", "xlnx,zynq-7000";leds {compatible = "gpio-leds";gpio-led1 {label = "led2";gpios = <&gpio0 0 GPIO_ACTIVE_HIGH>;default-state = "on";};gpio-led2 {label = "led1";gpios = <&gpio0 54 GPIO_ACTIVE_HIGH>;linux,default-trigger = "heartbeat";};gpio-led3 {label = "pl_led0";gpios = <&axi_gpio_0 0 0 GPIO_ACTIVE_HIGH>;default-state = "on";};gpio-led4 {label = "pl_led1";gpios = <&axi_gpio_0 1 0 GPIO_ACTIVE_HIGH>;linux,default-trigger = "timer";};gpio-led5 {label = "ps_led0";gpios = <&gpio0 7 GPIO_ACTIVE_HIGH>;default-state = "on";};gpio-led6 {label = "ps_led1";gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;linux,default-trigger = "timer";};};keys {compatible = "gpio-keys";autorepeat;gpio-key1 {label = "pl_key0";gpios = <&gpio0 55 GPIO_ACTIVE_LOW>;linux,code = <KEY_LEFT>;gpio-key,wakeup;autorepeat;};gpio-key2 {label = "pl_key1";gpios = <&gpio0 56 GPIO_ACTIVE_LOW>;linux,code = <KEY_RIGHT>;gpio-key,wakeup;autorepeat;};gpio-key3 {label = "ps_key1";gpios = <&gpio0 12 GPIO_ACTIVE_LOW>;linux,code = <KEY_UP>;gpio-key,wakeup;autorepeat;};gpio-key4 {label = "ps_key2";gpios = <&gpio0 11 GPIO_ACTIVE_LOW>;linux,code = <KEY_DOWN>;gpio-key,wakeup;autorepeat;};touch-key {label = "touch_key";gpios = <&gpio0 57 GPIO_ACTIVE_HIGH>;linux,code = <KEY_ENTER>;gpio-key,wakeup;autorepeat;};};beep {compatible = "gpio-beeper";gpios = <&gpio0 58 GPIO_ACTIVE_HIGH>;};usb_phy0: phy0@e0002000 {compatible = "ulpi-phy";#phy-cells = <0>;reg = <0xe0002000 0x1000>;view-port = <0x0170>;drv-vbus;};
};&uart0 {u-boot,dm-pre-reloc;status = "okay";
};&sdhci0 {u-boot,dm-pre-reloc;status = "okay";
};&usb0 {dr_mode = "otg";usb-phy = <&usb_phy0>;
};&qspi {u-boot,dm-pre-reloc;flash@0 { /* 16 MB */compatible = "w25q256", "jedec,spi-nor";reg = <0x0>;spi-max-frequency = <50000000>;#address-cells = <1>;#size-cells = <1>;partition@0x00000000 {label = "boot";reg = <0x00000000 0x00100000>;};partition@0x00100000 {label = "bootenv";reg = <0x00100000 0x00020000>;};partition@0x00120000 {label = "bitstream";reg = <0x00120000 0x00400000>;};partition@0x00520000 {label = "device-tree";reg = <0x00520000 0x00020000>;};partition@0x00540000 {label = "kernel";reg = <0x00540000 0x00500000>;};partition@0x00A40000 {label = "space";reg = <0x00A40000 0x00000000>;};};
};&gem0 {local-mac-address = [00 0a 35 00 8b 87];phy-handle = <ðernet_phy>;ethernet_phy: ethernet-phy@7 { /* yt8521 */reg = <0x7>;device_type = "ethernet-phy";};
};&gem1 {local-mac-address = [00 0a 35 00 11 55];phy-reset-gpio = <&gpio0 63 GPIO_ACTIVE_LOW>;phy-reset-active-low;phy-handle = <&pl_phy>;pl_phy: pl_phy@4 { reg = <0x4>;device_type = "ethernet-phy";};
};&watchdog0 {status = "okay";reset-on-timeout; // Enable watchdog reset function
};&adc {status = "okay";xlnx,channels {#address-cells = <1>;#size-cells = <0>;channel@0 {reg = <0>;};};
};&i2c0 {clock-frequency = <100000>;eeprom@50 {compatible = "atmel,24c64";reg = <0x50>;pagesize = <32>;};rtc@51 {compatible = "nxp,pcf8563";reg = <0x51>;};
};10. 使用petalinux-build 编译整个工程;
petalinux-build11. 使用petalinux-package --boot制作 BOOT.BIN启动文件;
petalinux-package --boot --fsbl --fpga --u-boot --force13. 制作SD启动卡,将BOOT.BIN和image.ub以及根文件系统部署到SD卡中;
14. 将SD卡插入开发板,并将开发板启动模式设置为从SD卡启动;
15. 开发板连接串口线并上电启动,串口上位机打印启动信息,登录进入Linux系统。
相关文章:
Petalinux 制作ZYNQ镜像文件流程
1概述 在Zynq-7000 SoC中搭建运行Linux,嵌入式软件栈。 处理器系统引导是一个分两个阶段的过程。第一个阶段是一个内部 BootROM,它存储 stage-0 的引导代码。BootROM 在 CPU 0 上执行,CPU 1 执行等待事件(WFE)指令。…...

99%的人都不知道,微信才是真正的学习神器
微信,作为一款全球最受欢迎的社交应用之一,除了聊天、朋友圈、小程序等功能外,还有许多隐藏的学习功能,今天小编就给大家分享10个微信隐藏的学习功能,助您轻松成为学霸。 1、微信笔记 用过代办清单软件的朋友都知道&…...
加速模型训练 GPU cudnn
GPU的使用 在定义模型时,如果没有特定的GPU设置,会使用 torch.nn.DataParallel 将模型并行化,充分利用多GPU的性能,这在加速训练上有显著影响。 model torch.nn.DataParallel(model).cuda() cudnn 的配置: cudnn.…...
《python编程从入门到实践》day40
# 昨日知识点回顾 编辑条目及创建用户账户 暂没能解决bug: The view learning_logs.views.edit_entry didnt return an HttpResponse object. It returned None instead.# 今日知识点学习 19.2.5 注销 提供让用户注销的途径 1.在base.html中添加注销链接 …...

IO多路复用学习笔记
参考资料: 视频1 视频2(本人B站也有发布) 视频3 参考笔记 参考博客...

Ubuntu设置中文输入法教程
在Ubuntu中设置中文输入法非常简单,只需按照以下步骤操作即可。 打开“设置”菜单。在Ubuntu的左上角点击“活动”按钮,然后在弹出的菜单中选择“设置”图标。 进入“区域和语言”设置。在设置菜单中,找到并点击“区域和语言”选项。 添加中…...
)
机器学习之爬山算法(Hill Climbing Algorithm)
爬山算法(Hill Climbing Algorithm)是一种简单而常见的启发式搜索算法,通常用于解决优化问题。它的基本思想类似于登山过程中爬升到山顶的过程,即从一个起始点开始,不断尝试向邻近的点移动,直到找到一个局部最优解。 下面是爬山算法的基本工作流程: 初始化:选择一个初…...

LeetCode - 贪心算法 (Greedy Algorithm) 集合 [分配问题、区间问题]
欢迎关注我的CSDN:https://spike.blog.csdn.net/ 本文地址:https://spike.blog.csdn.net/article/details/139242199 贪心算法,是在每一步选择中,都采取当前状态下,最好或最优(即最有利)的选择&…...
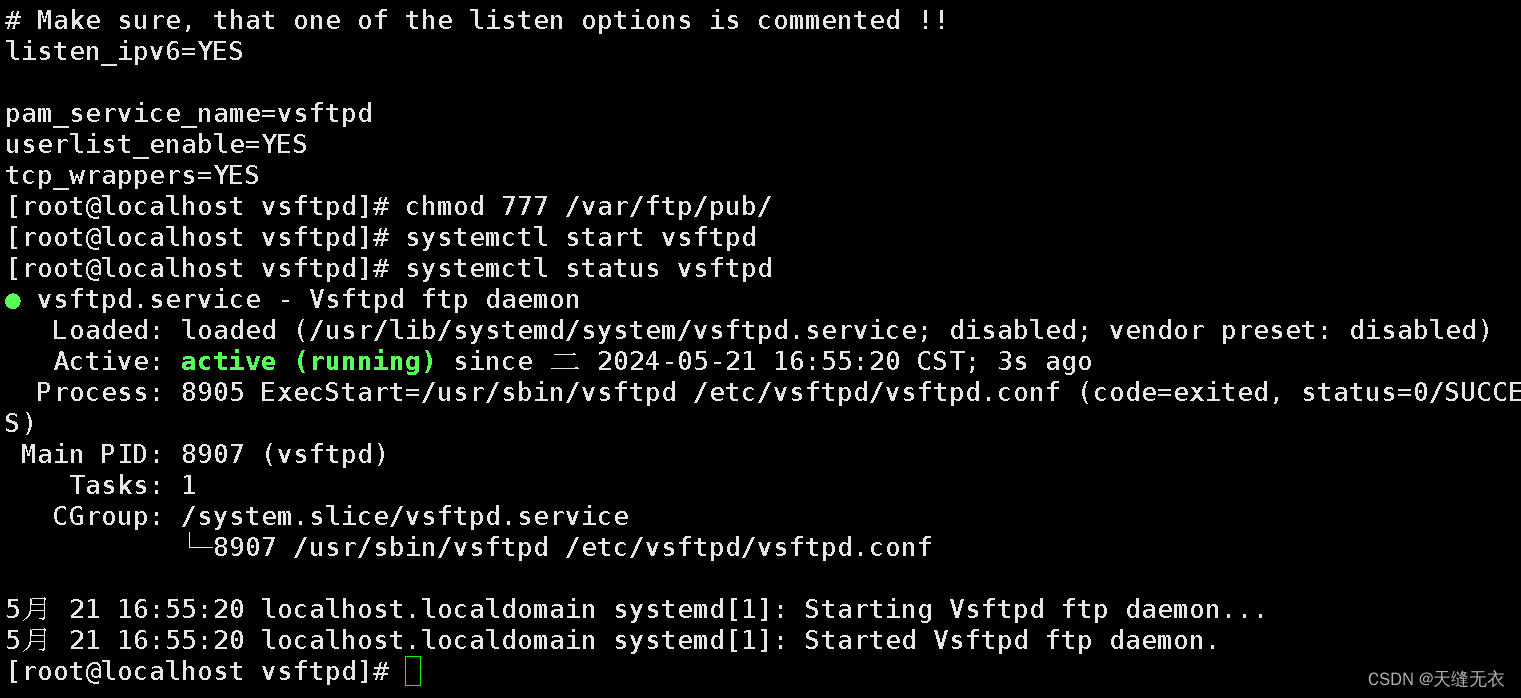
Linux中ftp配置
一、ftp协议 1、端口 ftp默认使用20、21端口 20端口用于建立数据连接 21端口用于建立控制连接 2、ftp数据连接模式 主动模式:服务器主动发起数据连接 被动模式:服务器被动等待数据连接 二、ftp安装 yum install -y vsftpd #---下…...

BWVS 靶场测试
一、PHP弱类型 is_numeric() 输入:127.0.0.1/BWVS/bug/php/code.php # 1、源代码分析 如果num不是数字,那么就输出num,同时如果num1,就输出flag。即num要是字符串又要是数字 # 2、函数分析: is_numeric()函数&…...
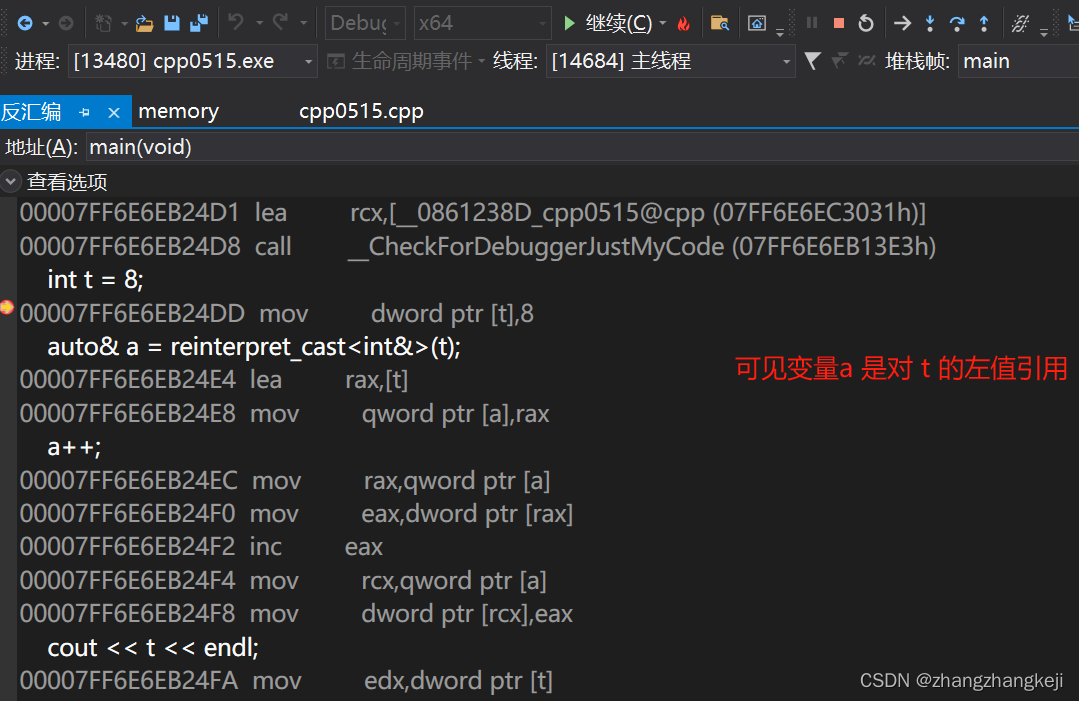
c++ 里重解释转换之于引用 reinterpret_cast< long >
今天遇到了这一很新奇的写法。模糊中记得王老师也这么讲过。c 里四大转换。把数据重解释为原来数据的引用。虽然也可以直接定义对变量的引用。测试如下: 咱们从反汇编再了解下 c 编译器是怎么处理这种写法的: 谢谢...
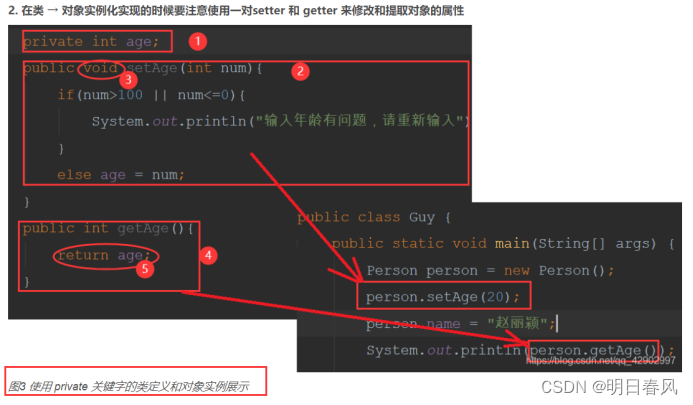
JAVASE2
封装的步骤: 1、所有属性私有化,使用private关键字进行修饰,private表示私有的,修饰的所有数据只能在本类中访问 2、对外提供简单入口:比如说被private修饰的成员变量,在其他类中只能通过getXxx/setXxx方法…...

ora-00392 ora-00312错误处理
检查当前日志组状态 对日志组进行clear操作 重新开库无报错...

网页、h5默认滚动条样式重构
文章目录 前言一、使用步骤1、在想要滚动的元素上设置相应的css类名2.设置样式 总结 前言 此文章用于,让我自己快速设置 浏览器、h5 默认滚动条样式…… 一、使用步骤 1、在想要滚动的元素上设置相应的css类名 代码如下: <div class"list scro…...

香橙派AIpro测评上手指南
一、前言 首先非常荣幸受到邀请参加本次香橙派开发板的测评活动,除了令人眼前一亮,做工非常精细的开发板,举办方还非常贴心地准备了散热套件,以及烧录好系统的TF卡,甚至准备了电源适配器,数据线࿱…...

GBDT 算法【python,机器学习,算法】
GBDT 即 Gradient Boosting Decision Tree 梯度提升树, 是一种迭代的决策树算法,又叫 MART(Multiple Additive Regression Tree), 它通过构造一组弱的学习器(树),然后把多棵决策树的结果累加起来作为最终的预测输出。该算法将决策…...
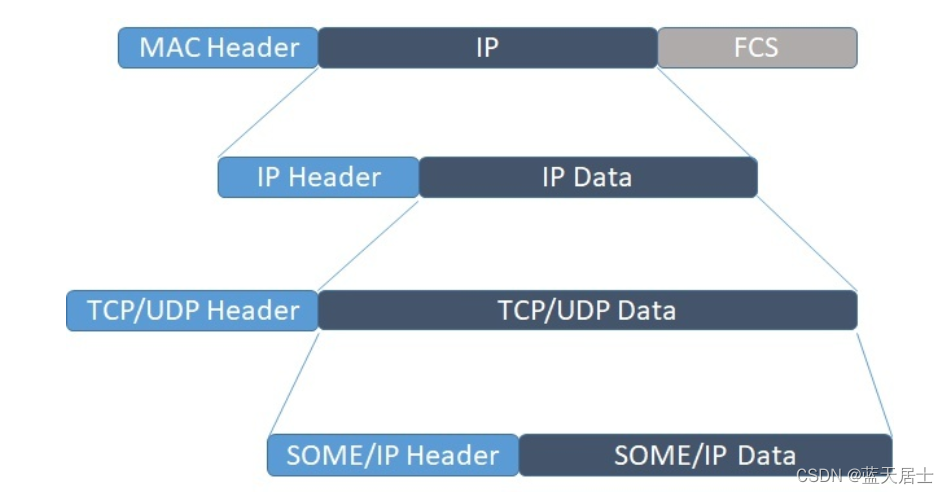
软考 系统架构设计师系列知识点之SOME/IP与DDS(3)
接前一篇文章:软考 系统架构设计师系列知识点之SOME/IP与DDS(2) 本文内容参考: 车载以太网 - SOME/IP简介_someip-CSDN博客 https://zhuanlan.zhihu.com/p/369422441 什么是SOME/IP?_someip-CSDN博客 SOME/IP 详解系列&#…...
将AI大模型装进你的手机,你愿意么?
大数据产业创新服务媒体 ——聚焦数据 改变商业 AI大模型的发展,有两个方向,一个是模型越做越大,以规模来提升性能。还有一个重要的方向,就是通过将模型做小,来嵌入手机、电脑等计算终端,这同样是值得关注…...

前端面试题12-22
12 Proxy是什么,有什么作用? Proxy 是 ES6 (ECMAScript 2015) 引入的一种元编程特性。它允许你创建一个对象,该对象可以拦截和定义基本操作(例如属性查找、赋值、枚举、函数调用等)。Proxy 提供了一种机制,…...

【论文解读】Performance of AV1 Real-Time Mode
论文下载地址:Performance of AV1 Real-Time Mode 时间:2020.10 级别:IEEE 作者:Ludovic Roux 摘要 背景:COVID-19疫情增加了对数字互动的需求,使得实时或低延迟编解码器变得更加重要。现状:大多数编解码器,包括AV1,主要关注于编码效率,这是视频点播(VOD)的主要改…...

Rescuezilla:3步轻松搞定系统备份与恢复的瑞士军刀
Rescuezilla:3步轻松搞定系统备份与恢复的瑞士军刀 【免费下载链接】rescuezilla The Swiss Army Knife of System Recovery 项目地址: https://gitcode.com/gh_mirrors/re/rescuezilla 当你面对电脑系统崩溃、硬盘损坏或数据丢失的紧急情况时,是…...

ABAP云迁移中SAML Bearer断言实战指南
1. 这不是“配置一下就能用”的流程——SAML Bearer Assertion 在 ABAP 云迁移中到底在替谁干活?你刚接手一个 SAP S/4HANA Cloud 扩展项目,客户要求“把本地 ABAP 系统里的用户身份,安全地透传到新上线的 Node.js 微服务里”。运维同事甩来一…...

如何完整破解Cursor Pro限制:终极免费激活方案全解析
如何完整破解Cursor Pro限制:终极免费激活方案全解析 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your tria…...

Windows 11系统优化终极方案:用Win11Debloat免费提升电脑性能
Windows 11系统优化终极方案:用Win11Debloat免费提升电脑性能 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter…...

百度文库纯净打印助手:3步实现无广告文档导出
百度文库纯净打印助手:3步实现无广告文档导出 【免费下载链接】baidu-wenku fetch the document for free 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wenku 百度文库纯净打印助手是一个开源JavaScript脚本,专为解决百度文库文档阅读和保…...
)
别再手动刷权重了!用Maya的ADV插件,30分钟搞定角色身体绑定(附减模包裹技巧)
别再手动刷权重了!用Maya的ADV插件30分钟完成角色身体绑定 角色绑定一直是三维动画制作中的痛点环节。记得刚入行时,我曾为一个穿着皮夹克的游戏角色手动刷权重整整两天,结果肘部变形依然不自然。直到接触ADV插件的减模包裹功能,…...

QMCDecode:3步解锁QQ音乐加密音频的终极macOS工具
QMCDecode:3步解锁QQ音乐加密音频的终极macOS工具 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目录,默认转换结…...

如何快速解锁百度网盘资源:baidupankey智能查询工具终极指南
如何快速解锁百度网盘资源:baidupankey智能查询工具终极指南 【免费下载链接】baidupankey 项目地址: https://gitcode.com/gh_mirrors/ba/baidupankey 还在为百度网盘分享链接的提取码而烦恼吗?每次遇到需要提取码的资源,都要在多个…...

中兴光猫工厂模式解锁神器:zteOnu让你的网络管理权限瞬间升级
中兴光猫工厂模式解锁神器:zteOnu让你的网络管理权限瞬间升级 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 你是否曾经想过,家里的中兴光猫其实隐藏着更多高级…...

Warcraft Helper:现代Windows环境下魔兽争霸3兼容性技术解决方案深度解析
Warcraft Helper:现代Windows环境下魔兽争霸3兼容性技术解决方案深度解析 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper Warcraft Helper…...