STM32两轮平衡小车原理详解
STM32两轮平衡小车是一种基于STM32微控制器的智能机器人,它能够通过传感器和算法实现自我平衡。以下是对STM32两轮平衡小车原理的详解,以及一些基础的代码示例。
原理详解
1. 系统组成
- 主控制器:STM32系列微控制器,作为小车的大脑。
- 传感器:通常包括陀螺仪(用于检测倾斜角度和角速度)和加速度计。
- 驱动器:电机驱动模块,用于控制电机的转速和方向。
- 电机:通常为直流电机,用于驱动小车前进和后退。
- 电源:为整个系统提供稳定的电源。
- 通信模块:用于与外部设备(如PC或智能手机)进行通信。
2. 工作原理
- 数据采集:传感器实时采集小车的姿态信息,包括倾斜角度和角速度。
- 数据处理:STM32微控制器接收传感器数据,并进行处理。
- 控制算法:微控制器内部运行PID(比例-积分-微分)控制算法,根据传感器数据计算出控制量。
- 电机控制:根据控制算法的结果,微控制器输出PWM信号控制电机的转速和转向,实现小车的平衡。
3. PID控制
PID控制是一种常见的反馈控制方法,它通过调整系统的输出,使得系统的输出与期望值之间的误差最小化。在两轮平衡小车中,PID控制用于调整电机的转速,以维持小车的平衡。
代码示例
以下是一些基础的STM32代码示例,用于实现两轮平衡小车的控制。
初始化代码
#include "stm32f10x.h"
#include "system_stm32f10x.h"
#include "usart.h"
#include "pwm.h"
#include "mpu6050.h"int main(void)
{// 系统初始化SystemInit();// 初始化串口用于调试输出USART1_Init();// 初始化PWM用于电机控制PWM_Init();// 初始化I2C用于与传感器通信I2C_Init();// 传感器初始化MPU6050_Init();while(1){// 读取传感器数据Read_MPU6050_Data();// 执行PID控制算法Execute_PID_Algorithm();// 控制电机Control_Motor();}
}
PID控制算法
#define Kp 1.0f // 比例系数
#define Ki 0.0f // 积分系数
#define Kd 0.0f // 微分系数float error_last = 0.0f; // 上一次误差
float error_sum = 0.0f; // 误差累积void Execute_PID_Algorithm()
{float error = Target_Angle - Current_Angle; // 计算误差float d_error = error - error_last; // 计算误差变化率// PID计算float output = Kp * error + Ki * error_sum + Kd * d_error;// 饱和度限制if(output > MAX_OUTPUT) output = MAX_OUTPUT;else if(output < -MAX_OUTPUT) output = -MAX_OUTPUT;// 更新PID参数error_last = error;error_sum += error;// 输出控制量PWM_Set_DutyCycle(output);
}
电机控制
#define MAX_OUTPUT 100void Control_Motor()
{// 根据PID输出控制电机// 这里只是一个示例,实际应用中需要根据电机驱动的具体实现来编写代码Set_Motor_Speed(LEFT_MOTOR, MAX_OUTPUT + pwm_value);Set_Motor_Speed(RIGHT_MOTOR, MAX_OUTPUT - pwm_value);
}
请注意,上述代码仅为示例,实际应用中需要根据具体的硬件配置和控制需求进行调整。此外,还需要编写用于初始化外设、读取传感器数据、设置PWM占空比等函数的具体实现代码。
✅作者简介:热爱科研的嵌入式开发者,修心和技术同步精进
❤欢迎关注我的知乎:对error视而不见
代码获取、问题探讨及文章转载可私信。
☁ 愿你的生命中有够多的云翳,来造就一个美丽的黄昏。
🍎获取更多嵌入式资料可点击链接进群领取,谢谢支持!👇
点击领取更多详细资料
相关文章:

STM32两轮平衡小车原理详解
STM32两轮平衡小车是一种基于STM32微控制器的智能机器人,它能够通过传感器和算法实现自我平衡。以下是对STM32两轮平衡小车原理的详解,以及一些基础的代码示例。 原理详解 1. 系统组成 主控制器:STM32系列微控制器,作为小车的大…...
如何评价一个数仓的好坏)
(笔记)如何评价一个数仓的好坏
如何评价一个数仓的好坏 1数据质量产生原因评估方法流程 2模型建设产生问题原因评估方法流程 3数据安全产生问题原因评估方法流程 4成本/性能产生问题原因评估方法流程 5 用户用数体验产生问题原因评估方法流程 6数据资产覆盖产生问题原因评估方法流程 数仓评价好坏是对数仓全流…...
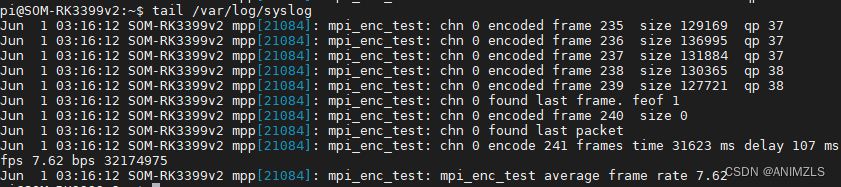
友善RK3399v2平台利用rkmpp实现硬件编解码加速
测试VPU 编译mpp sudo apt update sudo apt install gcc g cmake make cd ~ git clone https://github.com/rockchip-linux/mpp.git cd mpp/build/linux/aarch64/ sed -i s/aarch64-linux-gnu-gcc/gcc/g ./arm.linux.cross.cmake sed -i s/aarch64-linux-gnu-g/g/g ./arm.lin…...
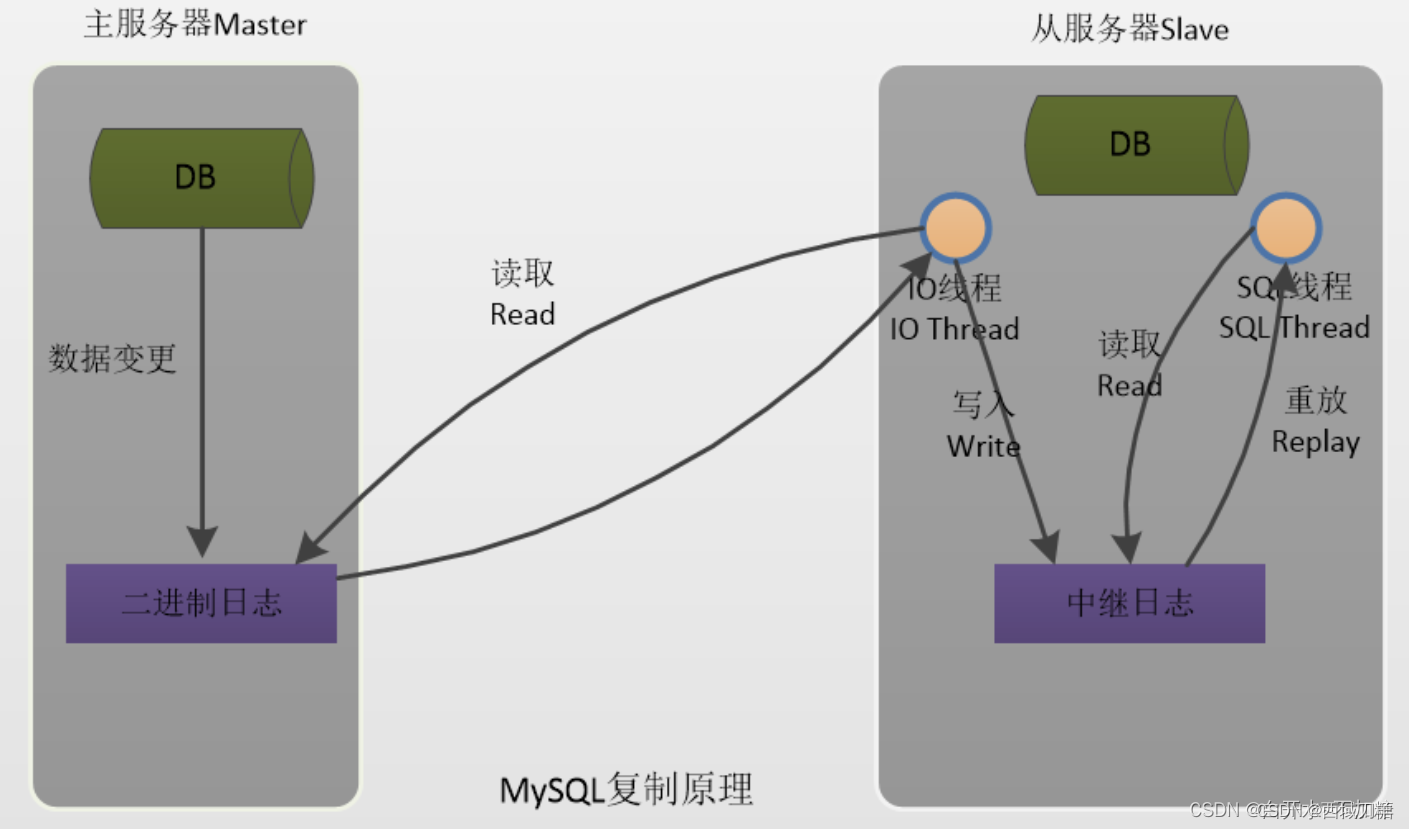
Mysql 8.0 主从复制及读写分离搭建记录
前言 搭建参考:搭建Mysql主从复制 为什么要做主从复制? 做数据的热备,作为后备数据库,主数据库服务器故障后,可切换到从数据库继续工作,避免数据丢失。架构的扩展。业务量越来越大,I/O访问频…...

PyTorch、显卡、CUDA 和 cuDNN 之间的关系
概述 PyTorch、显卡、CUDA 和 cuDNN 之间的关系及其工作原理可以这样理解: 显卡 (GPU) 显卡,特别是 NVIDIA 的 GPU,具有大量的并行处理单元,这些单元可以同时执行大量相似的操作,非常适合进行大规模矩阵运算&#x…...

Lambda 表达式练习
目录 sorted() 四种排序 List 转 Map map 映射 对象中 String 类型属性为空的字段赋值为 null BiConsumer,> T reduce(T identity, BinaryOperator accumulator) allMatch(Predicate p) groupingBy(Function f) flatMap(Function f) Optional.ofNullable(T t) 和 …...

JavaScript第七讲:数组,及练习题
目录 今天话不多说直接进入正题! 1. 创建数组对象 2. 数组长度 3. 遍历一个数组 4. 连接数组 5. 通过指定分隔符,返回一个数组的字符串表达 6. 分别在最后的位置插入数据和获取数据(获取后删除) 7. 分别在最开始的位置插入数据和获取数据(获取后删…...

从docker镜像反推Dockerfile
在项目运维的过程中,偶尔会遇到某个docker image打包时候的Dockerfile版本管理不善无法与image对应的问题,抑或需要分析某个三方docker image的构建过程,这时,就希望能够通过image反推构建时的instruction. 想实现这个过程可以使…...

车载软件架构 - AUTOSAR 的信息安全框架
车载软件架构 - AUTOSAR 的信息安全架构 我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 屏蔽力是信息过载时代一个人的特殊竞争力,任何消耗…...

欧洲版“OpenAI”——Mistral 举办的 AI 大模型马拉松
近期,法国的 Mistral AI 举办了一场别开生面的 AI 大模型马拉松。要知道,Mistral 可是法国对 OpenAI 的有力回应,而且其技术还是完全开源的呢!这场在巴黎举行的黑客马拉松,规模空前盛大,竟然有超过 1000 名…...
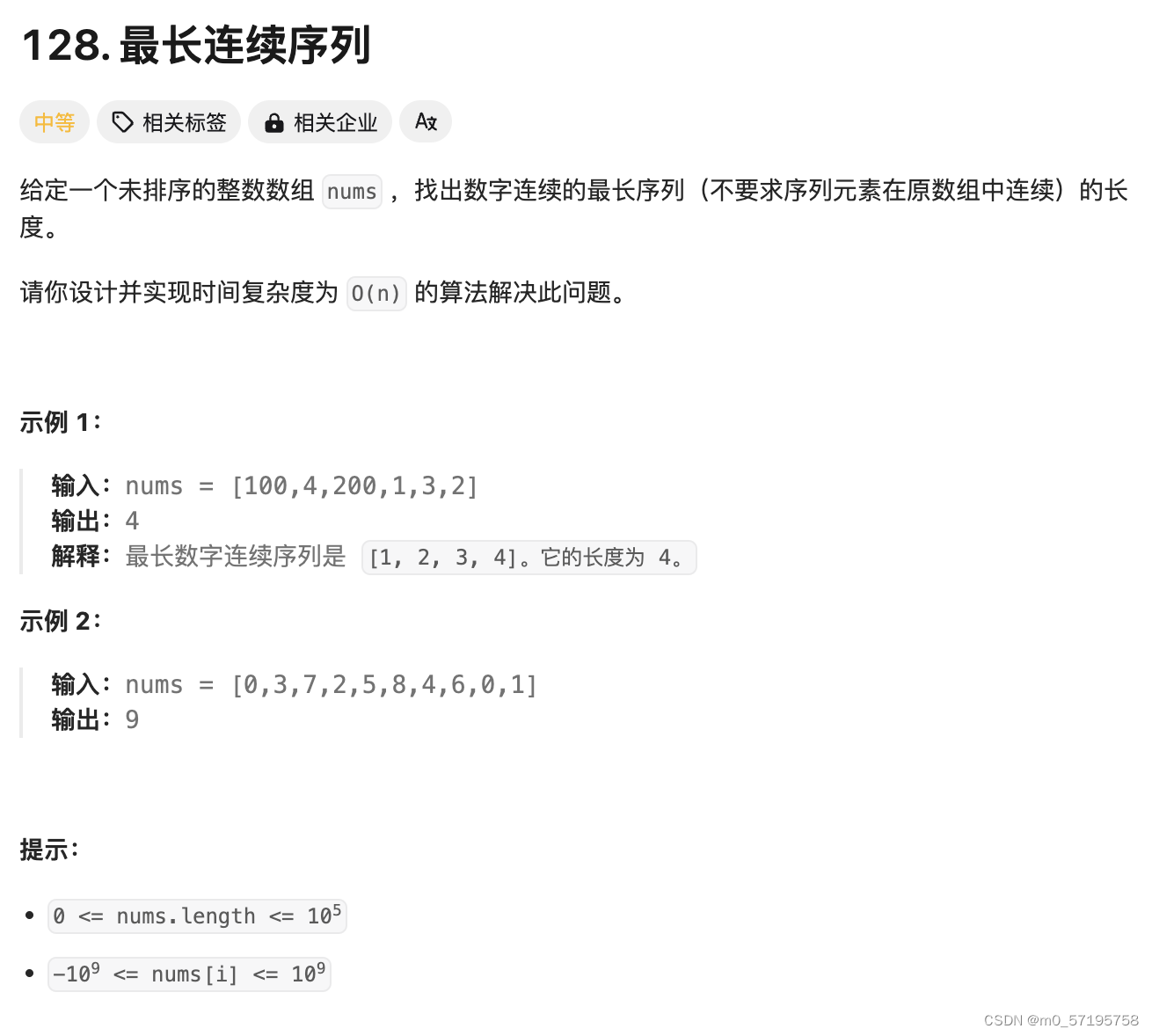
Java | Leetcode Java题解之第128题最长连续序列
题目: 题解: class Solution {public int longestConsecutive(int[] nums) {Set<Integer> num_set new HashSet<Integer>();for (int num : nums) {num_set.add(num);}int longestStreak 0;for (int num : num_set) {if (!num_set.contai…...
C++的List
List的使用 构造 与vector的区别 与vector的区别在于不支持 [ ] 由于链表的物理结构不连续,所以只能用迭代器访问 vector可以排序,list不能排序(因为快排的底层需要随机迭代器,而链表是双向迭代器) (算法库里的排序不支持)(需要单独的排序) list存在vector不支持的功能 链…...

网易有道QAnything使用CPU模式和openAI接口安装部署
网易有道QAnything可以使用本地部署大模型(官网例子为qwen)也可以使用大模型接口(OPENAI或者其他大模型AI接口 )的方式,使用在线大模型API接口好处就是不需要太高的硬件配置。 本机环境windows11 首先安装WSL环境, 安装方法参考https://zhuan…...

量子加速超级计算简介
本文转载自:量子加速超级计算简介(2024年 3月 13日) By Mark Wolf https://developer.nvidia.cn/zh-cn/blog/an-introduction-to-quantum-accelerated-supercomputing/ 文章目录 一、概述二、量子计算机的构建块:QPU 和量子位三、量子计算硬件和算法四、…...

Unity3D 基于YooAssets的资源管理详解
前言 Unity3D 是一款非常流行的游戏开发引擎,它提供了丰富的功能和工具来帮助开发者快速创建高质量的游戏和应用程序。其中,资源管理是游戏开发中非常重要的一部分,它涉及到如何有效地加载、管理和释放游戏中的各种资源,如模型、…...

Linux 自动化升级Jar程序,指定Jar程序版本进行部署脚本
文章目录 一、环境准备二、脚本1. 自动化升级Jar程序2. 指定Jar程序版本进行部署总结一、环境准备 本文在 CentOS 7.9 环境演示,以springboot为例,打包后生成文件名加上版本号,如下打包之后为strategy-api-0.3.2.jar: pom.xml<?xml version="1.0" encoding=&…...

python练习五
Title1:请实现一个装饰器,每次调用函数时,将函数名字以及调用此函数的时间点写入文件中 代码: import time time time.strftime("%Y-%m-%d %H:%M:%S", time.localtime()) # 获取当前的时间戳 # 定义一个有参装饰器来实…...
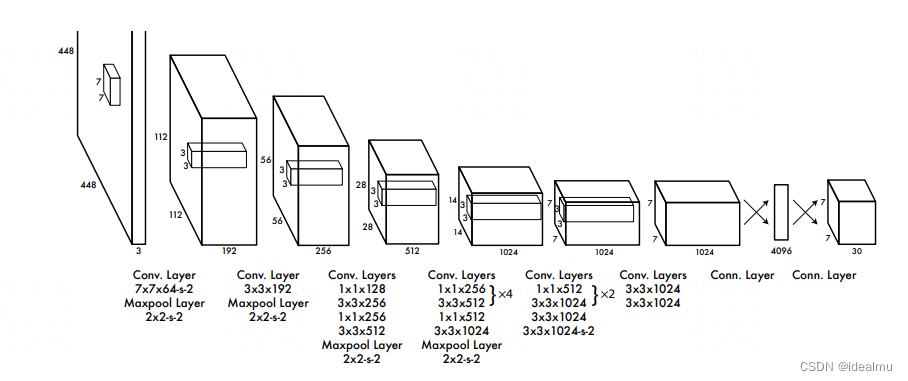
YOLOv1深入解析与实战:目标检测算法原理
参考: https://zhuanlan.zhihu.com/p/667046384 https://blog.csdn.net/weixin_41424926/article/details/105383064 https://arxiv.org/pdf/1506.02640 1. 算法介绍 学习目标检测算法,yolov1是必看内容,不同于生成模型,没有特别…...
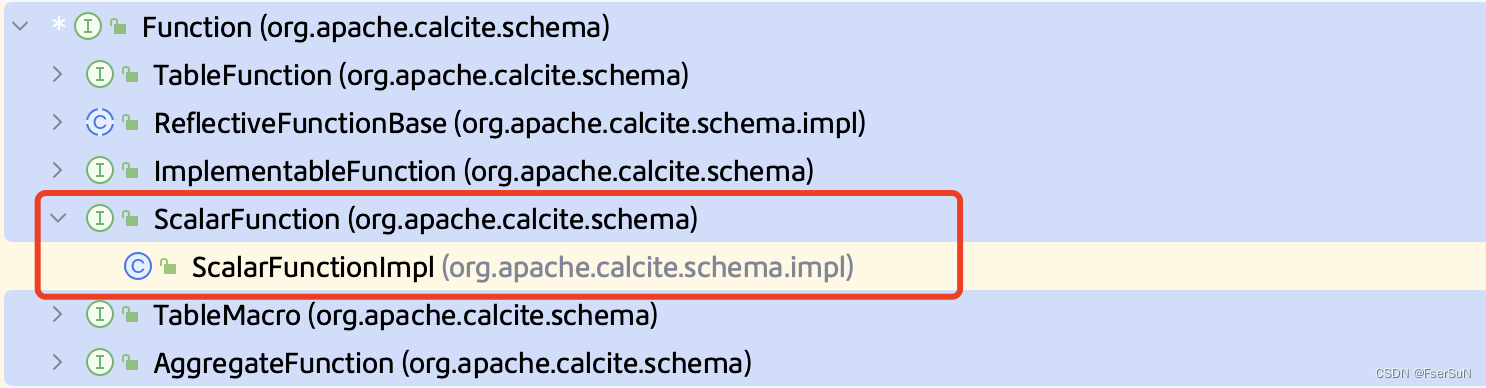
Apache Calcite - 自定义标量函数
前言 上一篇文章中我们介绍了calcite中内置函数的使用。实际需求中会遇到一些场景标准内置函数无法满足需求,这时候就需要用到自定义函数。在 Apache Calcite 中添加自定义函数,以便在 SQL 查询中使用自定义的逻辑。这对于执行特定的数据处理或分析任务…...
STM32作业实现(四)光敏传感器
目录 STM32作业设计 STM32作业实现(一)串口通信 STM32作业实现(二)串口控制led STM32作业实现(三)串口控制有源蜂鸣器 STM32作业实现(四)光敏传感器 STM32作业实现(五)温湿度传感器dht11 STM32作业实现(六)闪存保存数据 STM32作业实现(七)OLED显示数据 STM32作业实现(八)触摸按…...

向量数据库是什么?Milvus 与 ChromaDB 在 AI 测试中的作用
导语:2025年,AI应用开发圈最火的两个关键词——RAG(检索增强生成)和向量数据库。你可能已经用LangChain搭过聊天机器人,用LlamaIndex建过知识库,但你有没有认真想过:那个默默躺在你架构图最底层的向量数据库,到底该选谁?Milvus还是ChromaDB?它们到底有什么区别?对你…...

3种方法彻底解决Realtek RTL8125 2.5GbE网卡驱动兼容性问题
3种方法彻底解决Realtek RTL8125 2.5GbE网卡驱动兼容性问题 【免费下载链接】realtek-r8125-dkms A DKMS package for easy use of Realtek r8125 driver, which supports 2.5 GbE. 项目地址: https://gitcode.com/gh_mirrors/re/realtek-r8125-dkms 你是否正在为Linux系…...

焊接风管制造技术前沿:厂家工艺揭秘
在现代工业与建筑领域,焊接风管扮演着至关重要的角色。从工业厂房的通风换气,到商业建筑的空气调节,焊接风管都起着保障空气流通、维持环境舒适的关键作用。其质量的优劣直接影响到整个通风系统的性能和使用寿命。优质的焊接风管不仅能有效降…...
)
40岁IT运维被裁了,换赛道!一切皆有可能(普通人可借鉴)
40岁IT运维被裁了,换赛道!一切皆有可能(普通人可借鉴) 外人总觉得做IT很轻松,敲敲键盘就能赚钱。只有业内人清楚,这行根本藏不住焦虑。技术更新太快。 40岁的职业红线,一直压在所有IT人身上。…...
)
【Perplexity语言学习资源黄金组合】:搭配Anki+TTS+语法解析器的「零依赖」自主学习系统(仅需1台设备)
更多请点击: https://codechina.net 第一章:Perplexity语言学习资源黄金组合的系统定位与核心价值 Perplexity 作为一款以实时检索增强生成(RAG)为核心架构的AI问答引擎,其在语言学习领域的独特价值并非源于通用对话能…...

SMUDebugTool:5个技巧掌握AMD Ryzen底层硬件调试的完整指南
SMUDebugTool:5个技巧掌握AMD Ryzen底层硬件调试的完整指南 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https…...

Show-o2 3D Causal VAE空间:为文本、图像和视频模态提供可扩展解决方案
Show-o2 3D Causal VAE空间:为文本、图像和视频模态提供可扩展解决方案 【免费下载链接】Show-o [ICLR & NeurIPS 2025] Repository for Show-o series, One Single Transformer to Unify Multimodal Understanding and Generation. 项目地址: https://gitcod…...

5分钟掌握AMD处理器调优:新手也能轻松上手的硬件调试完整教程
5分钟掌握AMD处理器调优:新手也能轻松上手的硬件调试完整教程 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: htt…...

别再死记硬背UML关系了!用4+1视图帮你理清类图、时序图到底画给谁看
别再死记硬背UML关系了!用41视图帮你理清类图、时序图到底画给谁看 在软件工程领域,UML(统一建模语言)是每个开发者都绕不开的话题。但有多少人真正理解这些图形的实际应用场景?我们常常看到这样的现象:团队…...

模型越来越强,为什么真正拉开差距的却是向量引擎
模型越来越强,为什么真正拉开差距的却是向量引擎2026年的 AI 圈很吵。 但吵来吵去,核心其实只有一个问题。 模型更会说了。 为什么很多系统还是不好用。 答案往往不在模型参数里。 答案在入口、记忆、工具连接和上下文治理里。 你会发现一个很有意思的现…...