Python+Yolov8目标识别特征检测
Yolov8目标识别特征检测
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
前言
这篇博客针对<<Yolov8目标识别特征检测>>编写代码,代码整洁,规则,易读。 学习与应用推荐首选。
文章目录
一、所需工具软件
二、使用步骤
1. 引入库
2. 识别图像特征
3. 参数设置
4. 运行结果
三、在线协助
一、所需工具软件
1. Pycharm, Python
2. Yolov8, OpenCV
二、使用步骤
1.引入库
代码如下(示例):
import torchfrom ultralytics.yolo.engine.predictor import BasePredictor
from ultralytics.yolo.engine.results import Results
from ultralytics.yolo.utils import DEFAULT_CFG, ROOT, ops
from ultralytics.yolo.utils.plotting import Annotator, colors, save_one_box
2.识别图像特征
代码如下(示例):
class DetectionPredictor(BasePredictor):def get_annotator(self, img):return Annotator(img, line_width=self.args.line_thickness, example=str(self.model.names))def preprocess(self, img):img = torch.from_numpy(img).to(self.model.device)img = img.half() if self.model.fp16 else img.float() # uint8 to fp16/32img /= 255 # 0 - 255 to 0.0 - 1.0return imgdef postprocess(self, preds, img, orig_img):preds = ops.non_max_suppression(preds,self.args.conf,self.args.iou,agnostic=self.args.agnostic_nms,max_det=self.args.max_det,classes=self.args.classes)results = []for i, pred in enumerate(preds):orig_img = orig_img[i] if isinstance(orig_img, list) else orig_imgshape = orig_img.shapepred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], shape).round()results.append(Results(boxes=pred, orig_img=orig_img, names=self.model.names))return resultsdef write_results(self, idx, results, batch):p, im, im0 = batchlog_string = ''if len(im.shape) == 3:im = im[None] # expand for batch dimself.seen += 1imc = im0.copy() if self.args.save_crop else im0if self.source_type.webcam or self.source_type.from_img: # batch_size >= 1log_string += f'{idx}: 'frame = self.dataset.countelse:frame = getattr(self.dataset, 'frame', 0)self.data_path = pself.txt_path = str(self.save_dir / 'labels' / p.stem) + ('' if self.dataset.mode == 'image' else f'_{frame}')log_string += '%gx%g ' % im.shape[2:] # print stringself.annotator = self.get_annotator(im0)det = results[idx].boxes # TODO: make boxes inherit from tensorsif len(det) == 0:return log_stringfor c in det.cls.unique():n = (det.cls == c).sum() # detections per classlog_string += f"{n} {self.model.names[int(c)]}{'s' * (n > 1)}, "# writefor d in reversed(det):cls, conf = d.cls.squeeze(), d.conf.squeeze()if self.args.save_txt: # Write to fileline = (cls, *(d.xywhn.view(-1).tolist()), conf) \if self.args.save_conf else (cls, *(d.xywhn.view(-1).tolist())) # label formatwith open(f'{self.txt_path}.txt', 'a') as f:f.write(('%g ' * len(line)).rstrip() % line + '\n')if self.args.save or self.args.save_crop or self.args.show: # Add bbox to imagec = int(cls) # integer classname = f'id:{int(d.id.item())} {self.model.names[c]}' if d.id is not None else self.model.names[c]label = None if self.args.hide_labels else (name if self.args.hide_conf else f'{name} {conf:.2f}')self.annotator.box_label(d.xyxy.squeeze(), label, color=colors(c, True))if self.args.save_crop:save_one_box(d.xyxy,imc,file=self.save_dir / 'crops' / self.model.model.names[c] / f'{self.data_path.stem}.jpg',BGR=True)return log_string
3.参数定义
代码如下(示例):
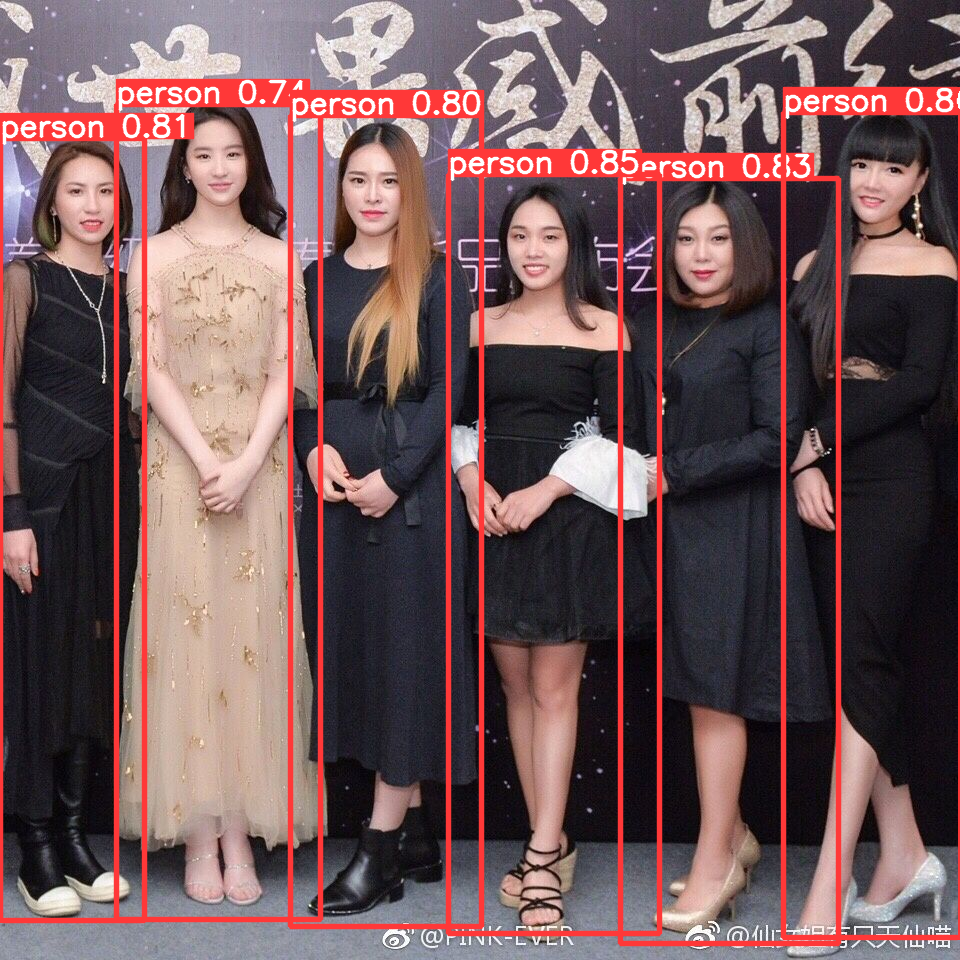
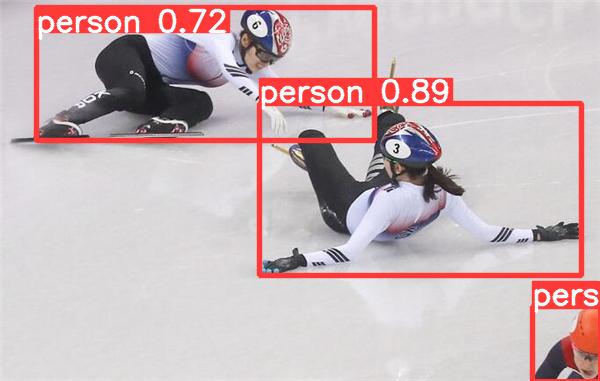
if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--weights', nargs='+', type=str, default='yolov5_best_road_crack_recog.pt', help='model.pt path(s)')parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')parser.add_argument('--view-img', action='store_true', help='display results')parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')parser.add_argument('--classes', nargs='+', type=int, default='0', help='filter by class: --class 0, or --class 0 2 3')parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')parser.add_argument('--augment', action='store_true', help='augmented inference')parser.add_argument('--update', action='store_true', help='update all models')parser.add_argument('--project', default='runs/detect', help='save results to project/name')parser.add_argument('--name', default='exp', help='save results to project/name')parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')opt = parser.parse_args()4.运行结果如下


三、在线协助:
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
1)远程安装运行环境,代码调试
2)Qt, C++, Python入门指导
3)界面美化
4)软件制作
博主推荐文章:https://blog.csdn.net/alicema1111/article/details/123851014
个人博客主页:https://blog.csdn.net/alicema1111?type=blog
博主所有文章点这里:https://blog.csdn.net/alicema1111?type=blog
相关文章:
Python+Yolov8目标识别特征检测
Yolov8目标识别特征检测如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!前言这篇博客针对<<Yolov8目标识别特征检测>>编写代码,代码整洁,规则,易读。 学习与应用推荐…...
欢迎使用Markdown编辑器
这里写自定义目录标题欢迎使用Markdown编辑器新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants创建一个自定义列表如何创建一个注…...
Mac环境安装python
一、介绍: Python是跨平台的,它可以运行在Windows、Mac和各种Linux/Unix系统上。在Windows上写Python程序,放到Linux上也是能够运行的。 要开始学习Python编程,首先就得把Python安装到你的电脑里。安装后,你会得到Pyt…...

2023年全国最新交安安全员精选真题及答案16
百分百题库提供交安安全员考试试题、交安安全员考试预测题、交安安全员考试真题、交安安全员证考试题库等,提供在线做题刷题,在线模拟考试,助你考试轻松过关。 一、判断题: 1.施工单位应当向作业人员提供安全防护用具和安全防护服…...
项目实战-瑞吉外卖day02(B站)持续更新
瑞吉外卖-Day02课程内容完善登录功能新增员工员工信息分页查询启用/禁用员工账号编辑员工信息1. 完善登录功能1.1 问题分析前面我们已经完成了后台系统的员工登录功能开发,但是目前还存在一个问题,接下来我们来说明一个这个问题, 以及如何处理…...
2018年MathorCup数学建模D题公交移动支付问题的评估方案解题全过程文档及程序
2018年第八届MathorCup高校数学建模挑战赛 D题 公交移动支付问题的评估方案 原题再现: 随着智能手机的普及和移动支付技术的提高,越来越多的支付手段可以转移到手机端。现有的现金缴费和实体公交卡刷卡的付费方式存在缺点,如公交卡在使用过程中存在着充…...

js原型和原型链到底是什么
有必要重新审视js原型链 经大量资料查找之后自我理解的总结: 一说原型有太多的总结,把我都给劝退了,太多所谓的名词:constructor | proto | prototype | Object.prototype | Function.prototype | new 从js的底层来理解…...
RocketMQ5.0.0消息消费<二> _ 消息队列负载均衡机制
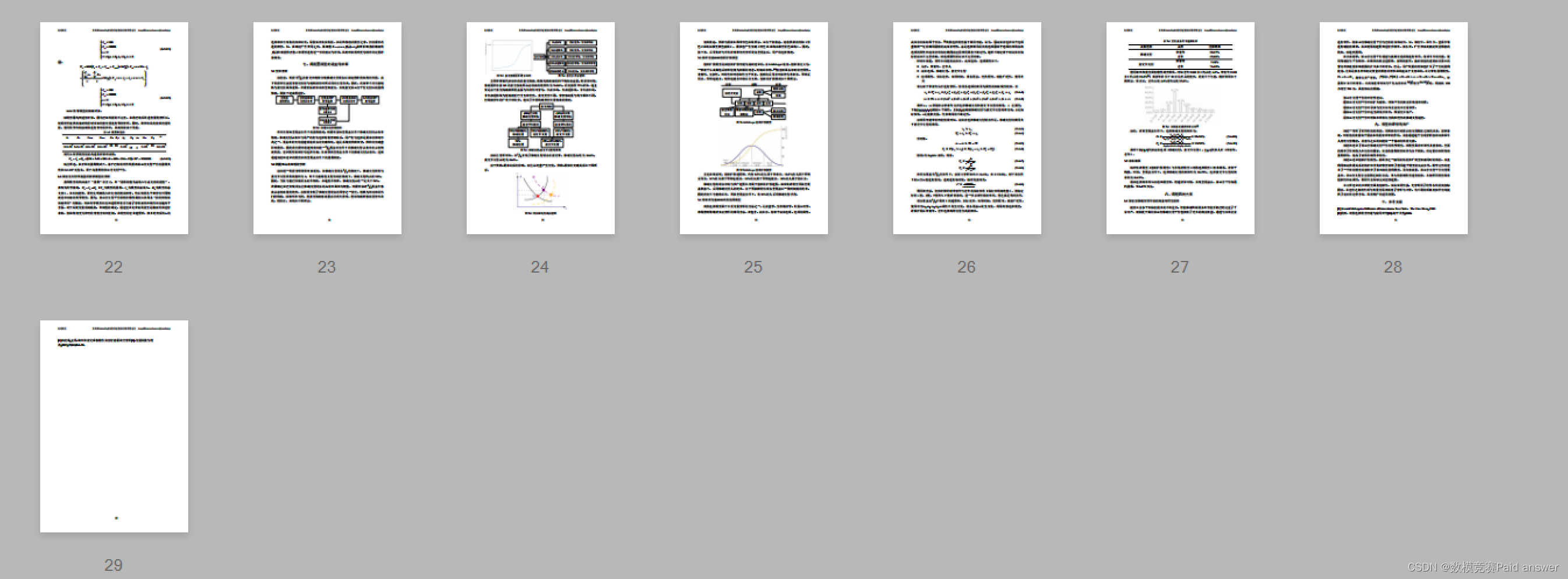
目录 一、消费队列负载均衡概览 二、消费队列负载均衡实现 1. 负载均衡UML 2. 启动RebalanceService线程 3. PUSH模式负载均衡 三、负载均衡策略 四、参考资料 一、消费队列负载均衡概览 RocketMQ默认一个主题下有4个消费队列,集群模式下同一消费组内要求每个…...
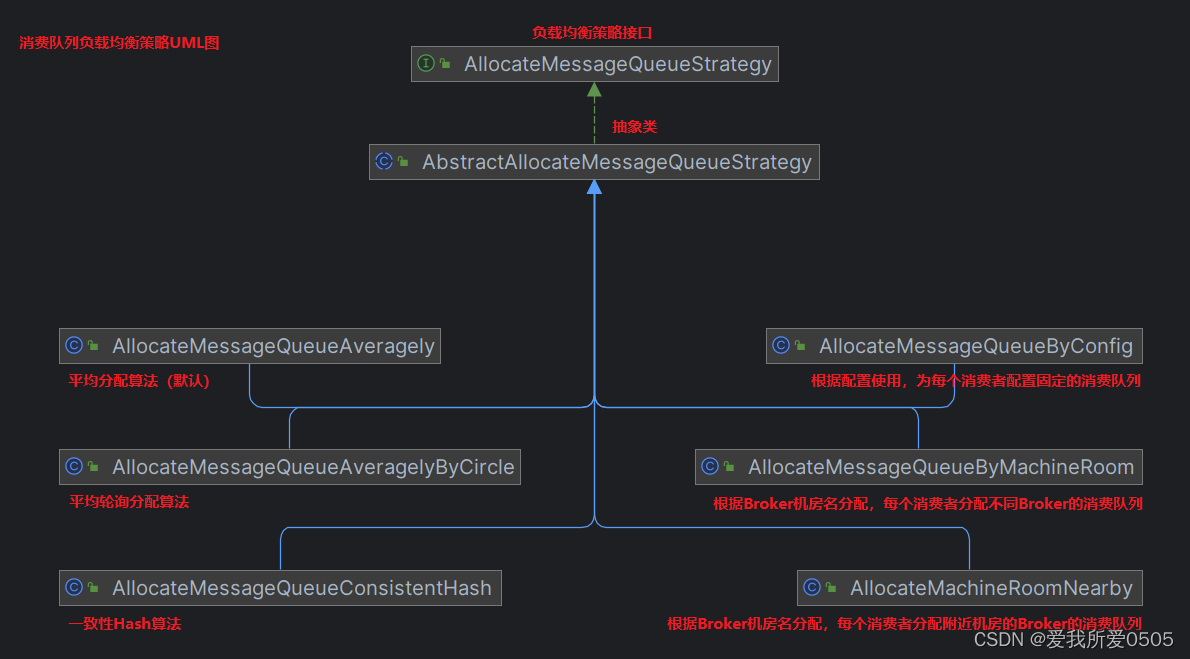
【数据库】MySQL数据库约束(六大约束)
目录 1.数据库约束 1.1约束类型 1.2 非空约束(NOT NULL ) 1.3 唯一约束(UNIQUE) 1.4默认值约束(DEFAULT ) 1.5主键约束(PRIMARY KEY) 1.6外键约束(FOREIGN KEY &…...

使用inotify监视文件后台运行收到 SIGTTIN 信号的原因及解决方案
一、起因 由于之前写了个程序要实时监控指定文件的变化状态,所以使用了“inotify”进行监视。但是却发现用了“inotify”之后进程无法手动后台运行了。 也就是 ./process.exe &,这种方法不行了。 原因是: 当使用inotify监视文件变化时&a…...
L3-021 神坛
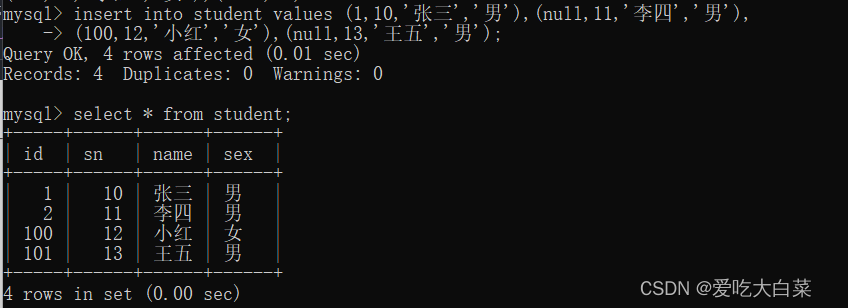
在古老的迈瑞城,巍然屹立着 n 块神石。长老们商议,选取 3 块神石围成一个神坛。因为神坛的能量强度与它的面积成反比,因此神坛的面积越小越好。特殊地,如果有两块神石坐标相同,或者三块神石共线,神坛的面积…...

ArrayList和LinkedList区别
List<TreeNode> list new ArrayList<TreeNode>(); List<TreeNode> allTrees new LinkedList<TreeNode>(); 这两行代码都是用来创建一个存储多个 TreeNode 对象的列表,但是它们使用的底层实现不同。 ArrayList 是一种数组实现的动态数组&…...

977. 有序数组的平方 1. 两数之和 349. 两个数组的交集
给你一个按 非递减顺序 排序的整数数组 nums,返回 每个数字的平方 组成的新数组,要求也按 非递减顺序 排序。 示例 1: 输入:nums [-4,-1,0,3,10] 输出:[0,1,9,16,100] 解释:平方后,数组变为 …...
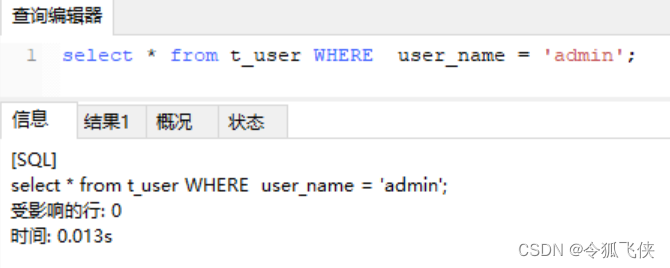
Mysql问题:[Err] 1055 - Expression #1 of ORDER BY clause is not in GROUP BY clause
1 问题描述 使用Navicat连接到MySQL(版本:8.0.18),执行查询: select * from t_user WHERE user_name admin查询结果没有问题,但是报错: [Err] 1055 - Expression #1 of ORDER BY clause is not in GROUP BY claus…...

Idea springboot springCloud热加载热调试常用的两种方式
场景描述 在项目开发的过程中,需要修改调试的时候偶每次都需要重启项目浪费时间,下面是我整理的两种常用的两种方式方式一 修改启动配置方式(主要针对debug模式下) 点击启动配置》edit configrations… configration下面修改Upd…...
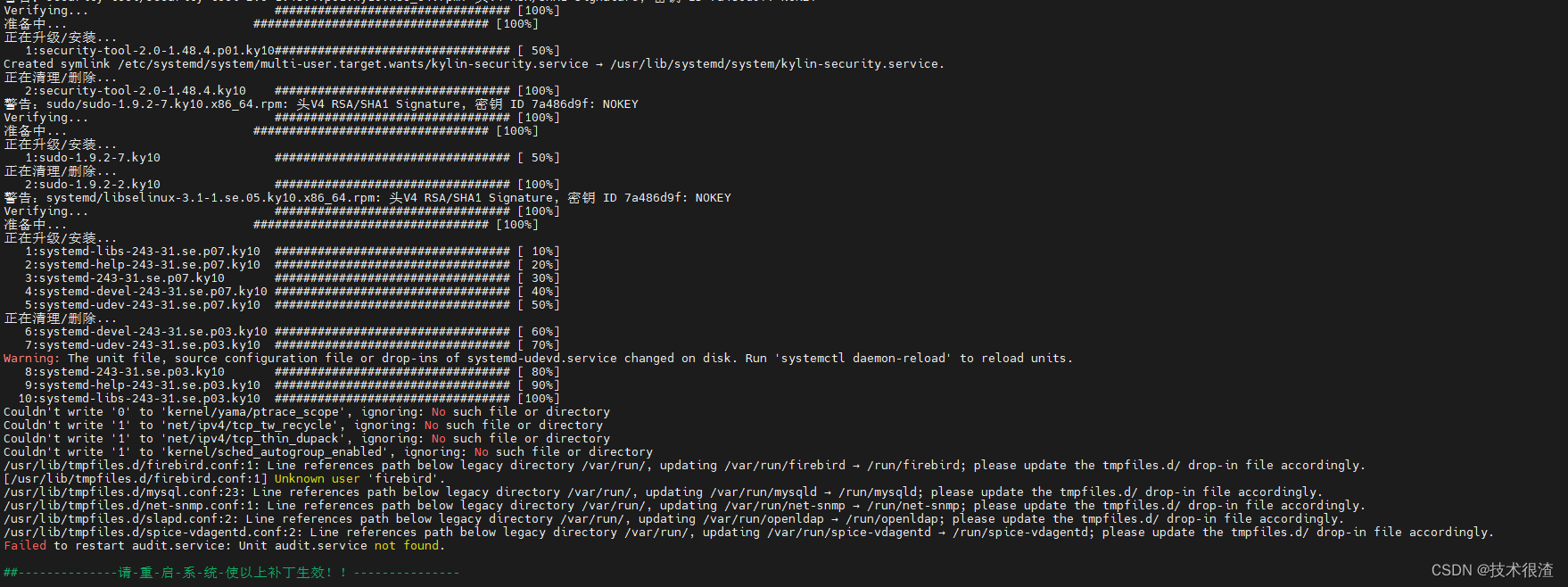
银河麒麟V10SP1高级服务器版本离线RPM方式升级openssl openssh 自动化升级系统补丁实战实例全网唯一
银河麒麟高级服务器操作系统简介: 银河麒麟高级服务器操作系统V10是针对企业级关键业务,适应虚拟化、云计算、大数据、工业互联网时代对主机系统可靠性、安全性、性能、扩展性和实时性等需求,依据CMMI5级标准研制的提供内生本质安全、云原生支…...

2023-3-9-一篇简短的文章把C++左右值关系讲的透透彻彻
目录前言C左值和右值二、右值引用二、右值引用前言 对于C的左值和右值相信很多人都没有一个很透彻的了解,之前我也是不懂的时候查阅了好多文章,但是讲完我还是一头雾水,直到我遇到一篇宝藏文章,讲的左值右值的关系以及Move函数的用法是相当的清楚,文章链接在这,话不多说讲解一…...
Vue3这样子写页面更快更高效
在开发管理后台过程中,一定会遇到不少了增删改查页面,而这些页面的逻辑大多都是相同的,如获取列表数据,分页,筛选功能这些基本功能。而不同的是呈现出来的数据项。还有一些操作按钮。 对于刚开始只有 1,2 个页面的时候大多数开发者可能会直接将之前的页面代码再拷贝多…...
)
锐捷AP设置限速(胖模式)
基于整个AP限速命令 Ruijie(config)#wlan-qos ap-based { per-user-limit | total-user-limit } { down-streams | up-streams } average-data-rate average-data-rate burst-data-rate burst-data-rate per-user-limit 对AP上的每个用户进行限速 …...

聚势合力,电巢与SDIA协会“战略合作签约仪式”圆满落成
前言: 2023年03月02日下午,电巢科技与深圳市平板显示行业协会齐聚深圳南山电巢XR演播厅,共同举办了隆重的战略合作签约仪式。 双方就数字化建设、品牌赋能、人才培养、技术创新等企业服务深入合作上达成一致,合力为产业赋能&…...

会用AI的人,早已拉开职场差距!全岗位工作范式重构进行时
AI深度融入职场,正在改写工作的底层逻辑,会用AI的从业者,已在工作效率与职业发展上形成明显优势。从开发人员的研发流程,到方案人员的工作模式,再到各行各业的基础岗位,AI不再只是简单的效率工具࿰…...

实测才敢推 AI论文工具推荐:2026最新测评与使用体验
2026年真正好用的AI论文工具,核心看生成的论文质量、低AI味、格式正确、学术适配四大指标。综合实测,千笔AI、ThouPen、豆包、DeepSeek、Grammarly 是当前最值得推荐的梯队,覆盖从免费到付费、从中文到英文、从文科到理工的全场景需求。 一、…...

RustDesk 中继服务器搭建指南:告别卡顿,实现高效远程控制
1. 为什么你需要自建RustDesk中继服务器 远程办公已经成为现代工作方式的标配,但很多人在使用公共远程控制服务时都遇到过令人抓狂的卡顿问题。想象一下,你正在紧急处理服务器故障,画面却卡成了PPT;或者需要远程协助家人修电脑&a…...

QGIS 3.28 保姆级配置指南:从中文界面到高德底图,手把手搞定智驾地图工作流
QGIS 3.28 智能驾驶地图工程师开箱指南:从零构建高精度工作流 刚拿到工牌的智能驾驶地图工程师小李,面对全新的QGIS界面有些手足无措。作为空间数据处理的核心工具,QGIS的配置直接决定了后续高精地图生产的效率与精度。本文将带你完成从软件…...

51单片机Proteus仿真实战:从零构建流水灯系统
1. 环境准备:搭建51单片机开发环境 第一次接触51单片机的朋友可能会被各种工具软件搞晕,其实只需要两个核心工具就能完成流水灯仿真:Proteus和Keil。我刚开始学单片机时也踩过不少坑,这里把最稳定的版本和安装要点分享给大家。 Pr…...
)
【手把手】FFmpeg音视频开发从入门到实战:一文吃透音视频同步原理与代码实现(附完整源码)
文章目录第一章 基础必懂:音视频开发的核心概念与FFmpeg框架1.1 别再被封装格式忽悠:MP4、MKV、AVI到底差在哪?1.2 搞懂解码流程:FFmpeg处理音视频的4个核心结构体第二章 深入原理:音视频同步的核心机制2.1 播放器卡顿…...
)
Windows Server远程管理新选择:一键脚本部署noVNC服务端(含开机自启配置)
Windows Server远程管理新选择:一键脚本部署noVNC服务端(含开机自启配置) 对于需要管理Windows Server的系统管理员来说,远程访问是不可或缺的功能。传统的RDP虽然稳定,但在某些场景下可能受限,比如网络环境…...

QT窗口特效实战:从透明到异形控件的全方位实现指南
1. 从零开始理解QT窗口特效 第一次接触QT窗口特效时,我被那些酷炫的透明和异形界面深深吸引。记得当时看到Mac OS X的Dock栏那种毛玻璃效果,就特别想在自己的QT应用中实现类似效果。经过多年实战,我发现QT实现这些特效其实比想象中简单得多。…...
)
SpringBoot+Vue实战:手把手教你搭建社区居民健康档案管理系统(附完整源码)
SpringBootVue实战:从零构建社区居民健康档案管理系统 在数字化转型浪潮下,社区卫生服务正经历着从纸质档案到智能化管理的转变。对于Java开发者而言,这不仅是技术练兵的好机会,更是解决实际社会需求的切入点。本文将带你用Spring…...

TikTok零/低播放突围:跨境账号实战破局指南
图片来源:TK云大师0播放或低播放是TikTok跨境从业者的高频痛点——行业数据显示,超68%新手账号遇初始零播放,45%带货账号因持续低播放停摆。耗时制作的内容无人问津,既耗资源又乱节奏。结合实操经验,本文从排查、挽救、…...