比较(二)利用python绘制雷达图
比较(二)利用python绘制雷达图
雷达图(Radar Chart)简介
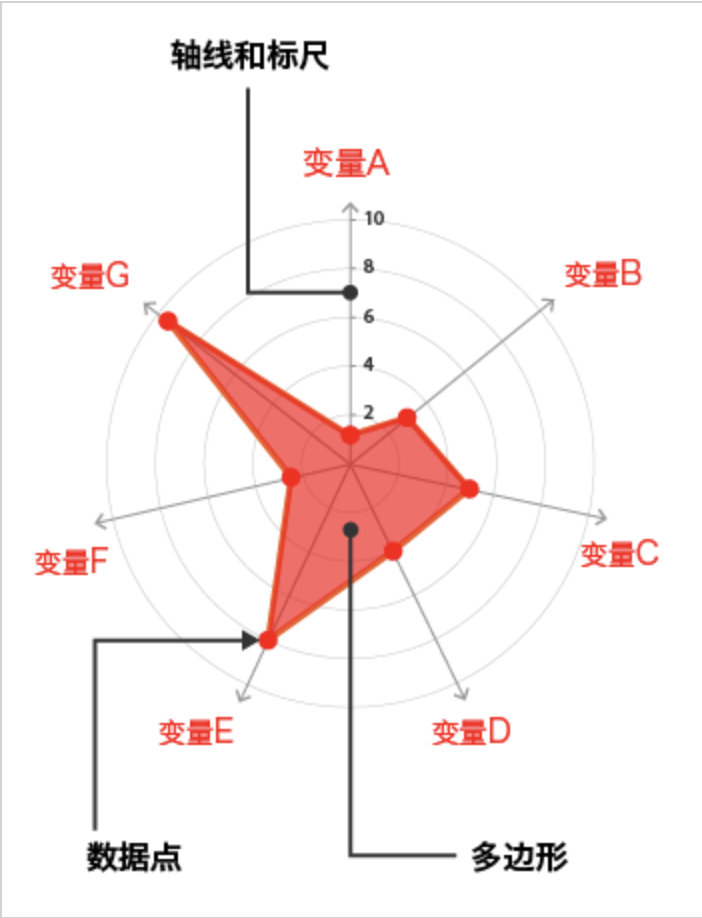
雷达图可以用来比较多个定量变量,也可以用于查看数据集中变量的得分高低,是显示性能表现的理想之选。缺点是变量过多容易造成阅读困难。
快速绘制
-
基于matplotlib
import matplotlib.pyplot as plt import pandas as pd from math import pi# 自定义数据 df = pd.DataFrame({ 'group': ['A','B','C','D'], 'var1': [38, 1.5, 30, 4], 'var2': [29, 10, 9, 34], 'var3': [8, 39, 23, 24], 'var4': [7, 31, 33, 14], 'var5': [28, 15, 32, 14] })# 计算变量个数 categories=list(df)[1:] N = len(categories)# 仅绘制第一行数据的雷达图 values = df.loc[0].drop('group').values.flatten().tolist() # 获取第一行数据,剔除group values += values[:1] # 闭合圆形图,需要在末尾增加一个与起始相同的值# 计算每个轴的角度 angles = [n / float(N) * 2 * pi for n in range(N)] # 每个变量的角度位置 angles += angles[:1] # 闭合圆形图,需要在末尾增加一个与起始相同的值# 初始化布局 ax = plt.subplot(111, polar=True)# 将每个变量绘制在极坐标上 plt.xticks(angles[:-1], categories, color='grey', size=8)# y标签 ax.set_rlabel_position(0) plt.yticks([10,20,30], ["10","20","30"], color="grey", size=7) plt.ylim(0,40)# 绘制数据 ax.plot(angles, values, linewidth=1, linestyle='solid')# 填充区域颜色 ax.fill(angles, values, 'b', alpha=0.1)plt.show()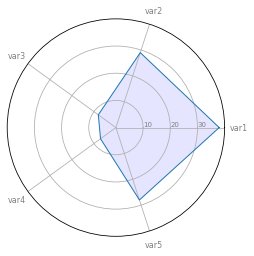
定制多样化的雷达图
自定义雷达图一般是结合使用场景对相关参数进行修改,并辅以其他的绘图知识。参数信息可以通过官网进行查看,其他的绘图知识则更多来源于实战经验,大家不妨将接下来的绘图作为一种学习经验,以便于日后总结。
-
一图绘制多个雷达图
import matplotlib.pyplot as plt import pandas as pd from math import pi# 自定义数据 df = pd.DataFrame({ 'group': ['A','B','C','D'], 'var1': [38, 1.5, 30, 4], 'var2': [29, 10, 9, 34], 'var3': [8, 39, 23, 24], 'var4': [7, 31, 33, 14], 'var5': [28, 15, 32, 14] })# 计算变量个数 categories=list(df)[1:] N = len(categories)# 仅绘制第一行数据的雷达图 values = df.loc[0].drop('group').values.flatten().tolist() # 获取第一行数据,剔除group values += values[:1] # 闭合圆形图,需要在末尾增加一个与起始相同的值# 计算每个轴的角度 angles = [n / float(N) * 2 * pi for n in range(N)] # 每个变量的角度位置 angles += angles[:1] # 闭合圆形图,需要在末尾增加一个与起始相同的值# 初始化布局 ax = plt.subplot(111, polar=True)# 偏移-将第一个轴位于顶部 ax.set_theta_offset(pi / 2) ax.set_theta_direction(-1)# 将每个变量绘制在极坐标上 plt.xticks(angles[:-1], categories)# y标签 ax.set_rlabel_position(0) plt.yticks([10,20,30], ["10","20","30"], color="grey", size=7) plt.ylim(0,40)# 添加多个极坐标图 # 绘制第一个图 values = df.loc[0].drop('group').values.flatten().tolist() values += values[:1] ax.plot(angles, values, linewidth=1, linestyle='solid', label="group A") ax.fill(angles, values, 'b', alpha=0.1)# 绘制第二个图 values = df.loc[1].drop('group').values.flatten().tolist() values += values[:1] ax.plot(angles, values, linewidth=1, linestyle='solid', label="group B") ax.fill(angles, values, 'r', alpha=0.1)# 图例 plt.legend(loc='upper right', bbox_to_anchor=(0.1, 0.1))plt.show()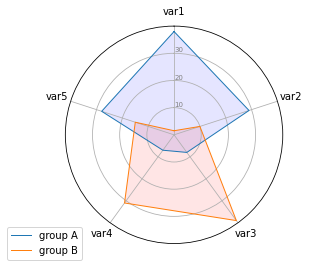
-
分组雷达图
import matplotlib.pyplot as plt import pandas as pd from math import pi# 自定义数据 df = pd.DataFrame({ 'group': ['A','B','C','D'], 'var1': [38, 1.5, 30, 4], 'var2': [29, 10, 9, 34], 'var3': [8, 39, 23, 24], 'var4': [7, 31, 33, 14], 'var5': [28, 15, 32, 14] })# 自定义函数-每一行绘制一个雷达图 def make_spider( row, title, color):# 计算变量个数categories=list(df)[1:]N = len(categories)# 计算角度angles = [n / float(N) * 2 * pi for n in range(N)]angles += angles[:1]# 初始化布局ax = plt.subplot(2,2,row+1, polar=True, )# 偏移至顶部ax.set_theta_offset(pi / 2)ax.set_theta_direction(-1)# x标签plt.xticks(angles[:-1], categories, color='grey', size=8)# y标签ax.set_rlabel_position(0)plt.yticks([10,20,30], ["10","20","30"], color="grey", size=7)plt.ylim(0,40)# 极坐标图values = df.loc[row].drop('group').values.flatten().tolist()values += values[:1]ax.plot(angles, values, color=color, linewidth=2, linestyle='solid')ax.fill(angles, values, color=color, alpha=0.4)# 标题plt.title(title, size=11, color=color, y=1.1)# 图标参数 my_dpi=96 plt.figure(figsize=(1000/my_dpi, 1000/my_dpi), dpi=my_dpi)# 调色板 my_palette = plt.cm.get_cmap("Set2", len(df.index))# 绘制多个图 for row in range(0, len(df.index)):make_spider( row=row, title='group '+df['group'][row], color=my_palette(row))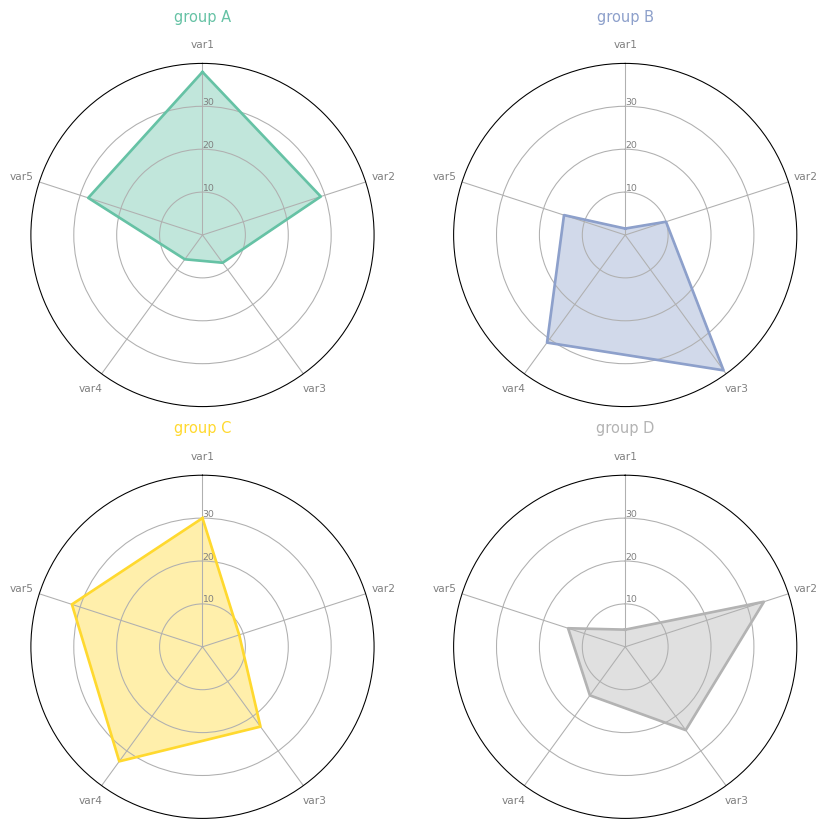
总结
以上通过matplotlib结合极坐标绘制雷达图,并通过其他绘图知识自定义各种各样的雷达图来适应相关使用场景。
共勉~
相关文章:
比较(二)利用python绘制雷达图
比较(二)利用python绘制雷达图 雷达图(Radar Chart)简介 雷达图可以用来比较多个定量变量,也可以用于查看数据集中变量的得分高低,是显示性能表现的理想之选。缺点是变量过多容易造成阅读困难。 快速绘制…...

Visual Studio怎么用?
Visual Studio的使用涉及多个方面,以下是一个清晰的使用指南,涵盖了Visual Studio的基本功能、安装、界面介绍、项目创建、代码编写、调试和发布等关键步骤: 一、Visual Studio简介 Visual Studio是由微软公司开发的一款集成开发环境&#…...

Python工程中,__init__.py文件有什么用
在Python工程中,__init__.py 文件有几个重要的用途: 标识目录为包: 在Python 3.3之前,__init__.py 文件的存在是为了告诉解释器,该目录是一个Python包。这使得包中的模块可以被导入和使用。即使在Python 3.3之后可以没…...

YOLOv10环境搭建推理测试
引子 两个多月前YOLOv9发布(感兴趣的童鞋可以移步YOLOv9环境搭建&推理测试_yolov9安装-CSDN博客),这才过去这么短的时间,YOLOv10就横空出世了。现在YOLO系列搞得就和追剧一样了。。。OK,那就让我们开始吧。 一、…...
tomcat-memcached会话共享配置
目录 1、安装memcache服务 2、把依赖的jar包移至tomcat/lib目录下 3、配置tomcat/conf/context.xml 4、重启tomcat服务 1、安装memcache服务 具体安装步骤此处不详细说明,自行根据实际情况安装即可 2、把依赖的jar包移至tomcat/lib目录下 3、配置tomcat/conf/c…...

404错误页面源码,简单实用的html错误页面模板
源码描述 小编精心准备一款404错误页面源码,简单实用的html错误页面模板,简单大气的页面布局,可以使用到不同的网站中,相信大家一定会喜欢的 效果预览 源码下载 https://www.qqmu.com/3375.html...

AI程序员来了,大批码农要失业
根据GitHub发布的《Octoverse 2021年度报告》,2021年中国有755万程序员,排名全球第二。 ChatGPT的出现,堪比在全球互联网行业点燃了一枚“核弹”,很多人都会担心“自己的工作会不会被AI取代”。 而2024年的AI进展速度如火箭般&am…...

车联网安全入门——CAN总线模糊测试
文章目录 车联网安全入门——CAN总线模糊测试介绍主要特点使用场景 模糊测试(Fuzz Testing)CAN 总线模糊测试(CAN Packet Fuzzing)主要步骤工具和软件主要目标 Can-Hax安装使用获得指纹模糊测试 SavvyCAN 总结参考 车联网安全入门…...
—预编译模式下占位符动态排序字段失效)
JDBC常见异常(10)—预编译模式下占位符动态排序字段失效
场景需求 需要根据不同的列进行对应的排序操作,实现动态列名排序 类似🐟动态查询或更新 但是JDBC预编译模式下占位符的排序字段失效 SQL语句 分页查询 select * from (select t.*, rownum rn from(select * from emp order by empno desc) t where …...

爬虫入门教程:爬虫概述
在数字化时代,数据已经成为我们生活和工作中不可或缺的一部分。而如何高效、准确地获取这些数据,成为了许多领域面临的共同问题。今天,我们就来一起探讨一下爬虫技术,这个能够自动从互联网上抓取信息的神奇工具。 一、什么是爬虫…...

【工具】windows下VMware17解锁mac安装选项(使用unlocker427)
目录 0.简介 1.环境 2.安装前后对比 3.详细安装过程 3.1 下载unlocker427 1)下载地址 2)下载unlocker427.zip 3)解压之后是这样的 4)复制iso中的两个文件到你本地的VMware的安装目录下 5)复制windows下的所有…...

JS 自测题 —— 手写 class
现有三种菜单:button 类型,select 类型,modal 类型。 共同特点 title icon 属性isDisabled 方法(可直接返回 false)exec 方法,执行菜单的逻辑 不同 button 类型,执行 exec 时打印 helloselect …...
:使用YOLOV8和KerasCV进行高效的图像物体识别)
Keras深度学习框架实战(7):使用YOLOV8和KerasCV进行高效的图像物体识别
1、绪论 1.1 KerasCV简介 KerasCV是一个专注于计算机视觉任务的模块化组件库,基于Keras构建,可与TensorFlow、JAX或PyTorch等框架配合使用。 概念与定位: KerasCV是Keras API的水平扩展,提供了一系列新的第一方Keras对象&#x…...

Django视图层探索:GET/POST请求处理、参数传递与响应方式详解
系列文章目录 Django入门全攻略:从零搭建你的第一个Web项目Django ORM入门指南:从概念到实践,掌握模型创建、迁移与视图操作Django ORM实战:模型字段与元选项配置,以及链式过滤与QF查询详解Django ORM深度游ÿ…...
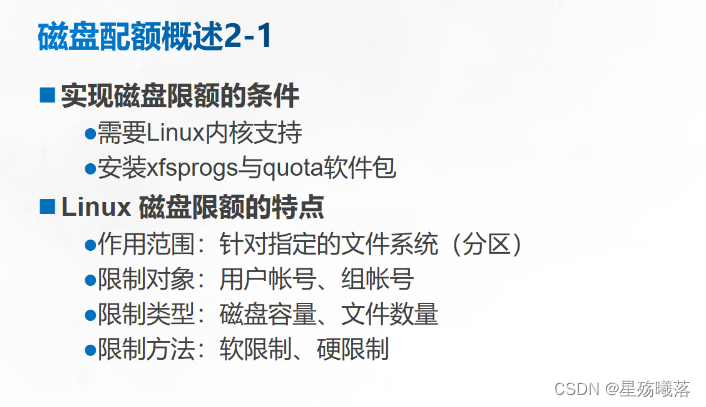
磁盘配额的具体操作
磁盘配额: linux的磁盘空间有两个方面:第一个是物理空间,也就是磁盘的容量 第二个inode号耗尽,也无法写入 linux根分区:根分区的空间完全耗尽,服务程序崩溃,系统也无法启动了。 为了防止有人…...

STM 32_HAL_SDIO_SD卡
STM32的SDIO(Secure Digital Input Output) 接口是一种用于SD卡和MMC卡的高速数据传输接口。它允许STM32微控制器与多种存储卡和外设进行通信,支持多媒体卡(MMC卡)、SD存储卡、SDI/O卡和CE-ATA设备。STM32的SDIO控制器…...
人脸识别系统之动态人脸识别
二.动态人脸识别 1.摄像头人脸识别 1.1.导入资源包 import dlib import cv2 import face_recognition from PIL import Image, ImageTk import tkinter as tk import os注:这些导入语句允许您在代码中使用这些库和模块提供的功能,例如创建…...
: 获取并绘制JSON标注文件目标区域(可单独保存目标小图))
Opencv实用笔记(一): 获取并绘制JSON标注文件目标区域(可单独保存目标小图)
文章目录 背景代码 背景 如果我们想要根据json标注文件,获取里面的指定目标的裁剪区域,那么我们可以根据以下代码来实现(也可以校验标注情况)。 代码 from tqdm import tqdm import os, json, cv2, copy import numpy as npdef…...

LabVIEW在高校电力电子实验中的应用
概述:本文介绍了如何利用LabVIEW优化高校电力电子实验,通过图形化编程实现参数调节、实时数据监控与存储,并与Simulink联动,提高实验效率和数据处理能力。 需求背景高校实验室在进行电机拖动和电力电子实验时,通常使用…...

rtsp python实现
1. rtsp rtp rtcp https://hope-wisdom.blog.csdn.net/article/details/138259027 2.rtsp加速 https://mp.weixin.qq.com/s/0C1b-8pFw0HaE1xpNbrxxw 3. 实现了一部分获取数据 import socket import base64 import threading import struct# 定义 RTSP 请求 def send_rtsp_…...

PromptSource批量操作工具:一次性修改数百个提示模板的技巧
PromptSource批量操作工具:一次性修改数百个提示模板的技巧 【免费下载链接】promptsource Toolkit for creating, sharing and using natural language prompts. 项目地址: https://gitcode.com/gh_mirrors/pr/promptsource PromptSource是一个强大的自然语…...
)
第四天(实习无忧)
##文件结束的判定,编译与链接##1.文件结束的判定:fgetc(pf)读取结束返回EOF,fgets(arr,100,pf)读取结束返回NULL,fread(arr,sizeof(int),n,pf)读取结束返回对应的n。而成功读取到文件尾结束可以用feof(pf)判断,若中途因…...
✅)
计算机毕业设计:Python中国地铁网络智能分析系统 Flask框架 数据分析 可视化 高德地图 数据挖掘 机器学习 爬虫(建议收藏)✅
博主介绍:✌全网粉丝10W,前互联网大厂软件研发、集结硕博英豪成立工作室。专注于计算机相关专业项目实战6年之久,选择我们就是选择放心、选择安心毕业✌ > 🍅想要获取完整文章或者源码,或者代做,拉到文章底部即可与…...

CentOS7服务器流量飙升?别慌,用iftop+nload五分钟定位‘吃流量’的进程
CentOS7服务器流量飙升?五分钟精准定位异常进程的侦探手册 凌晨三点,手机突然响起刺耳的告警声——服务器流量激增300%。这不是演习,而是一场真实的运维战役。本文将带你化身"流量侦探",用iftop和nload这对黄金组合&…...

用C++实现LBM格子玻尔兹曼方法MRT模拟加热气泡脱离
lbm格子玻尔兹曼方法mrt模拟加热气泡脱离c代码最近在研究流体力学相关的模拟,其中LBM(格子玻尔兹曼方法)的MRT(多松弛时间)模型在模拟加热气泡脱离这类复杂现象时展现出独特的优势。今天就来和大家分享一下如何用C 实现…...

实测Qwen-Image-Edit-2511:输入一张图,输出360°环绕视角,效果太强了
实测Qwen-Image-Edit-2511:输入一张图,输出360环绕视角,效果太强了 1. 引言:单图变多视角的技术突破 想象一下,你只需要一张普通的商品照片,就能自动生成360度全方位的展示效果。这不是科幻电影里的场景&…...

新谈设计模式 Chapter 05 — 原型模式 Prototype
Chapter 05 — 原型模式 Prototype灵魂速记:复印机——照着原件复制一份,省得从头再造。秒懂类比 你有一份精心排版的简历模板。每次投不同公司,你不是从头写一份新的,而是复印一份,改几个字。 原型模式就是这个"…...

Ardyno库:Dynamixel伺服电机的嵌入式底层通信框架
1. Ardyno库概述:面向Dynamixel伺服电机的嵌入式控制框架Ardyno是一个专为嵌入式平台设计的轻量级C/C库,用于精确、可靠地控制Robotis公司系列Dynamixel智能伺服电机(如AX-12A、MX-28、XL-320、XH430、XM430等)。其核心价值不在于…...

储能变流器双向软开关设计:从拓扑选型到控制策略的工程实现
一、储能PCS的技术挑战与设计目标1.1 储能系统的核心需求储能变流器(PCS)是实现电池与电网之间能量双向流动的关键设备,在充电模式下将电网交流电转换为直流电为电池充电,在放电模式下将电池直流电转换为交流电馈入电网或供给负载…...

为什么很多实时图表方案会失败?
在监控系统、IoT设备平台、金融行情等场景中,“实时数据可视化”已经成为前端的核心能力之一。很多开发者在 React 项目中尝试实现实时图表时,往往会遇到卡顿、延迟甚至内存增长的问题。在 React 中实现实时图表,推荐使用 Highcharts…...