Linux内核移植
内核移植
半导体厂商会从linux内核官网下载某个版本,将其移植到自己的CPU上,测试成功后就会将其开放给该半导体的厂商的CPU开发者,开发者下载其提供的linux内核,然后将其移植到自己的 产品上。
1、NXP官方开发板Linux内核编译测试
编译内核之前需要在ubuntu上安装lzop库,图形化配置工具还需要ncurses库支持,安装命令
sudo apt-get install lzop
sudo apt-get install build-essential
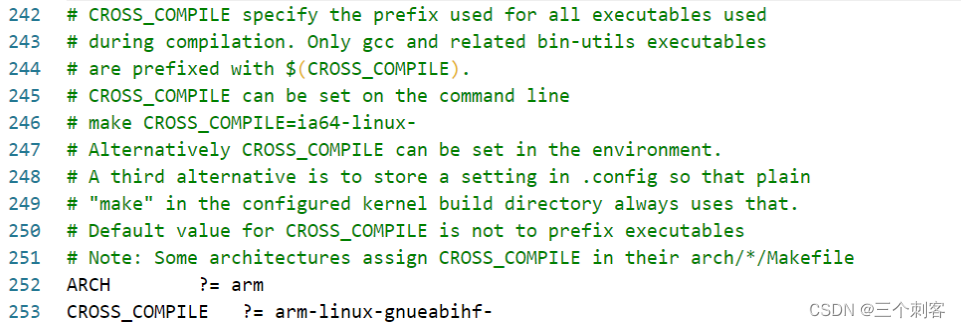
sudo apt-get install libncurses5-dev1.1、修改顶层Makefile
1.2、配置并编译Linux内核
编译Linux内核之前要先配置Linux内核。每个板子都有其对应的默认配置文件,这些配置文件保存在“arch/arm/configs”目录中。imx_v7_defconfig和imx_v7_mfg_defconfig都可以作为NXP官方开发板IMX6ULL EVK的默认配置文件,但是一般都使用后者,因为后者编译出来的zImage可以通过NXP官方提供的MfgTool工具进行烧写
make clean //第一次编译 Linux 内核之前先清理一下
make imx_v7_mfg_defconfig //配置 Linux 内核
make -j16 //编译 Linux 内核编译完成后,我们得到两个重要文件:
①、Linux 内核镜像文件:zImage。
②、NXP 官方 I.MX6ULL EVK 开发板对应的设备树文件:imx6ull-14x14-evk.dtb。
1.3、Linux内核启动测试
首先检查uboot中的环境变量bootargs
console=ttymxc0,115200 root=/dev/mmcblk1p2 rootwait rw然后拷贝zImage和imx6ull-14x14-evk.dtb到tftp目录
cp arch/arm/boot/zImage /home/mxh/linux/tftpboot/ -f
cp arch/arm/boot/dts/imx6ull-14x14-evk.dtb /home/mxh/linux/tftpboot/ -f最后启动开发板,进入uboot命令行启动
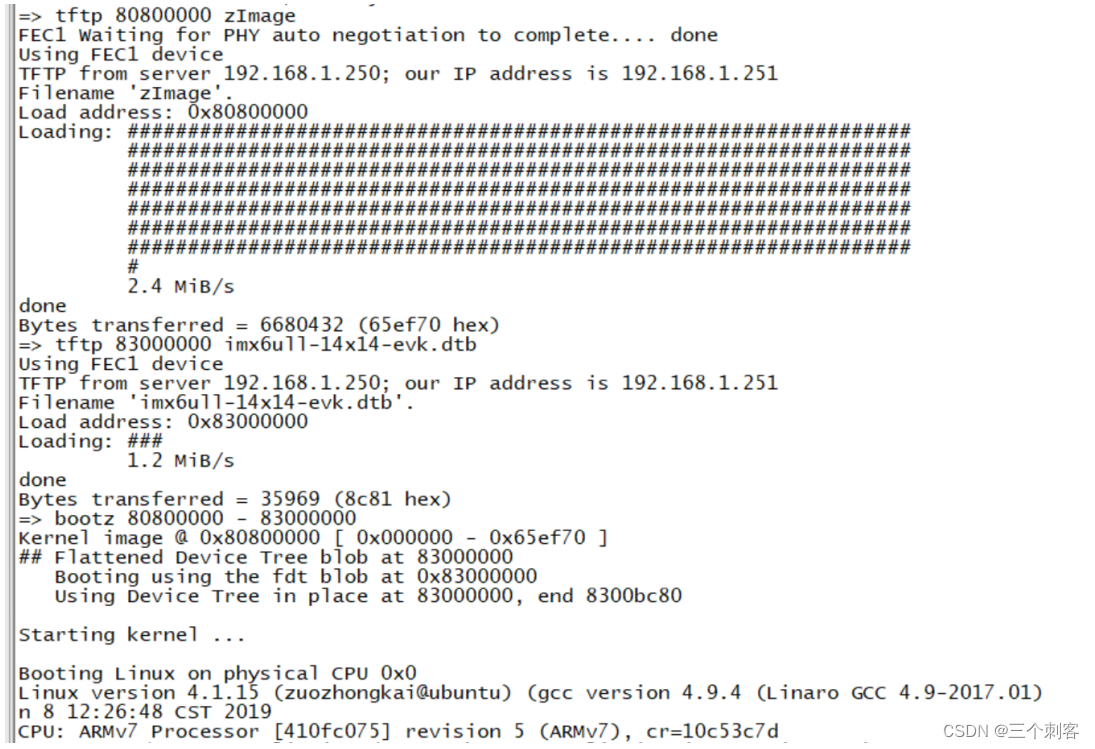
tftp 80800000 zImage
tftp 83000000 imx6ull-14x14-evk.dtb
bootz 80800000 - 83000000内核启动后,如果EMMC存在根文件系统,就可以进入到linux系统进行命令行操作
1.4、根文件系统缺失错误
如果不设置根文件系统路径或者路径设置错误,开发板从网络启动后会提示内核崩溃,VFS不能挂载文件系统
2、在Linux中添加自己的开发板
2.1、添加开发板默认配置文件
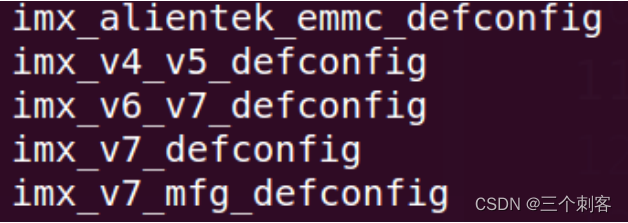
将arch/arm/configs 目 录 下 的 imx_v7_mfg_defconfig 重 新 复 制 一 份 , 命 名 为
imx_alientek_emmc_defconfig,命令如下:
cd arch/arm/configs
cp imx_v7_mfg_defconfig imx_alientek_emmc_defconfig打开 imx_alientek_emmc_defconfig 文件,找到“CONFIG_ARCH_MULTI_V6=y”这一行,
将其屏蔽掉,
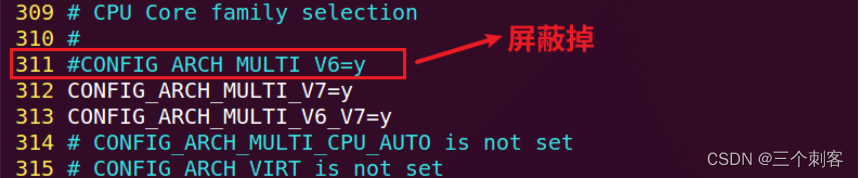
因为 I.MX6ULL 是 ARMV7 架构的,因此要屏蔽掉 V6 相关选项,否则后面做驱动实验的
时候可能会遇到驱动模块无法加载的情况。
以后 imx_alientek_emmc_defconfig 就是正点原子的 EMMC 版开发板默认配置文件了
以后就可以使用如下命令来配置正点原子 EMMC 版开发板对应的 Linux 内核了
make imx_alientek_emmc_defconfig2.2、添加开发板对应的设备树文件
进入目录 arch/arm/boot/dts 中,复制一份 imx6ull-14x14-evk.dts,然后将其重命名为 imx6ull-alientek-emmc.dts,.dts是设备树文件,编译linux的时候会将其编译成.dtb文件,命令如下:
cd arch/arm/boot/dts
cp imx6ull-14x14-evk.dts imx6ull-alientek-emmc.dts修改arch/arm/dts/Makefile文件,添加开发板设备树文件
########## arch/arm/boot/dts/Makefile代码段 ##########
dtb-$(CONFIG_SOC_IMX6ULL) += \imx6ull-14x14-ddr3-arm2.dtb \imx6ull-14x14-ddr3-arm2-adc.dtb \............imx6ull-14x14-evk-usb-certi.dtb \imx6ull-alientek-emmc.dtb \............
2.3、编译测试
我们可以创建一个编译脚本imx6ull_alientek_emmc.sh
#!/bin/sh
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihfimx_alientek_emmc_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- menuconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- all -j16执行shell脚本
chmod 777 imx6ull_alientek_emmc.sh //给予可执行权限
./imx6ull_alientek_emmc.sh //执行 shell 脚本编译内核启动开发板
tftp 80800000 zImage
tftp 83000000 imx6ull-alientek-emmc.dtb
bootz 80800000 – 830000003、CPU主频和网络驱动修改
3.1、CPU主频修改
开发板主频是792MHz,输入命令查看cpu信息
cat /proc/cpuinfo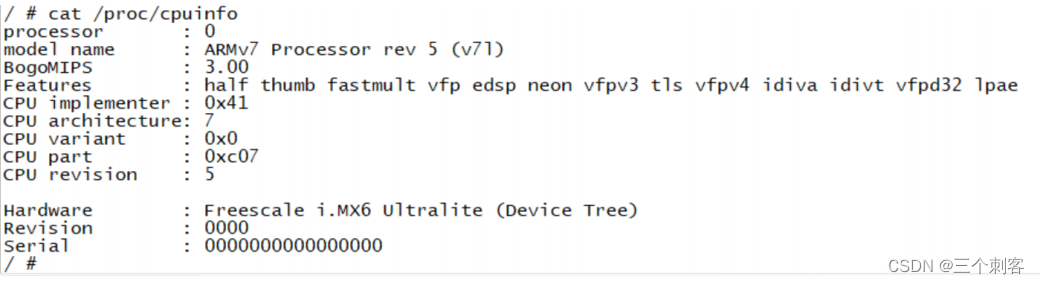
BogoMIPS 是 Linux 系统中衡量处理器运行速度的一个“尺子”,处理器性能越强,主频越高,BogoMIPS 值就越大。BogoMIPS 只是粗略的计算 CPU 性能,并不十分准确。但是我们可以通过 BogoMIPS 值来大致的判断当前处理器的性能。
3.2、使能8线EMMC驱动
IMX6UL-ALPHA开发板上的EMMC采用8位数据线,而Linux内核里的4线模式,所以可以以通过修改为8线模式来提高运行速度,直接修改设备树即可,打开imx6ull0-alientek-emmc.dts,找到如下代码
&usdhc2 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_usdhc2>;
non-removable;
status = "okay";
};修改后的代码
&usdhc2 {
pinctrl-names = "default", "state_100mhz", "state_200mhz";
pinctrl-0 = <&pinctrl_usdhc2_8bit>;
pinctrl-1 = <&pinctrl_usdhc2_8bit_100mhz>;
pinctrl-2 = <&pinctrl_usdhc2_8bit_200mhz>;
bus-width = <8>;
non-removable;
status = "okay";
};3.3、网络驱动修改
在设备树源码文件中找到如下代码段,此处SNVS_TAMPER7/8两个引脚被初始化为了SPI4的IO,所以需要删除
########## imx6ull-alientek-emmc.dts 代码段 ##########
pinctrl_spi4: spi4grp {fsl,pins = <MX6ULL_PAD_BOOT_MODE0__GPIO5_IO10 0x70a1MX6ULL_PAD_BOOT_MODE1__GPIO5_IO11 0x70a1# MX6ULL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x70a1 #删除此行# MX6ULL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x80000000 #删除此行>;
};
在设备树源码文件中找到如下代码段,此处SNVS_TAMPER7/8两个引脚被设置为了SPI4的功能IO,所以需要删除
########## imx6ull-alientek-emmc.dts 代码段 ##########
spi4 {compatible = "spi-gpio";pinctrl-names = "default";pinctrl-0 = <&pinctrl_spi4>;
# pinctrl-assert-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>; #删除此行
......
......# cs-gpios = <&gpio5 7 0>; #删除此行
};
在设备树源码文件中找到名为“iomuxc_snvs”节点,在里面添加网络复位引脚配置信息
########## imx6ull-alientek-emmc.dts 代码段 ##########
&iomuxc_snvs {pinctrl-names = "default_snvs";pinctrl-0 = <&pinctrl_hog_2>;imx6ul-evk {...... ......# enet1 复位配置pinctrl_enet1_reset: enet1resetgrp {fsl,pins = <# used for enet1 reset #MX6ULL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x10B0>;};#enet2 复位配置pinctrl_enet2_reset: enet2resetgrp {fsl,pins = <# used for enet2 reset #MX6ULL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x10B0>;};};
};
在设备树源码文件中找到如下代码段,将ENET1和ENET2的网络时钟引脚的电气属性值由0x4001b031(默认值)改为0x4001b009
########## imx6ull-alientek-emmc.dts 代码段 ##########
pinctrl_enet1: enet1grp {fsl,pins = <MX6UL_PAD_ENET1_RX_EN__ENET1_RX_EN 0x1b0b0MX6UL_PAD_ENET1_RX_ER__ENET1_RX_ER 0x1b0b0MX6UL_PAD_ENET1_RX_DATA0__ENET1_RDATA00 0x1b0b0MX6UL_PAD_ENET1_RX_DATA1__ENET1_RDATA01 0x1b0b0MX6UL_PAD_ENET1_TX_EN__ENET1_TX_EN 0x1b0b0MX6UL_PAD_ENET1_TX_DATA0__ENET1_TDATA00 0x1b0b0MX6UL_PAD_ENET1_TX_DATA1__ENET1_TDATA01 0x1b0b0MX6UL_PAD_ENET1_TX_CLK__ENET1_REF_CLK1 0x4001b009 #默认值为0x4001b031>;
};pinctrl_enet2: enet2grp {fsl,pins = <MX6UL_PAD_GPIO1_IO07__ENET2_MDC 0x1b0b0MX6UL_PAD_GPIO1_IO06__ENET2_MDIO 0x1b0b0MX6UL_PAD_ENET2_RX_EN__ENET2_RX_EN 0x1b0b0MX6UL_PAD_ENET2_RX_ER__ENET2_RX_ER 0x1b0b0MX6UL_PAD_ENET2_RX_DATA0__ENET2_RDATA00 0x1b0b0MX6UL_PAD_ENET2_RX_DATA1__ENET2_RDATA01 0x1b0b0MX6UL_PAD_ENET2_TX_EN__ENET2_TX_EN 0x1b0b0MX6UL_PAD_ENET2_TX_DATA0__ENET2_TDATA00 0x1b0b0MX6UL_PAD_ENET2_TX_DATA1__ENET2_TDATA01 0x1b0b0MX6UL_PAD_ENET2_TX_CLK__ENET2_REF_CLK2 0x4001b009 #默认值为0x4001b031>;
};
在设备树源码文件中找到“fec1”和“fec2”这两个节点,修改其中的“pinctrl-0”属性值,修改后的代码如下示
########## imx6ull-alientek-emmc.dts 代码段 ##########
&fec1 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_enet1&pinctrl_enet1_reset>;phy-mode = "rmii";......status = "okay";
};&fec2 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_enet2&pinctrl_enet2_reset>;phy-mode = "rmii";......
};
在设备树源码文件中找到如下代码段,设置ENET1的LAN8720A地址(0x0),设置ENET2的LAN8720A地址(0x1),以及其他相关设置,修改后的代码如下示
########## imx6ull-alientek-emmc.dts 代码段 ##########
&fec1 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_enet1&pinctrl_enet1_reset>;phy-mode = "rmii";phy-handle = <ðphy0>;phy-reset-gpios = <&gpio5 7 GPIO_ACTIVE_LOW>; #添加了ENET1复位引脚,低电平有效phy-reset-duration = <200>; #复位低电平持续时间为200msstatus = "okay";
};&fec2 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_enet2&pinctrl_enet2_reset>;phy-mode = "rmii";phy-handle = <ðphy1>;phy-reset-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>; #添加了ENET2复位引脚,低电平有效phy-reset-duration = <200>; #复位低电平持续时间为200msstatus = "okay";mdio {#address-cells = <1>;#size-cells = <0>;ethphy0: ethernet-phy@0 { #ethernet-phy@后面的数字式PHY的地址compatible = "ethernet-phy-ieee802.3-c22";#表明PHY芯片是SMSC公司的,Linux内核会找到SMSC的PHY芯片驱动来驱动LAN8720Asmsc,disable-energy-detect; reg = <0>; #也表示PHY地址};ethphy1: ethernet-phy@1 { #ethernet-phy@后面的数字式PHY的地址compatible = "ethernet-phy-ieee802.3-c22";#表明PHY芯片是SMSC公司的,Linux内核会找到SMSC的PHY芯片驱动来驱动LAN8720Asmsc,disable-energy-detect;reg = <1>;};};
};
要 在 I.MX6ULL 上 使 用 LAN8720A , 需 要 修 改 一 下 Linux 内 核 源 码 , 打 开
drivers/net/ethernet/freescale/fec_main.c,找到函数 fec_probe,在 fec_probe 中加入如下代码
static int fec_probe(struct platform_device *pdev)
{struct fec_enet_private *fep;struct fec_platform_data *pdata;struct net_device *ndev;int i, irq, ret = 0;struct resource *r;const struct of_device_id *of_id;static int dev_id;struct device_node *np = pdev->dev.of_node, *phy_node;int num_tx_qs;int num_rx_qs;/* 设置 MX6UL_PAD_ENET1_TX_CLK 和 MX6UL_PAD_ENET2_TX_CLK* 这两个 IO 的复用寄存器的 SION 位为 1,以下为添加的代码 */void __iomem *IMX6U_ENET1_TX_CLK;void __iomem *IMX6U_ENET2_TX_CLK;IMX6U_ENET1_TX_CLK = ioremap(0X020E00DC, 4);writel(0X14, IMX6U_ENET1_TX_CLK);IMX6U_ENET2_TX_CLK = ioremap(0X020E00FC, 4);writel(0X14, IMX6U_ENET2_TX_CLK);......return ret;
}
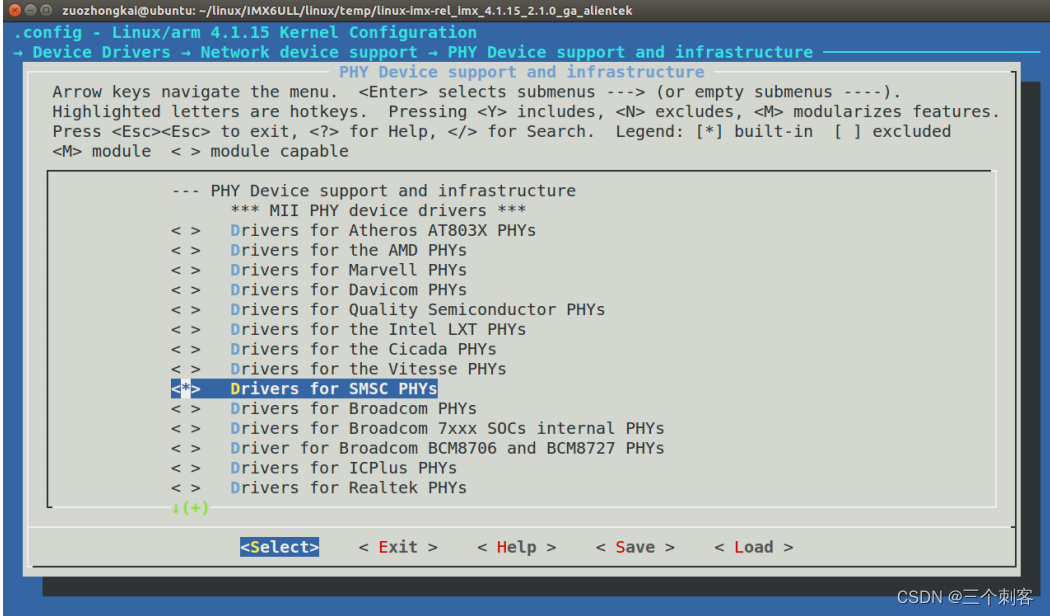
输入“make menuconfig”,打开图形化配置解密,选择使能LAN8720A的驱动,路径如下
-> Device Drivers -> Network device support -> PHY Device support and infrastructure -> Drivers for SMSC PHYs
在 Linux 中对 LAN8720A 进行一次软复位,找到LAN8720A的驱动文件 “drivers/net/phy/smsc.c”,在函数“smsc_phy_reset”中添加LAN8720A复位代码,修改后的代码如下
static int smsc_phy_reset(struct phy_device *phydev){int err, phy_reset;int msec = 1;struct device_node *np;int timeout = 50000;if(phydev->addr == 0) /* 获取FEC1网卡对应的设备节点 */ {np = of_find_node_by_path("/soc/aips-bus@02100000/ethernet@02188000");if(np == NULL) {return -EINVAL;}}if(phydev->addr == 1) /* 获取FEC2网卡对应的设备节点 */ {np = of_find_node_by_path("/soc/aips-bus@02000000/ethernet@020b4000");if(np == NULL) {return -EINVAL;}}//从设备树中获取复位时间err = of_property_read_u32(np, "phy-reset-duration", &msec);/* A sane reset duration should not be longer than 1s */if (!err && msec > 1000)msec = 1;//从设备树中获取复位IOphy_reset = of_get_named_gpio(np, "phy-reset-gpios", 0);if (!gpio_is_valid(phy_reset))return;//设置PHY的复位IO,复位LAN8720Agpio_direction_output(phy_reset, 0);gpio_set_value(phy_reset, 0);msleep(msec);gpio_set_value(phy_reset, 1);int rc = phy_read(phydev, MII_LAN83C185_SPECIAL_MODES);if (rc < 0)return rc;/* If the SMSC PHY is in power down mode, then set it* in all capable mode before using it.*/if ((rc & MII_LAN83C185_MODE_MASK) ==MII_LAN83C185_MODE_POWERDOWN) {/* set "all capable" mode and reset the phy */rc |= MII_LAN83C185_MODE_ALL;phy_write(phydev, MII_LAN83C185_SPECIAL_MODES, rc);}//未修改之前在上面的函数里面,只有Powerdown模式时才会软复位LAN8720A//此处将其移出来,这样每次调用smsc_phy_reset函数,LAN8720A都会被软复位phy_write(phydev, MII_BMCR, BMCR_RESET);/* wait end of reset (max 500 ms) */do {udelay(10);if (timeout-- == 0)return -1;rc = phy_read(phydev, MII_BMCR);} while (rc & BMCR_RESET);return 0;
}
因为smsc_phy_reset函数中用到了gpio_direction_output和gpio_set_value函数,所以需要在“smsc.c”中添加如下头文件
#include <linux/of_gpio.h>
#include <linux/io.h>网络驱动测试:修改好设备树和内核后重新编译,下载并启动开发板后,使用如下步骤进行测试
输入"ifconfig -a"来查看开发板中存在的网卡
输入"ifconfig eth0 up"和"ifconfig eth1 up"命令,打开eth0(ENET2)和eth1(ENET1)
使用"ifconfig eth0 192.168.10.51"和"ifconfig eth0 192.168.10.52"命令,配置网卡IP地址。配置成功后,ping以下Ubuntu主机(192.168.10.100),ping成功说明网络驱动修改成功
4、内核移植总结
一般情况下,设计自已的硬件时都会参考半导体厂商官方的开发板
在半导体厂商维护的Linux内核中查找可以参考的板子(半导体厂商官方开发板)
编译出参考板子对应的zImage和.dtb文件,尝试在自已的板子上启动
大部分情况下会启动起来,如果不能的话就需要调试Linux内核
修改相应的驱动,NAND/EMMC/SD卡等,内核已经提供,重点是网络驱动,需要根据自已的外设PHY芯片设置复位引脚、地址信息等
Linux内核启动以后需要根文件系统,如果没有的话系统会崩溃
相关文章:
Linux内核移植
内核移植半导体厂商会从linux内核官网下载某个版本,将其移植到自己的CPU上,测试成功后就会将其开放给该半导体的厂商的CPU开发者,开发者下载其提供的linux内核,然后将其移植到自己的 产品上。1、NXP官方开发板Linux内核编译测试编…...

忆享科技优化入职培训加强人效管理全面迎接新挑战
-优化入职培训-忆享科技加强人效管理入职培训课程 ✦ KPI系统上线 ✦ 砥砺前行前言许多企业随着自身的不断发展,对于各类人才引进需求也越来越迫切,一批批新员工的加入,公司规模逐渐扩大,给公司带来了全新的血液。但在大量新员工加…...

Spring——注解开发依赖注入和管理第三方bean
自动装配(引用类型) 环境准备: 文件结构如下图所示,Dao层的实现类里面有一个save方法,Service层里面的实现类有一个BookDao的声明和一个set方法,同时也有一个save方法,配置类的扫描范围如图所示 在当前的一个测试类当…...
)
shell可能考你但是不常用的基础($篇)
前言 当你面试的时候,可能要说的架构什么都准备好了,也说的七七八八,结果到最后问了一些基础的问题答不上来或者没想起来就很容易造成社会性死亡,一个没答上来道心被破,后面就更容易懵逼了 通常造成这个问题的原因是写…...

项目管理必备:如何绘制一份优秀的甘特图?
本文一共分为两部分—— 分享60Excel甘特图模板,简单省事儿分享两种甘特图制作教程,高效快捷 第一部分——60甘特图模板 分享一些项目管理甘特图的模板,省事儿!高效!简单! Excel甘特图表模板自取…...
【点云学习】多时相激光雷达点云
多时相雷达数据(multi-tempral LiDAR data) 1 一种多时相激光雷达数据建筑物变化检测方法-汪承义(2013) 背景:空间分辨率的提高引入了“类内可分性”增加与“类间可分性”降低;遮挡与阴影的存在使问题变得…...

使用QT C++编写一个随机生成网络ip地址的程序
根据网络搜索结果,使用QT C编写一个随机生成网络ip地址的程序的示例代码可能如下: cpp #include <QCoreApplication> #include <QRandomGenerator> #include <QDebug> int main(int argc, char *argv[]) { QCoreApplication a(a…...

Web前端学习:章三 -- JavaScript预热(三)
六九:函数的变量提升 函数的变量提升没有var高,var是最高的。 先提var,再提函数 解析: 1、4行打印之前没有定义变量,预解析触发变量提升 2、先提var,再提函数。所以先把var提升到最上面,然后提…...

java实用小技巧:判断list是否有重复项
在项目中经常会遇到这样的场景,就是一个list,根据某种规则,我要去判断里面是不是有重复的项。 难度不高,但有点烦,所以专门开一篇文章来记录一下,争取弄一个相对简洁的写法。 先看一个简单的例子…...
)
SQL优化常用招数(上)
文章目录 一、查询SQL尽量不要使用select *,而是具体字段二、避免在where子句中使用 or 来连接条件三、尽量使用数值替代字符串类型四、使用varchar代替char五、技术延伸,char与varchar2的区别?六、where中使用默认值代替null七、避免在where子句中使用!=或<>操作符八…...

C++并发之探索编程三
文章目录1. 等待事件或等待其他条件1.1 凭借条件变量等待条件成立1.1.1 std::condition_variable1.1.2 std::condition_variable_any1.1.3 std::condition_variable和std::condition_variable_any之间的区别上个章节我们讨论了如何对共享数据的一个保护,通过std::lo…...

某智能驾驶企业:CACTER云网关为O365系统护航
01 客户背景 某智能驾驶企业是一家国际性的高科技创新型企业,在智能驾驶领域处于全球领先地位,专注于为广大客户提供个性化的智能驾驶解决方案,共建美好智能新时代。 使用产品:CACTER邮件安全云网关 02 痛点难点问题 根据Corema…...

网络安全与信息安全的主要区别讲解-行云管家
生活中工作中,我们经常可以听到信息安全与网络安全这两个词语,但很多小伙伴对于两者区分不清楚,今天我们小编就给大家来简单讲解一下这两者的主要区别吧! 网络安全与信息安全的主要区别讲解 1、定义不同 网络安全是指网络系统的…...

Zabbix6.2利用模板和自定义监控项监控华为AR3260路由器
1:登录路由器的WEB管理控制台。在系统管理中找到SNMP然后开启SNMP代理,SNMP的版本可以只选择v2c都选择也无所谓,然后点击新建一个团体。 2:团体名称输入默认的public即可,在WEB端显示的是乱码,但是不影响使…...

MySQL Connector/C++使用过程中的问题
Linux环境下,使用mysql connector cpp的时候,链接的时候报错: /usr/bin/ld: warning: libssl.so.10, needed by /usr/lib64/libssh2.so.1, may conflict with libssl.so.1.1 /usr/bin/ld: ext/openssl/.libs/xp_ssl.o: undefined reference …...

SpringBoot下的Spring——DAY04——动态代理总结、AOP、自定义注解进行拦截、动态获取注解参数、通知方法(内含源代码)
SpringBoot下的Spring——DAY04——动态代理总结、AOP、自定义注解进行拦截、动态获取注解参数、通知方法(内含源代码) 源代码下载链接地址:https://download.csdn.net/download/weixin_46411355/87549575 目录SpringBoot下的Spring——DAY0…...

Spark MLlib概述
Spark MLlib概述机器学习房价预测模型选型数据探索数据提取准备训练样本模型训练模型效果评估机器学习 机器学习的过程 : 基于历史数据,机器会根据一定的算法,尝试从历史数据中挖掘并捕捉出一般规律再把找到的规律应用到新产生的数据中,从而…...
Git 命令行5步解决冲突方法(亲测有效)
总体步骤如下: git pull --rebase 解决冲突文件 file1.c。git add file1.cgit commit -m "*****" git pushgit rebase --continue ,此时冲突消失强推,git push origin xxxx -f 本人解决的例子如下: 第一步、拉取…...

在线帮助文档——让用户更方便地获取帮助
在当今互联网时代,人们在使用各种产品或服务时,难免会遇到问题或疑问,需要寻求帮助。而在线帮助文档则成为了一种方便、快捷、高效的解决问题的方式。Baklib作为一款优雅的云知识库构建平台,可以帮助公司在线制作各种类型的帮助文…...

一小时轻松掌握Git,看这一篇就足够
文章目录序言:版本控制分类一、Git环境配置下载卸载安装二、常用linux命令三、基本配置四、Git基本操作0.原理图1.项目创建及克隆方式一:本地仓库搭建方式二:克隆远程仓库2.文件操作3.配置ssh公钥4.分支5.push代码参考序言:版本控…...

购买腾讯云时最容易被忽略的痛点:配置、成本和运维闭环
很多客户在购买腾讯云或开始使用腾讯云时,真正的痛点往往不是“不会下单”,而是下单前后缺少一套清晰的决策和运维闭环。第一个痛点是配置选择不确定。不少团队会先纠结 CPU、内存、带宽、地域、系统盘和数据盘怎么选。配置买低了担心业务跑不动…...

现在的人为什么不焦虑了!
就拿我来说吧!现在你努力没有方向,焦虑只能让自己的什么出现问题,晚上睡不好的,伴随着偏头疼,是在是太难了。 !、而且回过头来看我们真的需要那么多消费吗?消费降一点,吃踏实点&…...

改进人工势场多无人机三维航迹规划【附代码】
✨ 长期致力于航迹规划、多无人机、目标分配、人工势场算法、三维空间研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)多目标任务分配与人工势场基础&…...

NotebookLM笔记整理实战指南:5步打造自动关联知识图谱的智能笔记系统
更多请点击: https://intelliparadigm.com 第一章:NotebookLM笔记整理实战指南:5步打造自动关联知识图谱的智能笔记系统 NotebookLM 是 Google 推出的面向研究者与开发者的第一方 AI 笔记工具,其核心能力在于基于用户上传文档构建…...

在Serv00共享主机上部署SOCKS5代理:原理、部署与优化指南
1. 项目概述与核心价值最近在折腾一些需要稳定网络连接的自托管服务时,遇到了一个经典难题:如何在资源受限的共享主机环境里,搭建一个轻量、稳定且可控的网络代理通道。这让我想起了之前在社区里看到的一个项目——cmliu/socks5-for-serv00。…...

5分钟终极指南:如何免费激活Windows和Office的完整解决方案
5分钟终极指南:如何免费激活Windows和Office的完整解决方案 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows系统未激活的提示而烦恼吗?或者Office办公软件显…...

为OpenClaw智能体工作流配置Taotoken作为核心模型提供商
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为OpenClaw智能体工作流配置Taotoken作为核心模型提供商 OpenClaw是一个流行的智能体开发框架,它允许开发者构建和编排…...

观察Taotoken在多模型并发调用时的延迟表现与稳定性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察Taotoken在多模型并发调用时的延迟表现与稳定性 在构建复杂的AI应用时,开发者常常需要同时或交替调用多个不同的大…...

STM32 PID温度控制系统:实现±0.5°C高精度控制的完整指南
STM32 PID温度控制系统:实现0.5C高精度控制的完整指南 【免费下载链接】STM32 项目地址: https://gitcode.com/gh_mirrors/stm322/STM32 你是否曾面临温度控制系统的精度不足、响应迟缓或稳定性差的困扰?在工业自动化、实验室研究和智能家居领域…...

Pycharm更新骨架卡死C盘?罪魁祸首是torch-geometric的四个依赖库
PyCharm更新骨架卡死C盘?深入解析torch-geometric依赖库的存储陷阱 当你在PyCharm中启动一个包含torch-geometric的项目时,是否经历过C盘空间被神秘吞噬的噩梦?那个名为"Updating skeletons"的后台进程,本应是IDE的贴心…...