基于STM32的位置速度环PID控制伺服电机转动位置及程序说明
PID控制原理
PID控制原理是一种广泛应用于工业自动化和其他领域的控制算法。PID控制器的名字来源于其三个主要组成部分:比例(Proportional)、积分(Integral)和微分(Derivative)。PID控制器实现的是输入信号和期望信号的零误差。比例控制就是对误差成比例放大,让输出信号按照线性规律接近期望值,比例控制的目的就是让输出值无限接近期望值;积分控制就是对误差随着时间的积分值按一定比例输出,让输出信号能够到达期望值,积分控制的目的就是让输出值在期望值附近振荡;微分控制就是对误差的变化按一定比例输出,微分控制的目的就是为了消除振荡,让输出信号保持稳定。完整的PID控制就是将比例控制的输出值、积分控制的输出值和微分控制的输出值加起来。让输出的信号等于期望信号,并保持稳定。
位置速度环PID原理
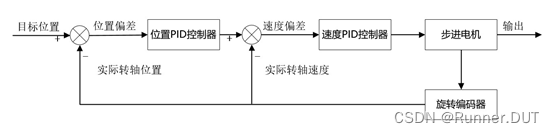
位置速度环控制如上图所示,输入信号是期望的目标位置,输出是电机的驱动信号,控制电机的旋转启停、旋转速度。通过旋转编码器作为传感器获取电机的转动情况,并经过一定的计算过程得到实际转轴的位置以及实际转轴的速度。
内环是速度环,内环的输入是速度误差,就是期望速度减去实际转轴速度,速度误差输入到速度PID控制器中经过计算得到输出值,该输出值就是对电机驱动信号的控制,电机的控制一般以PWM信号来控制,于是输出值就是PWM信号的占空比。
外环是位置环,上述内环中的期望速度其实就是外环的输出,是通过外环计算出来的而不是固定的,外环的输入是位置误差,就是期望位置减去实际转轴位置。外环的输入就是电机最终期望达到的位置。
内环和外环的关系有两点需要注意:第一点是内环的期望值,也就是输入,是外环PID计算后得到的输出;第二点是外环控制对象是内环控制对象的积分,这里外环的控制对象是实际转轴的位置,内环的控制对象是实际转轴的速度,它俩存在一个积分的关系。
代码解析
实践是检验真理的唯一标准。下面用实际使用过的代码来解释一下位置速度环PID的实现过程。
硬件方面,主控选择的是STM32单片机,电机驱动模块选择TB6612模块还有电机及编码器。软件方面,选择利用CubMX生成HAL库的工程,具体生成过程大同小异。
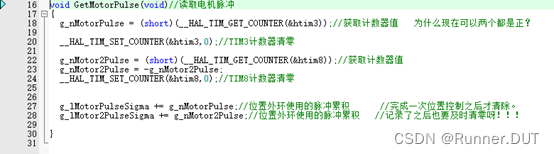
首先第一步是获取电机编码器的脉冲数,这里通过STM32内部的计数器实现。在总的定时器回调函数中,htim7是20ms的定时器,如下图所示,每20ms进入中断函数一次。

首先获取电机每20ms内电机编码器输出脉冲数。hitm3和htim8都设置为encoder mode,即定时器编码器模式,获取两个电机编码器的脉冲值。获取到的脉冲值用于计算实际转轴的位置和速度。

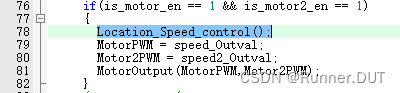
后再看总的位置速度环PID控制函数Location_Speed_control()。总的PID控制函数的关键部分包括位置环PID控制函数location_pid_control()和速度环PID控制函数speed_pid_control()。
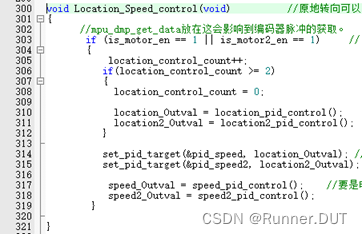
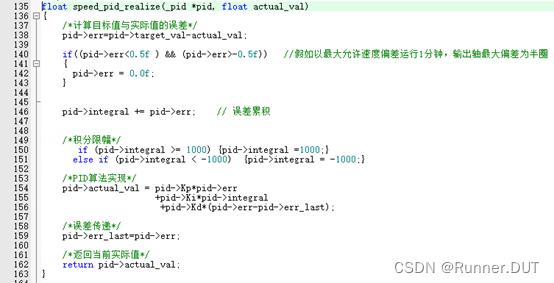
有了实际速度之后,再通过速度环PID运算函数speed_pid_realize得到PID输出控制值。该函数通过一个结构体传递目标值、误差、上一个偏差值、PID系数以及积分值等参数,这些参数中,目标值是通过位置环PID运算函数计算得到的,PID系数是要提前设置好的。
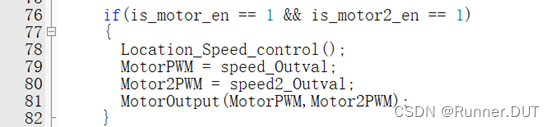
速度环PID运算函数speed_pid_realize得到PID输出控制值其实就是PWM输出。如下图所示,speed_Outval和speed2outval就是速度环PID运算函数的计算结果,它们的值传入MotorOutput电机输出函数中。
在MotorOutput电机输出函数中,主要是判断方向以及限制PWM输出上限值。
最后我们再介绍一下位置环PID控制函数location_pid_control()。该函数也需要通过编码器脉冲数先获取电机转轴实际位置。
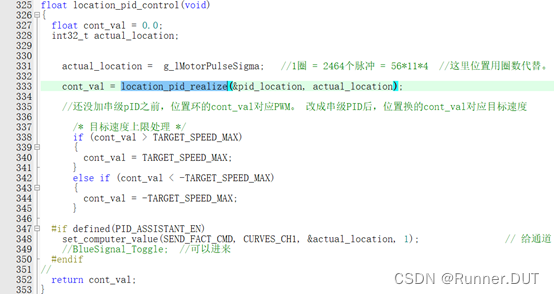
有了实际位置后,通过location_pid_realize函数调用位置PID结构体和实际位置计算得到目标速度,目标速度输出给速度环的输入,这样就完成闭环了。
其他说明
上述介绍的代码在电子设计竞赛中实际应用过,可以稳定运行,需要相关文件用于借鉴学习可以私聊。
相关文章:
基于STM32的位置速度环PID控制伺服电机转动位置及程序说明
PID控制原理 PID控制原理是一种广泛应用于工业自动化和其他领域的控制算法。PID控制器的名字来源于其三个主要组成部分:比例(Proportional)、积分(Integral)和微分(Derivative)。PID控制器实现…...

操作失败——后端
控制台观察,页面发送的保存菜品的请求 返回的response显示: ---------- 我开始查看明明感觉都挺正常,没啥错误,就是查不出来。结果后面电脑关机重启后,隔一天看,就突然可以了。我觉着可能是浏览器的缓存没…...

基于SSM的“学校访客登记系统”的设计与实现(源码+数据库+文档)
基于SSM的“学校访客登记系统”的设计与实现(源码数据库文档) 开发语言:Java 数据库:MySQL 技术:SSM 工具:IDEA/Ecilpse、Navicat、Maven 系统展示 平台架构图 系统首页 校园公告信息界面 留言板管理界面 家庭来…...

linux配置IP、子网掩码、网关
linux虚拟机配置IP、子网掩码、网关 本方法适用于 Ubuntu 18.04 之后的版本。 例1: 配置信息: IP:10.100.100.23 子网掩码:255.255.255.240 网关:10.100.100.56 1、打开网络配置文件 01-network-manager-all.yaml sudo vi /etc/netplan/01-network-…...
Java 垃圾回收
文章目录 1 Java 垃圾回收1.1 JVM1.2 Java 对象生命周期 2 如何判断一个对象可被回收2.1 引用计数算法2.2 可达性分析算法 3 垃圾回收过程3.1 总体过程3.2 为什么要进行世代垃圾回收?3.3 分代垃圾回收过程 在 C 和 C 中,许多对象要求程序员声明他们后为其…...
多客陪玩系统-开源陪玩系统平台源码-支持游戏线上陪玩家政线下预约等多场景应用支持H5+小程序+APP
多客陪玩系统-开源陪玩系统平台源码-支持游戏线上陪玩家政按摩线下预约等多场景应用支持H5小程序APP 软件架构 前端:Uniapp-vue2.0 后端:Thinkphp6 前后端分离 前端支持: H5小程序双端APP(安卓苹果) 安装教程 【商业…...

书生·浦语大模型全链路开源体系-笔记作业2
全部写成了shell脚本,可以一键执行。 笔记: 1. 环境安装(InternStudio开发机) # 1. 创建conda环境 studio-conda -o internlm-base -t demo # 2. 激活conda环境 conda activate demo # 3. 安装额外的依赖 pip install huggingface-hub0.17.3 pip inst…...

手把手教你发布你的第一个npm插件包
在开源的世界里,npm(Node Package Manager)不仅是JavaScript生态中不可或缺的一部分,也是全球最大的软件注册表,它使得分享和复用代码变得异常简单。如果你有一个很棒的想法或者实用的功能想要封装成一个npm包供他人使…...

Docker-compose 编排lnmp(dockerfile) 完成Wordpress
一、部署 Nginx 镜像 1. 建立工作目录 mkdir /opt/lnmp/nginx -pcd /opt/lnmp/nginx#上传 nginx 安装包 nginx-1.12.0.tar.gz#上传 wordpress 服务包 wordpress-4.9.4-zh_CN.tar.gz mkdir /opt/lnmp/nginx/htmltar zxvf wordpress-4.9.4-zh_CN.tar.gz -C /opt/lnmp/nginx/html…...
秋招突击——算法打卡——5/28——复习{Z字形变换、两数之和}——新做:{整数反转、字符串转整数}
文章目录 复习Z字形变换实现代码参考代码 两数之和复习代码 新作整数反转个人实现实现代码 参考做法字符串转换整数个人解法 分析总结 复习 Z字形变换 实现代码 这里使用了他的思想,但是没有用他的代码,虽然已经比上次简洁了,但是还是不够&…...
PPT设置为本框的默认格式以及固定文本框
调整文本框固定位置 双击文本框之后勾选如下三个位置 设置文本框为默认 在调整好文本框的基本性质后,设置为默认即可...

计算机基础(5)——进制与进制转换
💗计算机基础系列文章💗 👉🍀计算机基础(1)——计算机的发展史🍀👉🍀计算机基础(2)——冯诺依曼体系结构🍀👉ἴ…...

发现情绪背后的真实心理需求,选择适合你的情绪调节方式
一、教程描述 心态对人的生活质量以及身体健康等多方面,都会产生非常重要的影响,受到不良情绪的影响,人的心态也会发生一定的变化。对于处于不良情绪状态的人来讲,应该重视学会调整自己的情绪。在心理学上,人的每种情…...
代理记账公司的五大问题及其解决方案
代理记账公司是现代企业管理中不可或缺的一部分,它为企业的日常运营提供了专业、高效的服务,随着行业的发展和竞争的加剧,代理记账公司的面临的问题也日益突出,这些问题主要表现在以下几个方面: 业务流程不规范 许多代…...
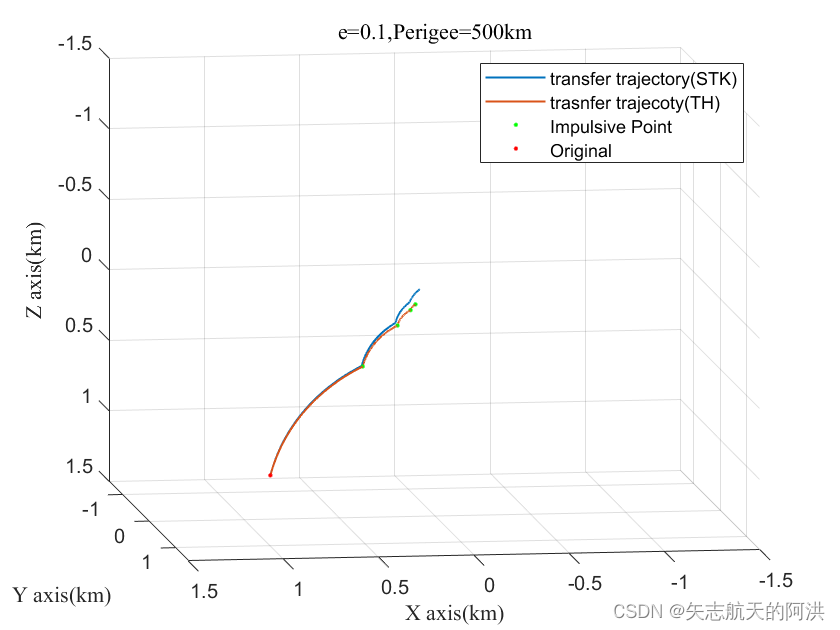
TH方程学习 (7)
一、内容介绍 TH存在广泛应用,在下面案例中,将介绍几种相对运动模型,斜滑接近模型,本节学习斜滑接近制导方法能够对接近时间、接近方向以及自主接近过程的相对速度进行控制。施加脉冲时刻追踪器的位置连线可构成一条直线…...
2024最新python入门教程|python安装|pycharm安装
前言:在安装PyCharm之前,首先需要明确PyCharm是一款功能强大的Python集成开发环境(IDE),由JetBrains公司开发。PyCharm旨在通过提供智能代码补全、语法高亮、代码检查、快速导航和重构等丰富的编码辅助工具,…...

docker架构
docker架构 Docker daemon 是Docker最核心的后台进程,它负责响应来自Dockerclient的请求,然后将这此请求翻译成系统调用完成容器管理操作。该进程会在后台后启动一个APIServer,负责接收由 Dockerclient发送的请求;接收到的请求将通…...

使用Java进行网络采集:代理IP与参数传递详解
在Java编程语言中,参数传递机制是一个常见的讨论话题。理解这一点对于编写高效且无错误的Java代码至关重要。本文将探讨Java的参数传递机制,解析其究竟是“按引用传递”还是“按值传递”,并结合网络爬虫技术的实例,展示如何在实际…...

多功能光时域反射仪的工作原理
6426A-2101多功能光时域反射仪是新一代掌上型智能化光纤通信测量仪器,具有强大的功能和广泛的应用领域。它能够显示光纤及光缆的损耗分布曲线图,测量光纤及光缆的多种关键参数,包括长度、损耗、接续质量等,为光纤通信系统的工程施…...

目标检测数据集 - 海洋垃圾检测数据集下载「包含VOC、COCO、YOLO三种格式」
数据集介绍:海洋垃圾检测数据集,真实拍摄海洋海底场景高质量垃圾检测图片数据,涉及场景丰富,比如海底塑料垃圾数据、海底铁制品罐状垃圾数据、海底纸张垃圾数据、海洋生物和海底垃圾同框数据、海底探索仪器和海底垃圾同框数据、海…...

PP-DocLayoutV3参数详解:text/title/table/figure等11类版面区域置信度解析
PP-DocLayoutV3参数详解:text/title/table/figure等11类版面区域置信度解析 1. 引言:为什么版面分析需要“置信度”? 想象一下,你拿到一份扫描的合同,想用OCR(文字识别)把它变成可编辑的电子版…...
)
告别setData!用mobx-miniprogram+miniprogram-computed重构你的小程序状态管理(保姆级避坑指南)
重构小程序状态管理:mobx-miniprogram与miniprogram-computed实战指南 如果你正在开发一个功能逐渐复杂的中大型微信小程序,大概率已经遇到了这样的困境:页面间状态共享越来越混乱,setData调用遍布各个角落,视图更新性…...

C语言浪漫玫瑰代码:用编程传递爱意的创意实践
1. 用代码绽放爱的玫瑰:程序员专属浪漫指南 当传统玫瑰花束遇上代码,会碰撞出怎样的火花?作为一名写过无数行代码的老程序员,我发现用C语言绘制玫瑰花不仅能展现技术实力,更能传递独特的情感温度。记得第一次给女友展…...

当 Go 还在追求极简时,C++ 26 却又加了四大“史诗级”新特性
大家好,我是Tony Bai。在这个 Go、Zig 等“小而美”新语言颇受青睐的时代,如果你去技术社区里问一句:“C 这门语言怎么样?”你大概率会得到一堆充满戏谑的回答:“太复杂了,别学”、“从入门到放弃”、“面试…...

WarcraftHelper:让经典魔兽争霸III在现代电脑上焕发新生的全能助手
WarcraftHelper:让经典魔兽争霸III在现代电脑上焕发新生的全能助手 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸III在宽…...

服务器很卡,是CC攻击造成的吗
之前有客户反馈,服务器有一段时间使用总是会遇到卡的情况,查看并无流量攻击的情况,程序也未进行过什么修改,用户人数也没有什么变化。来咨询是什么原因导致的。导致机器卡的情况,一般有带宽不够,硬件性能不…...

教育博主私藏!PPT生成网站实用指南
作为一名教育博主,我深刻体会到制作 PPT 是教育工作者日常工作中不可或缺的一部分。借助合适的工具,能有效降低 PPT 制作门槛,提升演示内容的专业度和吸引力。今天,就给大家分享几款亲测好用的 PPT 生成网站,助力大家高…...

8-Bit美学不妥协性能|像素剧本圣殿UI渲染与LLM推理资源隔离方案
8-Bit美学不妥协性能|像素剧本圣殿UI渲染与LLM推理资源隔离方案 1. 项目概述 像素剧本圣殿(Pixel Script Temple)是一款专为剧本创作者设计的AI辅助工具,基于Qwen2.5-14B-Instruct大模型深度微调开发。它将高性能AI推理能力与独…...
)
保姆级避坑指南:在CentOS 7上手动部署MySQL 8.0二进制包(附systemd服务配置)
CentOS 7手动部署MySQL 8.0二进制包的深度避坑指南 在Linux服务器上手动部署MySQL数据库是每个运维工程师的必修课。不同于常见的yum或apt安装方式,二进制包部署能让你更深入地理解MySQL的运行机制,同时获得更灵活的控制权。但这条路并不平坦,…...

Rust DLL注入技术深度解析:Rust-for-Malware-Development完整实现指南
Rust DLL注入技术深度解析:Rust-for-Malware-Development完整实现指南 【免费下载链接】Rust-for-Malware-Development Rust for malware Development is a repository for advanced Red Team techniques and offensive malwares & Ransomwares, focused on Rus…...