Pixhawk RPi CM4 Baseboard 树莓派CM4安装Ubuntu20.04 server 配置ros mavros mavsdk
文章目录
- 硬件
- 安装Ubuntu Server20.04
- 下载rpiboot工具
- 下载imager
- 刷写系统
- 配置USB
- 配置WIFI
- 开机安装桌面
- 配置wifi
- 配置串口
- 安装ROS
- 安装mavros
- 安装MAVSDK-Python
- Internet设置
- 最后
参考:
https://docs.holybro.com/autopilot/pixhawk-baseboards/pixhawk-rpi-cm4-baseboard
硬件
自己要买个树莓派cm4
建议是买带wifi和emmc版本的
此外袋子里面还有四个螺丝用来固定树莓派
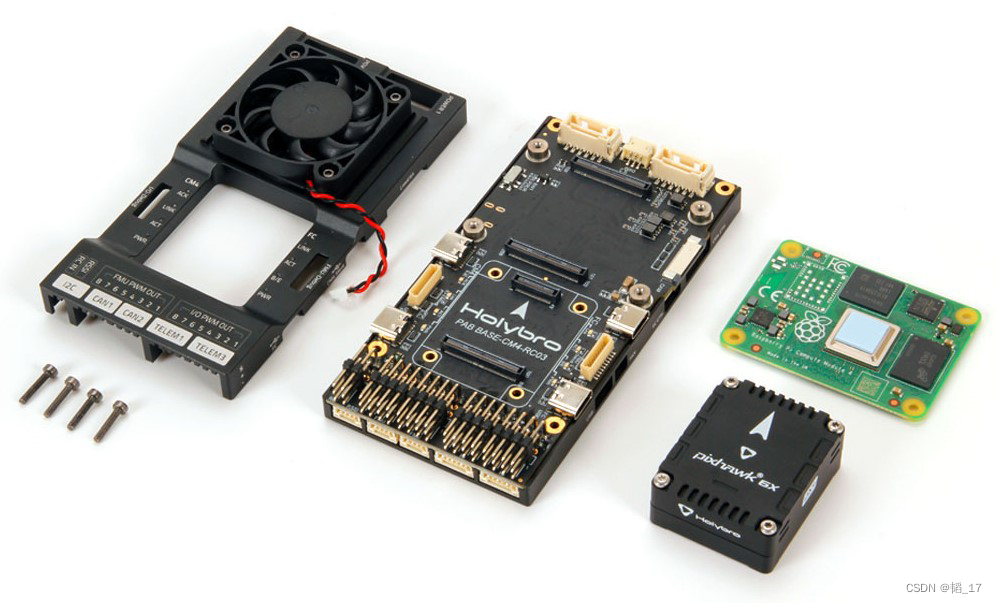
侧面有一个开关,用来切换rpi/emmc
拨到rpi,配合rpiboot可以用来刷系统
刷完了拨到emmc就正常启动系统
安装Ubuntu Server20.04
下载rpiboot工具
Linux下面
sudo apt install libusb-1.0-0-dev
git clone --depth=1 https://github.com/raspberrypi/usbboot
cd usbboot
make
sudo ./rpiboot
Windows下面
这里下载
下载imager
imager
根据系统选择
刷写系统
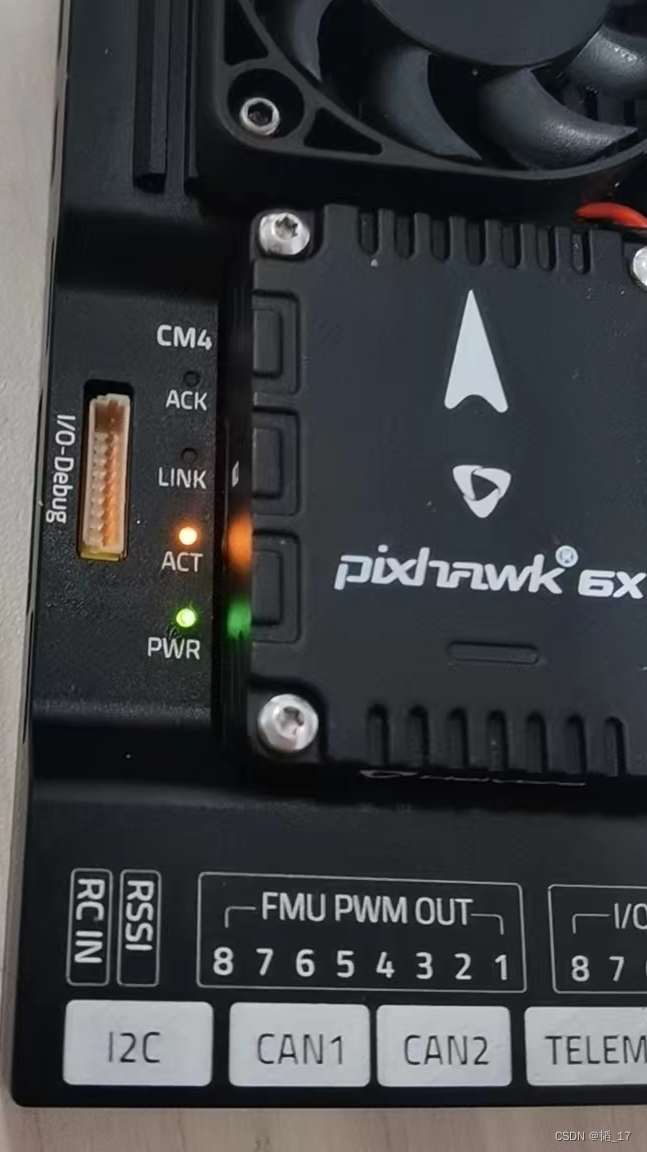
把开关拨到rpi
用usb接cm4 slave到电脑
根据Windows/Linux运行rpiboot
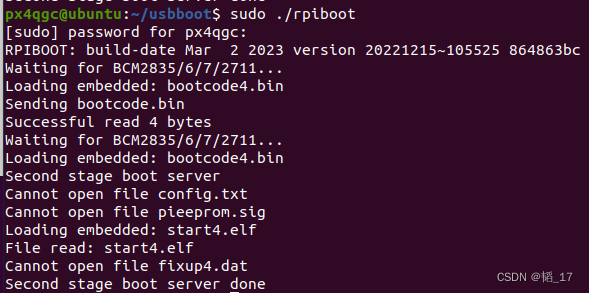
cm4一侧的ACT和PWR灯会亮
然后打开imager,general purpose,Ubuntu,选择这个系统
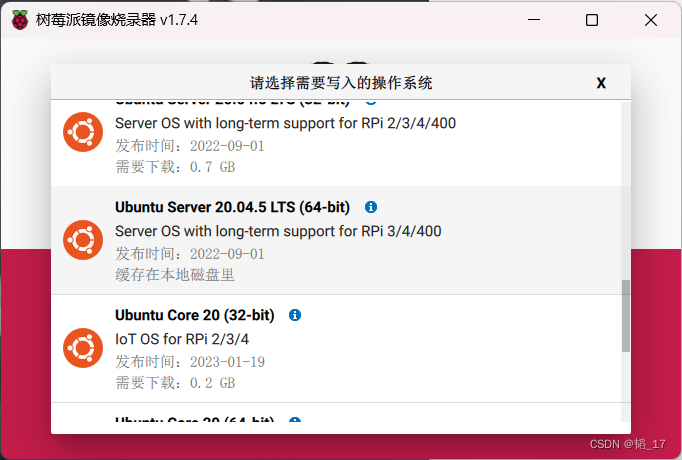
这个要下载一会,也可以在这里下载https://cdimage.ubuntu.com/releases/focal/release/
下图这个,是64位的

然后在imager里面选自定义或者custom

然后选择树莓派烧录
再点击右下角齿轮,配置ssh用户名和密码,作为Ubuntu登录的用户名密码
wifi配置无所谓,反正不好使
烧录,需要二十分钟差不多
配置USB
在Linux下面可以访问boot盘(可能要再跑一次rpiboot)
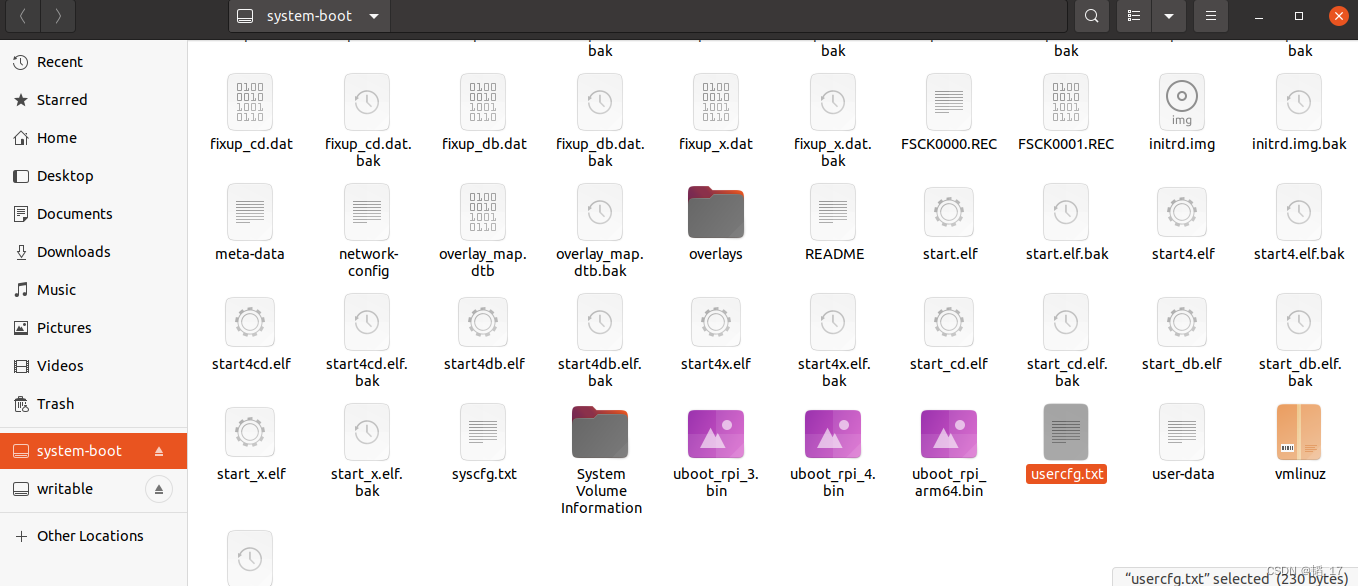
在usercfg.txt里面添加
dtoverlay=dwc2,dr_mode=host
不然usb不会启动,CM4 Host的两个Type-C口不能外接设备
配置WIFI
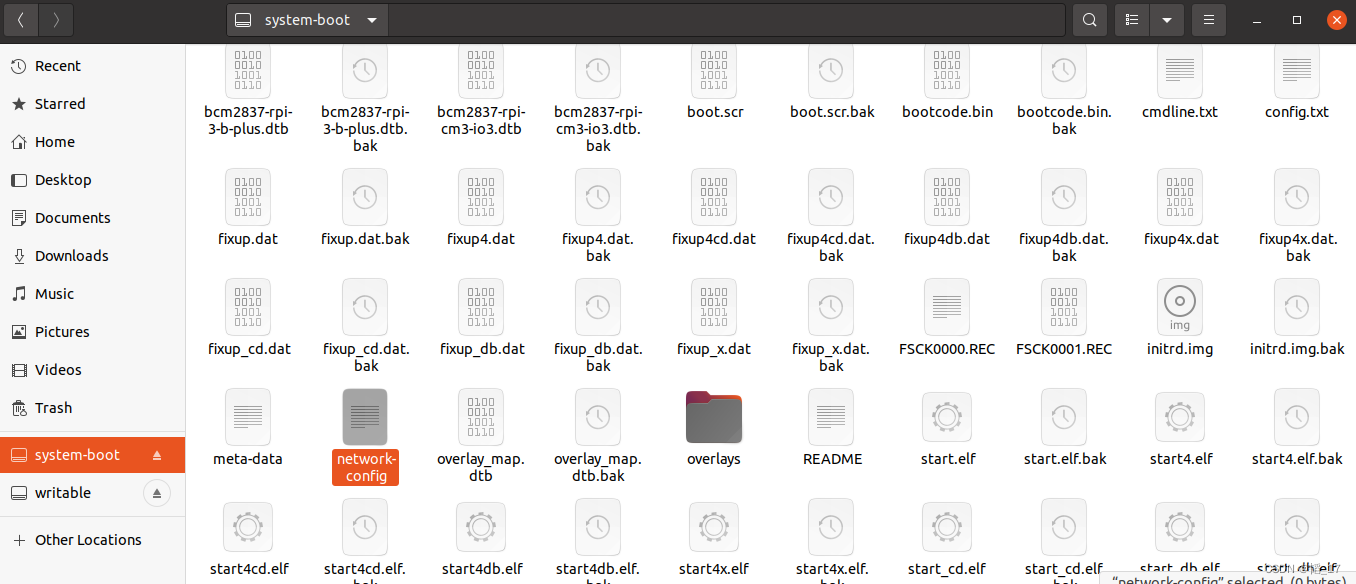
写入:
wifis:wlan0:dhcp4: trueoptional: trueaccess-points:"你wifi的名字":password: "你wifi的密码"hidden: true
如果wifi可见,hidden就删了
可以参考这俩文章:
树莓派安装Ubuntu server无屏幕开机自动连接WIFI
树莓派4B安装Ubuntu Server20.04(18.04)连接wifi(对于ubuntu server 99%适用)
其中第二篇文章很有用,安装完图形化界面后还要设置wifi
开机安装桌面
断电,把开关拨到emmc,连接micro HDMI口到显示器,然后再用usb电源插入cm4 slave(电脑可能功率不足)
此处要注意,先上电树莓派,启动后再上电fc的Type-C口给飞控和风扇供电,不然可能开机乱码
用电脑或者其他的开一个2.4G的wifi给cm4用
登录用户
安装桌面
sudo apt-get install ubuntu-desktop
然后重启,接个鼠标什么的到cm4 host
配置wifi
/etc/netplan/nano 50-cloud-init.yaml里面删干净,不然图形化界面看不到wifi列表
$ sudo netplan -debug try
$ sudo netplan -debug generate
$ sudo netplan -debug apply
$ reboot
如果用蓝牙
sudo apt-get install pi-bluetooth
配置串口
文档里面的raspi-config不好使!
所以要手动设置才行
ls -l /dev
可以看到串口列表,其中有两个是这样,目标是把他俩调换一下,serial0对应ttyAMA0

去/boot/firmware下面
找config.txt
修改:
enable_uart=1
dtoverlay=miniuart-bt.dtbo
cmdline=cmdline.txt
此处相当于用miniuart替换给了蓝牙
再找cmdline.txt
将console=ttyAMA0(或者serial0),115200的语句删除,改成这个样子
elevator=deadline net.ifnames=0 dwc_otg.lpm_enable=0 console=tty1 root=LABEL=writable rootfstype=ext4 rootwait fixrtc quiet splash
此处相当于关掉了串口的console
然后重启,就变换了

查看串口配置
stty -F /dev/ttyAMA0 -a #ttyAMA0为要查看的串口
配置串口
stty -F /dev/ttyAMA0 ispeed 921600 ospeed 921600 cs8
更改串口的权限,username可以在terminal输入whoami查看
sudo usermod -aG dialout username
可以安装一个cutecom,如果不用sudo就能打开这个串口,就证明配置好了
安装ROS
先在~/.bashrc里面配置代理,代理自寻,不然ros安装就是噩梦
export https_proxy=http://127.0.0.1:7890
export http_proxy=http://127.0.0.1:7890
export all_proxy=socks5://127.0.0.1:7890
继续安装
# 添加ros软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'# 如果没有安装curl
sudo apt install curl# 设置密钥
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -# 更新软件源
sudo apt update# 安装ros
sudo apt install ros-noetic-desktop-full# 设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc# 运行该脚本,让环境变量生效
source ~/.bashrc# 安装开发ROS必要的package
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential# 初始化
sudo rosdep init
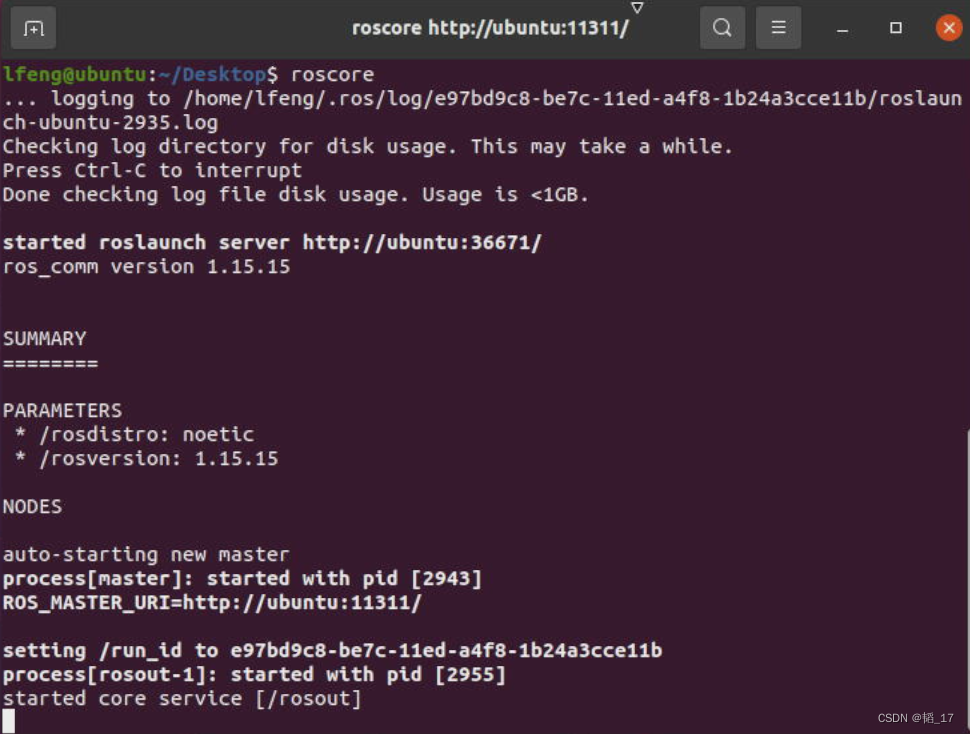
rosdep update
运行roscore能得到下面这个就成功了
安装mavros
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras //安装MAVROS
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
sudo bash ./install_geographiclib_datasets.sh
参考文档配置pixhawk6x的telem2
- MAV_1_CONFIG: 102
- MAV_1_MODE: 2
- SER_TEL2_BAUD: 921600
运行mavros
roslaunch mavros px4.launch fcu_url:="/dev/ttyAMA0:921600"
得到
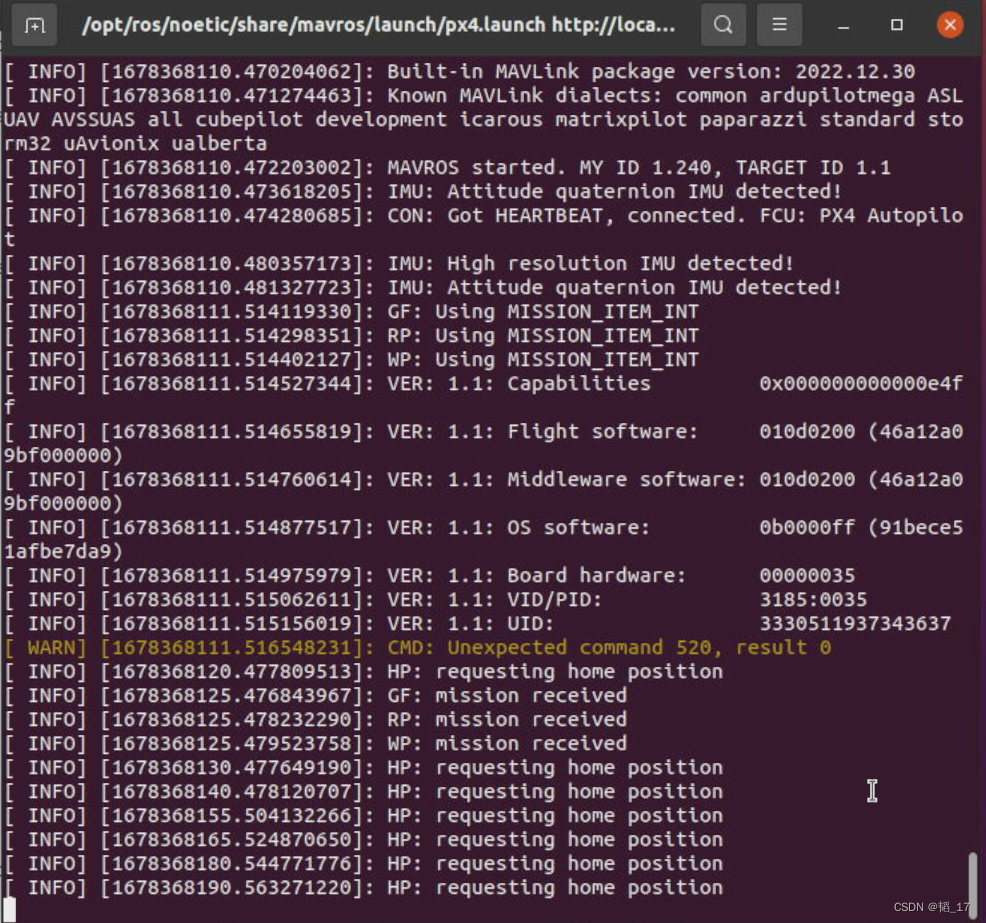
安装MAVSDK-Python
python3 -m pip install mavsdk
https://github.com/mavlink/MAVSDK-Python.git
cd MAVSDK-Python
sudo python3 setup.py install
sudo python3 setup.py build
然后进入example文件夹,修改一个文件,我用的是all_params.py
system_address="udp://:14540"
改为
system_address="serial:///dev/ttyAMA0:921600"
运行
python3 all_params.py
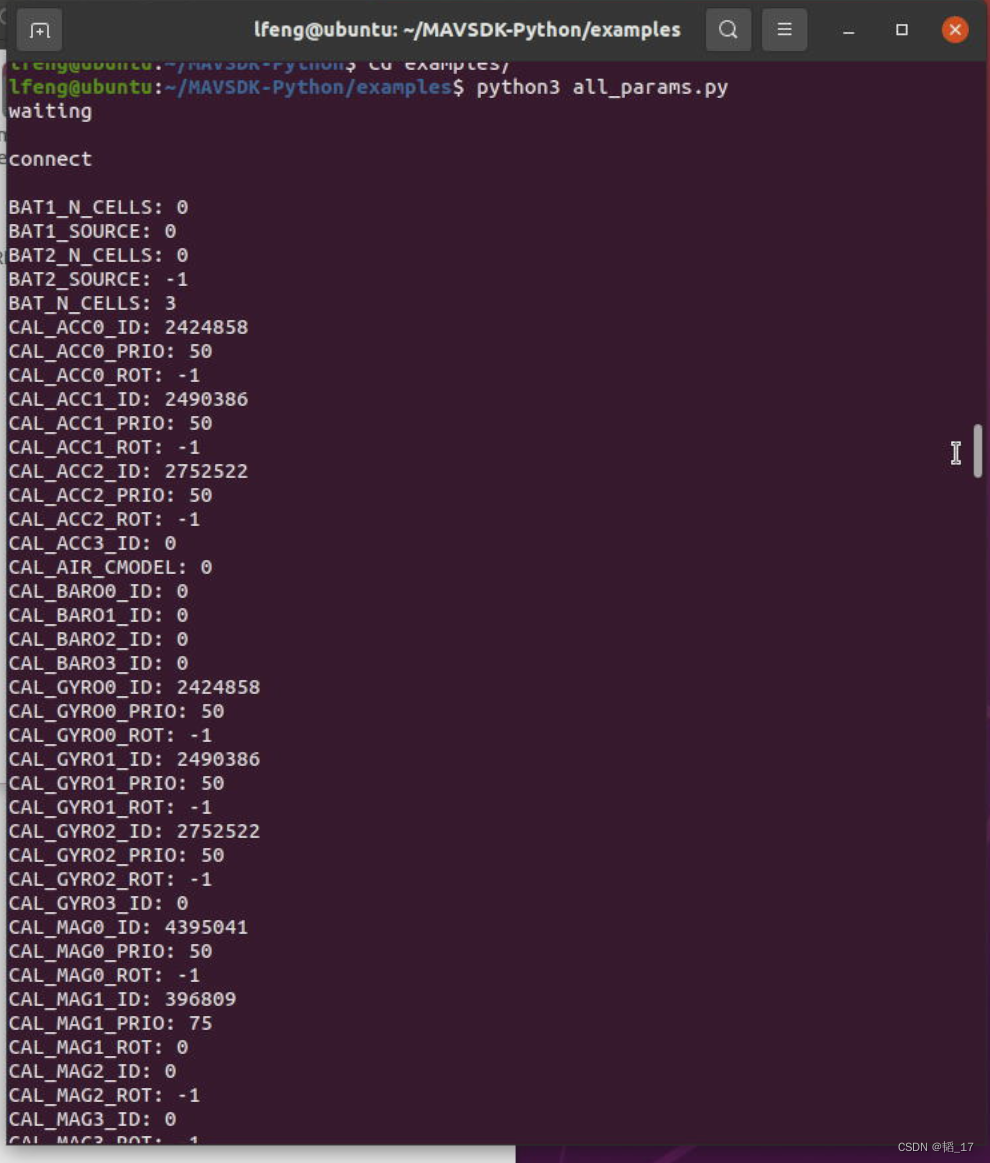
不知道为何我每次都得先install一下才可以
Internet设置
参考文档即可
最后
推荐一波obs studio配MS2130采集卡开发cm4,这个卡不到¥100就能1080p 60hz采集,良心的很
相关文章:
Pixhawk RPi CM4 Baseboard 树莓派CM4安装Ubuntu20.04 server 配置ros mavros mavsdk
文章目录硬件安装Ubuntu Server20.04下载rpiboot工具下载imager刷写系统配置USB配置WIFI开机安装桌面配置wifi配置串口安装ROS安装mavros安装MAVSDK-PythonInternet设置最后参考: https://docs.holybro.com/autopilot/pixhawk-baseboards/pixhawk-rpi-cm4-baseboard…...

后端开发过程中的安全问题
安全问题是木桶效应,整个系统的安全等级取决于安全性最薄弱的那个模块。在写业务代码的时候,要从我做起,建立最基本的安全意识,从源头杜绝低级安全问题。 1、数据源头的安全处理 对于 HTTP 请求,我们要在脑子里有一个…...

基于Hyperledger Fabric的学位学历认证管理系统
基于Hyperledger Fabric的学位学历认证管理系统 项目源码:https://github.com/Pistachiout/Academic-Degree-BlockChain 一、选题背景 学历造假、认证造假等是一个全球日益普遍的现象,不仅对社会产生了巨大的负面影响,同时也极大增加了企业…...

jq条件判断验证,正则表达式
// 判断是否包含为至少8位及以上字符,大小写字母及特殊字符 jQuery.validator.addMethod("isPwd", function (value, element) { var pwdRegex new RegExp((?.*[0-9])(?.*[A-Z])(?.*[a-z])(?.*[^a-zA-Z0-9]).{8,30}); return this.optional(elemen…...
23.3.9打卡 AtCoder Beginner Contest 259
A题 题解 对于x特判一下就好 代码 void solve() {ll x,d;cin>>n>>m>>x>>t>>d;if(n>m){nmin(n,x);if(n<m){cout<<t;return;}cout<<(m-n)*dt;}else{mmin(m,x);cout<<(m-n)*dt;}return; }B 三角函数全还给高中老师了 题…...

JS - this指向
一 this 指向有哪几种 详细可见:https://juejin.cn/post/6844903805587619854 (文章归类this指向为四大类) https://www.jianshu.com/p/66eb9b21105d this是什么?this 就是一个指针,指向调用函数的对象。 1.默认绑定…...

低代码有哪些典型应用场景?
低代码有哪些典型应用场景? 低代码是一种全新的应用开发方式,它通过可视化的拖拽式界面,将传统的繁琐代码编写转化为简单的拖拽操作,让非技术人员也能够快速地开发出应用程序。 随着数字化转型的不断加速,低代码平台…...

Substrate 基础教程(Tutorials) -- 监控节点指标
Substrate 公开有关网络操作的度量。例如,您可以收集有关您的节点连接了多少个对等节点、您的节点使用了多少内存以及正在生成的块数量的信息。为了捕获和可视化Substrate节点公开的度量,您可以配置和使用Prometheus和Grafana等工具。本教程演示如何使用…...

lua table 详解
文章目录1.table 声明与访问2. table 的两种遍历方式 pairs 和 ipairs2.1 pairs2.2 ipairs2.3 例3.迭代器实现 ipairs 效果4.获取 table 长度4.1 #table 获取长度4.2 自定义函数获取 table 长度注意事项1.table 声明与访问 -- 初始化表 tbl {} -- 不可以是 tbl nil-- 赋值 -…...

Element表单嵌套树形表格的校验问题
普通嵌套 表单和表格是项目中最常见的项目,有时候就会遇到表格嵌套表单的情况,比如 这种形式的其实挺好处理的,如下: <el-form:model"states"ref"tableFormRef"label-width"80px"label-posit…...
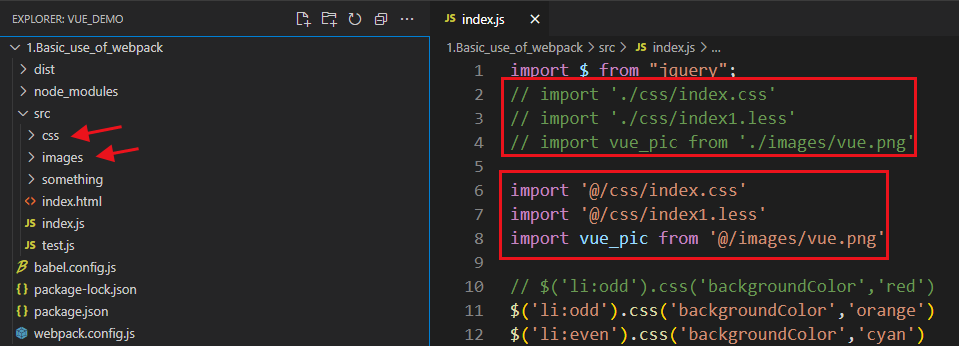
1.webpack的基本使用
webpack是做工程化用的,并且可以对代码进行压缩(搞成min.js那样),处理浏览器端JS兼容性,性能优化 vue-cli与webpack作用相同 目录 1 基本使用 1.1 引入场景 1.2 安装webpack 1.3 配置webpack 1.4 使用webpack 2 webpack.config.…...
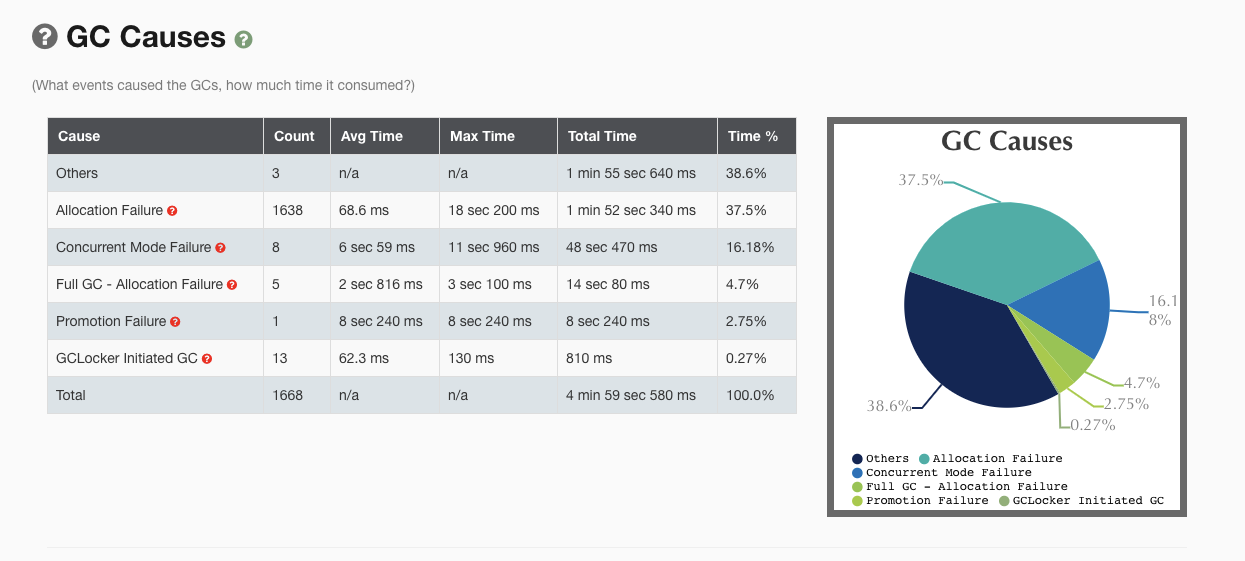
面试必看:谈谈你所了解的JVM调优,JVM性能调优总结
文章目录从面试角度来谈谈你了解的JVM调优GC调优的步骤1.确定目标:2.优化参数3.验收优化结果GC优化案例一、Major GC和Minor GC频繁优化Minor GC频繁问题:1.可以适当增大新生代的内存二、请求高峰期发生GC,导致服务可用性降低优化标记停顿时间…...

Pytorch优化器Optimizer
优化器Optimizer 什么是优化器 pytorch的优化器:管理并更新模型中可学习参数的值,使得模型输出更接近真实标签 导数:函数在指定坐标轴上的变化率 方向导数:指定方向上的变化率(二元及以上函数,偏导数&am…...
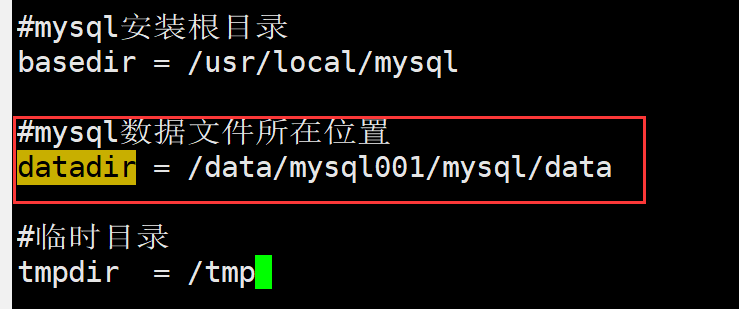
如何在MySQL 8中实现数据迁移?这里有一个简单易用的方案
文章目录前言一. 致敬IT领域的那些女性二. 进制方式安装MySQL2.1 下载软件包2.2 配置环境:2.2.1 配置yum环境2.2.2 配置安全前的系统环境2.3 开始安装2.4 初始化MySQL2.5 修改配置文件2.6 将MySQL设为服务并启动测试三. MySQL数据迁移总结前言 正好赶上IT女神节&am…...
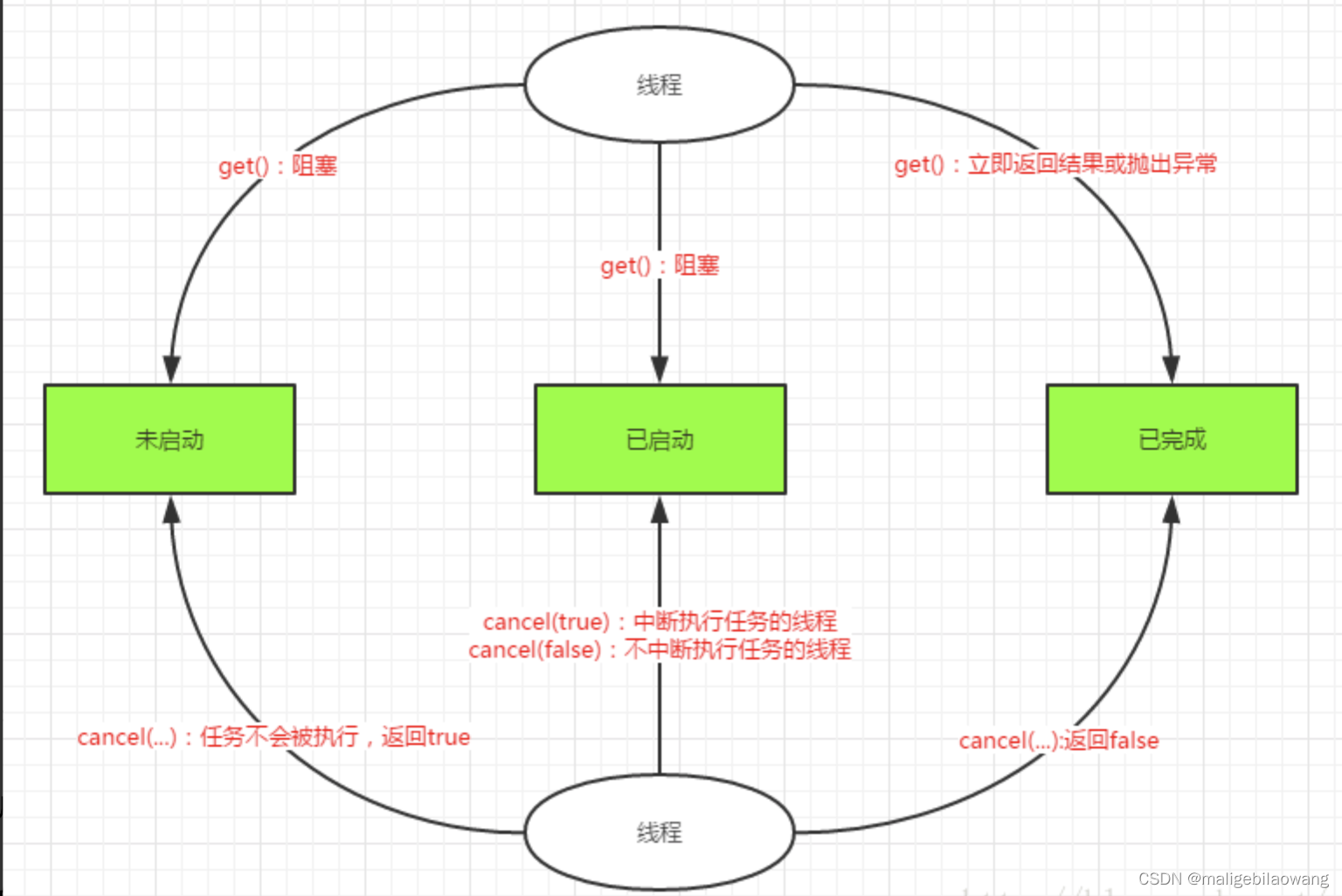
java多线程(二三)并发编程:Callable、Future和FutureTask
一、Callable 与 Runnable 先说一下java.lang.Runnable吧,它是一个接口,在它里面只声明了一个run()方法: public interface Runnable {public abstract void run(); }由于run()方法返回值为void类型,所以在执行完任务之后无法返…...

day4分支和循环作业
基础题 根据输入的成绩的范围打印及格 或者不及格。 score 58 if score > 90:print(及格) else:print(不及格)根据输入的年纪范围打印成年或者未成年,如果年龄不在正常范围内(0~150)打印这不是人!。 age 52 if 0 < age < 18:print(未成年) elif 18 &l…...

轮毂要怎么选?选大还是选小?
随着改装车的越来越火爆,汽车轮毂可选择的款式也越来越多,90%的人换轮毂,首先选的就是外观。大轮毂的款式多,外形大气好看,运动感十足, 那是不是选大轮毂就可以呢?不是的,汽车轮毂要…...

RabbitMq 使用说明
1. 声明交换机和队列,以及交换机和队列绑定 import lombok.extern.slf4j.Slf4j; import org.springframework.amqp.core.*; import org.springframework.beans.factory.annotation.Qualifier; import org.springframework.context.annotation.Bean; import org.spr…...
Vue(10-20)
1Vue赋值方式 Object.defineProperty <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta http-equiv"X-UA-Compatible" content"IEedge"><meta name"viewport" conten…...

C++-对四个智能指针:shared_ptr,unique_ptr,weak_ptr,auto_ptr的理解
回答如下: C的智能指针是一种特殊类型的“指针”,其主要目的是自动跟踪内存分配和释放,以避免程序中出现内存泄露或空悬指针等问题,主要采用的技术是:借助于类的生命周期,当超出了类的作用域时,…...

Cursor Pro破解工具完整指南:如何绕过限制实现永久免费使用
Cursor Pro破解工具完整指南:如何绕过限制实现永久免费使用 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached you…...

为初创团队搭建统一的大模型api网关以控制开发成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为初创团队搭建统一的大模型API网关以控制开发成本 对于初创技术团队而言,快速验证产品想法、迭代功能是生存的关键。在…...

晨芯阳HC9611高PSRR、防Inrush电流、低压差LDO转换器
HC9611系列是高PSRR,防Inrush电流,低噪声,低压差线性稳压器。HC9611系列稳压器内置固定电压基准,温度保护,限流电路以及快速响应电路,达到低功耗,低噪声,高纹波抑制,快速…...

开源短剧源码|短剧小程序源码短剧App源码双端适配,即开即用
在当下这个注意力稀缺的时代,短剧以其“爽点密集、节奏明快、情感代入强”的特点,迅速抢占了海量用户的碎片化时间。无论是国内的微信/抖音小程序生态,还是出海的短剧App市场,都呈现出爆发式的增长态势。然而,对于想要…...

5种智能匹配模式:Illustrator脚本replaceItems.jsx如何让设计元素替换效率提升20倍
5种智能匹配模式:Illustrator脚本replaceItems.jsx如何让设计元素替换效率提升20倍 【免费下载链接】illustrator-scripts Adobe Illustrator scripts 项目地址: https://gitcode.com/gh_mirrors/il/illustrator-scripts 在Adobe Illustrator设计工作中&…...

在Google Cloud上构建OpenAI兼容API网关:无缝对接Vertex AI模型
1. 项目概述:在Google Cloud上搭建你自己的OpenAI兼容API网关 如果你正在寻找一种方法,能够让你手头那些原本为OpenAI ChatGPT设计的应用,无缝对接上Google Cloud Vertex AI的强大模型,比如Gemini Pro、PaLM 2或者Codeyÿ…...
)
手把手教你给天邑TY1608机顶盒刷机(S905L3B芯片,支持RTL8822CS/MT7668无线模块)
天邑TY1608机顶盒刷机全攻略:从零开始玩转S905L3B芯片 第一次拿到天邑TY1608机顶盒时,你可能被它原厂系统的各种限制所困扰——预装软件无法卸载、广告弹窗频繁出现、存储空间严重不足。这款搭载Amlogic S905L3B芯片的设备,配合RTL8822CS或MT…...

基于Tauri与Rust构建跨平台Claude桌面客户端:架构设计与工程实践
1. 项目概述:一个为Claude设计的“圣杯”级桌面应用 如果你和我一样,在日常开发、写作或信息处理中重度依赖Anthropic的Claude模型,那么你肯定也经历过在浏览器标签页间反复横跳、复制粘贴、以及管理冗长对话历史的烦恼。 CoderLuii/HolyCla…...

终极指南:使用dmg2img免费快速转换苹果DMG镜像文件
终极指南:使用dmg2img免费快速转换苹果DMG镜像文件 【免费下载链接】dmg2img DMG2IMG allows you to convert a (compressed) Apple Disk Images (imported from http://vu1tur.eu.org/dmg2img). Note: the master branch contains imported code, but lacks bugfix…...

Taotoken模型广场在项目技术选型阶段提供的便利性体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken模型广场在项目技术选型阶段提供的便利性体验 启动一个新的AI项目时,技术决策者面临的首要挑战往往是模型选型…...