STM32Cube STM32MP157 M4端CAN通讯实战
1、环境
开发系列:STM32MP157
开发软件:STM32CubeIDE 1.4.0
例程目的:在M4端实现CAN通讯
2、目的
近日,有客户需要在STM32MP157中的M4端实现CAN通讯,我也是初次在M4端编写CAN通讯代码,上网研究了其他人写的STM32系列单片机案例才把这个例程Demo写好。
3、程序配置
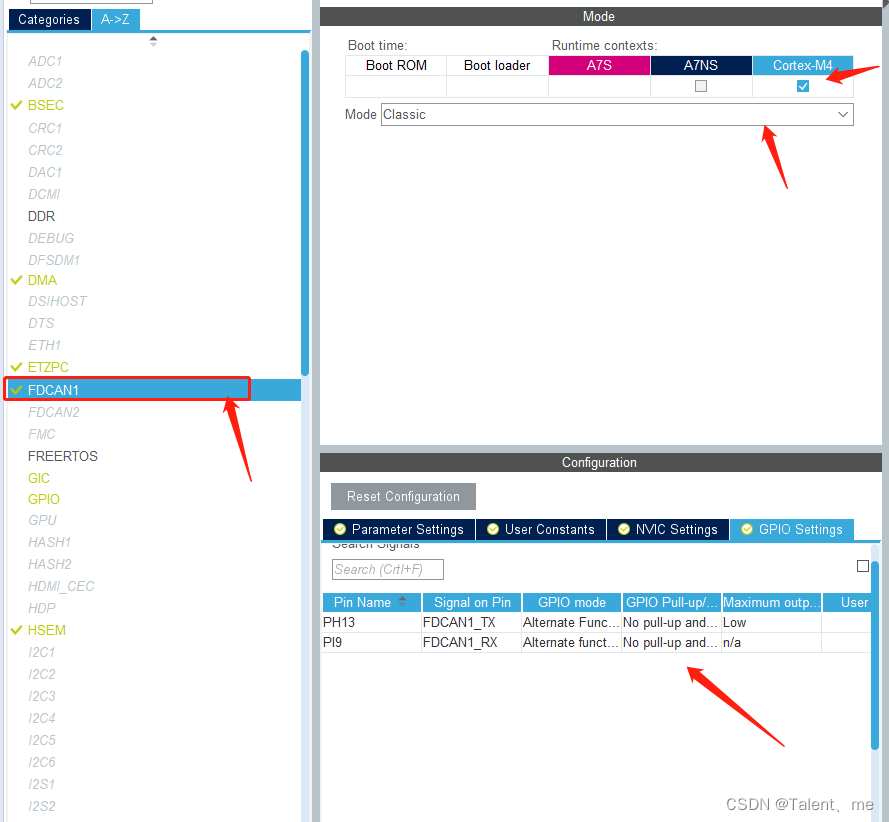
1、CAN引脚选用:
FDCAN1_RX ---->PI9
FDCAN1_TX ----->PH13

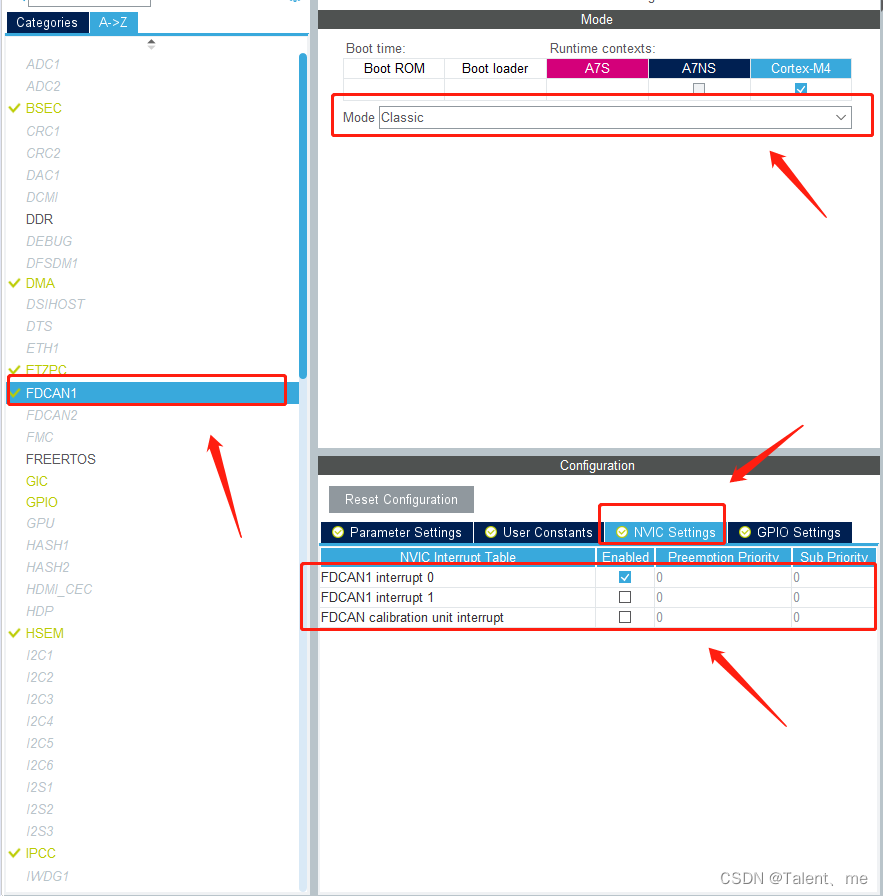
2、配置FDCAN1的相关参数
Mode模式选择Classic
如果刚刚第一步配置好的话,GPIO Setting上会出现两个引脚列表。
如果需要配置CAN中断接收的话把这个钩上√
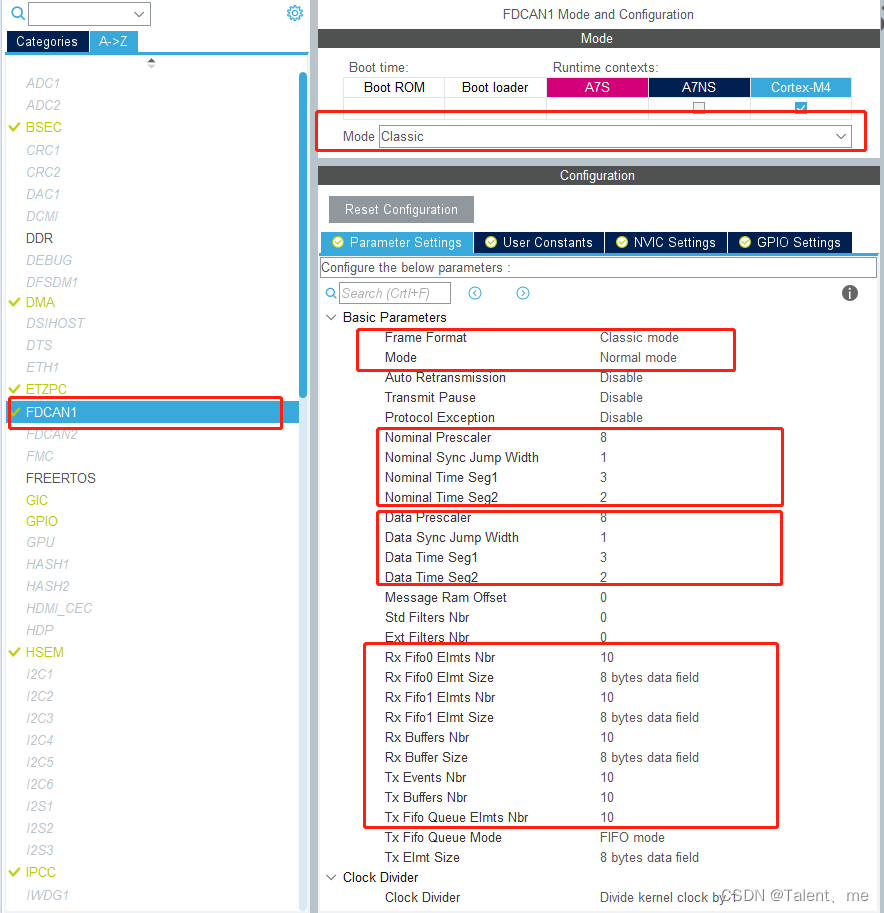
这里非常关键一步就是Parameter Setting
重点!!!!!!!:Norminal xxxx这四个参数的设置直接决定了CAN波特率是多少!!!
CAN波特率的计算方式 :CAN波特率 = 系统时钟/Norminal prescaler/ (Nominal Sync Jump Width+Nominal Time Seg1+Nominal Time Seg1)
数据段也跟仲裁段一样的配置就好了。
Tx Fifo Queue Elmts Nbr为10,该参数设置用于Tx FIFO/Queue的Tx Buffers个数。范围0-32
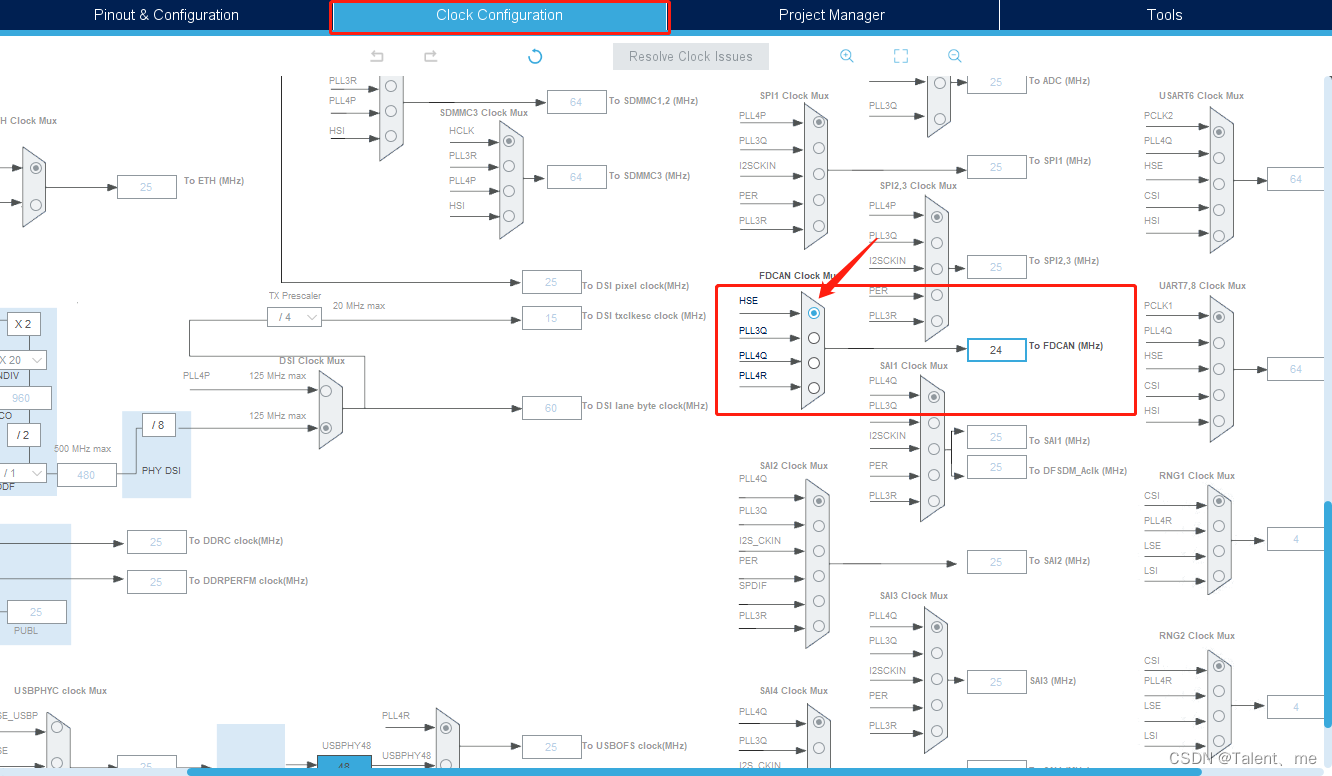
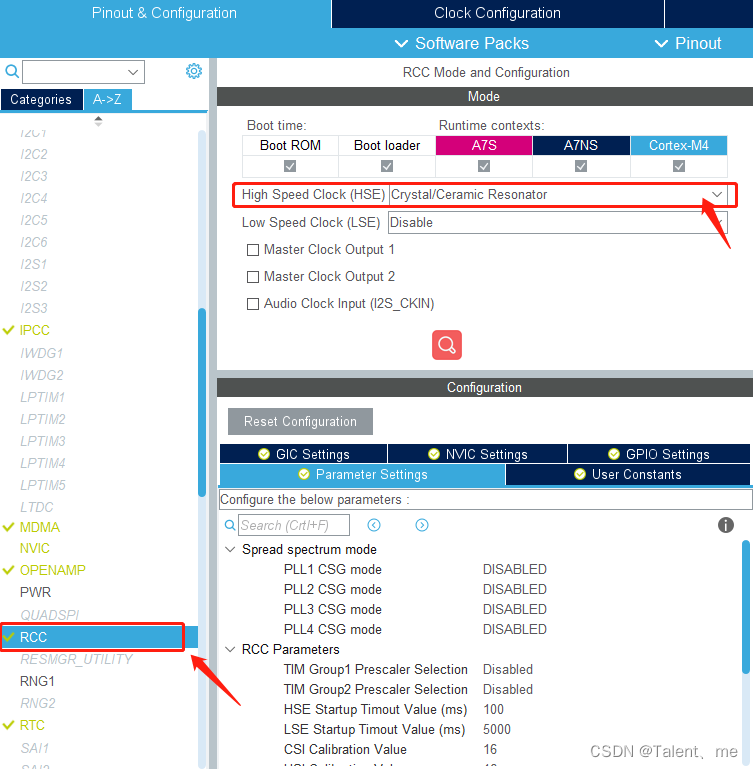
上一步说到波特率的计算,其中系统时钟是在clock configuration配置,这里值得注意的是我使用的是HSE(外部高速时钟)为24MHZ。
所以波特率为24MHZ/8/(1+3+2) = 500KHZ
我这配置FDCAN模块的时候遇到了HSE被disable了,也就是说无法使用,这样我们需要使用一下设置,如下图,把disable改成Crustal/Ceramic Resonator
完成以上步骤后,可以保存一下.ioc文件,会自动生成初始化代码
4、代码编写
fdcan初始化代码,这些都不需要我们自行编写,只需在ioc文件上选择上保存即可。
fdcan.c
/* FDCAN1 init function */
void MX_FDCAN1_Init(void)
{hfdcan1.Instance = FDCAN1;hfdcan1.Init.FrameFormat = FDCAN_FRAME_CLASSIC;hfdcan1.Init.Mode = FDCAN_MODE_NORMAL;hfdcan1.Init.AutoRetransmission = DISABLE;hfdcan1.Init.TransmitPause = DISABLE;hfdcan1.Init.ProtocolException = DISABLE;hfdcan1.Init.NominalPrescaler = 8;hfdcan1.Init.NominalSyncJumpWidth = 1;hfdcan1.Init.NominalTimeSeg1 = 3;hfdcan1.Init.NominalTimeSeg2 = 2;hfdcan1.Init.DataPrescaler = 8;hfdcan1.Init.DataSyncJumpWidth = 1;hfdcan1.Init.DataTimeSeg1 = 3;hfdcan1.Init.DataTimeSeg2 = 2;hfdcan1.Init.MessageRAMOffset = 0;hfdcan1.Init.StdFiltersNbr = 0;hfdcan1.Init.ExtFiltersNbr = 0;hfdcan1.Init.RxFifo0ElmtsNbr = 10;hfdcan1.Init.RxFifo0ElmtSize = FDCAN_DATA_BYTES_8;hfdcan1.Init.RxFifo1ElmtsNbr = 10;hfdcan1.Init.RxFifo1ElmtSize = FDCAN_DATA_BYTES_8;hfdcan1.Init.RxBuffersNbr = 10;hfdcan1.Init.RxBufferSize = FDCAN_DATA_BYTES_8;hfdcan1.Init.TxEventsNbr = 10;hfdcan1.Init.TxBuffersNbr = 10;hfdcan1.Init.TxFifoQueueElmtsNbr = 10;hfdcan1.Init.TxFifoQueueMode = FDCAN_TX_FIFO_OPERATION;hfdcan1.Init.TxElmtSize = FDCAN_DATA_BYTES_8;if (HAL_FDCAN_Init(&hfdcan1) != HAL_OK){Error_Handler();}}void HAL_FDCAN_MspInit(FDCAN_HandleTypeDef* fdcanHandle)
{GPIO_InitTypeDef GPIO_InitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};if(fdcanHandle->Instance==FDCAN1){/* USER CODE BEGIN FDCAN1_MspInit 0 *//* USER CODE END FDCAN1_MspInit 0 */if(IS_ENGINEERING_BOOT_MODE()){/** Initializes the peripherals clock*/PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_FDCAN;PeriphClkInit.FdcanClockSelection = RCC_FDCANCLKSOURCE_HSE;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}}/* FDCAN1 clock enable */__HAL_RCC_FDCAN_CLK_ENABLE();__HAL_RCC_GPIOH_CLK_ENABLE();__HAL_RCC_GPIOI_CLK_ENABLE();/**FDCAN1 GPIO ConfigurationPH13 ------> FDCAN1_TXPI9 ------> FDCAN1_RX*/GPIO_InitStruct.Pin = GPIO_PIN_13;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.Alternate = GPIO_AF9_FDCAN1;HAL_GPIO_Init(GPIOH, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_9;GPIO_InitStruct.Mode = GPIO_MODE_AF;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Alternate = GPIO_AF9_FDCAN1;HAL_GPIO_Init(GPIOI, &GPIO_InitStruct);/* FDCAN1 interrupt Init */HAL_NVIC_SetPriority(FDCAN1_IT0_IRQn, 0, 0);HAL_NVIC_EnableIRQ(FDCAN1_IT0_IRQn);/* USER CODE BEGIN FDCAN1_MspInit 1 *//* USER CODE END FDCAN1_MspInit 1 */}
}
接下来就是要我们手动编写的函数接口
can接受过滤器配置
更多的配置可以查看一下该stm32mp1xx_hal_fdcan.h文件
void CANconfigure()
{FDCAN_FilterTypeDef sFilterConfig;sFilterConfig.IdType = FDCAN_STANDARD_ID;//标准帧 FDCAN_EXTENDED_IDsFilterConfig.FilterIndex = 0;sFilterConfig.FilterType = FDCAN_FILTER_DUAL;//双过滤。FDCAN_FILTER_RANGEsFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO0;//过滤存储在rx fifo0sFilterConfig.FilterID1 = 0;//范围idsFilterConfig.FilterID2 = 0;//范围id//表示只能接收FilterID1 << id << FilterID2 //如果设置为0的话,表示不做任何的过滤if (HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig) != HAL_OK)//滤波器初始化{Error_Handler();}sFilterConfig.IdType = FDCAN_STANDARD_ID;sFilterConfig.FilterIndex = 0;sFilterConfig.FilterType = FDCAN_FILTER_DUAL;sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO1;sFilterConfig.FilterID1 = 0;sFilterConfig.FilterID2 = 0;if (HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig) != HAL_OK)//滤波器初始化{Error_Handler(); }if (HAL_FDCAN_Start(&hfdcan1) != HAL_OK)//开启FDCAN {Error_Handler();}if(HAL_FDCAN_ActivateNotification(&hfdcan1, FDCAN_IT_RX_FIFO0_NEW_MESSAGE, FDCAN_IT_TX_COMPLETE) != HAL_OK){Error_Handler();}
}
can发送函数:
FDCAN_HandleTypeDef hfdcan1;//全局变量
FDCAN_TxHeaderTypeDef TxHeader;//全局变量CAN_Transmit(uint16_t ID, uint8_t *pdata, uint8_t length)
{TxHeader.Identifier = ID;//帧IDTxHeader.IdType = FDCAN_STANDARD_ID;//标准IDTxHeader.TxFrameType = FDCAN_DATA_FRAME;//数据帧TxHeader.DataLength = FDCAN_DLC_BYTES_8;//数据长度TxHeader.ErrorStateIndicator = FDCAN_ESI_PASSIVE;//错误指示TxHeader.BitRateSwitch = FDCAN_BRS_OFF;//关闭可变波特率TxHeader.FDFormat = FDCAN_CLASSIC_CAN;//传统classsic canTxHeader.TxEventFifoControl = FDCAN_NO_TX_EVENTS;//发送时间FIFO控制,不存储TxHeader.MessageMarker = 0; //识别消息状态,范围0到0xFFif (HAL_FDCAN_AddMessageToTxFifoQ(&hfdcan1, &TxHeader, pdata) != HAL_OK){Error_Handler();}
}
接收中断回调函数
void HAL_FDCAN_RxFifo0Callback(FDCAN_HandleTypeDef *hfdcan, uint32_t RxFifo0ITs)
{printf("fdcan recvice.....\r\n");/* Get RX message */if (HAL_FDCAN_GetRxMessage(hfdcan, FDCAN_RX_FIFO0, &RxHeader, (uint8_t*)&can_rx_data.RX_Data[0]) != HAL_OK){Error_Handler();}can_rx_data.ID = RxHeader.Identifier;can_rx_data.length = RxHeader.DataLength>>16;for (int i=0;i<can_rx_data.length;i++){printf("fdcan recvice%d:%d.....\r\n",i,can_rx_data.RX_Data[i]);}
}
编写好这几个函数接口之后,编译看是否有错误再稍微作修改。
5、问题及方法
1、判断你的函数接口和配置是否正确,我发现可以是用外部回环模式进行测试,这样可以摆脱外部因素导致了通讯失败。
将FDCAN_FRAME_CLASSIC改成FDCAN_MODE_EXTERNAL_LOOPBACK
void MX_FDCAN1_Init(void)
{hfdcan1.Instance = FDCAN1;hfdcan1.Init.FrameFormat = FDCAN_MODE_EXTERNAL_LOOPBACK;hfdcan1.Init.Mode = FDCAN_MODE_NORMAL;//省略部分代码}
2、这个是最最最最奇葩的,搞了我几天时间,就是如果在M4上使用CAN接口有可能需要修改tf-a文件和dtb设备树。
从源码上找到属于自己板子的fdts/stm32mp157xxxx.dtsi文件,修改如下:
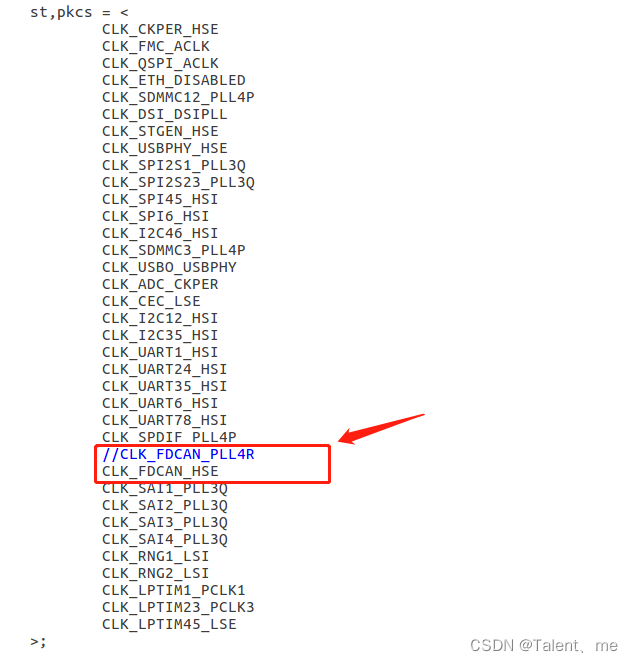
因为我使用的是HSE时钟,而原来的是PLL4R时钟,导致时钟不工作,CAN功能异常。
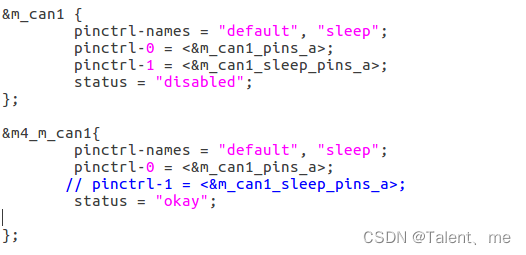
内核设备树DTB修改:
把m_can1屏蔽disabled,分配给m4_m_can1
总结
希望大家遇到像我这类似的问题,能少走点弯路。好好总结。
相关文章:
STM32Cube STM32MP157 M4端CAN通讯实战
1、环境 开发系列:STM32MP157 开发软件:STM32CubeIDE 1.4.0 例程目的:在M4端实现CAN通讯 2、目的 近日,有客户需要在STM32MP157中的M4端实现CAN通讯,我也是初次在M4端编写CAN通讯代码,上网研究了其他人写…...

npm install报错unable to resolve dependency tree
一、问题背景npm install安装项目依赖时报错PS D:\test> npm install npm ERR! code ERESOLVE npm ERR! ERESOLVE unable to resolve dependency tree npm ERR! npm ERR! While resolving: vue-admin-template4.2.1 npm ERR! Found: webpack5.74.0 npm ERR! node_modules/we…...

力扣sql简单篇练习(二十六)
力扣sql简单篇练习(二十六) 1 每家商店的产品价格 1.1 题目内容 1.1.1 基本题目信息 1.1.2 示例输入输出 1.2 示例sql语句 # 多行变成多列,考虑用sum if分组 SELECT product_id,sum(IF(storestore1,price,null)) store1,sum(IF(storestore2,price,null)) store2, sum(IF(st…...
网络安全竞赛试题A模块第九套解析(详细))
2022年全国职业院校技能大赛(中职组)网络安全竞赛试题A模块第九套解析(详细)
2022年全国职业院校技能大赛(中职组) 网络安全竞赛试题 (9) (总分100分) 赛题说明 一、竞赛项目简介 “网络安全”竞赛共分A.基础设施设置与安全加固;B.网络安全事件响应、数字取证调查和应用安全;C.CTF夺旗-攻击;D.CTF夺旗-防御等四个模块。根据比赛实际情况,竞…...

C++回顾(十六)—— 异常处理机制
16.1 异常的基本语法 1) 若有异常则通过throw操作创建一个异常对象并抛掷。2) 将可能抛出异常的程序段嵌在try块之中。控制通过正常的顺序执行到达try语句,然后执行try块内的保护段。3) 如果在保护段执行期间没有引起异常…...

【100个 Unity实用技能】 | Unity 在代码中 动态改变RectTransform位置及宽高 的方法整理
Unity 小科普 老规矩,先介绍一下 Unity 的科普小知识: Unity是 实时3D互动内容创作和运营平台 。包括游戏开发、美术、建筑、汽车设计、影视在内的所有创作者,借助 Unity 将创意变成现实。Unity 平台提供一整套完善的软件解决方案ÿ…...
哈希表的实现
哈希表概念 二叉搜索树具有对数时间的表现,但这样的表现建立在一个假设上:输入的数据有足够的随机性。哈希表又名散列表,在插入、删除、搜索等操作上具有「常数平均时间」的表现,而且这种表现是以统计为基础,不需依赖…...

搞懂海明码
海明码搞懂之前先了解奇偶校验。例如:1111 对其进行奇偶校验。 奇检验:11111 奇校验使1的个数保持在奇数 偶校验:01111 偶校验使1的个数保持在偶数 海明码可以拆分为三步: 一、确定校验的位数 公式:2^k > k n …...
数据库:Mysql数据库安装及使用
目录 一、数据库介绍 1、基本概念 2、数据库类型 3、版本演变 二、Mysql安装 1、官网下载yum安装 2、手动配置yum安装 三、Mysql基本操作 1、登录与改密 2、检测数据库健康 3、 库的创建与使用 4、数据类型 5、修饰符 6、表的创建与使用 7、分组查询 8、查询排…...

【冲刺蓝桥杯的最后30天】day7
大家好😃,我是想要慢慢变得优秀的向阳🌞同学👨💻,断更了整整一年,又开始恢复CSDN更新,从今天开始更新备战蓝桥30天系列,一共30天,如果对你有帮助或者正在备…...

REG.EXE修改注册表-解决win10微软输入法默认中文,将其全局修改为英文
REG.EXE修改注册表-解决win10微软输入法默认中文,将其全局修改为英文 使用REG.EXE 可以直接强制修改注册表字段 修改注册表: REG.EXE ADD 注册表路径 /v 注册表项字段 /t 注册表字段类型 /d 注册表值 /f 例如: REG. EX ADD HKLM\System\C…...
hive之正则函数研究学习regex/regex_replace/regex_extract
首先学习这个之前要先知道一些正则的基本知识。 随便百度一下正则表达式 – 元字符 | 菜鸟教程 字符描述\ 将下一个字符标记为一个特殊字符、或一个原义字符、或一个 向后引用、或一个八进制转义符。例如,n 匹配字符 "n"。\n 匹配一个换行符。序列 \\ 匹…...
 C、D1)
Codeforces Round 854 by cybercats (Div. 1 + Div. 2) C、D1
C. Double Lexicographically Minimum 题意 字符串sss,你可以把它按任意顺序组合,保留的是你组合的字符串和它的倒序之间大的那一个,问你在满足上面条件的前提下字典序最小的字符串。 思路 分析不难发现在没达到一个关键的点的时候肯定是…...

API 网关日志的价值,你了解多少?
本文介绍了 API 网关日志的价值,并以知名网关 Apache APISIX 为例,展示如何集成 API 网关日志。 作者钱勇,API7.ai 技术工程师,Apache APISIX Committer。 原文链接 网关日志的价值 在数字化时代,软件架构随着业务成…...
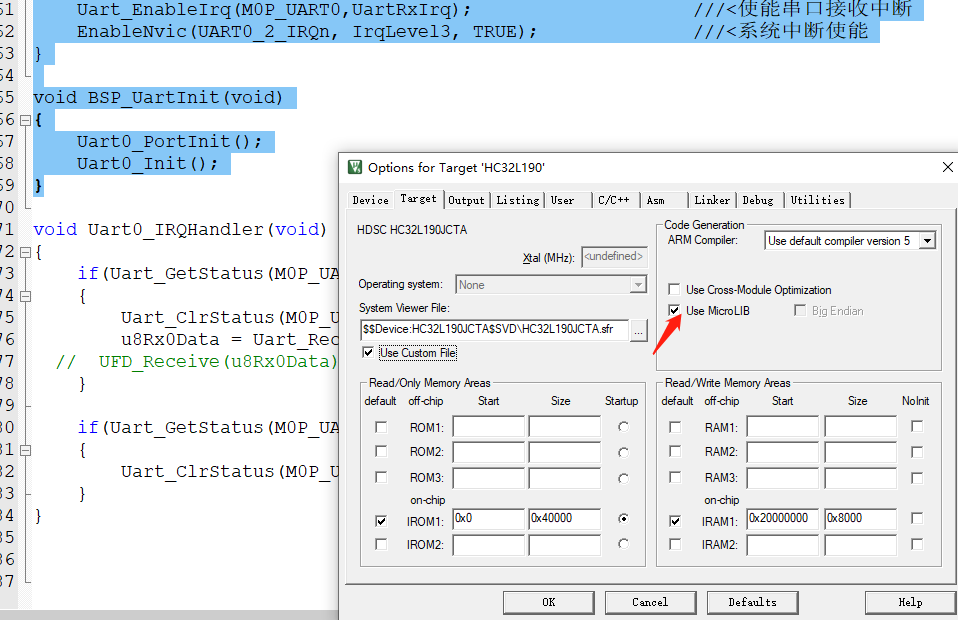
华大单片机、STM32单片机如何做printf串口打印格式化输出
第一种方法:使用标准C库,但使用标准C库你必须关闭半主机模式(1)添加下面代码就是关闭半主机模式/* 告知连接器不从C库链接使用半主机的函数 */ #pragma import(__use_no_semihosting)/* 定义 _sys_exit() 以避免使用半主机模式 */…...

unity 面试汇总
1、什么是协同程序?答:在主线程运行时同时开启另一段逻辑处理,来协助当前程序的执行。换句话说,开启协程就是开启一个可以与程序并行的逻辑。可以用来控制运动、序列以及对象的行为。2、Unity3D中的碰撞器和触发器的区别ÿ…...
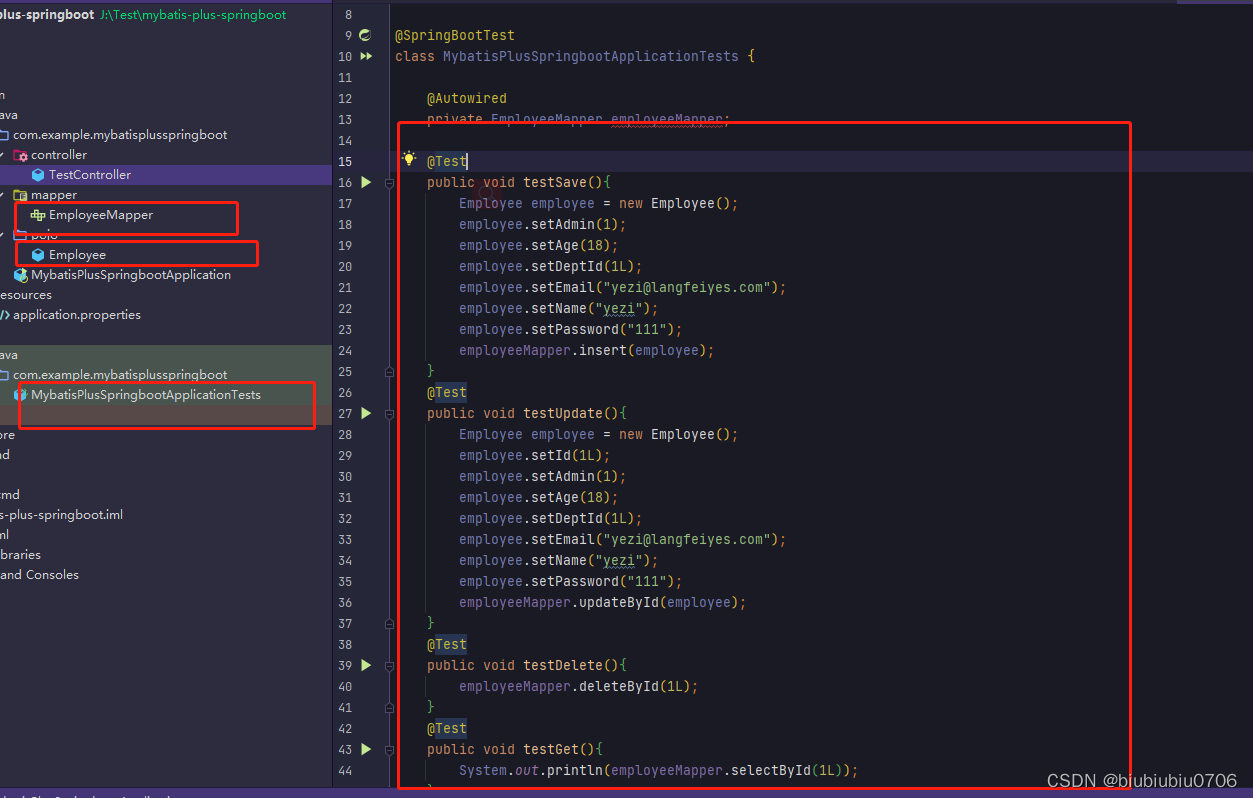
Spring SpringBoot中使用Mybatis-plusDemo1
官网:https://baomidou.com GitHub:GitHub - baomidou/mybatis-plus: An powerful enhanced toolkit of MyBatis for simplify development Gitee:mybatis-plus: mybatis 增强工具包,简化 CRUD 操作。 文档 http://baomidou.com低代码组件库 http://aizuda.com My…...

【18.04Ubuntu中解决无法识别显示屏】
【18.04Ubuntu中解决无法识别外接显示屏】1. 问题来源2. 检查Ubuntu是否识别出外接显示器3. 解决没有识别出外接显示器问题4. 显示器扩展屏幕设置1. 问题来源 实验室的一个dell显示器,通过HDMI连接电脑后,在Windows上连接上就直接可以使用了。由于我电脑…...
Python 协程详解,都在这里了
什么是协程 协程(co-routine,又称微线程、纤程) 是一种多方协同的工作方式。 协程不是进程或线程, 其执行过程类似于 Python 函数调用, Python 的 asyncio 模块实现的异步IO编程框架中, 协程是对使用 asy…...

百家号如何写文章赚钱,百家号写文章真的赚钱?
随着互联网的快速发展,越来越多的人开始关注到写文章赚钱这个领域。而在众多写作平台中,头条号无疑是最受欢迎的一个。那么,百家号写文章赚钱是真的吗?如何写文章赚钱呢?下面我们就来一一解答。 首先,百家号…...

3步打造你的专属游戏串流服务器:Sunshine终极指南
3步打造你的专属游戏串流服务器:Sunshine终极指南 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 还在为无法在客厅大电视上玩PC游戏而烦恼吗?想在平板上继…...

Hummingbot自动化交易框架:从原理到实战的量化交易指南
1. 项目概述:一个为专业交易者打造的自动化交易框架如果你在加密货币交易领域摸爬滚打过一段时间,一定会对“手动盯盘”的疲惫和“情绪化操作”的代价深有体会。市场24/7运转,机会转瞬即逝,而人的精力终究有限。这正是我最初接触并…...

AnyFlip下载器:3分钟将在线翻页电子书变为永久PDF收藏
AnyFlip下载器:3分钟将在线翻页电子书变为永久PDF收藏 【免费下载链接】anyflip-downloader Download anyflip books as PDF 项目地址: https://gitcode.com/gh_mirrors/an/anyflip-downloader 你是否曾在AnyFlip网站上发现一本精彩的电子书,想要…...

FanControl深度解析:完全掌控Windows风扇转速的专业级工具
FanControl深度解析:完全掌控Windows风扇转速的专业级工具 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trendin…...

Android MediaProjection实战:从权限适配到异常处理,构建Android Q+的稳定截屏录屏功能
1. 理解MediaProjection的核心机制 在Android Q及以上版本中,MediaProjection API是系统级截屏和录屏功能的唯一官方入口。与早期版本直接调用adb screencap或反射获取Surface不同,这套机制通过用户显式授权的方式实现隐私保护。我曾在多个项目中遇到过因…...

RAG 系统优化全流程:从数据入库到召回排序
RAG(Retrieval-Augmented Generation)系统的检索质量直接决定生成内容的上限。本文从工程落地角度,系统梳理 RAG 检索链路的三个核心阶段——入库、查询与召回。针对每个阶段的关键技术(语义分割、问答模拟、查询改写、语义校验、混合检索、语义重排)给出定义、问题背景、…...

增量式编码器驱动开发实战:从原理到FPGA高速计数
1. 增量式编码器核心原理剖析 第一次接触增量式编码器时,我完全被它精妙的设计震撼到了。这种看似简单的装置,竟然能同时测量转速、转向和位置信息。拆开我们实验室的欧姆龙E6B2编码器,你会发现它的核心就是三个部分:发光二极管、…...

VMware macOS虚拟机深度解锁指南:Unlocker 3.0架构剖析与实战应用
VMware macOS虚拟机深度解锁指南:Unlocker 3.0架构剖析与实战应用 【免费下载链接】unlocker VMware Workstation macOS 项目地址: https://gitcode.com/gh_mirrors/unloc/unlocker 在虚拟化技术领域,VMware Workstation和Player用户长期面临一个…...

死锁四大必要条件解析
好的,针对“死锁考点与高频面试题”,我将直接进行核心内容解构与推演,并生成符合规范的答案。死锁是多线程并发编程中的核心难点与高频考点,其核心围绕定义、条件、场景、检测、预防与避免展开。一、 死锁核心定义与必要条件死锁是…...

如何在Dev-C++中选择TDM-GCC编译器
在Dev-C中选择TDM-GCC编译器的步骤如下:打开编译器设置启动Dev-C,点击顶部菜单栏的 "工具" → "编译器选项"选择编译器在打开的窗口中:切换到 "编译器" 选项卡勾选 "在连接器命令行加入以下命令"在下…...