9.1.1 简述目标检测领域中的单阶段模型和两阶段模型的性能差异及其原因
9.1目标检测
场景描述
-
目标检测(Object Detection)任务是计算机视觉中极为重要的基础问题,也是解决实例分割(Instance Segmentation)、场景理解(Scene Understanding)、目标跟踪(ObjectTracking)、图像标注(Image Captioning)等问题的基础。
-
目标检测,顾名思义,就是检测输入图像中是否存在给定类别的物体,如果存在,则输出物体在图像中的位置信息。这里的位置信息通常用矩形边界框(bounding box)的坐标值来表示。
-
物体检测模型大致可以分为单阶段(one-stage)模型和两阶段(two-stage)模型两大类。
-
本节分析和对比了这两类模型在架构、性能和效率上的差异,给出了原理解释,并介绍了其各自的典型模型和发展前沿,以帮助读者对物体检测领域建立一个较为全面的认识。
知识点
物体检测、单步模型、两步模型、R-CNN系列模型、YOLO系列模型
9.1.1 简述目标检测领域中的单阶段模型和两阶段模型的性能差异及其原因
单阶段模型:
-
单阶段模型是指没有独立地、显式地提取候选区域(region proposal),直接由输入图像得到其中存在的物体的类别和位置信息的模型。
-
典型的单阶段模型有
- OverFeat[1]、
- SSD(Single Shotmultibox-Detector)[2]、
- YOLO(You Only Look Once)[3-5]系列模型等。
两阶段模型:
-
两阶段模型有独立的、显式的候选区域提取过程,即先在输入图像上筛选出一些可能存在物体的候选区域,然后针对每个候选区域,判断其是否存在物体,如果存在,就给出物体的类别和位置修正信息。
-
典型的两阶段模型有
- R-CNN [6]
- SPPNet [7]
- Fast R-CNN[8]
- Faster R-CNN[9]
- R-FCN[10]
- Mask R-CNN[11]等
性能差异
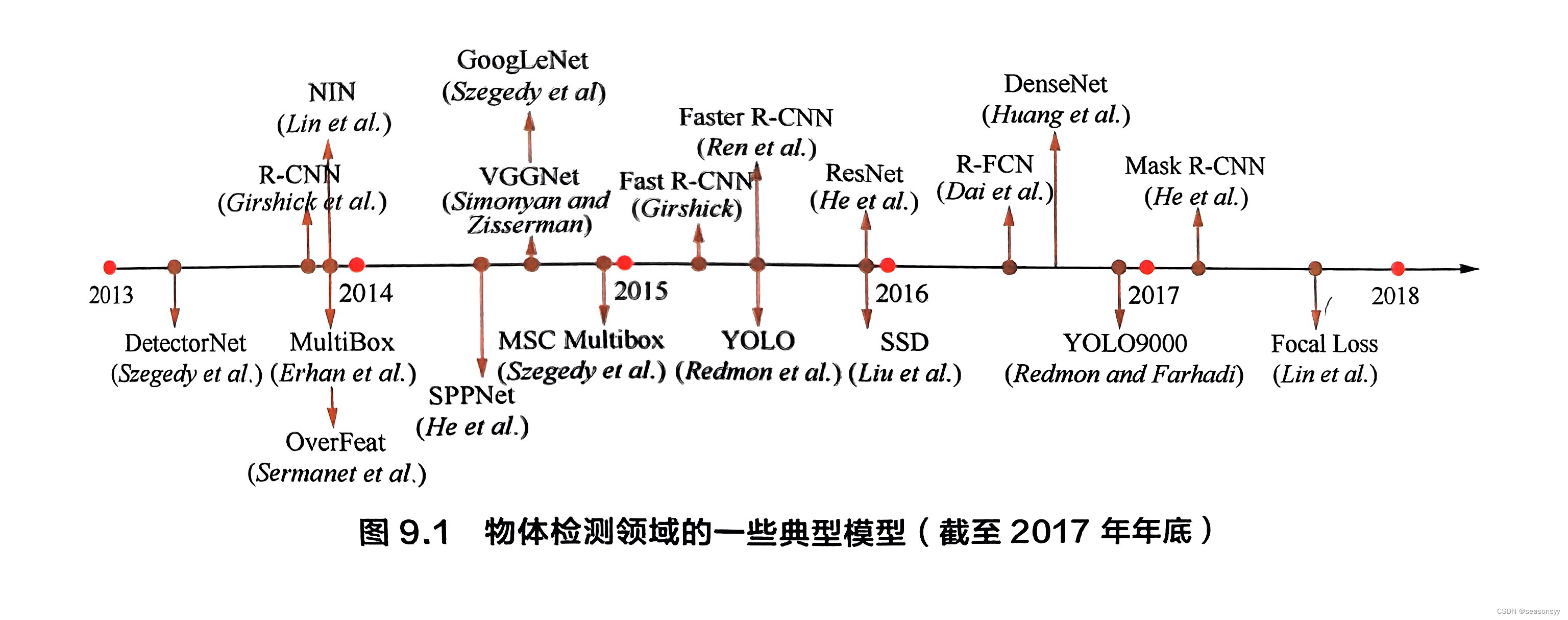
图9.1总结了目标检测领域重一些典型模型(包括单阶段和两阶段)的发展历程(截止2017年年底)[12]。
一般来说,单阶段模型在计算效率上有优势,两阶段模型在检测精度上有优势。
参考文献[13]对比了Faster R-CNN和SSD等模型在速度和精度上的差异,如图9.2所示。
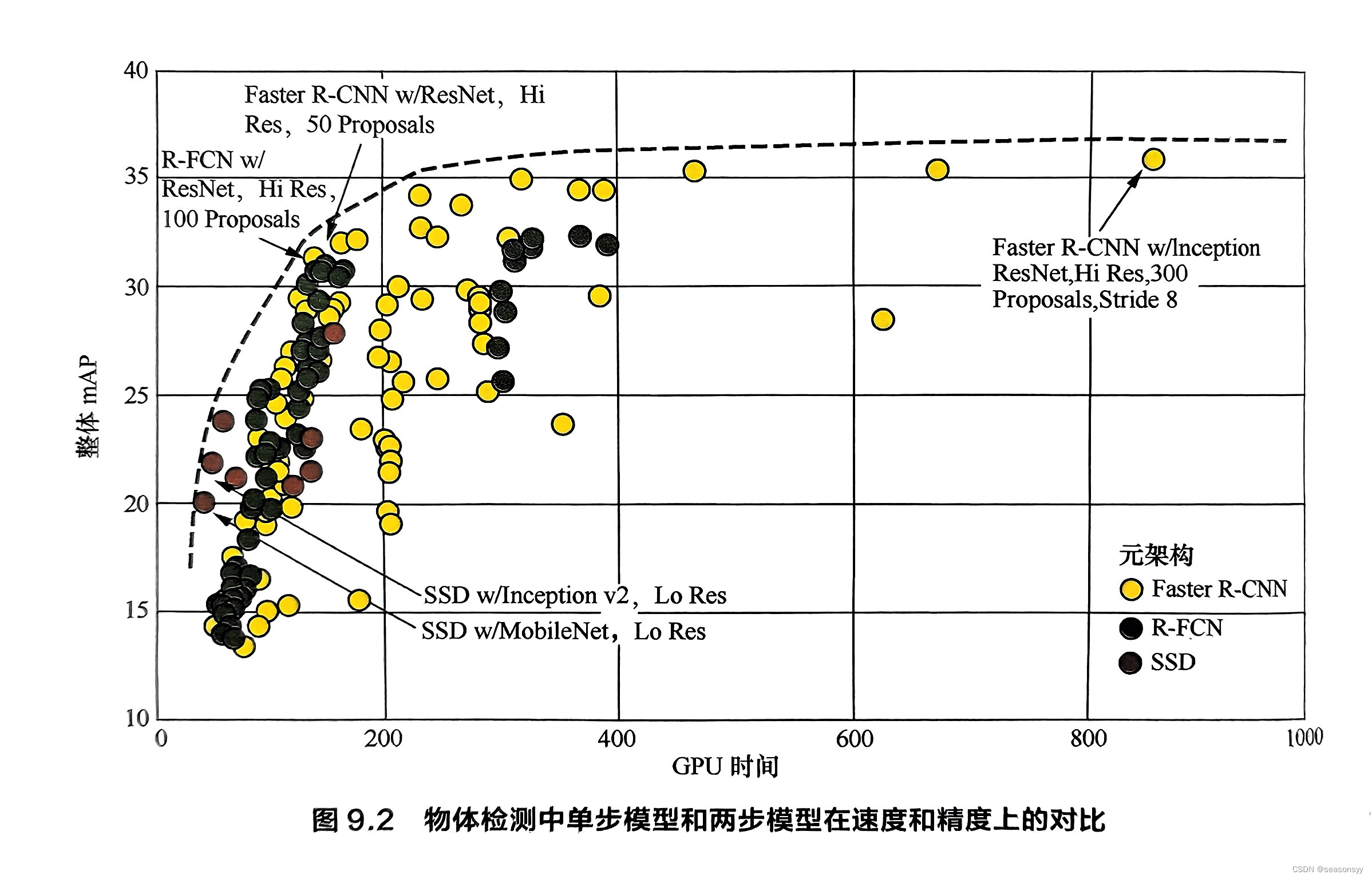
注:图9.2中,SSD的颜色是棕色圆圈。R-FCN是深绿色圆圈。
可以看到:
当检测时间较短时,单阶段模型SSD能取得更高的精度;
而随着检测时间的增加,两阶段模型Faster R-CNN则在精度上取得优势。
在速度和精度上的差异原因
对于单阶段模型与两阶段模型在速度和精度上的差异,学术界一般认为有如下原因。
-
摘要:两阶段模型有独立候选框提取步骤,所以到第二步分类和修正候选框的时候,正负样本比例平衡。
单阶段模型负样本比例较大。
-
单阶段模型:大多数单阶段模型是利用**预设的锚框(Anchor Box)**来捕捉可能存在于图像中各个位置的物体。
因此,单阶段模型会对数量庞大的锚框进行是否含有物体及物体所属类别的密集分类。
由于一幅图像中实际含有的物体数目远小于锚框的数目,因而在训练这个分类器时正负样本数目是极不均衡的,这会导致分类器训练效果不佳。
RetinaNet(14)通过Focal Loss 来抑制负样本对最终损失的贡献以提升网络的整体表现。
-
两阶段模型:在两阶段模型中,由于含有独立的候选区域提取步骤,第一步就可以筛选掉大部分不含有待检测物体的区域(负样本),在传递给第二步进行分类和候选框位置/大小修正时,正负样本的比例已经比较均衡,不存在类似的问题。
-
-
摘要:两阶段模型修正了两次候选框,单阶段模型没有修正,所以单阶段模型质量较差
-
两阶段模型:在候选区域提取的过程会对候选框的位置和大小进行修正,因此在进入第二步前,候选区域的特征已被对齐,这样有利于为第二步的分类提供质量更高的特征。
另外,两阶段模型在第二步中候选框会被再次修正,因此一共修正了两次候选框,这带来了更高的定位精度,但同时也增加了模型复杂度。
-
单阶段模型:没有候选区域提取过程,自然也没有特征对齐步骤,各锚框的预测基于该层上每个特征点的感受野,其输入特征未被对齐,质量较差,因而定位和分类精度容易受到影响。
-
-
摘要:两阶段模型在第二部对候选框进行分类和回归时,受累于大量候选框,所以两阶段模型存在计算量大、速度慢的问题。
-
两阶段模型:以Faster R-CNN为代表的两阶段模型在第二步对候选区域进行分类和位置回归时,是针对每个候选区域独立进行的,因此该部分的算法复杂度线性正比于预设的候选区域数目,这往往十分巨大,导致两阶段模型的头重脚轻(heavy head)问题。
解决:近年来虽然有部分模型(如Light-Head R-CNN[15])试图精简两阶段模型中第二步的计算量,但较为常用的两阶段模型仍受累于大量候选区域,相比于单阶段模型仍存在计算量大、速度慢的问题。
-
最新的一些基于
-
单阶段模型的物体检测方法有CornerNet[16]、RefineDet[17]、ExtremeNet[18]等
-
两阶段模型的物体检测方法有PANet[19]、Cascade R-CNN[20]、Mask Score R-CNN[21]等
下集预告:9.1.2 简单介绍两阶段模型R-CNN、SPPNet、Fast R-CNN、Faster R-CNN的发展过程
参考文献:
[1]SERMANET P, EIGEN D, ZHANG X, et al. OverFeat: Integrated recognition,localization and detection using convolutional networks[J]. arXiv preprintarXiv:1312.6229,2013.
[2]LIU W,ANGUELOV D, ERHAN D, et al. SSD: Single shot multibox detector[C]//European Conference on Computer Vision. Springer, 2016: 21-37.
[3]REDMON J,DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]//Proceedings of the IEEE Conference on ComputerVision and Pattern Recognition, 2016: 779-788.
[4] REDMON J, FARHADI A. YOLO9000: Better, faster, stronger[C]//Proceedingsof the IEEE Conference on Computer Vision and Pattern Recognition, 2017:7263-7271.
[5]REDMON J, FARHADI A. YOLOv3: An incremental improvement[J]. arXivpreprint arXiv:1804.02767,2018.
GIRSHICK R, DONAHU J,DARRELL T, et al. Rich feature hierarchies for[9]accurate object detection and semantic segmentation[C]//Proceedings of theIEEE Conference on Computer Vision and Pattern Recognition, 2014:580-587.
[7] HE K,ZHANG X, REN S,et al. Spatial pyramid pooling in deep convolutionalnetworks for visual recognition[J]. IEEE Transactions on Pattern Analysisand Machine Intelligence, IEEE, 2015,37(9):1904-1916.
[8]GIRSHICK R. Fast R-CNN[C]//Proceedings of the IEEE International Conferenceon Computer Vision, 2015: 1440-1448.
[9]REN S,HE K,GIRSHICK R, et al. Faster R-CNN: Towards real-time objectdetection with region proposal networks[C]//Advances in Neural InformationProcessing Systems, 2015:91-99.
[10] DAI J, LI Y, HE K, et al. R-FCN: Object detection via region-based fully convolutional networks[C]//Advances in Neural Information Processing Systems, 2016: 379-387.[11] HE K, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision, 2017: 2961-2969.
[12] LIU L, OUYANG W, WANG X, et al. Deep learning for generic object detection:A survey[J]. arXiv preprint arXiv:1809.02165,2018.
[13] HUANG J, RATHOD V, SUN C, et al. Speed/accuracy trade-offs for modernconvolutional object detectors[C]//Proceedings of the IEEE Conference onComputer Vision and Pattern Recognition, 2017: 7310-7311.
[14] LIN T-Y,GOYAL P,GIRSHICK R, et al. Focal loss for dense object detection[C]//Proceedings of the IEEE International Conference on Computer Vision,2017:2980-2988.
[15] LI Z, PENG C, YU G, et al. Light-head R-CNN: In defense of two-stage objectdetector[J].arXiv preprint arXiv:1711.07264,2017.
[16] LAW H, DENG J. CornerNet: Detecting objects as paired keypoints[C]//Proceedings of the European Conference on Computer Vision, 2018:734-750.
[17] ZHANG S, WEN L, BIAN X, et al. Single-shot refinement neural network forobject detection[C]//Proceedings of the IEEE Conference on Computer Visionand Pattern Recognition, 2018: 4203-4212.
[18] ZHOU X, ZHUO J,KRÄHENBÜHL P. Bottom-up object detection by groupingextreme and center points[J]. arXiv preprnt arXiv:1901.08043,2019.
[19] LIU S, QI L,QIN H,et al. Path aggregation network for instance segmentation [C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition,2018:8759-8768.
[20] CAI Z, VASCONCELOS N. Cascade R-CNN: Delving into high qualityobject detection[C]//Proceedings of the IEEE Conference on Computer Visionand Pattern Recognition, 2018:6154-6162.
[21] HUANG Z,HUANG L, GONG Y,et al. Mask scoring R-CNN[C]//Proceedings ofthe IEEE Conference on Computer Vision and Pattern Recognition,2019:6409-6418.
参考文献:
《百面深度学习》 诸葛越 江云胜主编
出版社:人民邮电出版社(北京)
ISBN:978-7-115-53097-4
2020年7月第1版(2020年7月北京第二次印刷)
推荐阅读:
//好用小工具↓
分享一个免费的chat工具
分享一个好用的读论文的网站
// 深度学习经典网络↓
LeNet网络(1989年提出,1998年改进)
AlexNet网络(2012年提出)
VGGNet网络(2014年提出)
LeNet、AlexNet、VGGNet总结
GoogLeNet网络(2014年提出)
ResNet网络(2015年提出)
相关文章:
9.1.1 简述目标检测领域中的单阶段模型和两阶段模型的性能差异及其原因
9.1目标检测 场景描述 目标检测(Object Detection)任务是计算机视觉中极为重要的基础问题,也是解决实例分割(Instance Segmentation)、场景理解(Scene Understanding)、目标跟踪(Ob…...

系统化自学Python的实用指南
目录 一、理解Python与设定目标 二、搭建学习环境与基础准备 三、入门学习阶段 四、中级进阶阶段 五、项目实践与持续深化 六、持续学习与拓展 一、理解Python与设定目标 Python概述:详细介绍Python的历史沿革、设计理念、主要特点(如易读、易维护…...

加密货币初创企业指南:如何寻找代币与市场的契合点
撰文:Mark Beylin,Boost VC 编译:Yangz,Techub News 原文来源:香港Web3媒体Techub News 在 Y Combinator 创始人 Paul Graham 《Be Good》一文中概述了初创企业如何找到产品与市场契合点的方法,即制造人…...

【十二】图解mybatis日志模块之设计模式
图解mybatis日志模块之设计模式 概述 最近经常在思考研发工程师初、中、高级工程师以及系统架构师各个级别的工程师有什么区别,随着年龄增加我们的技术级别也在提升,但是很多人到了高级别反而更加忧虑,因为it行业35岁年龄是个坎这是行业里的共…...
RainBond 制作应用并上架【以ElasticSearch为例】
文章目录 安装 ElasticSearch 集群第 1 步:添加组件第 2 步:查看组件第 3 步:访问组件制作 ElasticSearch 组件准备工作ElasticSearch 集群原理尝试 Helm 安装 ES 集群RainBond 制作 ES 思路源代码Dockerfiledocker-entrypoint.shelasticsearch.yml制作组件第 1 步:添加组件…...
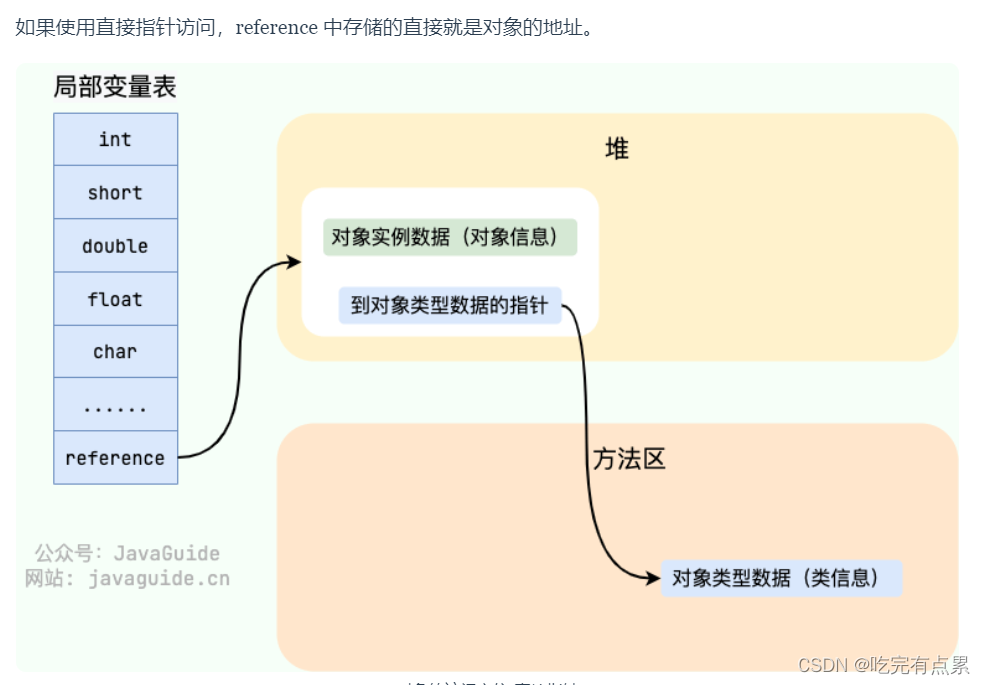
JVM相关:Java内存区域
Java 虚拟机(JVM)在执行 Java 程序的过程中会把它管理的内存划分成若干个不同的数据区域。 Java运行时数据区域是指Java虚拟机(JVM)在执行Java程序时,为了管理内存而划分的几个不同作用域。这些区域各自承担特定的任务,…...

【C++】─篇文章带你熟练掌握 map 与 set 的使用
目录 一、关联式容器二、键值对三、pair3.1 pair的常用接口说明3.1.1 [无参构造函数](https://legacy.cplusplus.com/reference/utility/pair/pair/)3.1.2 [有参构造函数 / 拷贝构造函数](https://legacy.cplusplus.com/reference/utility/pair/pair/)3.1.3 [有参构造函数](htt…...
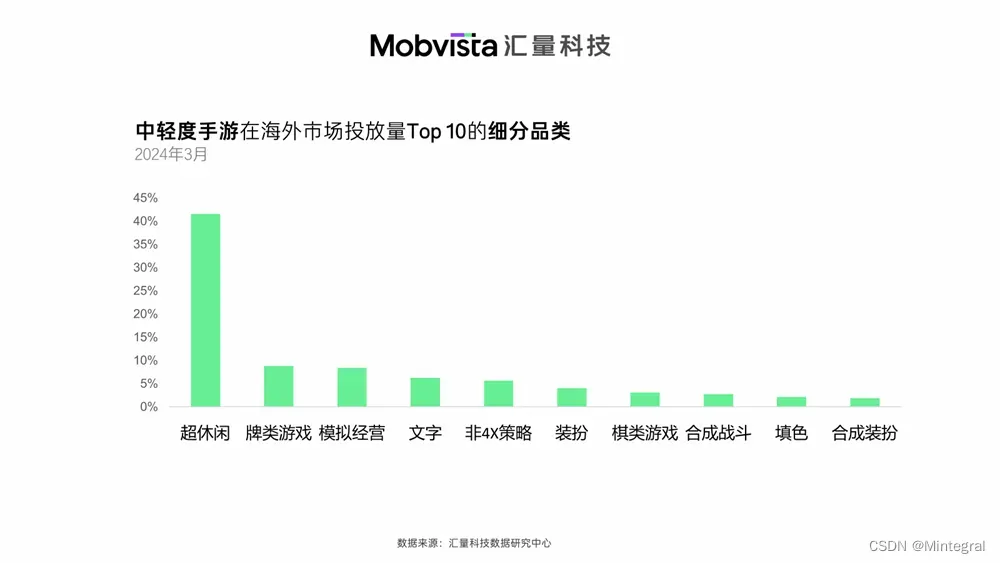
Mintegral数据洞察:全球中轻度游戏市场与创意更新频率
基于2024年3月大盘数据,汇量科技数据研究中心发现,超休闲品类仍是投流中轻度手游的中流砥柱。而投流力度较大的其他细分品类里,可以看到棋牌、模拟经营、非4X策略以及合成X游戏的身影,这些品类是近年来经常出现融合玩法的新兴赛道…...
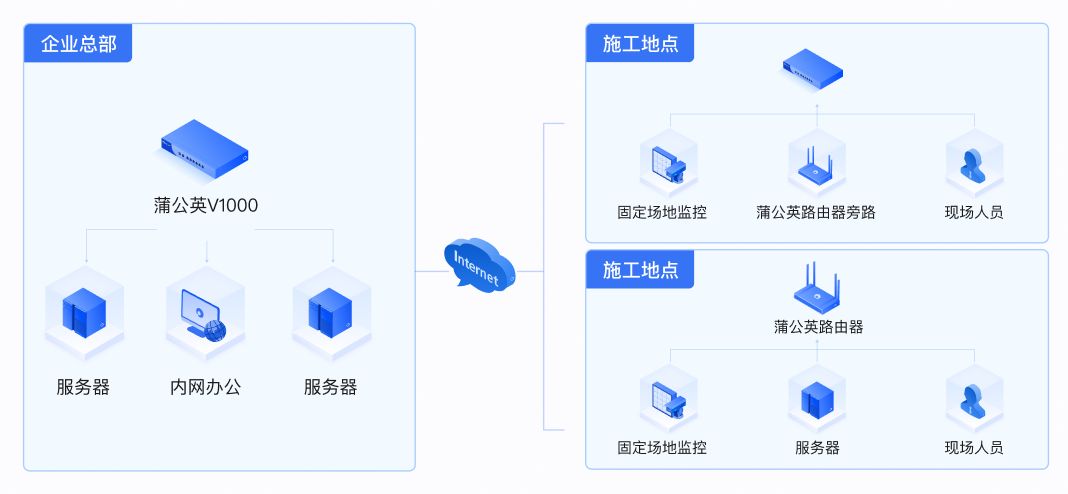
贝锐蒲公英异地组网:降低建筑工地远程视频监控成本、简化运维
中联建设集团股份有限公司是一家建筑行业的施工单位,专注于建筑施工,业务涉及市政公用工程施工总承包、水利水电工程施工总承包、公路工程施工总承包、城市园林绿化专业承包等,在全国各地开展有多个建筑项目,并且项目时间周期可能…...

大模型训练学习笔记
目录 大模型的结构主要分为三种 大模型分布式训练方法主要包括以下几种: token Token是构成句子的基本单元 1. 词级别的分词 2. 字符级别的分词 结巴分词 GPT-3/4训练流程 更细致的教程,含公式推理 大模型的结构主要分为三种 Encoder-only(自编…...

Linux C/C++时间操作
C11提供了操作时间的库chrono库,从语言级别提供了支持chrono库屏蔽了时间操作的很多细节,简化了时间操作 Unix操作系统根据计算机产生的年代把1970年1月1日作为UNIX的纪元时间,1970年1月1日是时间的中间点,将从1970年1月1日起经过…...

AI绘画工具
AI绘画工具:技术与艺术的完美融合 一、引言 随着人工智能技术的飞速发展,AI绘画工具作为艺术与技术结合的产物,已经逐渐从科幻的概念变成了现实。这些工具不仅改变了传统绘画的创作方式,还为人们带来了全新的艺术体验。本文将详…...

图相似度j计算——SimGNN
图相似性——SimGNN 论文链接:个人理解:数据处理: feature_1 [[1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], # "A"[0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0], # "B"[0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0] # "C" 第二个循环ÿ…...

大模型创新企业集结!百度智能云千帆AI加速器Demo Day启动
新一轮技术革命风暴席卷而来,为创业带来源源不断的创新动力。过去一年,在金融、制造、交通、政务等领域,大模型正从理论到落地应用,逐步改变着行业的运作模式,成为推动行业创新和转型的关键力量。 针对生态伙伴、创业…...

阿里云对象存储oss——对象储存原子性和强一致性
在阿里云对象存储oss中有俩个很重要的特性分别是原子性和强一致性。 原子性 首先我们先聊一下原子性,在计算机科学中,原子性(Atomicity)是指一个操作是不可分割的最小执行单元,要么完全执行,要么完全不执行…...

星戈瑞 CY5-地塞米松的热稳定性
CY5-地塞米松作为一种结合了荧光染料CY5与药物地塞米松的复合标记物,其热稳定性是评估其在实际应用中能否保持结构完整和功能稳定的参数。 热稳定性的重要性 热稳定性是指物质在受热条件下保持其物理和化学性质不变的能力。对于CY5-地塞米松而言,良好的…...

MongoDB CRUD操作:地理位置查询
MongoDB CRUD操作:地理位置查询 文章目录 MongoDB CRUD操作:地理位置查询地理空间数据GeoJSON对象传统坐标对通过数组指定(首选)通过嵌入文档指定 地理空间索引2dsphere2d 地理空间查询地理空间查询运算符地理空间聚合阶段 地理空…...

mysql启动出现Error: 2 (No such file or directory)
查看mydql状态 systemctl status mysqlThe designated data directory /var/lib/mysql/ is unusable 查看mysql日志 tail -f /var/log/mysql/error.logtail: cannot open ‘/var/log/mysql/error.log’ for reading: No such file or directory tail: no files remaining 第…...
上位机图像处理和嵌入式模块部署(f407 mcu中的项目开发特点)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 和soc相比较,mcu的项目规模一般不算大。因为,soc项目中,从规划、硬件开发、驱动、应用端、服务器端到测试&…...

插入排序—Java
插入排序 基本思想 :代码实现 基本思想 : 实现数组从小到大排从第二个数开始跟前面的数比较 找到合适的位置插入 后面的数往后推移 但推移不会超过原来插入的数的下标 代码实现 public static void InsertSort(int[] arr) {for(int i 1;i<arr.len…...

当今互联网安全的基石 - TLS/SSL
LS(Transport Layer Security)传输层安全协议 发展历程 TLS 是 SSL 协议的继任者。由于 SSL 协议存在一些安全漏洞,并且随着网络安全需求的不断提高,IETF(Internet Engineering Task Force)对 SSL 3.0 进…...

如何永久保存微信聊天记录?WeChatMsg终极指南让你重获数据掌控权
如何永久保存微信聊天记录?WeChatMsg终极指南让你重获数据掌控权 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trendin…...
)
告别默认样式:C# WinForm自定义最大化最小化关闭按钮实战(含资源文件管理技巧)
深度定制WinForm界面:从按钮替换到资源管理的完整解决方案 1. 为什么需要自定义窗体控制按钮? 在商业软件和创意应用中,用户界面的视觉体验往往决定了用户对产品的第一印象。WinForm作为.NET生态中成熟的桌面应用框架,其默认的窗体…...

思源宋体TTF:开源字体选型与商业价值指南
思源宋体TTF:开源字体选型与商业价值指南 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 你是否曾为商业项目的字体授权成本而困扰?是否在寻找既能满足专业设计…...

H5页面如何优雅跳转iOS App Store?解决点击后二次跳转的坑
H5页面如何优雅跳转iOS App Store?解决点击后二次跳转的坑 在移动互联网时代,H5页面与原生App的无缝衔接已经成为提升用户体验的关键环节。特别是对于电商、社交、内容平台等需要引导用户下载App的场景,如何实现从H5页面到iOS App Store的平…...

08_Claude Code之高级工作流与自动化:循环、调度与并行批处理
08 Claude Code之高级工作流与自动化:循环、调度与并行批处理 Claude Code 的真正价值在于自动化能力,而不仅仅是对话工具。本文深度讲解 Plan Mode 的量化对比(多文件重构成功率从62%到89%)、非交互批处理脚本、并行处理架构、CI…...

ESP32 TCP服务端避坑指南:从端口复用到KeepAlive,这些配置项你真的懂了吗?
ESP32 TCP服务端深度配置实战:从端口复用到KeepAlive参数调优 在物联网设备开发中,TCP服务端的稳定性往往决定着整个系统的可靠性。许多开发者在使用ESP32搭建TCP服务端时,虽然能够快速实现基础通信功能,但当面临多设备连接、网络…...

PrismML发布1比特模型:突破大模型运行困境,提升智能密度
【导语:大型模型在智能手机和数据中心运行面临难题,PrismML构建超密集智能解决方案,推出1比特Bonsai系列模型,内存占用、速度、能耗等方面表现出色,重塑模型设计方式。】超密集智能:解决大模型运行难题大型…...

别再死记硬背了!用74HC系列CMOS芯片,手把手带你理解逻辑门电平与噪声容限
74HC系列CMOS芯片实战:从数据手册到面包板的逻辑门电平全解析 当你在深夜调试一块74HC04反相器搭建的振荡电路时,示波器上本该清晰的方波却出现了毛刺和畸变——这种场景对电子爱好者来说再熟悉不过。本文将以74HC系列CMOS芯片为核心,通过五…...

EmbeddingGemma-300m与MySQL结合:大规模向量存储方案
EmbeddingGemma-300m与MySQL结合:大规模向量存储方案 1. 引言 想象一下这样的场景:你的电商平台每天新增数万条商品描述,需要快速实现语义搜索功能;或者你的内容平台有百万篇文章,想要根据用户兴趣智能推荐相关内容。…...