rtl8723DU移植 android4.4 4418 (第二部分蓝牙部分)
使用的代码:
HMI (8723bu)源码+ 567_RTL8723DU_WiFi_linux_v5.6.5.3_35502_COEX20181130-2e2e.20191025.zip
由于之前写的所有笔记没有保存,这里只能是部分。
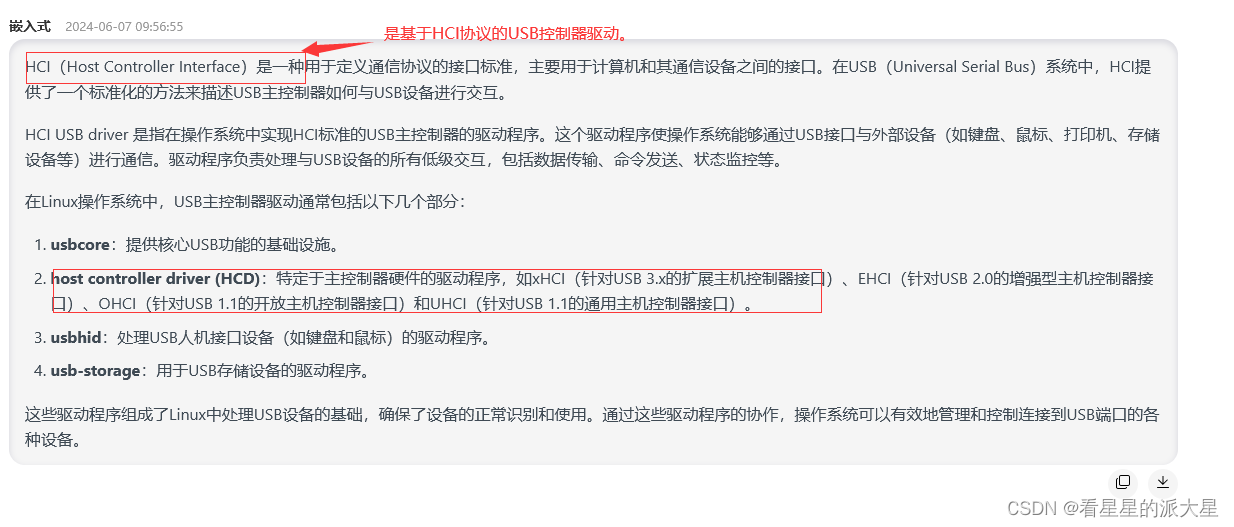
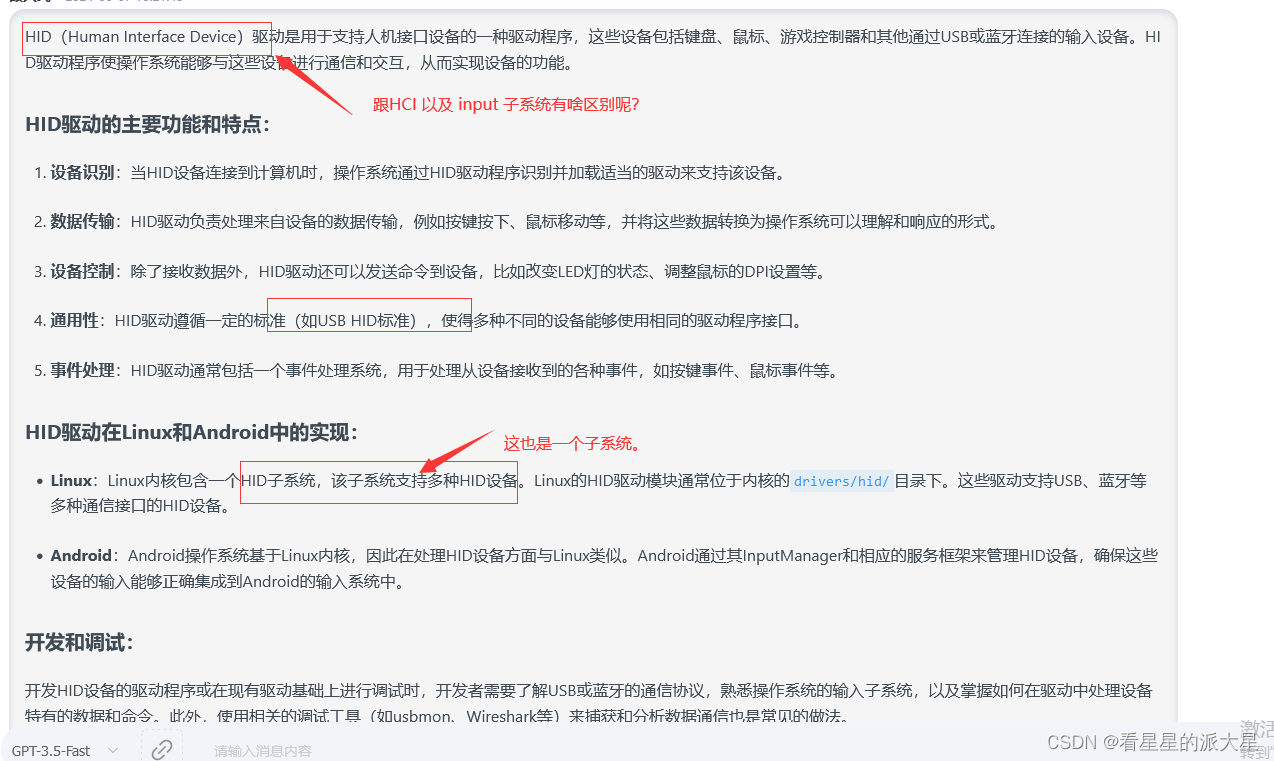
0、 前置知识

1 、kernel 的移植
2、hardwire的移植
将 驱动中的 hardware/realtek/bt 的部分整体拷贝到 源码 的,hardware/realtek/bt 下。
3、device 的移植
Bluetooth以及Bluetooth LE 的移植
拷贝 android.hardware.bluetooth.xml, android.hardware.bluetooth_le.xml 到指定的目录。

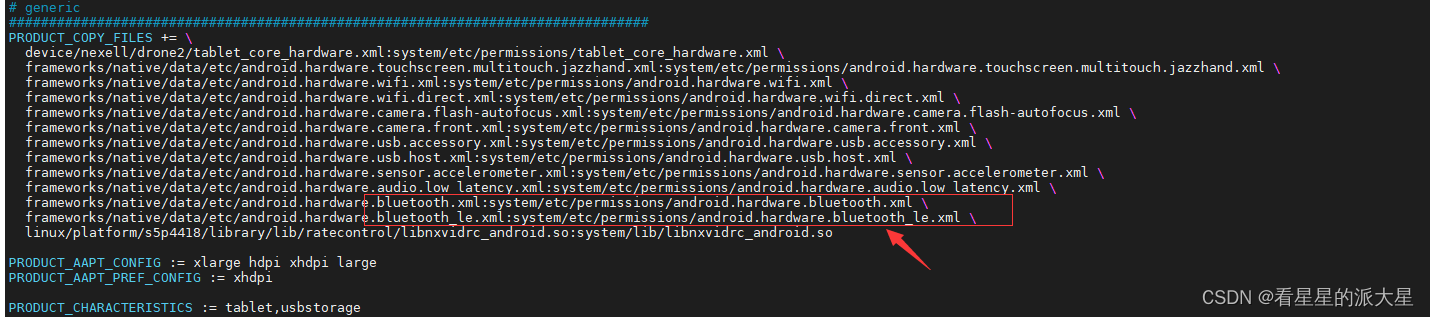
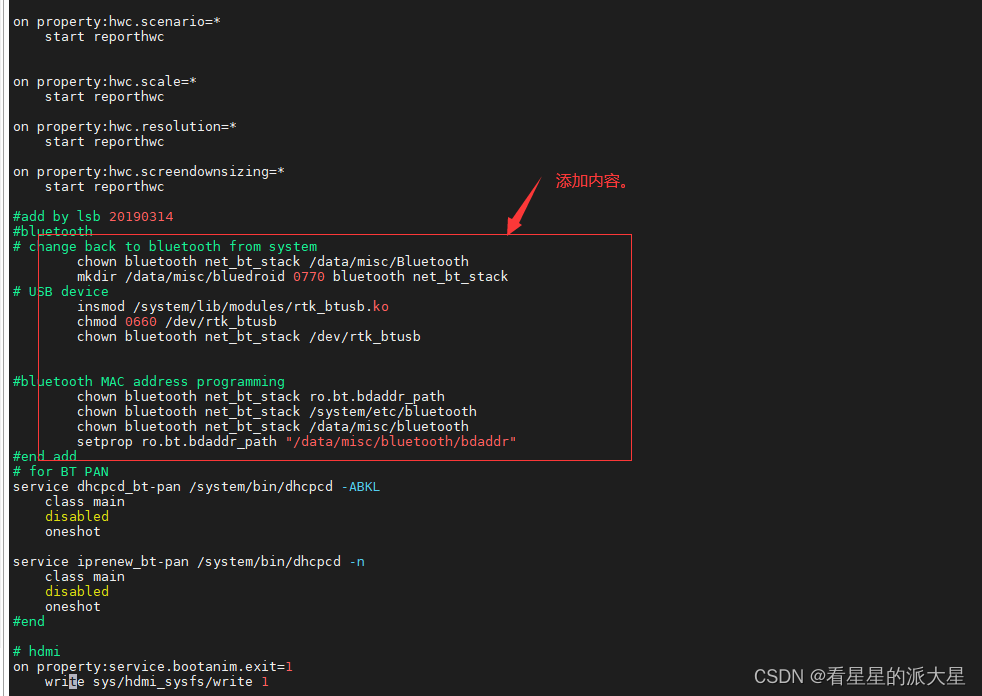
init_drone2.rc 文件的修改。
![]()
ueventd.drone2.rc 文件的修改。


4、 补丁的移植。
这里先不进行不定的移植,我使用的 HMI (8723bu)的源码,这里我对比了一下,是已经移植好不定的。
编译+烧写+测试。
连接wifi 之后依然会有报错信息。
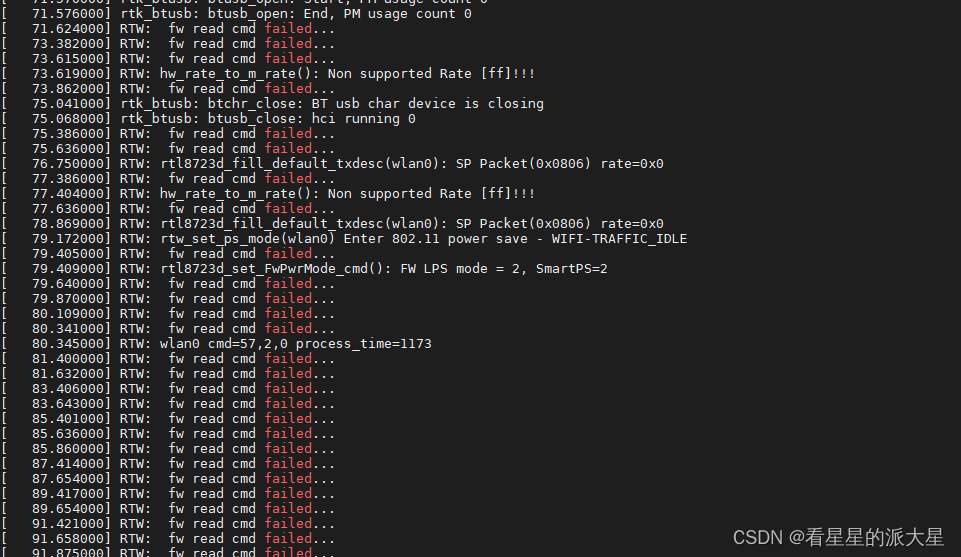
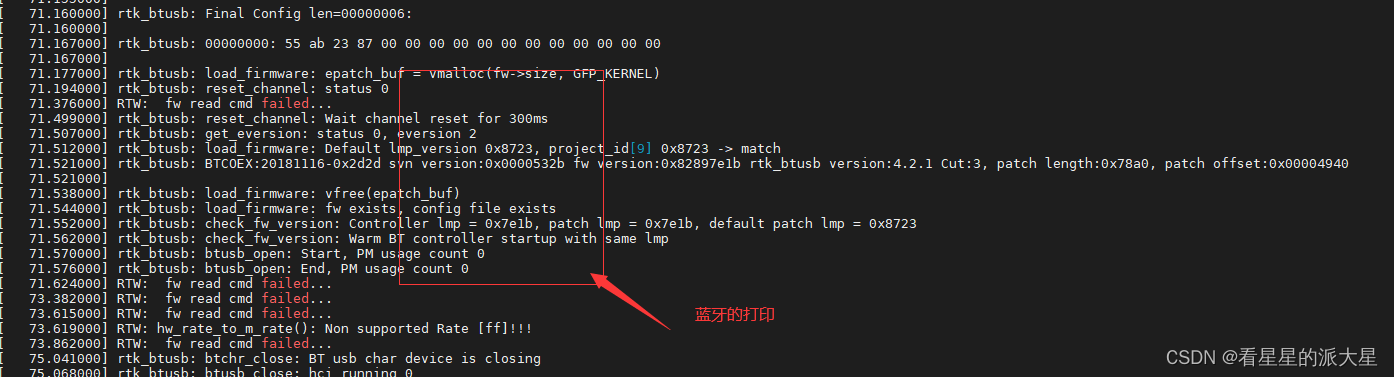
但是蓝牙不会有报错信息。
测试发现的问题:
1 图标不显示。

2 可以wifi + 蓝牙同时运行,但是不稳定,偶尔wifi 会掉,偶尔蓝牙会掉。
在联网的情况下。

进行wifi 的 收发 测试。

接下来重新移植完整的 4418 android4.4 8723du 蓝牙的源码完整移植过程。
1、 使用的源码
4418 网盘上的android4.4 源码
+
20190311_BT_ANDROID_4.4_USB_COEX_8723DU-C2d2d.tar.gz
具体的路径为:


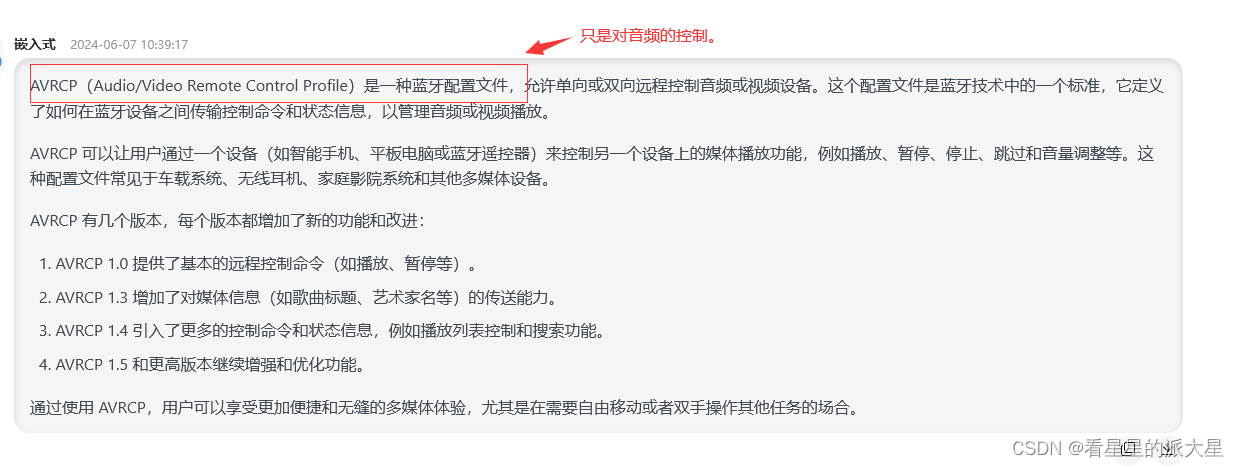
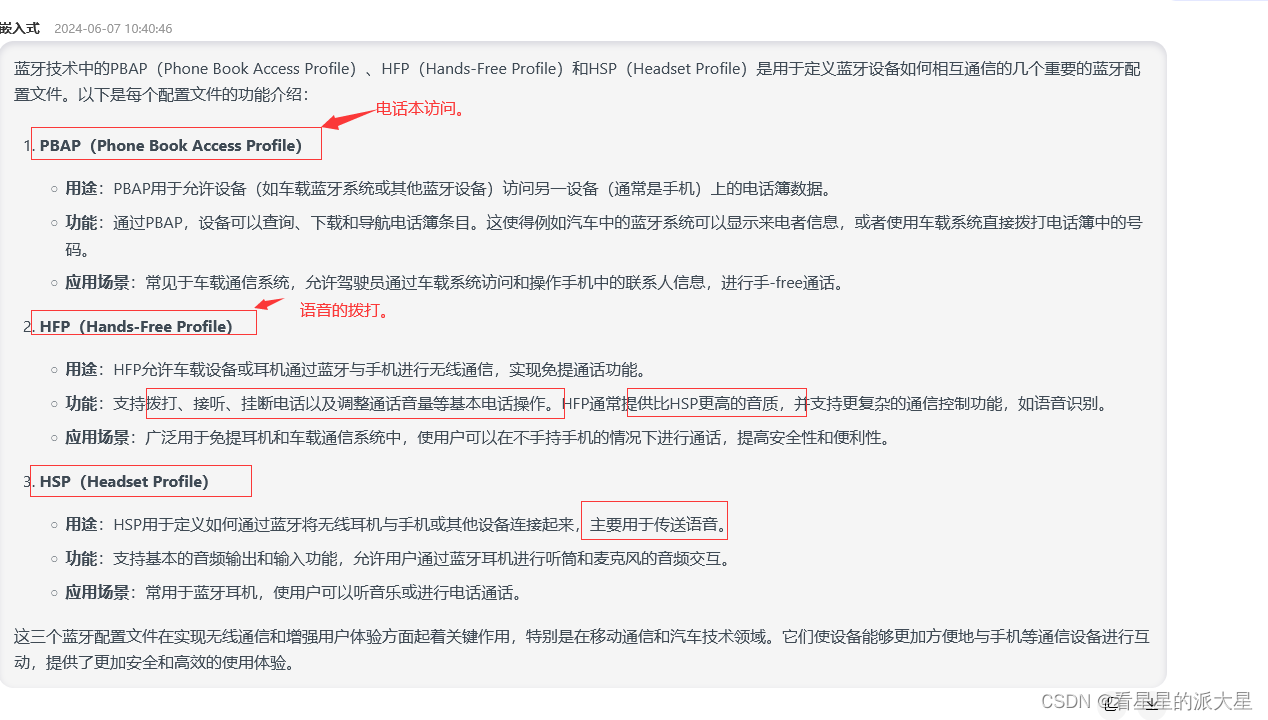
2、 蓝牙移植的基本概念
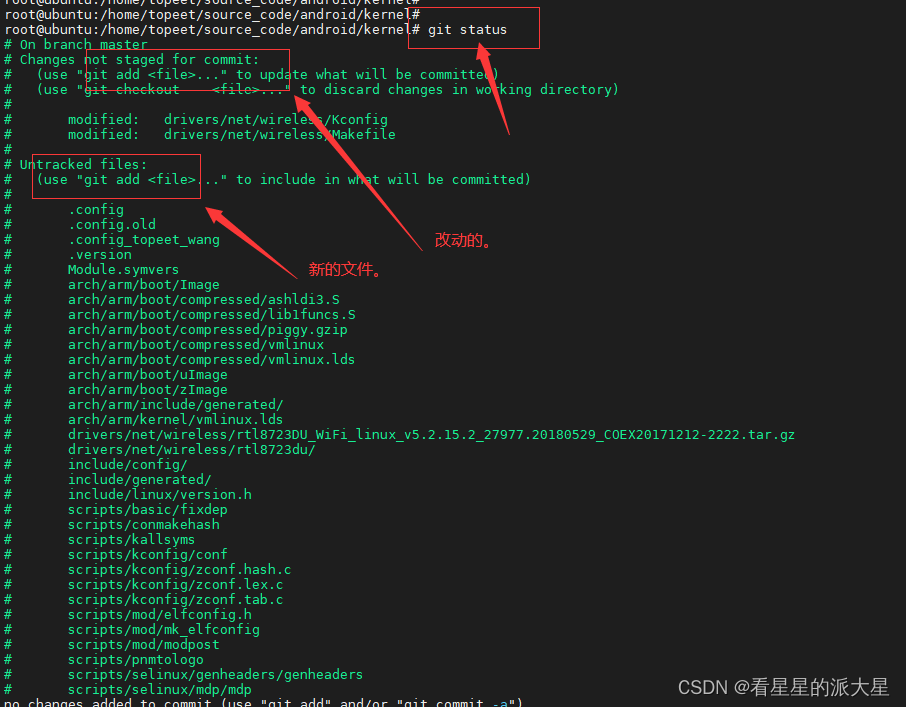
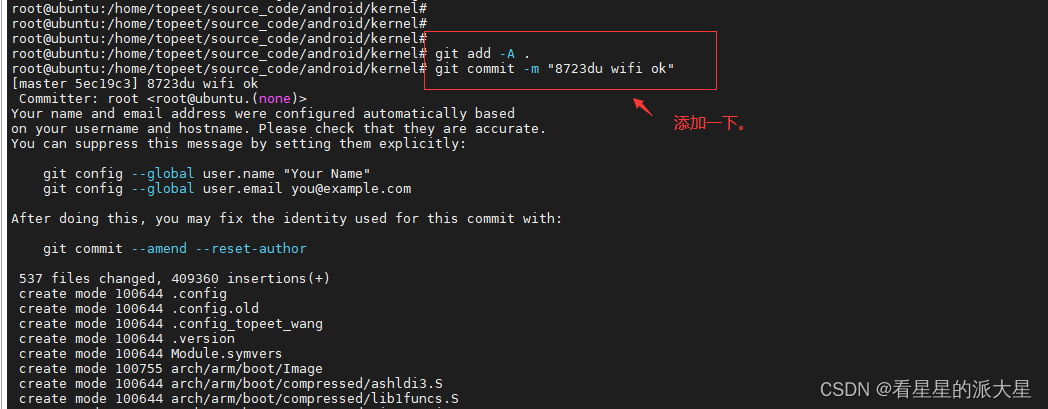
3 对于kernel 的git 的管理。

4、kernel 的移植,顺便将之前的 bluetooth 的移植的驱动去掉。
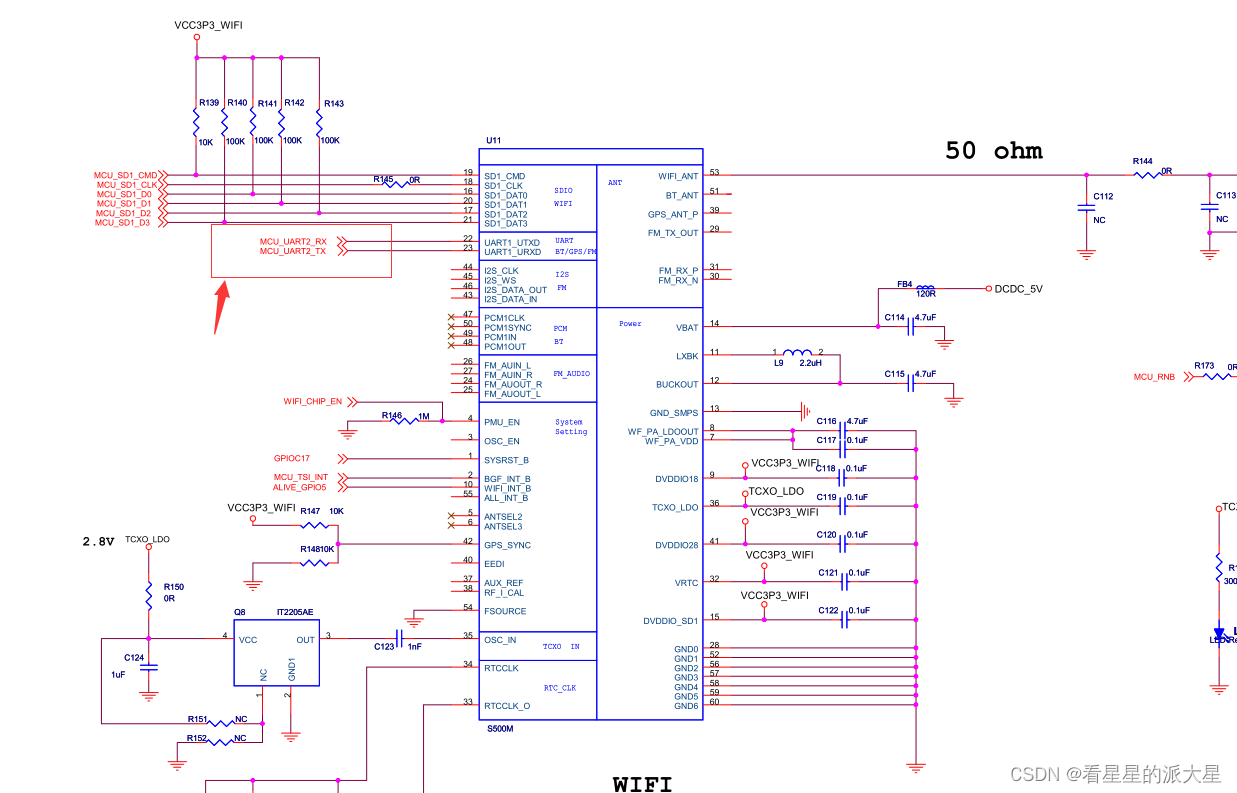
之前的BT使用的是 S500M , 通过串口进行通信。
我大致看了一下,在mencuconfig 中的设置,可以不用管。
首先移植 rtk_btusb driver
移植驱动 kernel/drivers/bluetooth/rtk_usb.* 到 kernel/driver/bluetooth 目录下
![]()
修改 Kconfig
![]()

修改Makefile
![]()
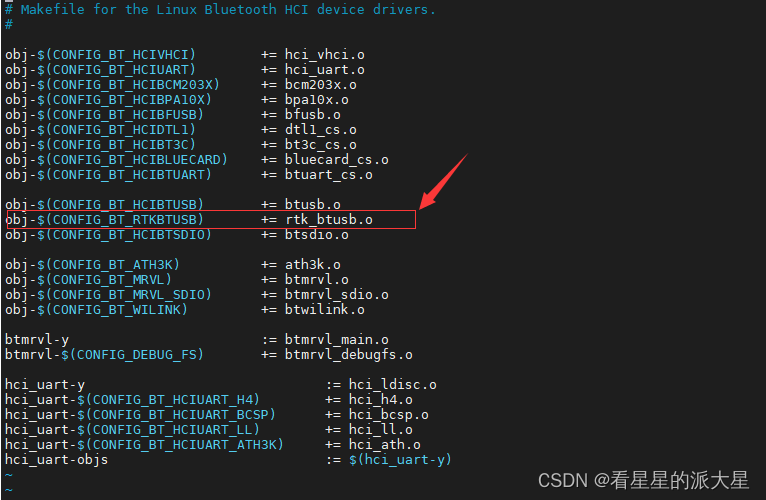
接下来 移植 uhid driver
将 uhid.c 移植到 /kernel/drivers/hid/ 目录下。
![]()
将uhid.h 移植到 / kernel/include/linux/ 目录下。
![]()
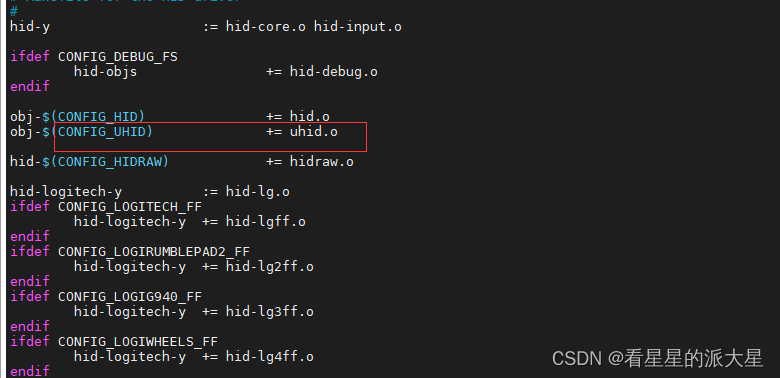
修改 Makefile + Kconfig

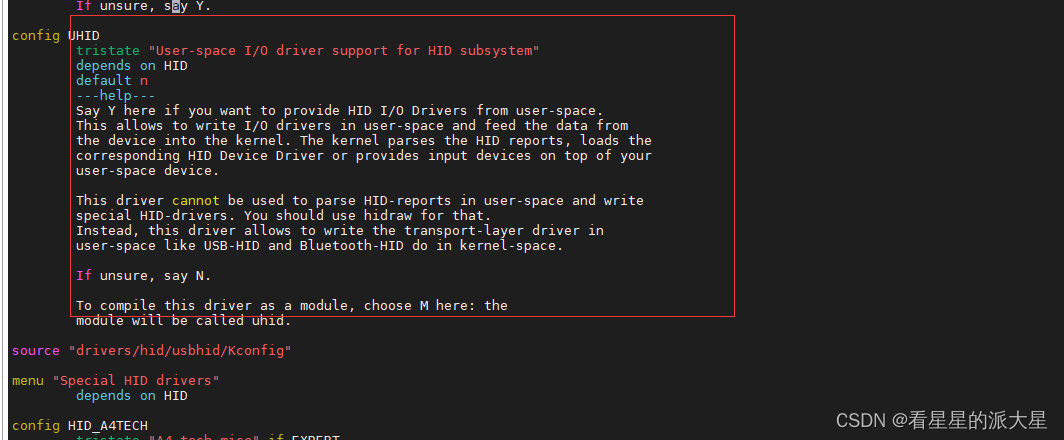
![]()
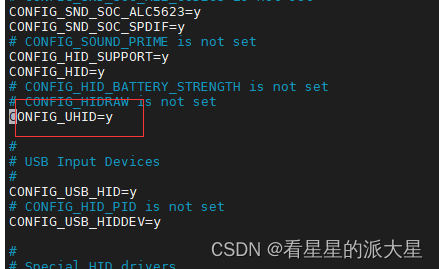
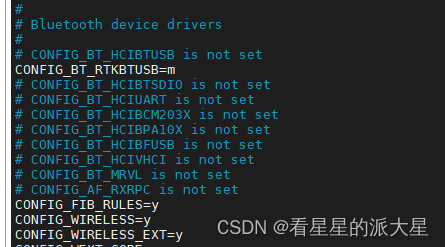
配置 menuconfig , 以支持 tk_butsb driver
CONFIG_UHID=y
CONFIG_BT_RTKBTUSB=m
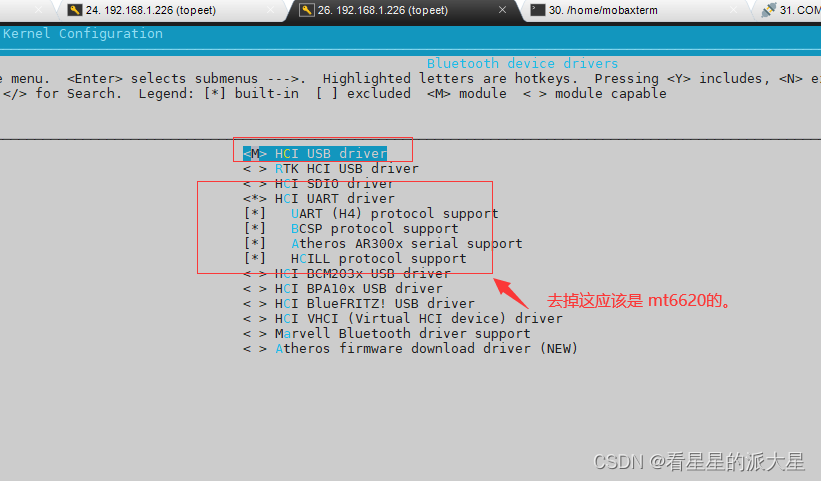
图片错了,应该是选择 RTK HCI USB
![]()
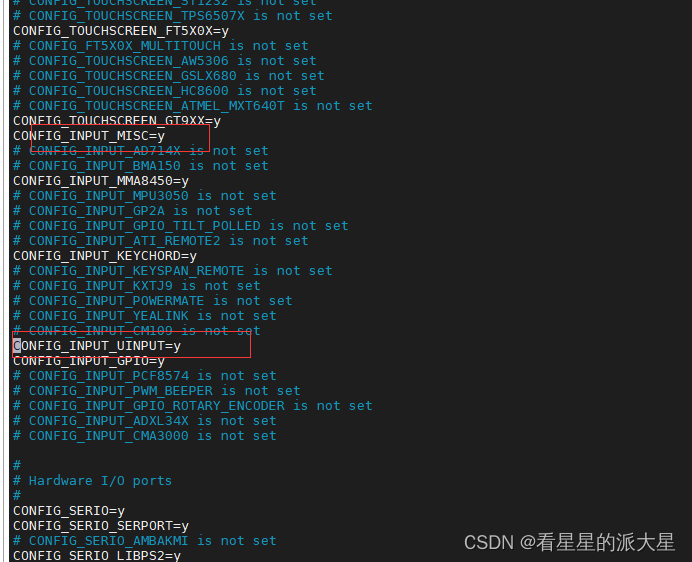
接下来移植 uinput driver
CONFIG_INPUT_UINPUT=y # User level driver support
CONFIG_INPUT_MISC=y
![]()
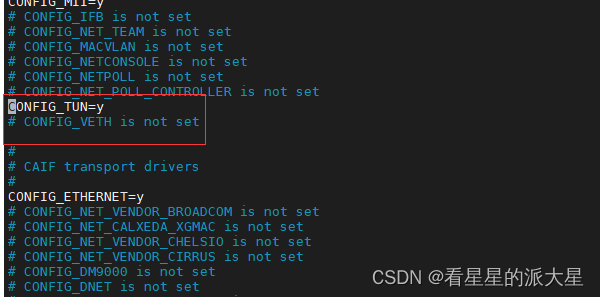
接下来是 tun driver
CONFIG_TUN=y
![]()
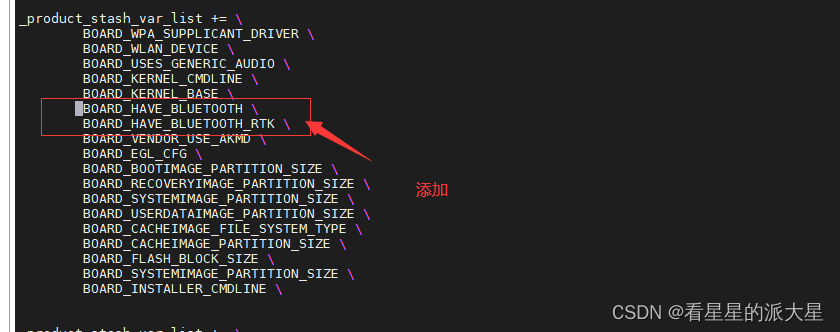
4、build 的移植。
修改1)build\core\product.mk

5、 hardwire的移植。
将驱动中的 /hardware/realtek/bt 整个拷贝到 /hardware/realtek/ 目录下。

6、device 的移植。
首先拷贝 bluetooth 目录到 android/device/nexell/drone2 目录下。
![]()
修改 Boardconfig .mk 文件。

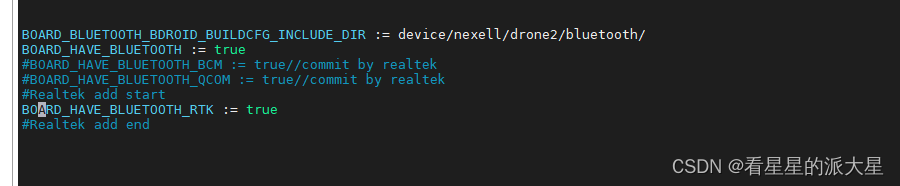
接下来修改 device.mk
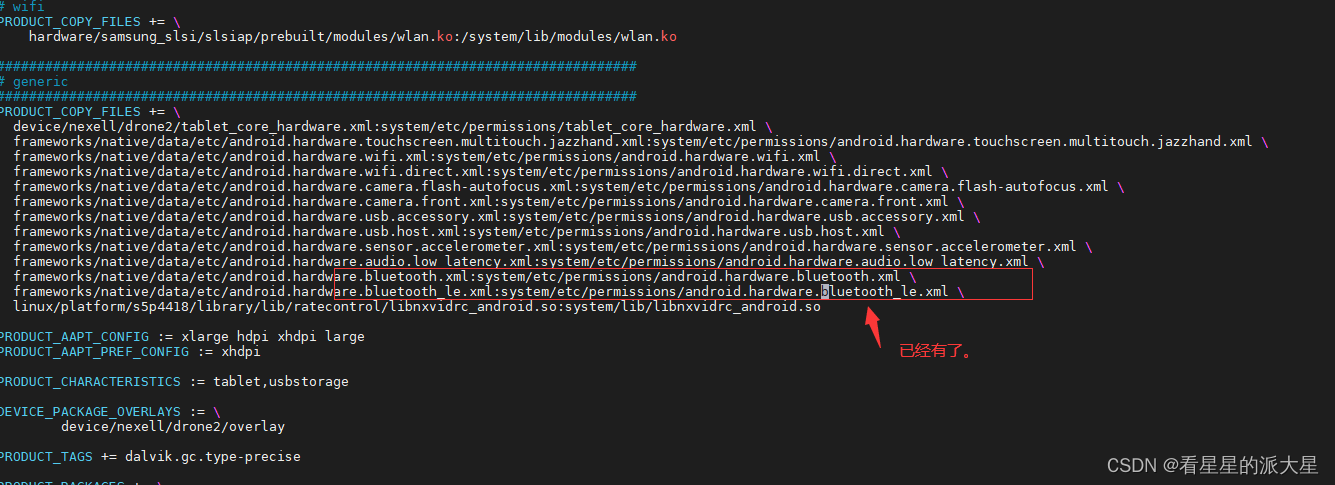
首先拷贝


然后拷贝 android.hardware.bluetooth.xml+ android.hardware.bluetooth_le.xml
接下来是修改initrc 文件。
![]()

修改 uevnetd.drone2.rc

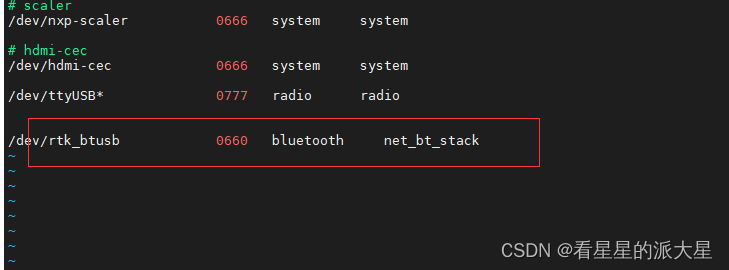
但是我觉得这里 应该是可以去掉 mt6620 的 东西的。先放下
7 、patch的移植。
相关文章:
rtl8723DU移植 android4.4 4418 (第二部分蓝牙部分)
使用的代码: HMI (8723bu)源码 567_RTL8723DU_WiFi_linux_v5.6.5.3_35502_COEX20181130-2e2e.20191025.zip 由于之前写的所有笔记没有保存,这里只能是部分。 0、 前置知识 1 、kernel 的移植 2、hardwire的移植 将 驱动中的 h…...

【Vue】组件的存放目录问题
注意: .vue文件 本质无区别 组件分类 .vue文件分为2类,都是 .vue文件(本质无区别) 页面组件 (配置路由规则时使用的组件)复用组件(多个组件中都使用到的组件) 存放目录 分类开来的…...

开发PlugLink插件:自动生成并发布博客文章
开发PlugLink插件:自动生成并发布博客文章 引言 博客已经成为个人和企业分享信息、推广产品的重要工具。然而,手动运营博客不仅耗时,而且容易出错。本文将介绍如何利用PlugLink开发一个全自动博客运营程序,通过API链接大模型&am…...
Ant Design Pro
一:Ant Design pro是什么: Ant Design Pro 是基于 Ant Design 和 umi 的封装的一整套企业级中后台前端/设计解决方案,致力于在设计规范和基础组件的基础上,继续向上构建,提炼出典型模板/业务组件/配套设计资源&#x…...

加密软件好用的是哪个?为什么这么多人说迅软DSE加密软件好用?
加密软件顾名思义就是用来对机密文件进行加密保护的,防止未经授权的人查看和篡改,保护公司的重要信息,预防泄露的事件发生,由此可见运用加密软件是有用的。那么,问题又来了哪款加密软件好呢?请看一下介绍。…...

大模型日报2024-06-07
大模型日报 2024-06-07 大模型资讯 大规模单细胞转录组学基础模型研究 摘要: 大型预训练模型已成为基础模型,在自然语言处理及相关领域取得突破。本文介绍了在单细胞转录组学领域应用大规模基础模型的研究进展。 MMLU-Pro:评估语言理解模型的新基准 摘要…...
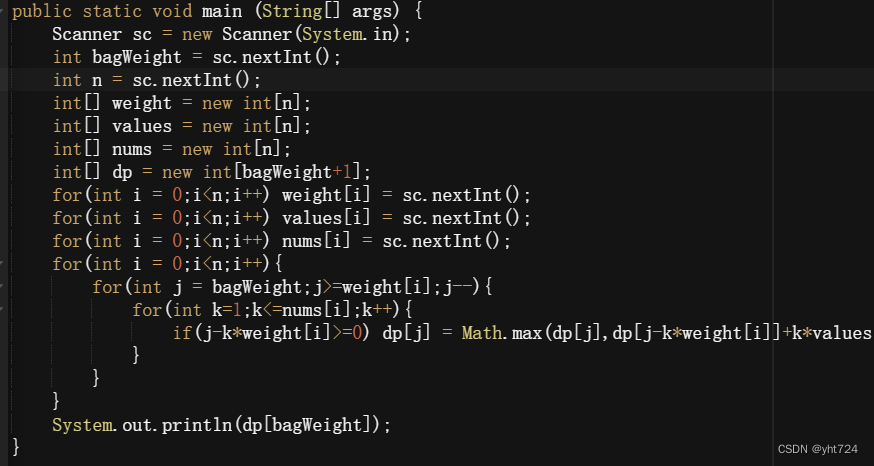
Day49 动态规划part08
LC139单词拆分(未掌握) 未掌握分析:将字符串s中的各个字符看成是背包,思考成了多重背包问题单词就是物品,字符串s就是背包,单词能否组成字符串s,就是问物品能不能把背包装满。拆分时可以重复使用字典中的单词…...
React -- memo允许你的组件在 props 没有改变的情况下跳过重新渲染。
memo(Component, arePropsEqual?) 使用 memo 将组件包装起来,以获得该组件的一个 记忆化 版本。通常情况下,只要该组件的 props 没有改变,这个记忆化版本就不会在其父组件重新渲染时重新渲染。但 React 仍可能会重新渲染它:记忆化…...

路径
自学python如何成为大佬(目录):https://blog.csdn.net/weixin_67859959/article/details/139049996?spm1001.2014.3001.5501 用于定位一个文件或者目录的字符串被称为一个路径。在程序开发时,通常涉及两种路径,一种是相对路径,另一种是绝对…...

逆波兰表达式
目录 一、定义 二、算法步骤 三、代码实现 一、定义 逆波兰表达式又叫做后缀表达式,是一种没有括号,并严格遵循“从左到右”运算的后缀式表达方法。 二、算法步骤 1、首先构造一个运算符栈,此运算符在栈内遵循越往栈顶优先级越高的原则。 …...
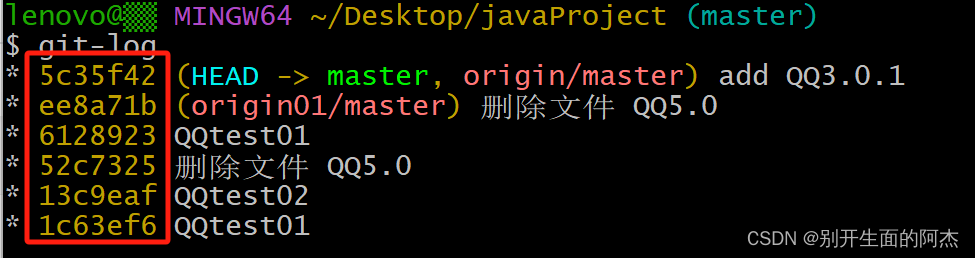
git(其六)--总结
配置基础信息 //1.配置用户名和邮箱 git config --global user.name "带着引号写一个昵称" git config --global user.email "带着引号写一个邮箱"//2.建立一个git本地库 git init//3.查看本地内容 git status //可以看到那些处于待加入本地库的文件&a…...

kafka-生产者拦截器(SpringBoot整合Kafka)
文章目录 1、生产者拦截器1.1、创建生产者拦截器1.2、KafkaTemplate配置生产者拦截器1.3、使用Java代码创建主题分区副本1.4、application.yml配置----v1版1.5、屏蔽 kafka debug 日志 logback.xml1.6、引入spring-kafka依赖1.7、控制台日志 1、生产者拦截器 1.1、创建生产者拦…...

每日一题:聊聊 Redis 过期键的删除策略
聊聊 Redis 过期键的删除策略 答案 惰性删除 :只会在取出 key 的时候才对数据进行过期检查;这样对 CPU 最友好,但是可能会造成太多过期 key 没有被删除(占用内存)。 通过定时器实现(时间事件)&…...

边缘计算的AI小板——OrangePi AI Pro
简介 OrangePi AI Pro是一款基于Allwinner H6处理器的嵌入式AI计算设备,适用于物联网和边缘计算。它具有强大的性能、低功耗、多接口和小尺寸。 本文分为三个部分: 一、对该板进行简单的开箱介绍。 二、 将SD卡中的系统迁移到由于该板支持SD卡、SSD…...
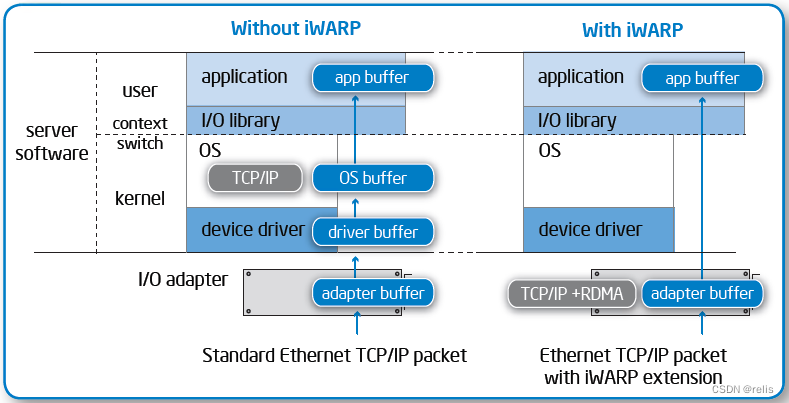
RDMA (2)
iWARP(RDMA)怎么工作的 招式1:bypass内核 非iWARP时,当应用向网络适配器发出读或者写命令时,命令穿过用户空间以及内核空间,因此需要在用户空间和内核空间间进行切换。 iWARP使用RDMA,让应用直接将命令送达到网络适配器。这规避了对内核的调用,减少了开销和延迟。 招式2…...

vue.config.js中,devServer对象用于配置开发服务器的行为
devServer: {hot: true, // 启用模块热替换(Hot Module Replacement,HMR)。liveReload: true, // 启用页面自动刷新。当热更新失败时,将回退到页面自动刷新。open: true, // 启动服务器后自动打开浏览器。port: 8080, // 设置开发…...

JVM 运行流程
JVM 是 Java 运行的基础,也是实现一次编译到处执行的关键,那么 JVM 是如何执行的呢? JVM 执行流程 程序在执行之前先要把java代码转换成字节码(class 文件), JVM 首先需要把字节码通过一定的 方式 类加…...

android-JNI
1.2【静态库】的特点: (.a) ①静态库对函数库的链接是在编译期完成的。执行期间代码装载速度快。 ②使可执行文件变大,浪费空间和资源(占空间)。 ③对程序的更新、部署与发布不方便,需要全量更新…...

Go_unsafe包
是什么?为什么? 如何利用unsafe包修改私有成员? 结构体会被分配到一块连续的内存,结构体的地址也代表第一个成员的地址。 如何利用unsafe包获取slice和map的长度? // 利用unsafe包修改私有成员 type S struct {name …...
【HarmonyOS4学习笔记】《HarmonyOS4+NEXT星河版入门到企业级实战教程》课程学习笔记(十三)
课程地址: 黑马程序员HarmonyOS4NEXT星河版入门到企业级实战教程,一套精通鸿蒙应用开发 (本篇笔记对应课程第 20 - 21节) P20《19.ArkUI-属性动画和显式动画》 本节先来学习属性动画和显式动画: 在代码中定义动画&am…...
)
ElevenLabs Starter计划实战指南(新手必看的4步激活+2次配额翻倍技巧)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs Starter计划的核心定位与适用边界 ElevenLabs Starter 计划是面向开发者、内容创作者及小型团队推出的免费语音合成入门方案,旨在以零门槛方式提供高质量、低延迟的文本转语音&…...

Python调用Claude API实战:非官方库集成与自动化应用指南
1. 项目概述与核心价值 最近在尝试构建一些智能化的个人工作流时,我遇到了一个痛点:如何将 Anthropic 公司强大的 Claude 模型,像使用 OpenAI 的 GPT 模型那样,方便地集成到自己的脚本、应用或者自动化工具里。OpenAI 的 API 封装…...

Agnix:为AI智能体打造安全可控的操作系统级执行环境
1. 项目概述:从“智能体”到“操作系统”的范式跃迁最近在开源社区里,一个名为agent-sh/agnix的项目引起了我的注意。乍一看这个名字,agent和agnix的组合,很容易让人联想到这是又一个基于大语言模型的智能体(Agent&…...

从经典工程恶作剧看理论派与实践派的思维碰撞与团队协作
1. 项目概述:一场经典的工程恶作剧及其启示在任何一个技术团队里,总有一些故事会口口相传,成为团队文化的一部分。我今天想分享的这个故事,发生在上世纪80年代初,一个微电路设计小组里。它无关乎高深的技术突破&#x…...

智慧港口高风险作业AI实时监督技术实操解析
在智慧港口建设中,集装箱堆场、高风险作业的安全管控是核心重点,其中皮带运输、高风险作业(吊装、动火、高处、有限空间等)的安全保障,是港口运维的关键。当前,港口高风险作业普遍面临痛点:人工…...

MCP密钥安全管理的无侵入解决方案:mcp-safe-run工具详解
1. 项目概述:告别硬编码,拥抱安全的MCP密钥管理如果你和我一样,日常开发中深度依赖Claude、Cursor、Windsurf这类智能编码助手,那你肯定对Model Context Protocol(MCP)不陌生。MCP作为连接AI模型与外部工具…...

017、GPS原理与定位基础
飞控算法从入门到精通 017 | GPS原理与定位基础 一、一次深夜炸机的教训 去年在郊外调试一架四轴,飞控是自研的Pixhawk变体,GPS模块用的u-blox M8N。起飞后悬停正常,切到Loiter模式后飞机开始缓慢漂移,大约30秒后突然朝东北方向加速,我切回Stabilize已经来不及——眼睁…...

列车主动悬架超磁致伸缩作动器动力学【附模型】
✨ 长期致力于超磁致伸缩作动器、主动悬架、动力学建模、特性分析、Simulink仿真研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)非均匀磁场下的多物理…...

CanFestival回调函数避坑指南:为什么你的RPDO参数修改了却没生效?
CanFestival回调函数深度解析:RPDO参数修改失效的五大隐蔽原因与实战解决方案 在工业自动化领域,CanFestival作为开源的CANopen协议栈,被广泛应用于各类嵌入式设备中。然而,许多开发者在配置RPDO(接收过程数据对象&…...

边缘AI与TinyML在医疗影像筛查中的实战:从模型轻量化到临床部署
1. 项目概述:当AI成为医生的“仿生眼”在医疗诊断领域,尤其是癌症早期筛查中,人类医生的经验与肉眼观察长期是金标准。然而,这个标准背后隐藏着巨大的不确定性:研究显示,即便是标准的放射影像学检查&#x…...