机器看世界
博主简介
博主是一名大二学生,主攻人工智能研究。感谢让我们在CSDN相遇,博主致力于在这里分享关于人工智能,c++,Python,爬虫等方面知识的分享。 如果有需要的小伙伴可以关注博主,博主会继续更新的,如果有错误之处,大家可以指正。
专栏简介: 本专栏主要研究计算机视觉,涉及算法,案例实践,网络模型等知识。包括一些常用的数据处理算法,也会介绍很多的Python第三方库。如果需要,点击这里 订阅专栏 。
给大家分享一个我很喜欢的一句话:“每天多努力一点,不为别的,只为日后,能够多一些选择,选择舒心的日子,选择自己喜欢的人!”
目录
计算机眼里的图像
计算机视觉的起源
马尔计算视觉
主动和目的视觉
多视几何和分层三维重建
基于学习的视觉
计算及视觉的难点
专栏研究方向
传统图像处理之OpenCV的妙用
OpenCV安装
OpenCV模块
OpenCV的基本操作
OpenCV数据存取
OpenCV图像缩放
OpenCV图像裁剪
OpenCV图像旋转
从摄像头读取
矩阵操作
计算机眼里的图像
图像一直以直观著称,一张图像包含的信息很多,所谓一图胜千言,对于人类来说,理解图像很方便,几乎是一眼就能理解图像表达的意思,科学研究表明这是因为人的大脑有一套注意力集中机制,对于图像中的海量信息,人脑能快速地找到其中最重要的信息。但是,计算机该如何去理解?这就涉及到了计算机视觉的知识,本专栏就是来描述计算机视觉。
计算机视觉的起源
1982年《视觉》(Marr,1982)一书的问世,标志着计算机视觉这门学科的诞生。此后,计算机视觉经历了四个阶段,第一个阶段,马尔计算视觉;第二个阶段,主动和目的视觉;第三阶段,多视几何和分层三维重建;第四个阶段,基于学习的视觉。四个阶段算然是依次进行的,但不能说哪一个好,哪一个不好,只是后者比前者更加顺应当时的时代。
马尔计算视觉
马尔计算视觉的主要思想是大脑可以快速完成三维重建,马尔认为,三维重建是可以完全靠计算来实现。他认为图象是物理实体在视网膜上的投影,所以理解了物理信息,就可以理解图像信息。简而言之,其计算机视觉计算理论就是要“挖掘物体的物理属性来完成对应的视觉问题”。其意义完在于,如果简单地从数学角度出发,很多图像具有歧义性。
主动和目的视觉
马尔视觉的泛化性不够理性,很难在工业界实现,可以想象,由计算机对任何物体做三维重建是多么困难。美国的R.Bajcsy教授,提出了主动视觉的概念,主要思想视觉要有目的性,例如在一张百人合影里面,人能轻松地找到自己的位置,或者自己好友的位置,而对其他人“视而不见”。三维重建并非视觉的目的,找到想看到的图像才是根本目的。
多视几何和分层三维重建
随着主动视觉昙花一现,多视几何走向繁荣,多视几何的代表性人物有法国的O.Faugeras、美国的R.Hartely和英国的A.Zisserman等。多视几何的目的是增加三维重建算法的效率和精度,使其能真正落地。三维重建就是从图像中选取合适的图像集,然后对拍摄位置信息进行标定并重建出场景的三维结构。
基于学习的视觉
基于学习的视觉是本书的主要内容,以机器学习为主要手段,包括流形学习和深度学习两大流派。
流形学习时域2000年,但是在后面的研究中发现,多数情况下流形学习的结果还不如传统的降维方法,如主成分分析和线性判别分析等。
深度学习虽然是近几年才火起来的,但是其效果非常好,并且模型层出不穷。深度学习更像是实践科学,和前几个阶段不同,并非有很完善的理论支持。往往在不停的尝试中,模型得到改善。在静态物体识别中,卷积神经网络已经超过人类的准确度。
计算及视觉的难点
计算机视觉的难点有两点:三维重建和鲁棒性。
三维重建之所以对人类来说非常简单,主要是因为人本身就生活在三维世界中,而计算机却是一个二维“生物”。就像我们去构建四维世界的东西,就会觉得非常困难,根本无从下手。对于计算机来说,完成三维世界的图像构建,对于他来说,无疑是降维打击。所以这才需要人类的帮助,让计算机能够识别图像。
鲁棒性的问题简单地说就是先验知识和注意机制问题。对于人来说,即使只是轮廓,或者很模糊的照片,也能大致猜测出图片的内容。但是计算机就不行,他对图像的识别都有很严格的限制,改变颜色,形状。模糊程度等,都会让计算机识别精度下降。这就是鲁棒性问题。
专栏研究方向
在介绍这篇专栏前,我先解释一下,博主之前一直在更新人工智能算法专栏,由于人工智能算法涉及到的面很广,知识面太过复杂,其中,就包含了深度学习,所以,博主打算出一期计算机视觉的专栏,先介绍一下,这样学习人工智能算法会简单很多。博主更新完计算机视觉专栏后,会继续更新人工智能算法。在这里给大家说一声抱歉!
计算机视觉主要研究方向有图像识别,目标检测,图像分割,目标跟踪等。
图像识别,也叫图像分类,可以分为i物种级分类,子类分类和实例级分类,主要模型有VGG,GoogleNet,RestNet等,常用的数据库有Minist手写数字,carfil10,cifar100,ImageNet等。
目标检测,拥有识别物体类别,还需要框出物体位置信息,例如智能相机,还能标注出人脸的位置。传统的,我们可以用OpenCV来解决这类问题,但是召回率低。常用的模型有Fast R-CNN,YOLO和SSD等。
图像分割,计算机视觉中最高层次的理解范畴。目标就是把图像分割成具有相似特性的若干个区域,并使他们对因物体的不同部分或不同的物体。常用的模型是全卷积神经网络。
目标跟踪也可以看成连续的目标检测,目的就是在视频中对物体进行连续跟踪。目标跟踪常用在监控系统中。跟踪算法可以被分为生成式和判别式两大类别。深度学习主要用在判别模式上,著名的模型有SO-DLT和FCNT等。不同于目标检测、物体识别等领域深度学习一家独大的形式,深度学习在目标跟踪方向还未能达成垄断地位,其主要难点在于数据缺失和物体快速移动。
提到深度学习相关的计算机视觉,不得不提到最近流行的风格迁移,以及GAN生成式对抗网络。例如现在使用的ZAO就是运用了此技术。
传统图像处理之OpenCV的妙用
OpenCV(Open Source Computer Vision Library)顾名思义就是开源的计算机视觉库,采用C,C++编写,也提供了Python和Matlab等语言的接口,并且在各大操作平台均可使用。OPenCV不只是一个简单的提供了计算机视觉常用的操作,更对其中关键算法进行了优化和提速,从而可以进行多线程处理。
OpenCV安装
pip install opencv-python
如果下载速度太慢,可以考虑使用镜像:
pip install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple
OpenCV模块
CUDA-accelerated Computer Vision:CUDA加速模块。
Core functionality:和兴功能模块,包含各种c++操作,接口,矩阵运算。
Image Processing:图像处理模块,包含图像处理四大任务。
Image file reading and writing:图像读取和保存模块。
Video I/O:视频读取和保存模块。
Video Analysis:视频分析模块。
Camera Calibration and 3D Reconstruction:相机校准和3D重建模块。
2D Features Framework:2D功能框架模块。
Objecneural Dection: 目标检测模块。
Deep Network module:深度学习模块
Machine Learning:机器学习模块。
Clustering and Search in Multi-Dimensional Spaces::多维空间模块。
Computational Photography:计算摄影模块。
Images stitching:图像拼接模块。
G-API framework:图论框架模块。
ArUco Marker Detection:ArUco表i==标记检测模块。
Improved Background-Foreground Segmentation Methods:背景,前景分割模块。
Biologically inspired vision models and derivated tools:基于生物的视觉模型和工具模块。
Custom Calibration Pattern for 3D reconstruction:传统模式三维重建模块。
OpenCV的基本操作
OpenCV数据存取
opencv支持各种类型与格式的图像数据,读取方式非常简单,使用imread函数即可,该函数有两个参数,第一个参数path指图片路径,第二个参数flag表示读取方式,默认值为从v.IMREAD_COLOR,默认读取彩色图片,可选值为cv2.IMREAD_GRAYSCALE和cv2.IMREAD_UNCHANGED默认颜色空间是BGR而非常用的FGB。
import cv2 img=cv2.imread('F:\Image\\test1.jpg',cv2.IMREAD_COLOR) cv2.imshow('图片名字',img) cv2.waitKey(0) #保存图片 cv2.imwrite('图片文件.png',img) #第一个参数是保存图片文件的名字,第二个是后缀
OpenCV图像缩放
当数据集的图像大小不一样时,我们就需要用到图像缩放,使所有的图片大小保持一致,函数时cv2.resize(),第一个参数是目标图像,第二个参数是缩减比例。
import cv2
import numpy as np
#读取图片
img=cv2.imread('F:\Image\\test2.jpg',cv2.IMREAD_COLOR)
cv2.imshow('原有的图片',img)
#进行缩放
img=cv2.resize(img,(1000,1000)) #比例放缩1000:1000
#显示图片
cv2.imshow('图片缩放',img)
cv2.waitKey(0)
OpenCV图像裁剪
普通图像的裁剪非常简单,由于读取的图像存储方式时矩阵,所以我们只需取矩阵的一部分就完成了裁剪。


import numpy as np
import cv2
img=cv2.imread('F:\Image\\test3.jpg',cv2.IMREAD_COLOR)
cv2.imshow('裁剪前',img)
patch=img[0:50,0:50]
#取左上角50x50小块
cv2.imshow('裁剪过后的图片',patch)
cv2.waitKey(0)当然,虽然我们不知道图片的大小,所以裁剪的时候很麻烦,这时我们就可以随机裁剪,l利用random模块:
import numpy as np
import cv2
import random
img=cv2.imread('F:\Image\\test3.jpg',cv2.IMREAD_COLOR)
#得到图像形状
w,h,d=img.shape
cv2.imshow('裁剪前',img)
x=random.randint(0,w)
y=random.randint(0,h)
patch=img[x:w,y:h]
#取左上角50x50小块
cv2.imshow('裁剪过后的图片',patch)
cv2.waitKey(0)

OpenCV图像旋转
图像旋转也是重要的操作,当图像的方向为非水平方向时,就需要通过旋转成水平方向。
在OpenCV中,图像旋转有两种实现方式:
第一种主要通过仿射变换,所用函数为cv2.warpAffine(),此函数有三个参数:分别为需要旋转的图像,仿射变换矩阵,以及输出图像的大小。
仿射变换,也称仿射映射,是指一个向量空间通过一次线性变换后,变为另一个空间。可以用如下公式表示:
其中矩阵A表示旋转与缩放,向量b表示平移。
(1)旋转变换,顺时针旋转
(2)缩放变换,水平方向为a倍,竖直方向变为b倍。
代码展示:
import numpy as np import cv2 img=cv2.imread('F:\Image\\test4.jpg',cv2.IMREAD_COLOR) w,h,d=img.shape #放射变换矩阵 M=np.array([[0,0.5,-10],[0.5,0,0]]) #旋转图片 img1=cv2.warpAffine(img,M,(w,h)) #显示图片 cv2.imshow('图片旋转',img) cv2.waitKey(0)

第二种使用OpenCV内置函数,所用的函数为cv2.getRotationMatrix2D(),此函数共三个参数,分别为图片旋转中心,逆时针旋转角度,以及缩放的倍数。和裁剪一样,这里也可以使用random()实现随机选择和平移功能。
import numpy as np import cv2 img=cv2.imread('F:\Image\\test4.jpg',cv2.IMREAD_COLOR) img1=cv2.getRotationMatrix2D((1,1),90,1) cv2.imshow('图片旋转',img1) cv2.waitKey(0)
从摄像头读取
OpenCV不仅能对图像进行处理,还能对视频进行处理,我们也可以直接调用摄像头进行计算机获取视频。函数是cv2.VideoCapture()函数,此函数只有一个参数,0为计算机摄像头,1为其他来源。
import cv2
import numpy as np
capture=cv2.VideoCapture(0)
while(True):#读取一帧ret,frame=capture.read()#显示一帧
cv2.imshow('capture',frame)
#关闭摄像头
capture.release()读取视频后,可以用cv2.VideoWriter()函数创建视频保存器即可。和读取的时候一样,也需要一帧一帧的保存,使用从cv2.putText()函数,可选参数为帧名称,帧标题,标题位于左上角坐标,字体,字体大小,颜色,字体粗细。
#从摄像头读取并保存录像
import cv2
import numpy as np
#创建摄像头
capture=cv2.VideoCapture(0)
#帧率
fps=60
#保存格式(mp4)
fourcc=cv2.VideoWriter_fourcc(*'mp4v')
#创建保存器
vout=cv2.VideoWriter()
vout.open('F:\Image\\temp.mp4',fourcc,fps,(1280,720),True)
#读取一帧并保存
for i in range(100):_,frame=capture.read()cv2.putText(frame,str(i),(10,20),cv2.FONT_HERSHEY_PLAIN,1,(0,255,0),1,cv2.LINE_AA)vout.write(frame)
#释放资源
vout.release()
capture.release()
这样,就可以实现对摄像头的调用。你就可以知道谁打开了你的电脑。
矩阵操作
add 矩阵加法,A+B的更高级形式,支持mask
scaleAdd 矩阵加法,一个带有缩放因子dst(I) = scale * src1(I) + src2(I)
addWeighted 矩阵加法,两个带有缩放因子dst(I) = saturate(src1(I) * alpha + src2(I) * beta + gamma)
subtract 矩阵减法,A-B的更高级形式,支持mask
multiply 矩阵逐元素乘法,同Mat::mul()函数,与A*B区别,支持mask
gemm 一个广义的矩阵乘法操作
divide 矩阵逐元素除法,与A/B区别,支持mask
abs 对每个元素求绝对值
absdiff 两个矩阵的差的绝对值
exp 求每个矩阵元素 src(I) 的自然数 e 的 src(I) 次幂 dst[I] = esrc(I)
pow 求每个矩阵元素 src(I) 的 p 次幂 dst[I] = src(I)p
log 求每个矩阵元素的自然数底 dst[I] = log|src(I)| (if src != 0)
sqrt 求每个矩阵元素的平方根
min, max 求每个元素的最小值或最大值返回这个矩阵 dst(I) = min(src1(I), src2(I)), max同
minMaxLoc 定位矩阵中最小值、最大值的位置
compare 返回逐个元素比较结果的矩阵
bitwise_and, bitwise_not, bitwise_or, bitwise_xor 每个元素进行位运算,分别是和、非、或、异或
cvarrToMat 旧版数据CvMat,IplImage,CvMatND转换到新版数据Mat
extractImageCOI 从旧版数据中提取指定的通道矩阵给新版数据Mat
randu 以Uniform分布产生随机数填充矩阵,同 RNG::fill(mat, RNG::UNIFORM)
randn 以Normal分布产生随机数填充矩阵,同 RNG::fill(mat, RNG::NORMAL)
randShuffle 随机打乱一个一维向量的元素顺序
theRNG() 返回一个默认构造的RNG类的对象 theRNG()::fill(…)
reduce 矩阵缩成向量
repeat 矩阵拷贝的时候指定按x/y方向重复
split 多通道矩阵分解成多个单通道矩阵
merge 多个单通道矩阵合成一个多通道矩阵
mixChannels 矩阵间通道拷贝,如Rgba[]到Rgb[]和Alpha[]
sort, sortIdx 为矩阵的每行或每列元素排序
setIdentity 设置单元矩阵
completeSymm 矩阵上下三角拷贝
inRange 检查元素的取值范围是否在另两个矩阵的元素取值之间,返回验证矩阵
checkRange 检查矩阵的每个元素的取值是否在最小值与最大值之间,返回验证结果bool
sum 求矩阵的元素和
mean 求均值
meanStdDev 均值和标准差
countNonZero 统计非零值个数
cartToPolar, polarToCart 笛卡尔坐标与极坐标之间的转换
flip 矩阵翻转
transpose 矩阵转置,比较 Mat::t() AT
trace 矩阵的迹
determinant 行列式 |A|, det(A)
eigen 矩阵的特征值和特征向量
invert 矩阵的逆或者伪逆,比较 Mat::inv()
magnitude 向量长度计算 dst(I) = sqrt(x(I)2 + y(I)2)
Mahalanobis Mahalanobis距离计算
phase 相位计算,即两个向量之间的夹角
norm 求范数,1-范数、2-范数、无穷范数
normalize 标准化
mulTransposed 矩阵和它自己的转置相乘 AT * A, dst = scale(src - delta)T(src - delta)
convertScaleAbs 先缩放元素再取绝对值,最后转换格式为8bit型
calcCovarMatrix 计算协方差阵
solve 求解1个或多个线性系统或者求解最小平方问题(least-squares problem)
solveCubic 求解三次方程的根
solvePoly 求解多项式的实根和重根
dct, idct 正、逆离散余弦变换,idct同dct(src, dst, flags | DCT_INVERSE)
dft, idft 正、逆离散傅立叶变换, idft同dft(src, dst, flags | DTF_INVERSE)
LUT 查表变换
getOptimalDFTSize 返回一个优化过的DFT大小
mulSpecturms 两个傅立叶频谱间逐元素的乘法
好了,本节的内容就到此结束了,简单的解释了一下opencv,后续内容会继续更新的,关注博主,持续更新不迷路。拜了个拜。
相关文章:
机器看世界
博主简介 博主是一名大二学生,主攻人工智能研究。感谢让我们在CSDN相遇,博主致力于在这里分享关于人工智能,c,Python,爬虫等方面知识的分享。 如果有需要的小伙伴可以关注博主,博主会继续更新的,…...
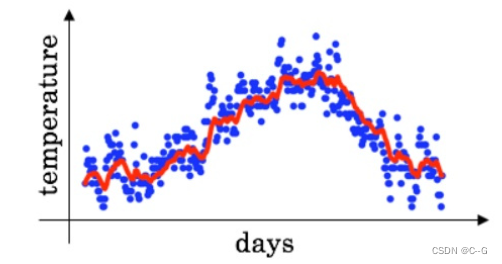
18、指数移动平均——EMA
简介 在深度学习中,经常会使用EMA(指数移动平均)这个方法对模型的参数做平均,以求提高测试指标并增加模型鲁棒。 指数移动平均(Exponential Moving Average)也叫权重移动平均(Weighted Moving…...

用Go快速搭建IM即时通讯系统
WebSocket的目标是在一个单独的持久连接上提供全双工、双向通信。在Javascript创建了Web Socket之后,会有一个HTTP请求发送到浏览器以发起连接。在取得服务器响应后,建立的连接会将HTTP升级从HTTP协议交换为WebSocket协议。由于WebSocket使用自定义的协议…...

2023年江苏省职业院校技能大赛中职网络安全赛项试卷-学生组-任务书
2023年江苏省职业院校技能大赛中职网络安全赛项试卷-学生组-任务书 2023年江苏省职业院校技能大赛中职网络安全赛项试卷-学生组-任务书第一阶段 (300分) [手敲的任务书 点个赞吧]任务一:主机发现与信息收集 (50分)任务二: 应急响应 (60分)任务三:数字取证与分析(80分)任务四:…...
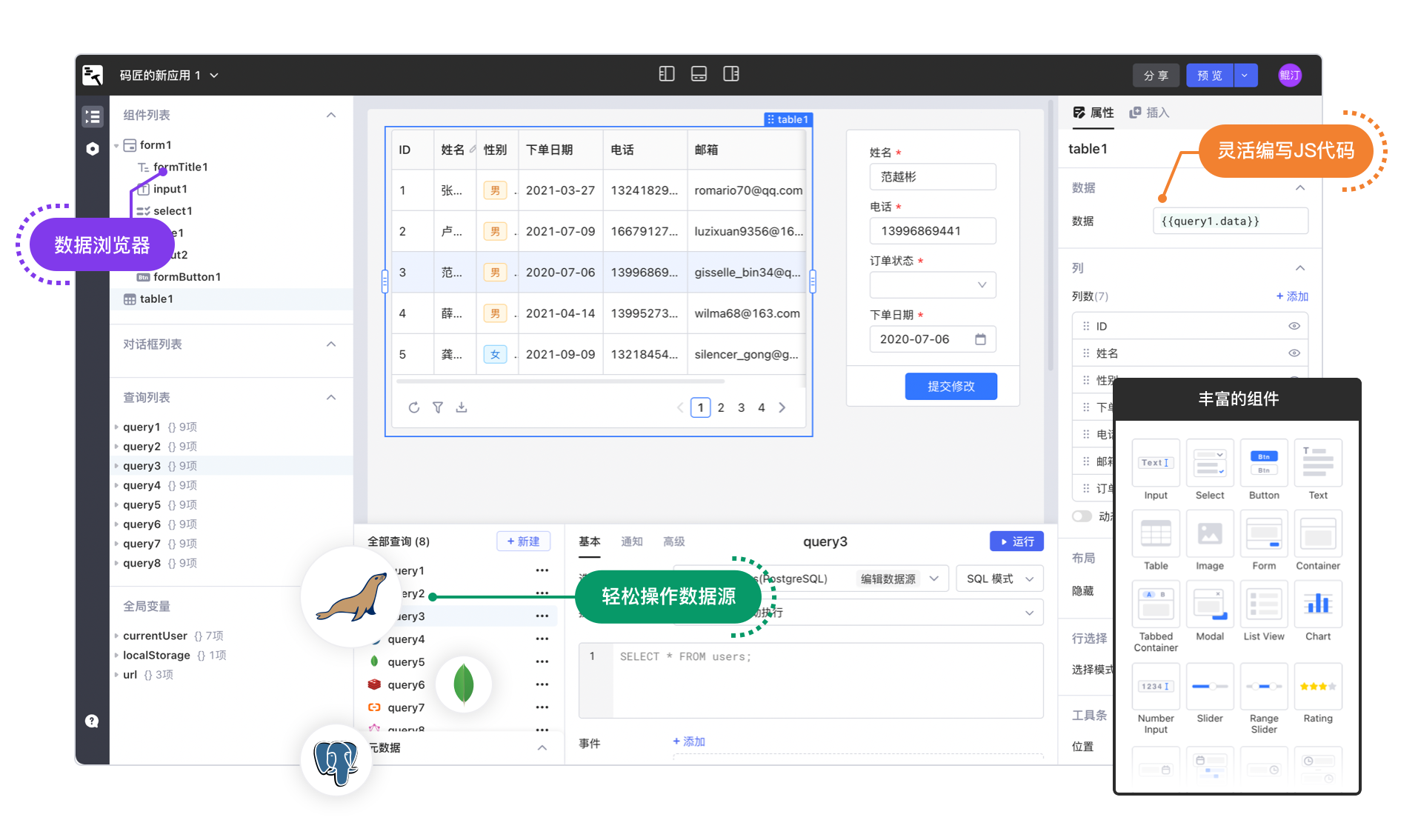
如何使用码匠连接 MariaDB
MariaDB 是一个免费的、开源的关系型数据库管理系统,由 MariaDB 的创始人 Michael Widenius 于 2010 年创建。它基于 MariaDB,但在对数据存储的处理中加入了一些自己的特性。MariaDB 相对于 MariaDB 而言,具有更好的性能和更好的兼容性&#…...
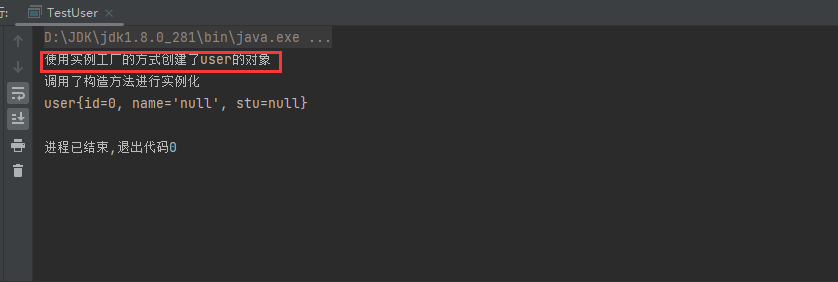
JavaEE简单示例——Bean的实例化
简单介绍: 在我们之前使用某个对象,那么就要创建这个类的对象,创建对象的过程就叫做实例化。对于Spring来说,实例化Bean的方式有三种,分别是构造方法实例化,静态方法实例化,实例工厂实例化。我…...

1229. 日期问题
目录 题目链接 一些话 流程 套路 ac代码 题目链接 1229. 日期问题 - AcWing题库 一些话 切入点 // 小明知道这些日期都在1960年1月1日至2059年12月31日。 // 这些日期采用的格式非常不统一,有采用年/月/日的,有采用月/日/年的,还有采用…...
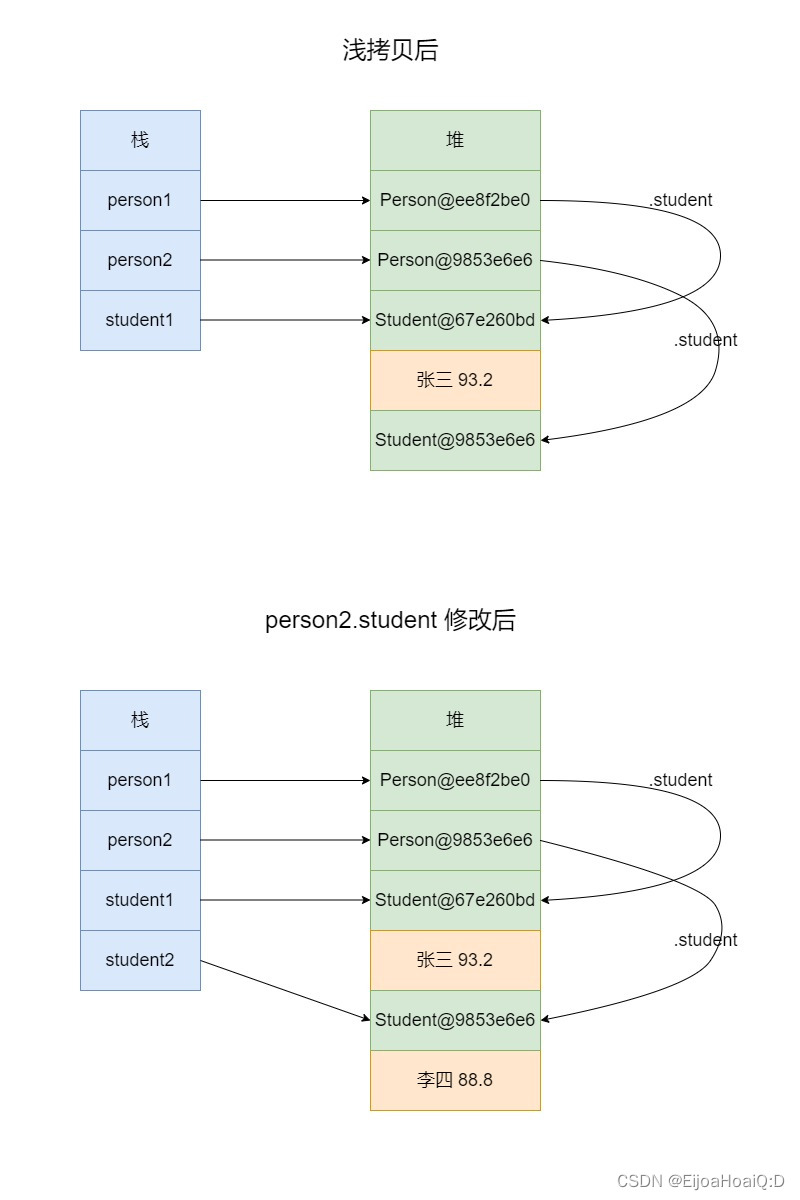
Java 中的浅拷贝和深拷贝
无论是浅拷贝还是深拷贝,都可以通过 Object 类的 clone() 方法来完成: /*** 拷贝** author qiaohaojie* date 2023/3/5 15:58*/ public class CloneTest {public static void main(String[] args) throws Exception {Person person1 new Person(23, &…...

【java】 java开发中 常遇到的各种难点 思路方案
文章目录逻辑删除如何建立唯一索引唯一索引失效问题加密字段模糊查询问题maven依赖冲突问题(jar包版本冲突问题)sql in条件查询时 将结果按照传入顺序排序作为一个开发人员 总会遇到各种难题 本文列举博主 遇见/想到 的例子 ,也希望同学们可以…...

ViewBinding 和 DataBinding的使用
1.ViewBinding:视图绑定 通过视图绑定功能,您可以更轻松地编写可与视图交互的代码。在模块中启用视图绑定之后,系统会为该模块中的每个 XML 布局文件生成一个绑定类。绑定类的实例包含对在相应布局中具有 ID 的所有视图的直接引用。在大多数情况下&…...

HTML+CSS入门
CSS概述 CSS指层叠样式表 (Cascading Style Sheets),用来定义HTML网页中的内容用什么样式来显示。 HTML: 指定网页显示的内容 CSS: 指定内容显示的样式CSS入门案例 <html><head><meta charset"UTF-8"><title>入门案例</tit…...

【Vue】vue2导出页面内容为pdf文件,自定义选中页面内容导出为pdf文件,打印选中页面内容,预览打印内容
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录前言一、安装html2canvas和jspdf二、导出pdf使用步骤1.在utils文件夹下创建htmlToPdf.js2.在main.js中引入3.在页面中使用三、打印预览1. 引入print-js2.页面中impor…...

保姆级使用PyTorch训练与评估自己的Replknet网络教程
文章目录前言0. 环境搭建&快速开始1. 数据集制作1.1 标签文件制作1.2 数据集划分1.3 数据集信息文件制作2. 修改参数文件3. 训练4. 评估5. 其他教程前言 项目地址:https://github.com/Fafa-DL/Awesome-Backbones 操作教程:https://www.bilibili.co…...
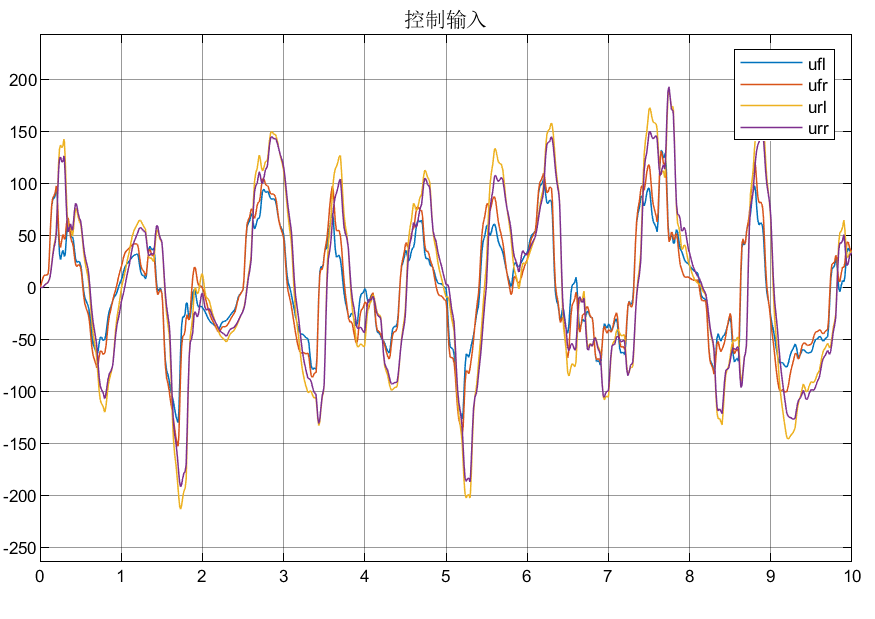
1/4车、1/2车、整车悬架PID控制仿真合集
目录 前言 1. 1/4悬架系统 1.1数学模型 1.2仿真分析 2. 1/2悬架系统 2.1数学模型 2.2仿真模型 2.3仿真分析 3. 整车悬架系统 3.1数学模型 3.2仿真分析 参考文献 前言 前面几篇文章介绍了LQR、SkyHook、H2/H∞控制,接下来会继续介绍滑模、反步法、MPC、…...

媒体邀约的形式和步骤
传媒如春雨,润物细无声,大家好,我是51媒体网胡老师。 做媒体服务很多年,今天就与大家分享下媒体邀约都有哪些形式: 1,电话邀约:通过电话与媒体记者进行沟通,邀请其参加活动或接受采…...
Unity合批处理
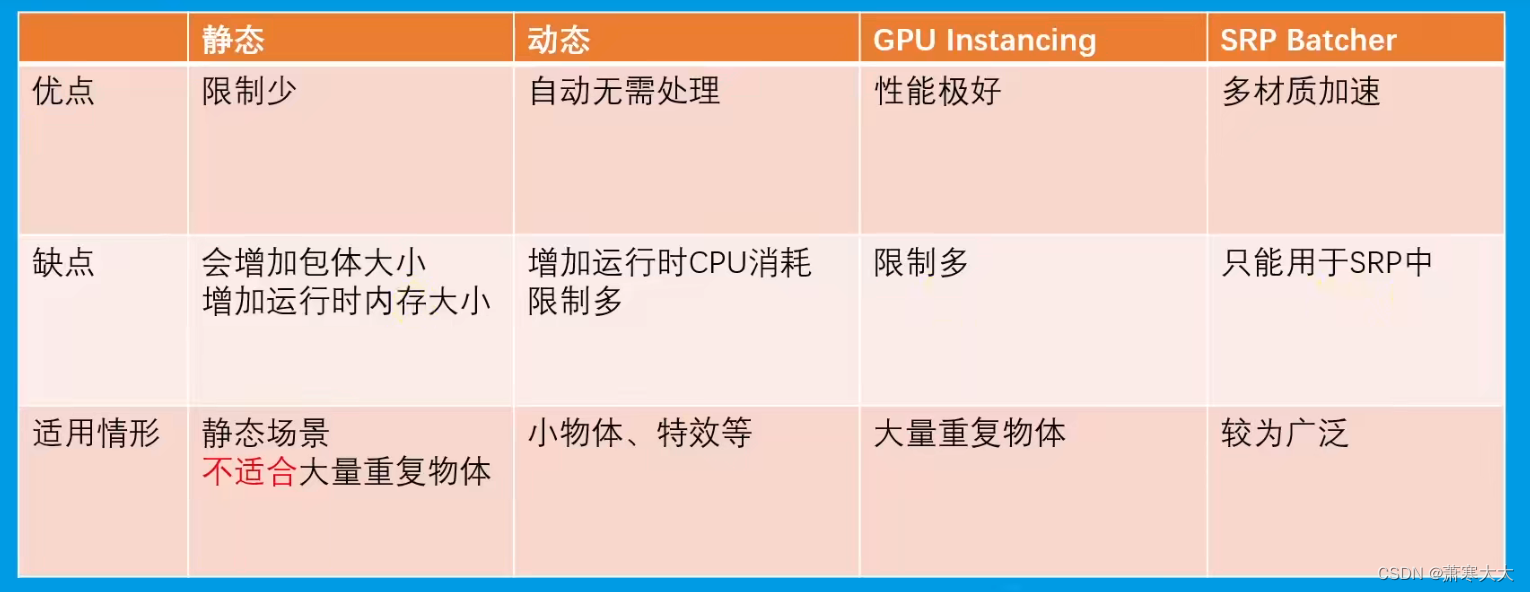
一.静态合批标记为Batching Static的物体(标记后物体运行不能移动、旋转、缩放)在使用相同材质球的条件下在项目打包的时候unity会自动将这些物体合并到一个大Mesh*缺点打包后体积增大运行时内存占用增大二.动态批处理不超过300个顶点不超过900个属性不包…...
Android 进阶——Binder IPC之Native 服务的启动及代理对象的获取详解(六)
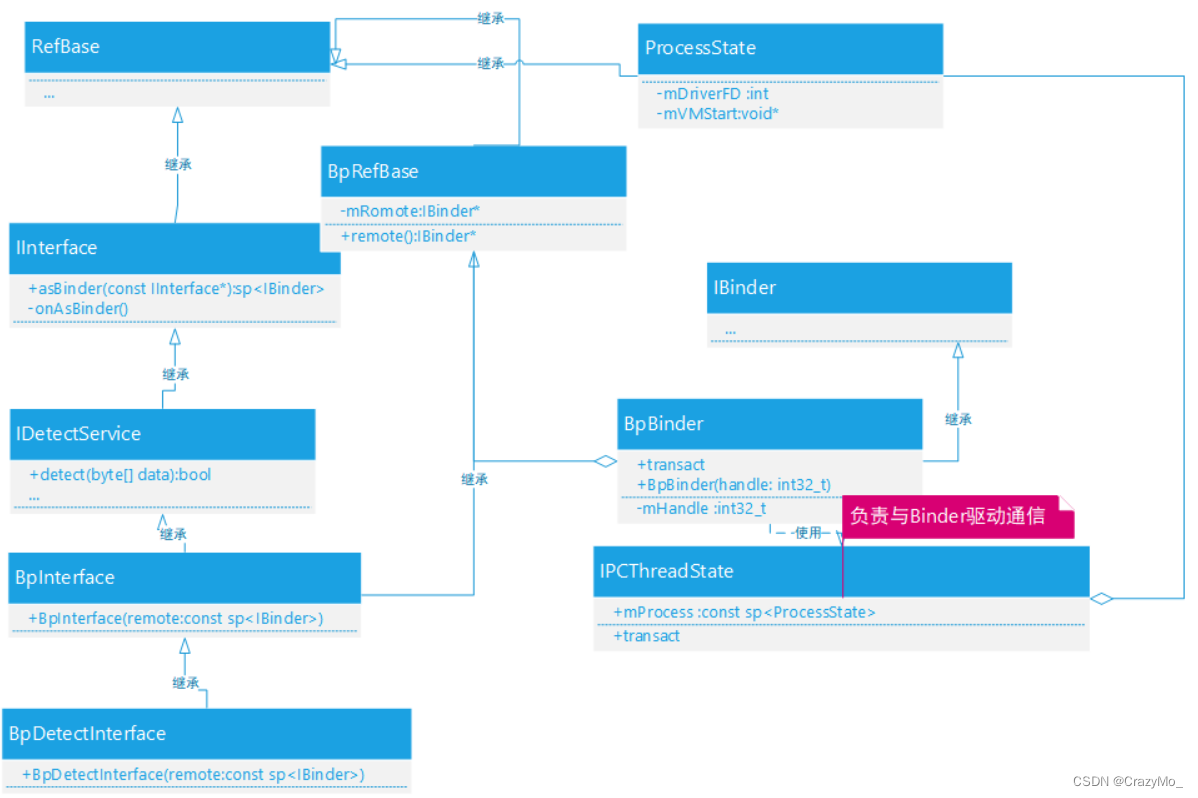
文章大纲引言一、Binder线程池的启动1、ProcessState#startThreadPool函数来启动线程池2、IPCThreadState#joinThreadPool 将当前线程进入到线程池中去等待和处理IPC请求二、Service 代理对象的获取1、获取Service Manager 代理对象BpServiceManager2、调用BpServiceManager#ge…...
企业官网怎么做?
企业官网是企业展示形象和吸引潜在客户的重要渠道之一,因此如何打造一款优秀的企业官网显得尤为重要。本文将从策划、设计、开发和上线等方面,为您介绍企业官网的制作步骤。 一、策划 1.明确目标 企业官网的制作需要明确目标,即确定官网的主…...
FPGA和IC设计怎么选?哪个发展更好?
很多人纠结FPGA和IC设计怎么选,其实往小了说,要看你选择的具体是哪个方向岗位。往大了说,将来你要是走更远,要成为大佬,那基本各个方向的都要有涉及的。 不同方向就有不同的发展,目前在薪资上IC设计要比FP…...

宁盾目录成功对接Coremail邮箱,为其提供LDAP统一认证和双因子认证
近日,宁盾与 Coremail 完成兼容适配,在 LDAP 目录用户同步、统一身份认证及双因子认证等模块成功对接。借此机会,双方将加深在产品、解决方案等多个领域的合作,携手共建信创合作生态,打造信创 LDAP 身份目录服务新样本…...

Python网络爬虫框架xcapy实战:任务驱动与反爬对抗
1. 项目概述:一个为现代应用量身定制的网络抓取框架最近在做一个需要大规模、高频率抓取网页数据的项目,传统的爬虫框架用起来总觉得有点“水土不服”。要么是异步处理不够优雅,遇到复杂的反爬策略就手忙脚乱;要么是配置过于繁琐&…...

基于CircuitPython与YouTube API的智能直播状态指示器制作指南
1. 项目概述与核心价值 如果你是一个内容创作者,或者你关注的某个频道正在直播,一个醒目、酷炫的“ON AIR”指示灯绝对能瞬间提升氛围感。今天要聊的这个项目,就是基于CircuitPython和YouTube API,自己动手打造一个能自动感知直播…...

QuickCut视频剪辑软件:3分钟快速上手免费视频处理神器
QuickCut视频剪辑软件:3分钟快速上手免费视频处理神器 【免费下载链接】QuickCut Your most handy video processing software 项目地址: https://gitcode.com/gh_mirrors/qu/QuickCut 还在为复杂的专业视频编辑软件头疼吗?QuickCut作为一款轻量级…...

构建本地化多链资产追踪器:从API聚合到数据可视化实践
1. 项目概述与核心价值最近在折腾一个挺有意思的小工具,起因是发现很多朋友在管理自己的数字资产时,尤其是那些基于区块链的Token,常常会陷入一种“信息孤岛”的状态。钱包地址散落在各处,不同链上的资产变动需要一个个去浏览器查…...

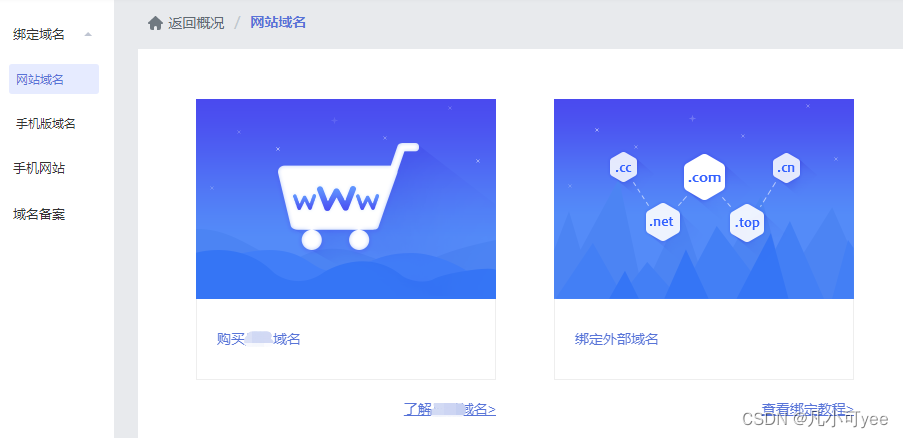
从Halo部署到公网访问:手把手教你用Nginx反代搞定域名、HTTPS与安全配置
从Halo部署到公网访问:Nginx反代全流程实战指南 当你成功在本地服务器上部署了Halo博客系统,看着8080端口的测试页面时,是否思考过如何让它成为真正的互联网站点?本文将带你跨越从本地测试到公网可访问的最后一道鸿沟,…...

机器人全身控制与SLAM系统核心技术解析
1. 机器人全身控制技术解析Sprout机器人采用的全身控制策略(Whole-Body Policy)通过分层控制架构实现了稳定运动与精准操作的平衡。该系统将控制分为三个主要层级:骨盆姿态控制、上肢柔顺控制和高度调节。这种分层设计使得机器人能够在保持上…...

如何使用witr快速定位占用端口的神秘进程?完整指南
如何使用witr快速定位占用端口的神秘进程?完整指南 【免费下载链接】witr Why is this running? 项目地址: https://gitcode.com/GitHub_Trending/wi/witr 你是否曾经遇到过端口被占用却不知道是哪个进程在捣乱的情况?😫 想要启动Web…...

从碎片到体系:如何用Obsidian Weread插件打造你的个人读书知识库
从碎片到体系:如何用Obsidian Weread插件打造你的个人读书知识库 【免费下载链接】obsidian-weread-plugin Obsidian Weread Plugin is a plugin to sync Weread(微信读书) hightlights and annotations into your Obsidian Vault. 项目地址: https://gitcode.com…...

NotebookLM文献精读陷阱警示:化学人必避的5类幻觉引用、2种结构误识别及实时校验方案
更多请点击: https://kaifayun.com 第一章:NotebookLM文献精读陷阱警示:化学人必避的5类幻觉引用、2种结构误识别及实时校验方案 NotebookLM 作为基于语义理解的AI文献助手,在化学领域高频出现“看似合理、实则失真”的推理错误。…...
)
保姆级避坑指南:在Ubuntu 18.04上从零搭建PX4仿真环境(ROS Melodic + Gazebo 9)
从零避坑:Ubuntu 18.04下PX4仿真环境全链路搭建实战 当无人机开发者第一次接触PX4生态时,往往会被复杂的工具链和隐蔽的环境依赖所困扰。本文将以"问题驱动"的方式,拆解ROS Melodic Gazebo 9 PX4组合环境搭建中的12个典型陷阱&am…...