python实现无人机航拍图片像素坐标转世界坐标
背景
已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正
脚本
import numpy as np
import cv2# 畸变校正
def undistort_pixel(pixel_x, pixel_y, sym_dist, dec_dist):k0,k1,k2,k3=sym_dist# k1, k2, p1, p2, k3 = sym_distp1,p2,p3=dec_distfx = focal_length_mmfy = focal_length_mmcx = xpoff_pxcy = ypoff_pxdistCoeffs = np.array([k1, k2, p1, p2,k3])cameraMatrix = np.array([[fx, 0, cx], [0, fy, cy], [0, 0, 1]])distorted_points = np.array([[pixel_x, pixel_y]], dtype=np.float32)undistorted_points = cv2.undistortPoints(distorted_points, cameraMatrix, distCoeffs)#################################################### 4\对图像去畸变img = cv2.imread('./images/100_0004_0001.JPG')img_undistored = cv2.undistort(img, cameraMatrix, distCoeffs)cv2.imwrite('./images/100_0004_00011.JPG', img_undistored)return undistorted_points[0][0][0], undistorted_points[0][0][1]# 相机坐标转世界坐标
def camera_to_world_coordinates(cam_coords, pos):# 获取相机到世界的转换参数pos_x, pos_y, pos_z, roll, pitch, yaw = pos# 将角度转换为弧度roll = np.radians(roll)pitch = np.radians(pitch)yaw = np.radians(yaw)# 计算旋转矩阵R_roll = np.array([[1, 0, 0],[0, np.cos(roll), -np.sin(roll)],[0, np.sin(roll), np.cos(roll)]])R_pitch = np.array([[np.cos(pitch), 0, np.sin(pitch)],[0, 1, 0],[-np.sin(pitch), 0, np.cos(pitch)]])R_yaw = np.array([[np.cos(yaw), -np.sin(yaw), 0],[np.sin(yaw), np.cos(yaw), 0],[0, 0, 1]])R = R_yaw @ R_pitch @ R_roll# 相机坐标转换到世界坐标cam_coords_homogeneous = np.array([cam_coords[0], cam_coords[1], -H, 1])world_coords = R @ cam_coords_homogeneous[:3] + np.array([pos_x, pos_y, pos_z])return world_coordsif __name__ == "__main__":####################################################基本参数# 传感器宽度和高度(毫米)sensor_width_mm = 12.83331744000000007588sensor_height_mm = 8.55554496000000064271# 图像宽度和高度(像素)image_width_px = 5472image_height_px = 3648# 焦距(毫米)focal_length_mm = 8.69244671863242679422# 焦距(米)focal_length_m = 8.69244671863242679422/1000# 相对航高(米)H=86.93#像主点坐标 (像素)xpoff_px=20.88973563438230485190ypoff_px=50.51977022866981315019#################################################### 1\计算空间分辨率# 传感器尺寸转换为米sensor_width_m = sensor_width_mm / 1000sensor_height_m = sensor_height_mm / 1000# 计算水平和垂直的 GSDGSD_x = (sensor_width_m/image_width_px) * (H / focal_length_m )GSD_y = (sensor_height_m /image_height_px) * (H / focal_length_m)# 水平和垂直方向的 GSDprint("水平方向的 GSD:", GSD_x, "米/像素")print("垂直方向的 GSD:", GSD_y, "米/像素")#################################################### 2\给定像素坐标,计算相机坐标# 像素坐标oripixel_x = image_width_pxoripixel_y = image_height_px# oripixel_x = image_width_px/2# oripixel_y = image_height_px/2# oripixel_x = 0# oripixel_y = 0pixel_x=oripixel_x-xpoff_px-image_width_px/2pixel_y=oripixel_y-ypoff_px-image_height_px/2# 计算相机坐标(假设无畸变)camera_x = pixel_x * GSD_xcamera_y = pixel_y * GSD_yprint("像素坐标 (", oripixel_x, ",", oripixel_y, ") 对应的相机坐标 (x, y): (", camera_x, "米, ", camera_y, "米)")#################################################### 3\计算畸变后坐标# 对称畸变系数sym_dist = [0, -0.00043396118129128110, 0.00000262222711982075, -0.00000001047488706013]# 径向畸变dec_dist = [0.00000205885592671873, -0.00000321714140091248, 0]# 进行畸变校正undistorted_camera_x, undistorted_camera_y = undistort_pixel(pixel_x, pixel_y, sym_dist, dec_dist)print("畸变校正后像素坐标 (", oripixel_x, ",", oripixel_y, ") 对应的相机坐标 (x, y): (", undistorted_camera_x, "米, ", undistorted_camera_y, "米)")#################################################### 4\计算世界坐标# POS数据pos = [433452.054688, 2881728.519704, 183.789696, 0.648220, -0.226028, 14.490357]# 计算世界坐标world_coords = camera_to_world_coordinates((undistorted_camera_x, undistorted_camera_y), pos)print("旋转平移变换后像素坐标 (", oripixel_x, ",", oripixel_y, ") 对应的世界坐标 (x, y): (", world_coords[0], "米, ", world_coords[1], "米)")相关文章:

python实现无人机航拍图片像素坐标转世界坐标
背景 已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正 脚本 impor…...

C#面:什么是 Windows 服务,它的生命周期与标准的 EXE 程序有什么不同
C#中的Windows服务是一种在后台运行的长时间运行的应用程序,它可以在Windows操作系统启动时自动启动,并在系统运行期间持续运行。与标准的EXE程序相比,Windows服务具有以下不同之处: 生命周期:Windows服务的生命周期与…...
Java基础面试题自测
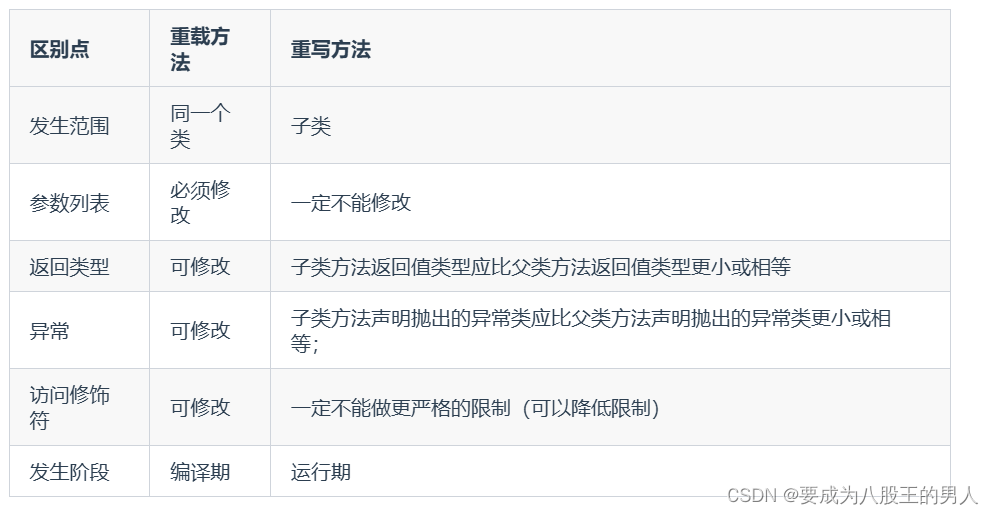
文章目录 一、Java 中有哪 8 种基本数据类型?说说这 8 种基本数据类型对应的包装类型?二、包装类型的常量池技术了解么?三、为什么要有包装类型?四、什么是自动拆装箱?原理?四、遇到过自动拆箱引发的 NPE 问…...

【LeetCode 第 401 场周赛】K秒后第 N 个元素的值
文章目录 1. K秒后第 N 个元素的值🆗 1. K秒后第 N 个元素的值🆗 题目链接🔗 🐧解题思路: 前缀和 小规律🍎 🍎 从上图观察可知,规律一目了然,arr[i] arr[i] 对上一…...

游戏心理学Day10
习得性动机。 习得性动机也称社会性动机是指人与社会生活相联系的后天习得的动机,这类动机比原发性动机要多很多。 成就动机。 成就动机是指个人追求进步以及达到目标的内在动力。 在游戏中设计师总会担心过多的失败,会令玩家感到挫败进而离开游戏 对…...

MySQL表设计经验汇总篇
文章目录 1、命名规范2、选择合适的字段类型3、主键设计要合理4、选择合适的字段长度5、优先考虑逻辑删除,而不是物理删除6、每个表都需要添加通用字段7、一张表的字段不宜过多8、定义字段尽可能not null9、合理添加索引10、通过业务字段冗余来减少表关联11、避免使…...

Servlet基础(续集2)
HttpServletResponse web服务器接收到客户端的http的请求,针对这个请求,分别创建一个代表请求的HttpServletRequest对象,代表响应的一个HttpServletResponse 如果要获取客户端请求过来的参数:找HttpServletRequest如果要给客户端…...

【云原生】创建harbor私有仓库及使用aliyun个人仓库
1.安装docker #删除已有dockersystemctl stop docker yum remove docker \docker-client \docker-client-latest \docker-common \docker-latest \docker-latest-logrotate \docker-logrotate \docker-engine #安装docker yum install -y docker-ce-20.10.1…...
什么是SOLIDWORKS科研版
随着科技的不断进步,工程设计和科学研究变得越来越复杂,需要更强大的工具来满足需求。SOLIDWORKS科研版就是在这样的背景下诞生的,它为科研人员和工程师提供了一套全方面、快捷的解决方案,以应对各种科研和工程挑战。 SOLIDWORKS科…...

微信小程序页面配置
页面配置 小程序的配置可以配置页面路径、窗口表现、tabBar等,分为全局配置和页面配置,全局配置针对所有页面生效,页面配置只针对当前页生效。 全局配置 (app.json) (1) 路径配置 pages 配置页面路径,未配置路径的页面无法被访…...

如何将JPG/PNG位图免费快速一键转换成SVG格式的矢量图
环境: JPG/PNG位图 问题描述: 如何将JPG/PNG位图快速一键转换成SVG格式的矢量图 解决方案: 是一个人工智能驱动的图片转换工具,可以帮助用户将」JPG/PNG位图快速转换成SVG格式的矢量图,方便设计人员对图片进行二次…...
YOLO检测环境安装配置
YOLO介绍 YOLO学习手册:YOLO教程 YOLO [ˈjoʊloʊ](You Only Look Once)是一种快速而准确的目标检测算法,由Joseph Redmon等人在2016年提出。YOLO被广泛应用于计算机视觉领域,包括实时视频分析、自动驾驶、安防监控、…...
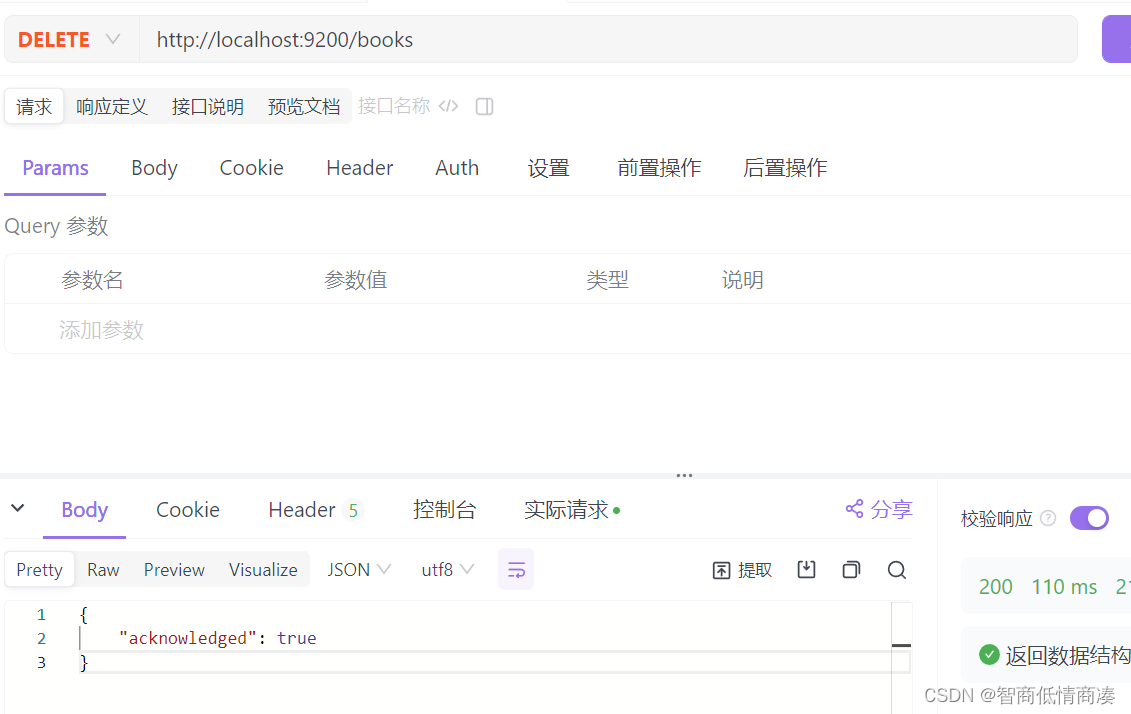
NOSQL -- ES
第三个我们比较常用的NOSQL类型的数据库 --- ES 介绍: ES的全称(Elasticsearch) ES是一个分布式全文搜索的引擎 也就是我们平常在购物, 搜索东西的时候常用的, 就是一个ES的类型, 分布式全文搜索引擎 查询原理: 1>分词: 在查询之前, 其会将一些数据拆分开, 按照词进行拆分…...
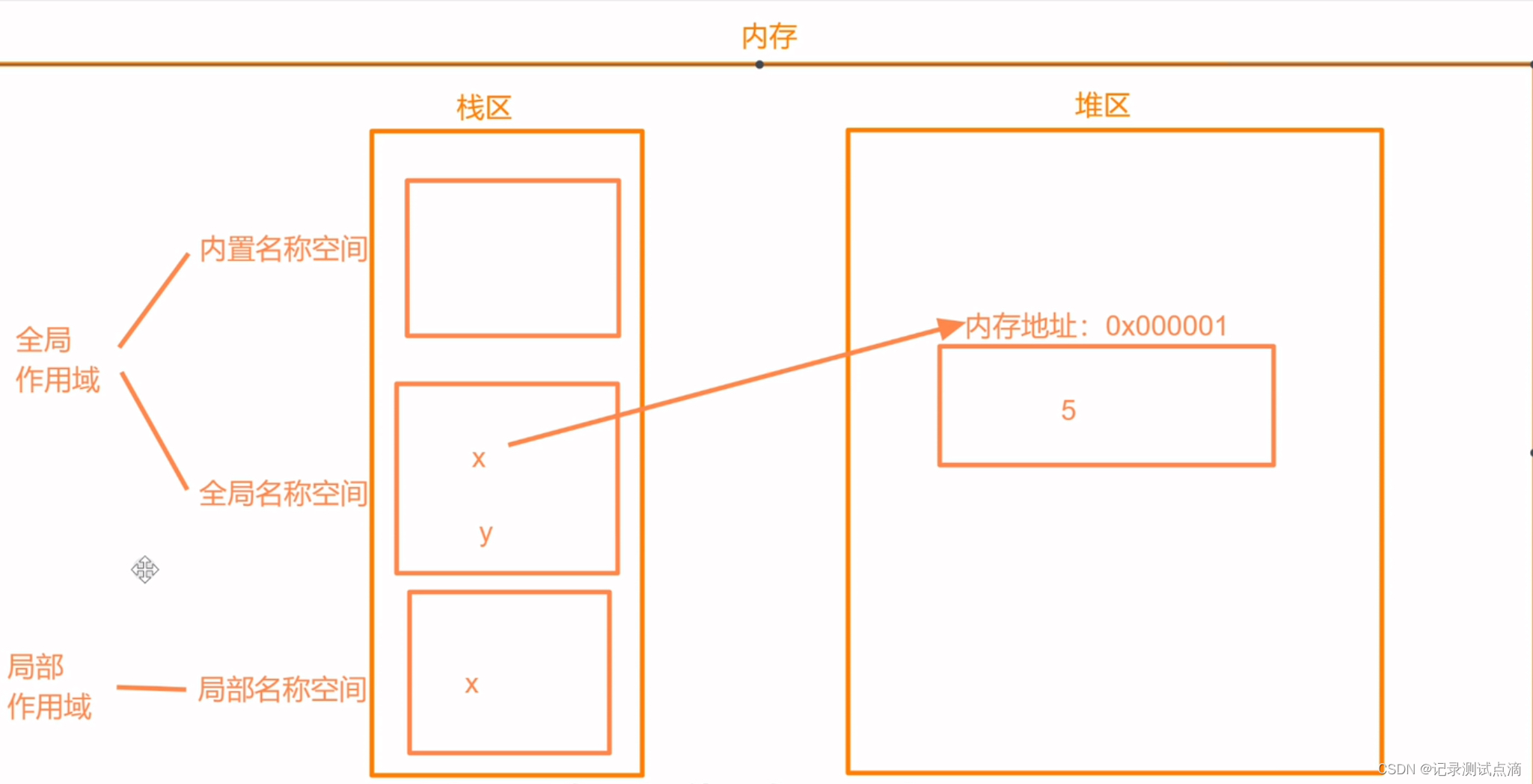
【Python基础】名称空间和作用域
1.名称空间 将栈区进行分类,这些分类就是名称空间 名称空间存放什么名字空间个数何时创建&销毁内置名称空间built-inPython解释器内置的名字1个Python解释器启动&解释器关闭 全局名称空间 global Python文件内定义的类名,变量名,模块…...

安全智能预警软件有人试图窃取会立即发出高分贝警报已解锁VIP功能
一款手机安全智能预警软件,无论是网吧还是餐馆小聚,您的手机都能得到贴心的守护,一旦有人试图窃取,应用会立即发出高分贝警报,确保您在公交、地铁、商场等拥挤环境中依然能牢牢掌控手机。(解锁专业版&#…...

DeepSORT(目标跟踪算法)中自由度决定卡方分布的形状
DeepSORT(目标跟踪算法)中自由度决定卡方分布的形状 flyfish 重要的两个点 自由度决定卡方分布的形状(本文) 马氏距离的平方在多维正态分布下服从自由度为 k 的卡方分布 独立的信息 在统计学中,独立的信息是指数据…...
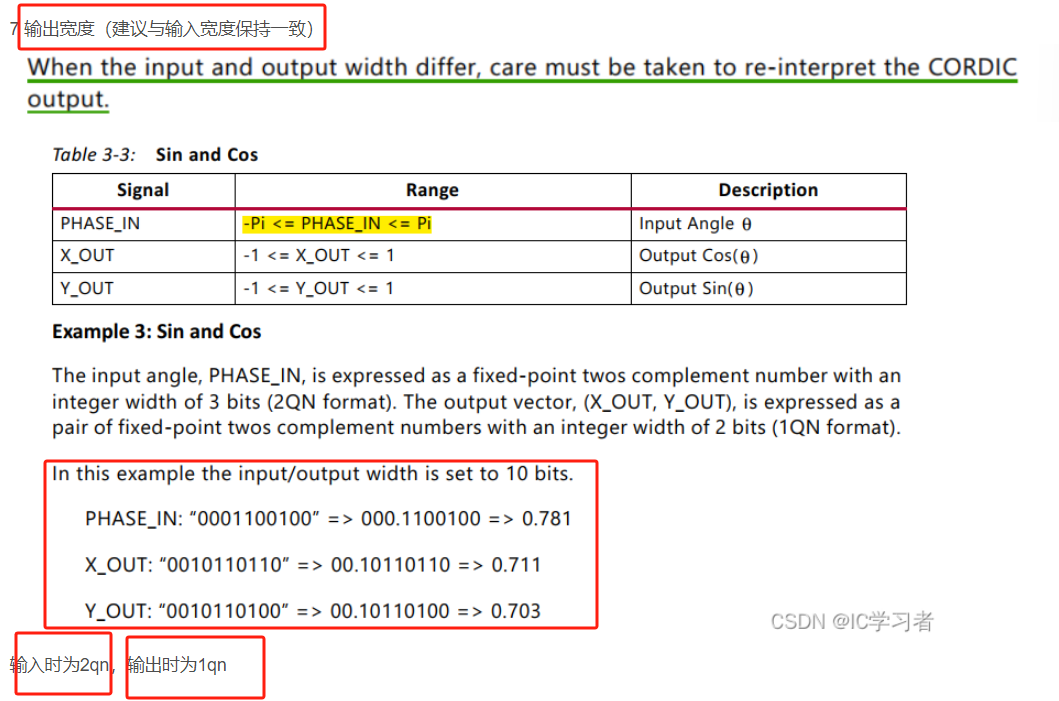
cordic IP核中,sin and cos的使用
参考视频:FPGA IP之CORDIC_哔哩哔哩_bilibili FPGA IP之CORDIC使用与仿真_哔哩哔哩_bilibili 一、参数说明 functional selection rotate是旋转,sin and cos是计算这两个三角函数,sinh和cosh是计算双曲正弦和双曲余弦 phase format 对于…...
SpringSecurity入门(三)
12、密码加密 12.1、不指定具体加密方式,通过DelegatingPasswordEncoder,根据前缀自动选择 PasswordEncoder passwordEncoder PasswordEncoderFactories.createDelegatingPasswordEncoder();12.2、指定具体加密方式 // Create an encoder with streng…...
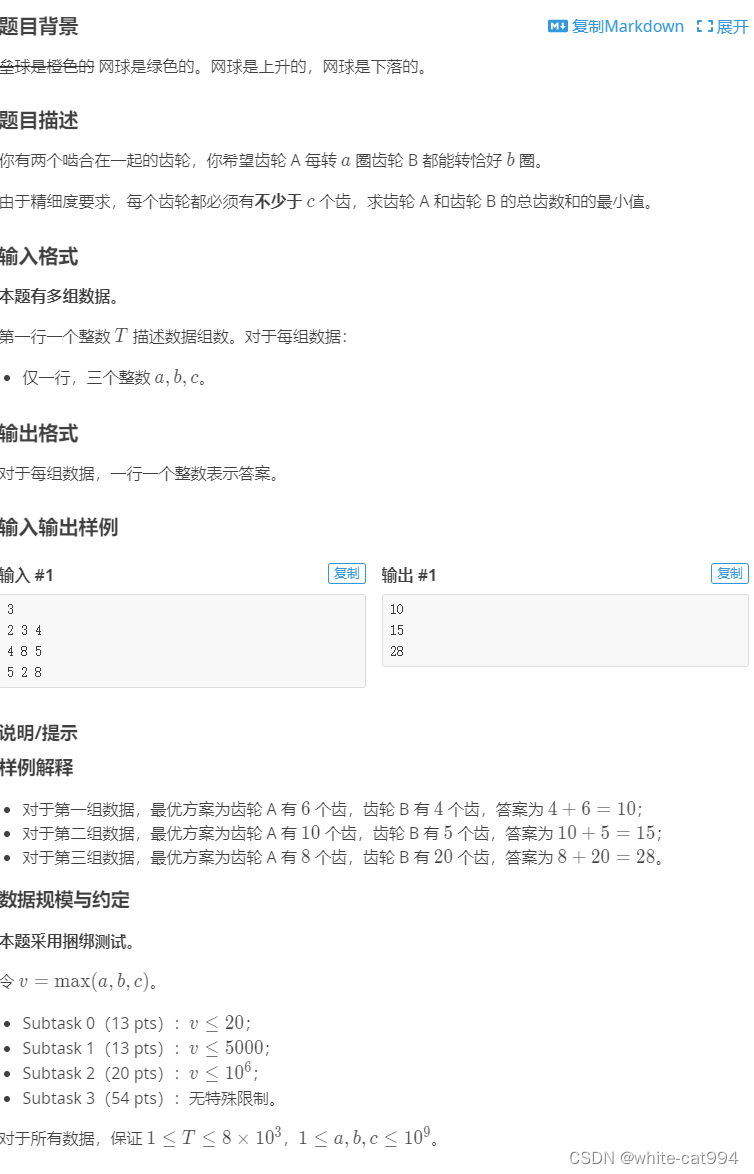
luogu-P10570 [JRKSJ R8] 网球
题目传送门: [JRKSJ R8] 网球 - 洛谷https://www.luogu.com.cn/problem/P10570 解题思路 数学问题,暴力这个范围会超时。 首先,找出这两个数的最大公因数,将这两个数分别除以最大公因数,则这两个数互质,判…...

ASP.NET的WebService跨域CORS问题解决方案
ASP.NET WebService 跨域(CORS, Cross-Origin Resource Sharing)问题通常发生在当您尝试从不同的源(域名、协议或端口)调用 WebService 时。浏览器由于安全原因,默认会阻止此类跨域请求。为了解决这个问题,您需要在 WebService 服务器端配置 CORS。 以下是在 ASP.NET We…...

企业内统一AI开发环境借助TaotokenCLI工具一键配置
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内统一AI开发环境借助Taotoken CLI工具一键配置 在中大型企业的技术团队中,为所有开发者提供统一、标准化的AI服务…...

智慧医疗颈椎椎骨识别分割数据集labelme格式1054张6类别
数据集格式:labelme格式(不包含mask文件,仅仅包含jpg图片和对应的json文件)图片数量(jpg文件个数):1054标注数量(json文件个数):1054标注类别数:6标注类别名称:["C2","C3","C4","C…...

观察Taotoken在多模型间自动路由与容灾切换的实际响应情况
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察Taotoken在多模型间自动路由与容灾切换的实际响应情况 在构建依赖大模型服务的应用时,服务的连续性与稳定性是开发…...

N_m3u8DL-RE深度解析:现代流媒体下载引擎的架构设计与实战应用
N_m3u8DL-RE深度解析:现代流媒体下载引擎的架构设计与实战应用 【免费下载链接】N_m3u8DL-RE Cross-Platform, modern and powerful stream downloader for MPD/M3U8/ISM. English/简体中文/繁體中文. 项目地址: https://gitcode.com/GitHub_Trending/nm3/N_m3u8…...

AI换脸终极指南:5分钟掌握roop-unleashed完整教程
AI换脸终极指南:5分钟掌握roop-unleashed完整教程 【免费下载链接】roop-unleashed Evolved Fork of roop with Web Server and lots of additions 项目地址: https://gitcode.com/gh_mirrors/ro/roop-unleashed 想要零基础制作电影级AI换脸视频?…...

LSLib终极指南:轻松解锁《神界原罪》和《博德之门3》MOD制作之门
LSLib终极指南:轻松解锁《神界原罪》和《博德之门3》MOD制作之门 【免费下载链接】lslib Tools for manipulating Divinity Original Sin and Baldurs Gate 3 files 项目地址: https://gitcode.com/gh_mirrors/ls/lslib LSLib是一款专门为《神界原罪》系列和…...

Node.js 服务如何无缝接入 Taotoken 并管理多个模型的 API 调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Node.js 服务如何无缝接入 Taotoken 并管理多个模型的 API 调用 在构建现代 Node.js 后端服务时,集成多种大语言模型能…...

高斯混合期望传播算法:破解MIMO检测中离散先验近似难题
1. 项目概述:当MIMO检测遇上贝叶斯机器学习在无线通信领域,多输入多输出(MIMO)技术早已不是什么新鲜词。它通过在收发两端部署多根天线,让数据在空间维度上并行传输,从而在不增加带宽和发射功率的前提下&am…...

Hotkey Detective:3分钟快速定位Windows热键冲突的完整指南
Hotkey Detective:3分钟快速定位Windows热键冲突的完整指南 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是…...

终极指南:如何用novel-downloader轻松保存网络小说到本地
终极指南:如何用novel-downloader轻松保存网络小说到本地 【免费下载链接】novel-downloader 一个可扩展的通用型小说下载器。 项目地址: https://gitcode.com/gh_mirrors/no/novel-downloader 你是否曾经遇到过心爱的小说突然从网站上消失的窘境?…...