【智能制造-2】焊缝跟踪
焊缝跟踪?
焊缝跟踪:指在焊接位置前方安装光学传感器进行数据采集,然后传输到焊接机器人,进行自适应的各种模糊控制算法校正焊接机器人或专机的轨迹,实现自适应控制,达到实时的焊缝跟踪。
焊缝跟踪的方法?
在工业焊接中,实现焊缝跟踪和实时纠偏是为了确保焊缝的质量和一致性,常用的方法包括视觉跟踪、激光传感器、电弧传感器等技术。这些系统通过检测焊缝和焊接路径偏差,实时调整焊接设备的位置和焊接参数,以下是一些主要的方法:
- 视觉跟踪系统(Vision Tracking System):
相机:视觉跟踪系统通常使用工业相机来捕捉焊缝的实时图像。
图像处理:通过图像处理技术,如边缘检测、模板匹配等算法来识别焊缝的位置和形状。
反馈控制:根据识别到的焊缝位置,系统生成控制信号,实时调整焊接机器人或其他焊接设备的运动,以保持焊缝的准确性。 - 激光传感器(Laser Sensors):
激光轮廓扫描:利用激光传感器对焊缝区域进行轮廓扫描,获取焊缝的三维数据。
数据处理:通过数据处理和分析,确定焊缝的位置和偏差。
控制调整:系统基于分析结果调整焊接设备的位置和焊接参数,实现实时纠偏。 - 电弧传感器(Arc Sensors):
电弧信号反馈:利用焊炬与焊缝之间的电弧信号差异来检测焊接过程中的偏差。
信号处理:实时处理电弧传感器提供的信号,确定焊缝的实际位置。
自动调整:根据检测结果调整焊接设备的运动路径和焊接参数。 - 多传感器融合(Multi-Sensor Fusion):
综合应用:结合视觉、激光、电弧等多种传感器的检测结果,实现更加准确和可靠的焊接跟踪和纠偏。
数据融合:通过数据融合算法,将不同传感器的信息综合起来,优化焊接路径和参数。 - 人工智能与机器学习(AI & ML):
模式识别:利用机器学习算法识别焊缝形状和位置的模式。
自学习:通过深度学习算法,系统可以自我学习和优化焊接参数,提高焊接精度和效率。
智能控制:结合AI,系统可以在复杂工况下自动调整焊接策略,实现智能化焊接。
这些技术的结合和应用,通过实时检测和反馈控制,实现了焊缝跟踪的实时纠偏,保证了焊接质量的稳定性和一致性。
焊缝跟踪是如何做到实时纠偏的?
在焊缝跟踪与实时纠偏的具体控制算法上,通常使用闭环控制系统(反馈控制系统),其核心在于利用传感器数据进行实时监控和调整。以下是一些常用的控制算法和方法:
- 比例-积分-微分控制(PID Control)
PID控制器是最常用的反馈控制算法之一,能够提供连续的控制信号。
比例控制(P):直接与当前误差成比例,提供基础的纠偏能力。
积分控制(I):考虑累积误差,使得系统能消除长期的稳态误差。
微分控制(D):根据误差变化速率进行调整,提高系统的动态响应速度和稳定性。
实际应用:
PID控制算法可以直接应用于焊接机器人,以调整焊炬的位置和焊接参数。例如:
视觉系统检测到焊缝偏移。
计算误差值(目标位置与实际位置的差值)。
PID控制器根据误差值生成控制信号,调整焊炬的路径。 - 模糊控制(Fuzzy Control)
模糊控制利用模糊逻辑处理不确定性和模糊性,适用于复杂和不精确的控制对象。
实际应用:
启动时,模糊控制可以提供初始调整参数。
根据传感器数据生成模糊规则,通过模糊推理实现对焊炬位置和焊接参数的实时调整。 - 自适应控制(Adaptive Control)
自适应控制系统可以根据实时数据动态调整控制参数,以适应环境变化和系统动态特性。
实际应用:
实时更新焊接系统的模型参数,根据焊接过程中焊缝的变化调整控制策略。
自适应控制算法广泛应用于焊接速度、焊接电流、电压的实时调整,确保焊接质量。 - 模型预测控制(Model Predictive Control, MPC)
MPC使用系统的预测模型和实际数据进行实时优化,生成下一步的控制信号。
实际应用:
建立焊接过程的数学模型。
基于实时传感器数据进行预测和优化,生成焊炬的运动路径和焊接参数的控制信号。
调整焊接参数以最小化未来的误差。 - 机器学习与人工智能算法
利用机器学习和人工智能算法可以实现更高层次的自动化和智能化控制。
实际应用:
训练神经网络或其他机器学习模型,根据历史数据和实时数据生成最优控制策略。
深度学习算法用于焊缝位置和形态的实时识别与预测,动态调整焊接路径和参数。
总结
在实际的焊缝跟踪和实时纠偏系统中,通常会综合应用上述多种控制算法,以获得最佳的控制效果。系统首先利用传感器(如视觉、激光、电弧信号)实时检测焊缝和焊接路径的偏差,通过信号处理和误差计算确定当前的偏差值,然后由控制算法生成控制信号,最终通过控制器实现对焊炬位置、焊接电流、电压等参数的实时调整,以纠正焊缝偏差,确保焊接质量的稳定性和一致性。
自适应控制算法?
自适应控制(Adaptive Control)是一种能够在不确定或变化环境中动态调整其控制参数的控制算法。对于焊缝跟踪和实时纠偏,自适应控制算法尤为有效,因为它可以实时适应焊接工艺过程中的各种变化,提高焊接质量和稳定性。
自适应控制基本原理
自适应控制系统主要包括两个部分:
(1)参数估计:实时估计系统的参数。
(2)控制律调整:根据参数估计结果实时调整控制策略。
自适应控制的几种主要方法:
- 模型参考自适应控制(Model Reference Adaptive Control, MRAC)
在MRAC中,设定一个参考模型,其表现代表系统所期望的动态特性。实际系统的输出应跟随参考模型的输出。
参考模型:定义期望动态行为。
误差计算:实际系统输出与参考模型输出之间的误差。
参数调整:调整控制参数,使误差最小化,实际输出趋近于参考模型输出。
应用示例:
在焊接过程中,定义一个理想焊缝模型。
实时监控焊缝的实际位置和形态。
通过自适应调整焊接参数,如焊接速度、电流、电压等,使实际焊缝尽可能符合理想模型。 - 现场自适应控制(Self-Tuning Regulator, STR)
STR方法使用参数估计器和调节器两个部分:
参数估计:利用实时数据和在线算法估计系统模型参数。
控制调节:基于估计的参数调节控制器,使系统跟踪期望的行为。
应用示例:
实时收集焊接过程中的数据,如焊缝偏差、焊接速度、电流等。
在线估计焊接过程的动态行为模型。
根据估计模型,实时调整控制器参数,例如PID控制器的增益等,达到最佳控制效果。 - 增量自适应控制(Gain Scheduling Adaptive Control)
在此方法中,控制系统根据操作点或环境条件的变化,选择不同的控制律。适用于具有明显工况变化的系统。
应用示例:
针对不同材质或不同厚度的焊接工件,预先设定多组控制参数。
根据实时传感器数据,判断当前工况,切换到对应的控制参数集合,实现精准控制。
具体实施步骤
以下是实施自适应控制算法的一般步骤:
系统建模
建立焊接过程的数学模型,描述系统的动态行为。
参数估计
选择合适的参数估计算法(如最小二乘估计、卡尔曼滤波等),在焊接过程中实时估计系统参数。
控制律设计
基于估计的参数,设计控制律。可以是PID控制器、自适应LQR(线性二次调节器)等。
实施自适应控制
在实时焊接过程中,利用估计参数不断调整控制器。
调整焊接设备的运动路径和焊接参数(如电流、电压)。
性能评价
实时监控焊接质量,评价自适应控制的性能。
根据评价结果,调整和优化自适应控制算法。
实例:焊接机器人自适应控制
假设我们有一个焊接机器人,目标是焊接时刻保持焊缝的精确位置。具体实施如下:
传感器数据采集:
使用视觉传感器、激光传感器,实时采集焊缝的位置信息。
参数估计:
在线使用最小二乘算法估计系统的动态模型参数。
自适应控制器设计:
设计一个PID控制器,其增益参数由自适应算法根据实时估计的系统模型参数不断调整。
实时调整控制:
根据误差(实际焊缝位置与目标位置的偏差),通过自适应PID控制器实时调整焊炬位置和焊接参数。
监控与反馈:
实时监控焊接质量,通过反馈机制不断优化自适应控制策略。
结论
自适应控制技术通过实时参数估计和控制策略优化,实现了对焊接过程的精确控制,能够适应各种工况变化,确保焊接质量的稳定性和一致性。在复杂和变化多端的焊接环境中,自适应控制算法是实现实时纠偏的有效方法。
相关文章:

【智能制造-2】焊缝跟踪
焊缝跟踪? 焊缝跟踪:指在焊接位置前方安装光学传感器进行数据采集,然后传输到焊接机器人,进行自适应的各种模糊控制算法校正焊接机器人或专机的轨迹,实现自适应控制,达到实时的焊缝跟踪。 焊缝跟踪的方法…...

优思学院|用ChatGPT快速完成数据分析图表【柏累托图法】
数据分析是很多行业的人不可少的一部分,尤其是质量工程师更是日常的工作。然而,随着科技的进步,人工智能(AI)将逐渐承担起数据计算的工作,这意味着未来的质量工程师需要具备的不仅仅是计算能力,…...

[晕事]今天做了件晕事37 extern “C“ 被认为了是外部函数
最近看到一个函数声明是 extern “C" void _dump(); 这里的声明是要告诉编译器,这个_dump是C语言的符号,没有经过mangle过的。但是这个关键字可能让人混淆是外部函数。因为这个关键字可以声明外部函数。这也算是一词多用的一个普遍问题。关键的关键…...
问题:关于醋酸钠的结构,下列说法错误的是() #媒体#媒体
问题:关于醋酸钠的结构,下列说法错误的是() A.有极性键 B.有非极性键 C.是极性分子 D.是离子晶体 参考答案如图所示...
)
网络安全(补充)
同步包风暴(SYN Flood)攻击者假造源网址发送多个同步数据包(SYN Packet)给服务器,服务器因无法收到确认数据包(ACK Packet),使TCP/IP协议三次握手无法顺利完成,因而无法建…...
)
Redis集群(3)
集群扩容 节点配置和启动 我们要加入两个节点,主节点端口为6903,从节点端口为6933。配置与6900节点类似,不再赘述。启动这两个节点: ./redis-server ../conf/cluster_m_6903.conf ./redis-server ../conf/cluster_s_6933.conf加…...
防止Selenium被检测 Google Chrome 125
背景 最近在使用selenium自动播放学习课程,相信大家也有一些类似的使用场景。 能自动化的事情,绝不自己干。 为防止被检测是机器人做题,刷视频,需要做一些小调整。 先来看作为服务方维护者,是如何检测是Selenium打…...
LeetCode 算法:螺旋矩阵c++
原题链接🔗:螺旋矩阵 难度:中等⭐️⭐️ 题目 给你一个 m 行 n 列的矩阵 matrix ,请按照 顺时针螺旋顺序 ,返回矩阵中的所有元素。 示例 1: 输入:matrix [[1,2,3],[4,5,6],[7,8,9]] 输出&…...

【全开源】医护上门系统小程序APP公众号h5源码
医护上门系统:健康守护,就在您身边 🚪引言:开启全新的医护模式 在快节奏的现代生活中,健康问题往往成为我们关注的焦点。而“医护上门系统”正是为了满足这一需求,将专业的医疗服务送到您的家中。这一创新…...

结构体<C语言>
导言 结构体是C语言中的一种自定义类型,它的值(成员变量)可以是多个,且这些值可以为不同类型,这也是和数组的主要区别,下面将介绍它的一些基本用法,包括:结构体的创建、结构体变量的…...
点云分割报告整理(未完成版-每天写一点)
体积占用网格表示对点进行体素化,然后使用3d卷积神经网络来学习体素级语义。由于点云的稀疏性,体素化效率低,为避免较高的计算成本而忽略了细节。此外,由于同一体素内的所有点都被赋予了相同的语义标签,因此精度受到限…...
python基础 002 - 1 基础语法
1 标识符(identifier),识别码,表明身份 身份证,ID 定义:在编程语言中标识符就是程序员自己规定的具有特定含义的词,比如类名称、属性名称、变量名等, 在Python 中,pyt…...

浅谈Web开发的三大主流框架:Angular、React和Vue.js
在现代Web开发领域,Angular、React和Vue.js作为三大主流前端框架,各自拥有独特的特点和优势,为开发者提供丰富的选择。让我们更深入地了解这三大框架,并通过一些小型样例来展示它们的特性。 Angular Angular是一个完整的前端框架…...

使用net.sf.mpxj读取project的.mpp文件
1、导入.mpp文件 public void importMppFile(String updateType, MultipartFile multipartFile) {try (InputStream inputStream multipartFile.getInputStream()) {// 读取文件的组件MPPReader mppReader new MPPReader();// 注意,如果在这一步出现了读取异常&a…...

ubuntu 22.04 升级到24.04
step1. sudo apt update sudo apt upgrade sudo apt dist-upgrade step2. sudo apt autoremove step3. sudo apt install update-manager-core step4. sudo vim /etc/update-manager/release-upgrades 将 Prompt 设置为 lts: Promptlts 保存并退出 step5. sudo do-r…...

FreeRTOS学习笔记-基于stm32(14)内存管理
一、FreeRTOS 内存管理简介 FreeRTOS有两种方法来创建任务,队列,信号量等,一种动态一种静态。静态方法需要手动定义任务堆栈。使用动态内存管理的时候 FreeRTOS 内核在创建任务、队列、信号量的时候会动态的申请 RAM。 我们在移植FreeRTOS时可…...

关于Lambert W函数
来源:R. M. Corless, G. H. Gonnet, D. E. G. Hare, D. J. Jeffrey, and D. E. Knuth, “On Lambert’s W function,” Adv. Comput. Math., vol. 5, pp. 329–359, May 1996, doi: 10.1007/BF02124750. 摘要 Lambert W函数被定义为函数 w ↦ w e w w \mapsto we^…...
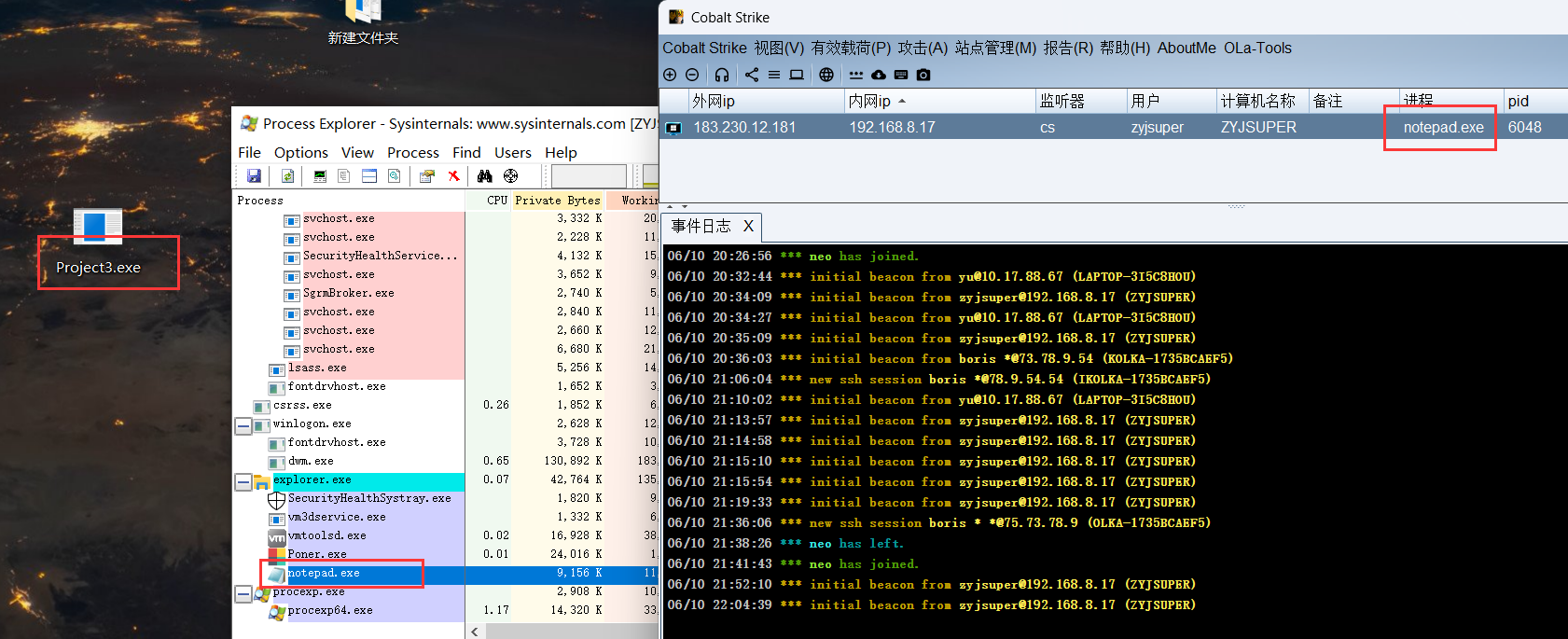
【免杀】C2远控-APC注入-进程镂空
目录 进程镂空&傀儡进程(主要过内存扫描)代码 傀儡进程演示如何上线上线演示 APC注入&进程欺骗(主要过内存扫描)同步调用与异步调用代码演示 进程镂空&傀儡进程(主要过内存扫描) 进程镂空(Pro…...
面试)
20240611 讯飞JAVA工程师(研发经理岗)面试
1.线程安全的集合类 在Java中,一些线程安全的集合类有Stack、Vector、Properties、Hashtable等 2.线程池中execute和submit的区别 1)参数及返回值不同 excute只能提交Runnable,无返回值 submit既可以提交Runnable,返回值为null&am…...

【研发日记】Matlab/Simulink软件优化(三)——利用NaNFlag为数据处理算法降阶
文章目录 前言 背景介绍 初始算法 优化算法 分析和应用 总结 前言 见《【研发日记】Matlab/Simulink软件优化(一)——动态内存负荷压缩》 见《【研发日记】Matlab/Simulink软件优化(二)——通信负载柔性均衡算法》 背景介绍 在一个嵌入式软件开发项目中,需要开…...

构建高效AI学习伙伴:从系统提示词到结构化交互设计
1. 项目概述:一个为学习者量身定制的AI交互模式最近在GitHub上看到一个挺有意思的项目,叫“learner-ai-mode”。光看名字,你可能会觉得这又是一个普通的AI应用或者学习工具。但当我深入去研究它的代码和设计理念后,发现它其实指向…...
)
面试记录 (2026/5/12)
问题一:java并发包下的AQS,了解多少? 这个真是没看过源码,就不班门弄斧了 直接学习下 大佬的经验 https://blog.csdn.net/qq_45772447/article/details/149126295?fromshareblogdetail&sharetypeblogdetail&sharerId149126295&…...

从苹果FBI解锁案看现代加密技术与工程师伦理抉择
1. 事件背景与核心争议点2016年初,美国联邦调查局(FBI)向苹果公司提出了一项史无前例的要求:协助解锁一部属于圣贝纳迪诺枪击案枪手的iPhone 5c。这部手机设置了密码保护,并启用了“数据自毁”功能,即在连续…...

为什么你的ChatGPT生成帖文零互动?揭秘Instagram 2024算法对AI内容的3重隐性过滤机制
更多请点击: https://intelliparadigm.com 第一章:为什么你的ChatGPT生成帖文零互动?揭秘Instagram 2024算法对AI内容的3重隐性过滤机制 Instagram 2024年Q2核心算法更新引入了「人类意图验证层(HIVL)」,该…...

Python 爬虫数据处理:重复页面数据智能合并去重
前言 在规模化 Python 爬虫采集项目中,重复页面数据是高频出现的核心问题,源于站点分页逻辑错乱、镜像页面分发、动态接口返回冗余数据、多入口同源页面采集等多重因素。重复数据若不做处理,不仅会造成数据库存储冗余、占用服务器资源&#…...
)
【OpenCV实战】从相机标定到PnP测距:手把手实现单目视觉定位(C++代码详解)
1. 相机标定基础与实战准备 单目视觉定位就像给机器人装上了一只"智慧之眼",而相机标定就是教会这只眼睛如何正确理解世界。想象一下,如果你戴了一副度数不合适的眼镜,看到的物体位置和形状都会失真——相机标定要解决的就是类似的…...

NSA 5G:从双连接到网络切片,解析5G组网演进之路
1. 非独立组网5G:一场关于“先有鸡还是先有蛋”的行业博弈如果你在2017年的世界移动通信大会(MWC)现场,可能会感到一丝困惑。前一年,整个行业还在为5G描绘一幅彻底颠覆4G、开启万物互联新纪元的宏伟蓝图。然而一年后&a…...

AI技能统一管理:用Obsidian插件Agentfiles构建你的智能编码中枢
1. 项目概述:一个为AI编码时代打造的技能中枢 如果你和我一样,日常开发工作流里已经塞满了各种AI编码助手——Claude Code、Cursor、Codex、Windsurf……那么你一定也面临过同样的困境:每个工具都有自己的一套“技能”或“记忆”系统…...

从数据中心视角聊token
“我爱你”被AI拆解成了3个tokens,“I love U”也同样被AI拆解成了3个tokens,AI将人类的语言拆解到可被数据分析的最小单位,叫做token,中文是词元,AI通过数据模型的分析,又将无数的token组成了答复反馈给用…...

中国半导体产业崛起:资本驱动下的存储器攻坚与全产业链布局
1. 行业格局的十字路口:当西方整合遇上东方崛起最近几年,半导体行业的头条新闻几乎被一系列重磅并购案所占据:恩智浦收购飞思卡尔、安华高并购博通、英特尔鲸吞阿尔特拉。这些动辄数百亿美元的巨无霸交易,背后传递出一个清晰的信号…...