自动驾驶#芯片-1
概述
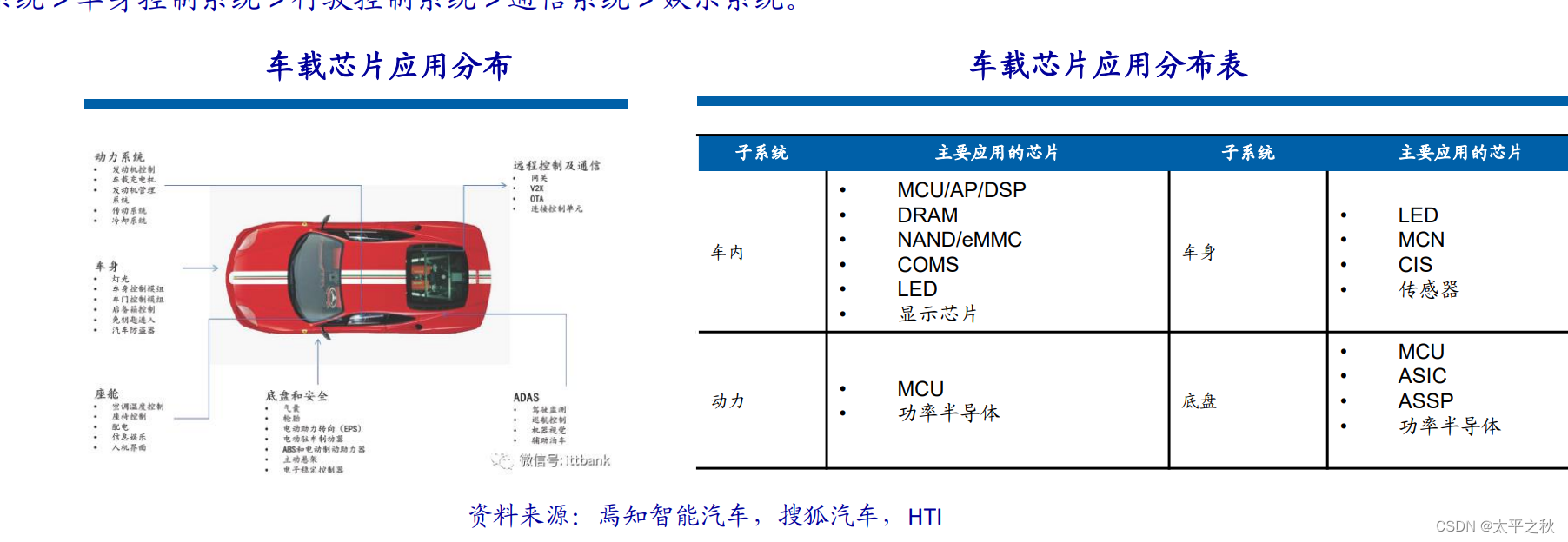
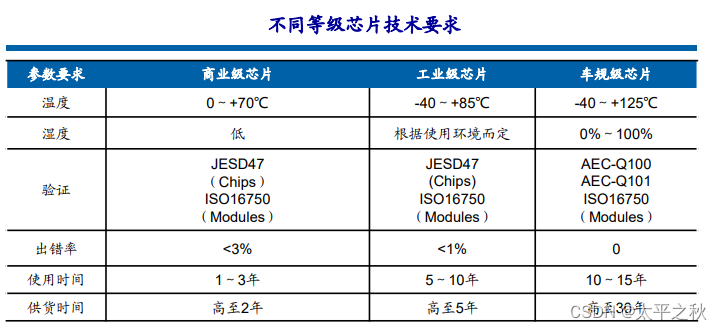
汽车是芯片应用场景之一,汽车芯片需要具备车规级。 车规级芯片对加工工艺要求不高,但对质量要求高。需要经过的认证过程,包括质量管理标准ISO/TS 16949、可靠性标准 AEC-Q100、功能安全标准ISO26262等。 汽车内不同用途的芯片要求也不同,美国制定的汽车电子标准把其分为5级。汽车各系统对芯片要求由高到低依次是:动力安 全系统 > 车身控制系统 > 行驶控制系统 > 通信系统 > 娱乐系统。
自动驾驶芯片产品趋势:一体化
云和边缘计算的数据中心,以及自动驾驶等超级终端领域,都是典型的复杂计算场景,这类场景的计算平台都是典型的大算 力芯片。大芯片的发展趋势已经越来越明显的从GPU、DSA的分离趋势走向DPU、超级终端的再融合,未来会进一步融合成超 异构计算宏系统芯片。
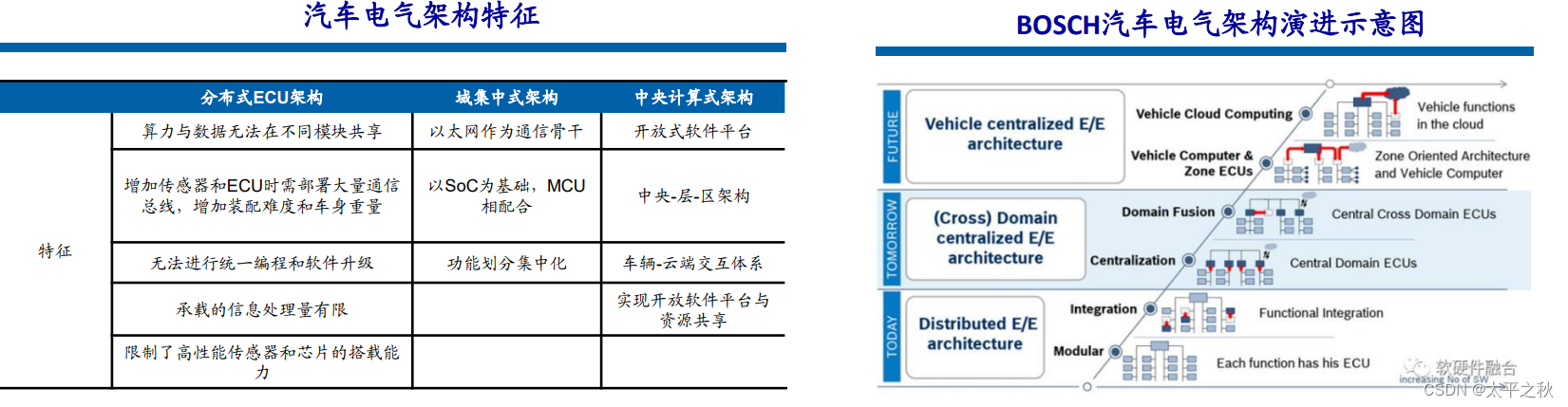
BOSCH给出了汽车电气架构演进示意图。从模块级的ECU到集中相关功能的域控制器,再到完全集中的车载计算机。每个阶段 还分了两个子阶段,例如完全集中的车载计算机还包括了本地计算和云端协同两种方式。
英伟达一体化方案(thor 芯片官网信息)
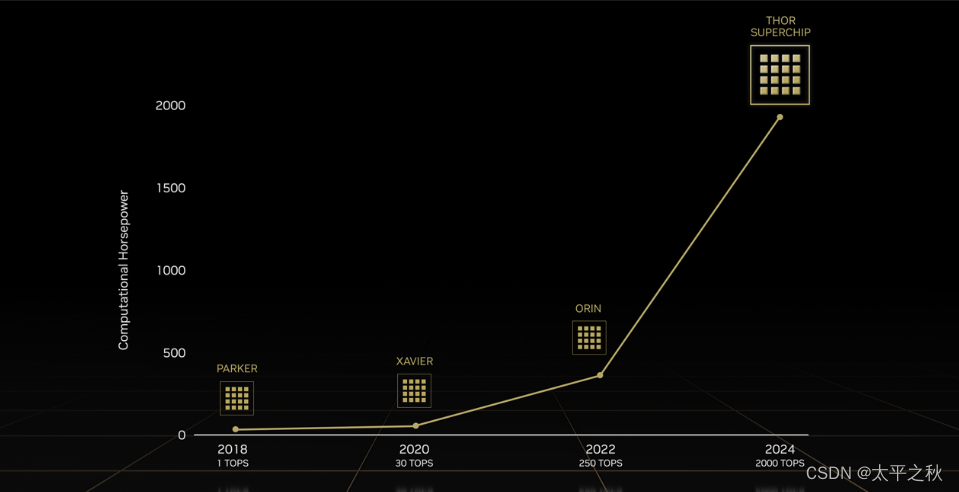
2022年NVIDIA 创始人兼首席执行官黄仁勋公布了一款令人惊艳的超级芯片——DRIVE Thor。这款车规级系统级芯片 (SoC) 基于最新 CPU 和 GPU 打造,可提供每秒 2000 万亿次浮点运算性能,在大幅度提升性能的同时降低整体系统的运行成本。
DRIVE Thor 将逐步接替 DRIVE Orin,以最新的计算技术,加速智能汽车技术在行业内的部署,赋能汽车制造商的 2025 年车型。
借助DRIVE Thor,汽车制造商可以在单个系统级芯片上高效整合数字仪表盘、信息娱乐、泊车、辅助驾驶等多种功能,从而极大地提高开发效率和软件更新迭代的速度。
DRIVE Thor 能够被配置为多种模式,可以将其 2000 TOPS 和 2000 TFLOPS 全部用于自动驾驶工作流,也可以进行拆分,将其配置为一部分用于驾驶舱 AI 和信息娱乐功能,一部分用于辅助驾驶。
与当前的 NVIDIA DRIVE Orin 一样,DRIVE Thor可以利用高效的 NVIDIA DRIVE 软件开发套件,且已获得 ASIL-D级功能安全产品认证。同时,DRIVE Thor 基于可扩展架构打造,因而开发人员可以将过去的软件开发成果无缝移植到新平台。
DRIVE Thor,快如闪电
除了原始性能之外,DRIVE Thor 在深度神经网络 (DNN) 准确性方面也实现了惊人的飞跃。
此外,DRIVE Thor 也是首个采用推理 Transformer 引擎的NVIDIA自动驾驶汽车平台。Transformer 引擎是 NVIDIA GPU Tensor Core 的一个全新组件。Transformer 网络将视频数据作为单个感知帧来处理,使计算平台能够随着时间的推移具有处理更多数据的能力。
凭借着 8 位浮点(FP8)的精度,DRIVE Thor为汽车领域引入了一种新的数据处理方式。传统意义上讲,开发人员在从32 位浮点转换为 8 位整数 (8-int) 的数据格式时,会发现准确性有所下降。DRIVE Thor的FP8精度有助于促进数据的转换,允许开发人眼在不牺牲准确性的情况下进行数据传输。
此外,DRIVE Thor还采用了升级后的ARM Poseidon AE内核,这也让其成为业界最高性能的处理器之一。
一芯多用 多域计算
DRIVE Thor 不仅功能强劲,且运行高效。
DRIVE Thor能够进行多域计算,这意味着它可以将自动驾驶、车载信息娱乐等功能划分为不同的任务区间,同时运行,互不干扰。多计算域隔离能力,可支持时间关键型的进程不间断同时运行,也就是说,车辆在一台计算机上可以同时运行 Linux、QNX 和 Android。
这些类型不同的功能,通常由分布在车辆各处的数十个电子控制单元控制。如今,汽车制造商可借助DRIVE Thor隔离特定任务的能力,告别分布式的电子控制单元,整合全车功能。
汽车制造商可以借助 DRIVE Thor 在单个 SoC 上整合智能汽车所有功能
此外,DRIVE Thor芯片也可以让车辆所有的显示器、传感器等都连接到单一芯片上,极大地简化了汽车制造的复杂程序,这也是汽车电子电气架构从分布式向集中式演进的大势所趋。
NVLink-C2C 芯片互连技术
单独使用一个 DRIVE Thor 即可实现卓越性能,那么两个一起呢?用户可以单独使用 DRIVE Thor 芯片,也可以通过最新的 NVLink-C2C 芯片互连技术同时连接两个 Thor芯片,使两个芯片作为单一操作系统的统一平台。NVLink-C2C 的优势在于它能够以最小的开销在超高速数据传输链路中共享、调度和分发任务。在软件定义汽车的发展趋势下,这为汽车制造商带来足够大的算力冗余和灵活性,支持软件定义车辆的开发,这些车辆可通过安全的 OTA 更新持续升级。

高通一体化方案
2020年CES上,高通推出全新自动驾驶平台高通Snapdragon Ride,自动驾驶芯片“骁龙 Ride”。 该平台包括安全系统级芯片SoC(ADAS应用处理器)、安全加速器(自动驾驶专用加速器)和自动驾驶软件栈,可支持L1-L5 级别的自动驾驶;安全系统级芯片SoC和安全加速器的功能安全安全等级为ASIL-D级;平台高度可扩展、开放、完全可定制化, 且能够提供功耗高度优化的自动驾驶解决方案;平台将于2020年上半年交付OEM和Tire1进行前期开发,搭载该平台的汽车预 计将于2023年投产。
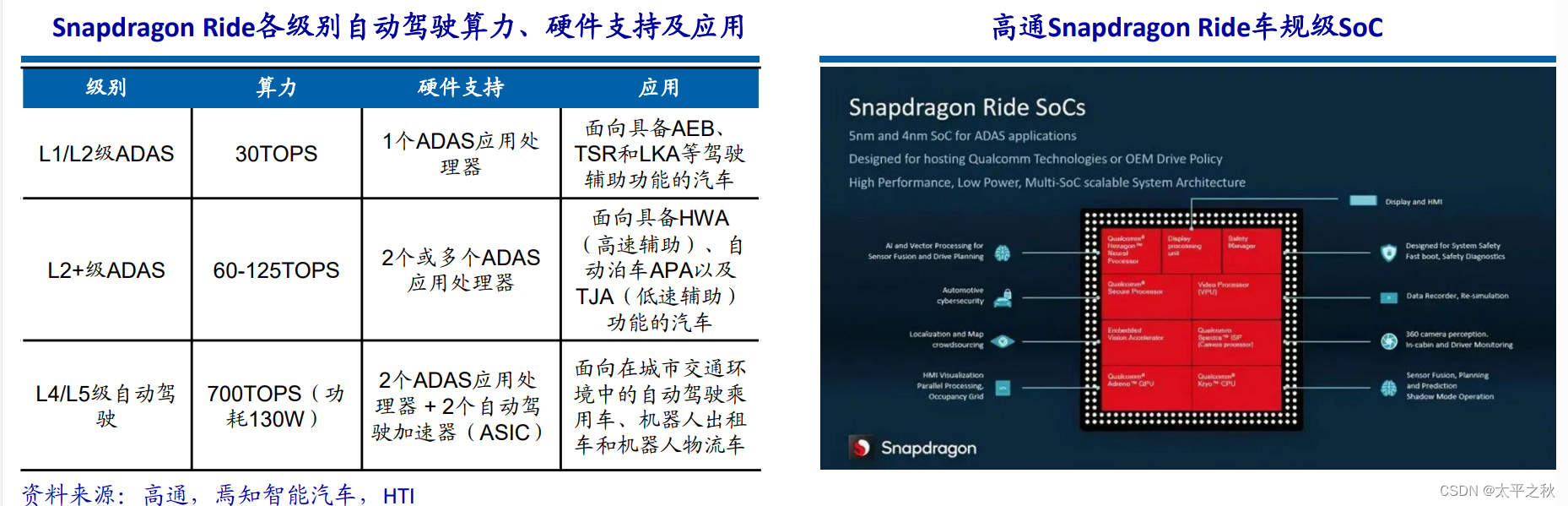
Snapdragon Ride视觉系统是基于4纳米制程的系统级芯片(SoC)打造,集成了专用高性能的Snapdragon Ride SoC和Arriver下一 代视觉感知软件栈,并采用基于定制神经网络架构开发的800万像素广角摄像头。

就在英伟达发布 Thor 两天后,高通就推出“业内首个集成式汽车超算 SOC”Snapdragon Ride Flex,单颗算力 600TOPS 以上, 综合 AI 算力能够达到 2000TOPS。Snapdragon Ride Flex确切的说是一个SoC产品家族,其包括Mid、High、Premium三个级别。 最高级的Ride Flex Premium SoC再加上外挂的AI加速器(可能是NPU,MAC阵列)组合起来,就可以实现2000TOPS的综合AI算 力。Snapdragon Ride Flex作为一个超算芯片家族,其最大的目标是实现车内的中央计算——即同时为智能驾驶、智能座舱、通 信等能力提供计算支持,这也与英伟达Thor雷神芯片一致。
向先进制程延伸
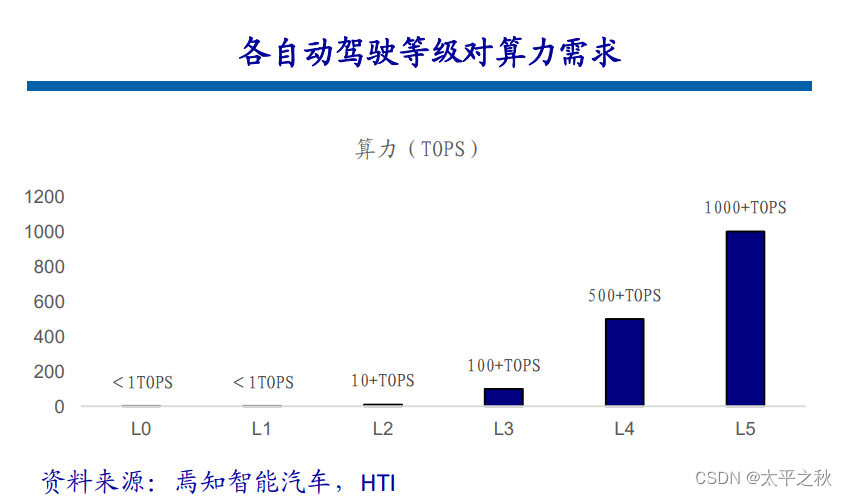
高端自动驾驶芯片向先进制程延申:用于L1-L2 自动驾驶的芯片只需要28nm制程即可制造,L3 及以上的高阶自动驾驶对算力 的要求越发苛刻,规划中针对L4/L5 自动驾驶的SoC芯片普遍需要7nm,甚至5nm的先进制程。先进的制程可以影响功耗,先 进的制程又可以影响集成度;而功耗则影响可靠性,集成度影响性能。 目前的 5nm制程芯片尚处于研发或发布状态,均未进入量产阶段;不过 7nm芯片中,已有 Orin、FSD、EyeQ5、8155 等芯片实 现量产,其他芯片则在未来几年陆续实现量产,这预示着先进制程车用芯片开始进入量产加速期。

高算力
三种主流架构
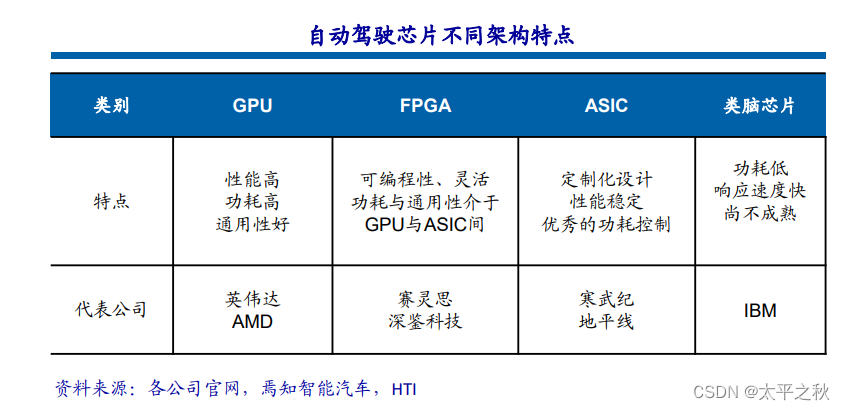
当前主流的AI芯片主要分为三类,GPU、FPGA、ASIC。GPU、FPGA均是前期较为成熟的芯片架构,属于通用型芯片。
CPU遵循的是冯·诺依曼架构,其核心是存储程序/数据、串行顺序执行。因此CPU的架构中需要大量的空间去放置存储单 元(Cache)和控制单元(Control),相比之下计算单元(ALU)只占据了很小的一部分,所以CPU在进行大规模并行计 算方面受到限制,相对而言更擅长于处理逻辑控制。
GPU(GraphicsProcessing Unit),即图形处理器,是一种由大量运算单元组成的大规模并行计算架构,早先由CPU中分出 来专门用于处理图像并行计算数据,专为同时处理多重并行计算任务而设计。GPU中也包含基本的计算单元、控制单元 和存储单元,但GPU的架构与CPU有很大不同,其架构图如下所示。
与CPU相比,CPU芯片空间的不到20%是ALU,而GPU芯片空间的80%以上是ALU。即GPU拥有更多的ALU用于数据并行处理。
CPU 由专为顺序串行处理而优化的几个核心组成,而 GPU 则拥有一个由数以千计的更小、更高效的核心组成的大规模并 行计算架构,这些更小的核心专为同时处理多重任务而设计。
CPU和GPU之所以大不相同,是由于其设计目标的不同,它们分别针对了两种不同的应用场景。CPU需要很强的通用性来 处理各种不同的数据类型,同时又要逻辑判断又会引入大量的分支跳转和中断的处理。这些都使得CPU的内部结构异常复 杂。而GPU面对的则是类型高度统一的、相互无依赖的大规模数据和不需要被打断的纯净的计算环境。
GPU 的众核体系结构包含几千个流处理器,可将运算并行化执行,大幅缩短模型的运算时间。 目前 GPU 已经发展到了较为成熟的阶段。利用 GPU 来训练深度神经网络,可以充分发挥其数以千计计算核心的高效并行 计算能力,在使用海量训练数据的场景下,所耗费的时间大幅缩短,占用的服务器也更少。如果针对适当的深度神经网络进行合理优化,一块 GPU 卡可相当于数十甚至上百台 CPU服务器的计算能力,因此 GPU 已经成为业界在深度学习模型 训练方面的首选解决方案。
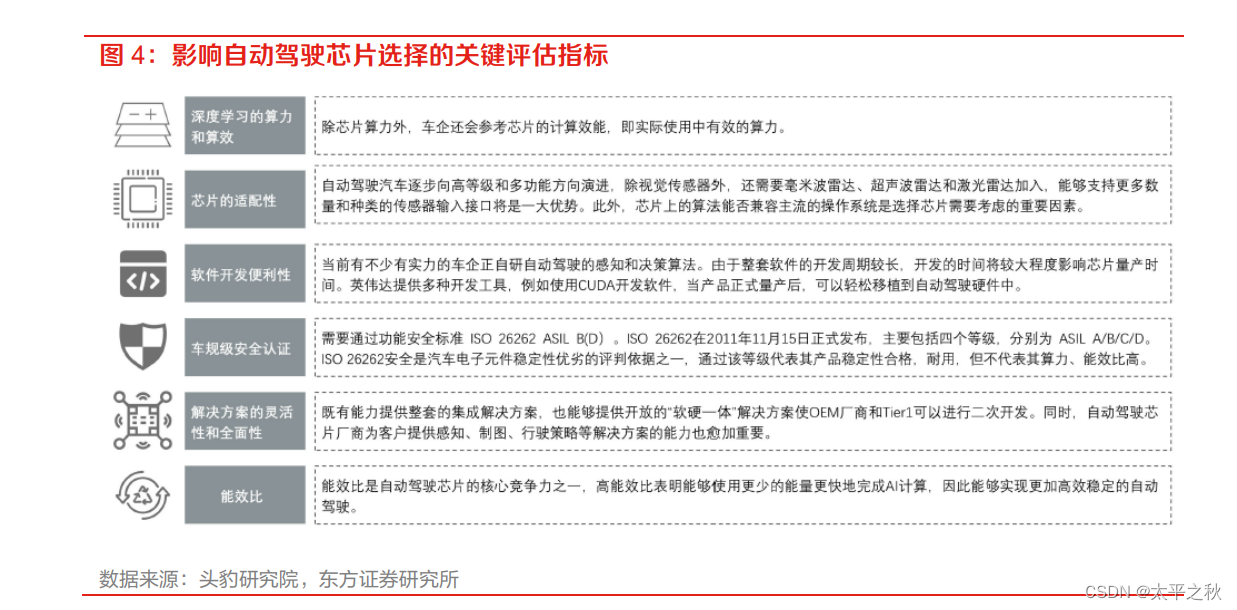
芯片关键评估指标
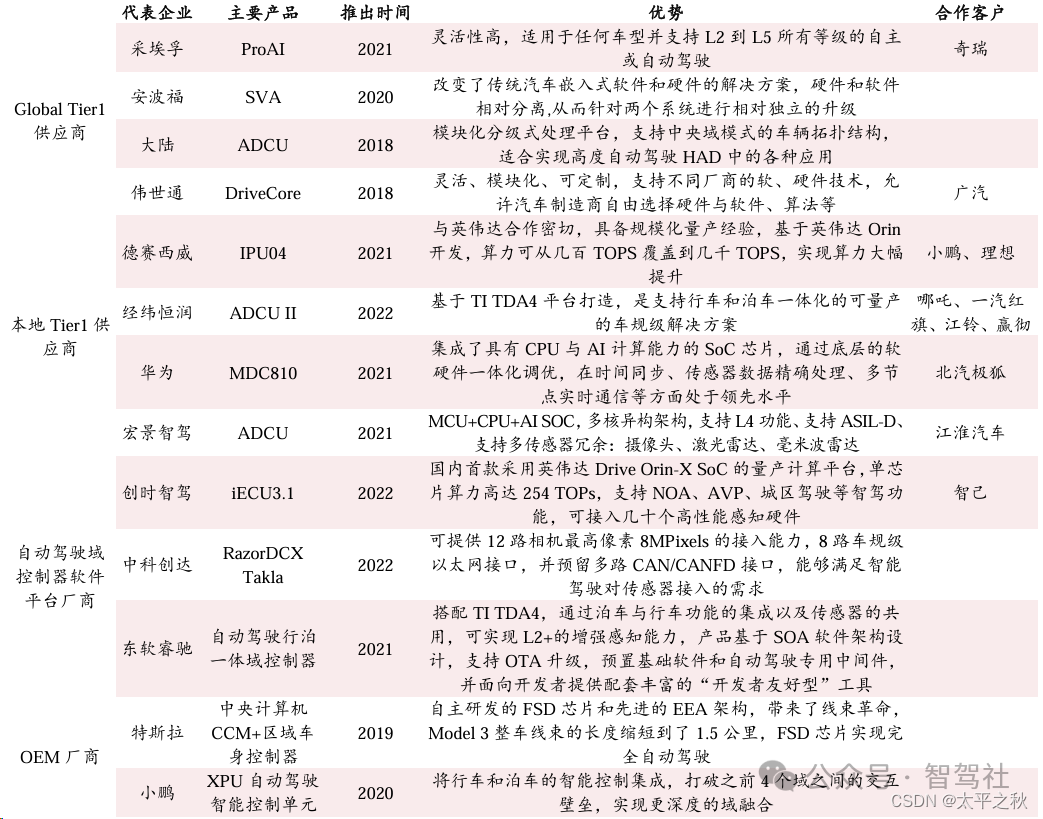
国内外智驾域控制器方案
资料引用:
海通国际-电子行业:自动驾驶芯片研究框架-230115.pdf (dfcfw.com)
英伟达官网
相关文章:
自动驾驶#芯片-1
概述 汽车是芯片应用场景之一,汽车芯片需要具备车规级。 车规级芯片对加工工艺要求不高,但对质量要求高。需要经过的认证过程,包括质量管理标准ISO/TS 16949、可靠性标准 AEC-Q100、功能安全标准ISO26262等。 汽车内不同用途的芯片要求…...

【保姆级讲解下QT6.3】
🎥博主:程序员不想YY啊 💫CSDN优质创作者,CSDN实力新星,CSDN博客专家 🤗点赞🎈收藏⭐再看💫养成习惯 ✨希望本文对您有所裨益,如有不足之处,欢迎在评论区提出…...
windows安装conda
1 Conda简介 Conda 是一个开源的软件包管理系统和环境管理系统,用于安装多个版本的软件包及其依赖关系,并在它们之间轻松切换。Conda 是为 Python 程序创建的,适用于 Linux,OS X 和Windows,也可以打包和分发其他软…...

ubuntu设置GPU功率
前言 上次发了一篇文章,我使用脚本自动根据GPU温度调整服务器风扇转速 但是我实测之后,发现这个方法还是压不住我GPU的温度,暂时不清楚什么原因 所以我准备把GPU功耗压低 先看看gpu的功耗限制 nvidia-smi -q -d POWER使用上面的命令会输出…...
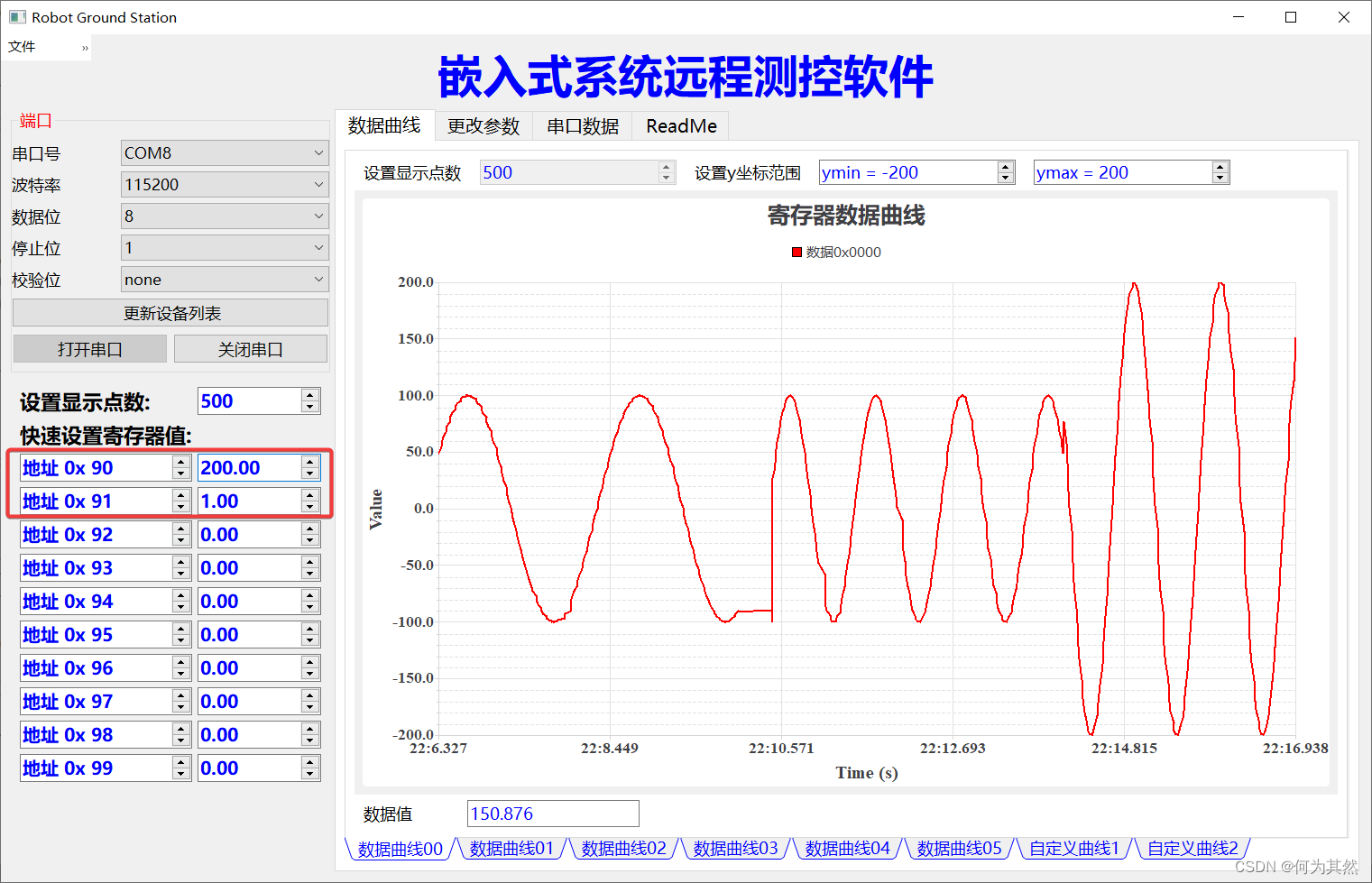
[发布]嵌入式系统远程测控软件-基于Qt
目录 一. 引言二. 软件功能2.1 原理2.2 软件功能2.3 运行环境 三. 软件操作使用3.1 软件界面3.2 软件功能使用详解3.2.1 连接3.2.2 数据监测(串口示波器)3.2.3 数据修改3.2.4 数据保存 3.3 软件的硬件连接 四. 通信协议——STM32移植篇4.1 通信协议4.2 S…...
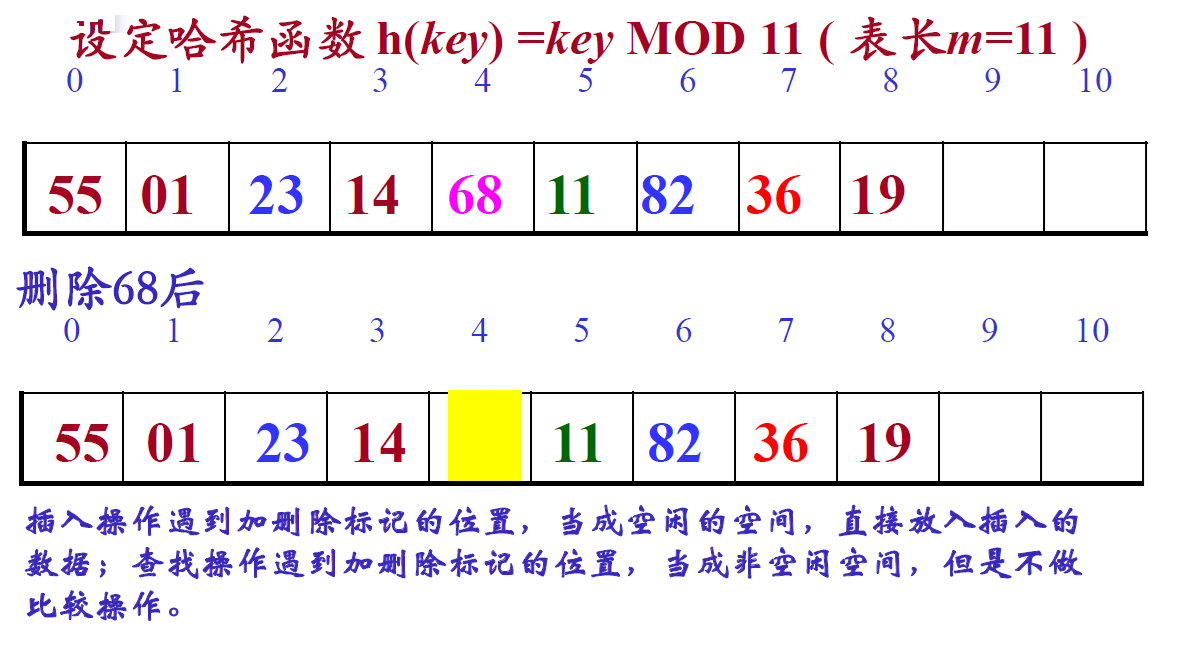
【数据结构】查找(顺序查找、二分查找、索引顺序查找、二叉排序树、平衡排序树、B树、B+树、哈希表)
目录 数据结构——查找何为查找1. 查找表2. 关键字3. 查找方法效果评价指标——平均查找长度ASL(Average Search Length) 静态查找表1.顺序查找2.二分查找二分查找判定树 3.静态查找表—索引顺序表的查找索引顺序查找表的算法原理: 动态查找树表1. 二叉排序树2. 二叉…...

远程连接路由器:方法大全与优缺点解析
远程连接路由器的方式主要有以下几种,以下是每种方式的详细说明及其优缺点: 使用Web浏览器登录 方法:通过配置路由器的远程管理功能,允许用户通过互联网浏览器访问路由器的管理界面。用户只需输入路由器的公网IP地址或域名&#…...

NI USB-6009 DAQ采集卡拆解
所需设备: 1、NI USB-6009采集卡; 2、逻辑分析仪; NI USB-6009采集卡全貌: 性能参数: 内部照片: ADC芯片指标: 接线图: 差分模式采样: 采集过程中的SPI总线数据监控&a…...

详细分析Mysql临时变量的基本知识(附Demo)
目录 前言1. 用户变量2. 会话变量 前言 临时变量主要分为用户变量和会话变量 1. 用户变量 用户变量是特定于会话的,在单个会话内可以在多个语句中共享 以 符号开头在 SQL 语句中使用 SET 语句或直接在查询中赋值 声明和赋值 SET var_name value; -- 或者 SE…...

JS的五种事件函数,各自应用场景又分别是什么
在JavaScript中,常用的五种事件函数包括: 1. onclick:当用户点击某个元素时触发,适用于处理按钮点击、链接点击等场景。 2. onkeydown:当用户按下某个键盘的按键时触发,适用于处理键盘输入相关的操作&#…...

电脑想加个WIFI功能,怎么选!
在快速发展的物联网和智能家居时代,Wi-Fi模块作为连接各类智能设备与互联网的桥梁,其重要性不言而喻。而为了让这些模块能够适应各式各样的应用场景,不同的接口技术应运而生。今天,我们就来深入浅出地探讨几种常见的Wi-Fi模块接口,包括它们的工作原理、特点以及适用场景,…...

机器学习——决策树
决策树 决策树可以理解为是一颗倒立的树,叶子在下端,根在最上面 一层一层连接的是交内部节点,内部节点主要是一些条件判断表达式,叶子叫叶节点,叶节点其实就是最终的预测结果,那么当输入x进去,…...

弘君资本:苹果股价暴涨,创历史新高!
当地时间6月11日,美股三大指数涨跌纷歧,标普500指数与纳指再创新高。 到收盘,道指跌0.31%,纳指涨0.88%,标普500指数涨0.27%。 苹果大涨逾7%创前史新高。美联储开端召开6月货币方针会议,周三发布利率决定。…...

web前端拖拽工具:探索其复杂性、困惑度与爆发度
web前端拖拽工具:探索其复杂性、困惑度与爆发度 在Web前端开发中,拖拽功能是一项常见且复杂的需求。拖拽工具可以帮助开发者更高效地实现这一功能,但同时也带来了一定的困惑和挑战。本文将从四个方面、五个方面、六个方面和七个方面对Web前端…...

Web前端数据驱动视图的深度解析
Web前端数据驱动视图的深度解析 在Web前端开发中,数据驱动视图的概念日渐重要,它不仅改变了传统的开发模式,更使得页面动态化和交互性得到了极大的提升。然而,对于许多初学者和开发者来说,如何深入理解和应用这一概念…...

HTML5的新语义化标签
HTML5 引入了一系列新的语义化标签,这些标签为网页内容提供了更明确的含义,有助于改善网页的可访问性和搜索引擎优化(SEO)。以下是一些主要的 HTML5 语义化标签: <article>: 表示页面、应用或网站中…...

周一美股集体低开后转涨,早盘仅道指小幅下跌,英伟达跌超3%后转涨超1%
美国非农就业报告发布“次日”,三大股指低开,但早盘均成功转涨。美股七姐妹涨跌各异,苹果WWDC大会今晚开幕,但早盘转跌,一度跌超1%;1拆10股正式生效的英伟达盘初曾跌超3.2%,开盘1.5小时内首次转…...

Phybers:脑纤维束分析软件包
摘要 本研究提供了一个用于分析脑纤维束数据的Python库(Phybers)。纤维束数据集包含由表示主要白质通路的3D点组成的流线(也称为纤维束)。目前已经提出了一些算法来分析这些数据,包括聚类、分割和可视化方法。由于流线的几何复杂性、文件格式和数据集的大小(可能包…...
手机丢失不惊慌,华为手机已升级至楼层级设备查找!
出门总是丢三落四,手机丢了怎么办?不要怕,只要你的华为手机升级至云空间新版本,就可以进行楼层级设备查找,现在可以查看到具体的楼层了! 之前有手机丢失过的朋友,肯定有相似的经历,…...

SpringBoot 的多配置文件
文章目录 SpringBoot 的多配置文件spring.profiles.active 配置Profile 和 ActiveProfiles 注解 SpringBoot 的多配置文件 spring.profiles.active 配置 默认情况下,当你启动 SpringBoot 项目时,会在日志中看到如下一条 INFO 信息: No act…...

Keil MDK中自定义CMSIS代码模板实战指南
1. 自定义CMSIS用户代码模板的完整指南作为一名嵌入式开发老手,我经常需要在Keil MDK环境中创建各种RTOS任务模板。官方提供的模板虽然好用,但实际项目中我们往往需要根据公司编码规范或特定硬件平台定制专属模板。今天我就来分享如何在CMSIS环境中添加自…...

【Linux驱动开发】第12天:Linux设备树核心:树形结构+节点+属性 完整全解
目录 设备树树形结构概述节点(Node)全解:命名规范标准节点常用设备节点属性(Property)全解:类型核心属性总线专用属性标签与节点引用:设备树复用的核心常见错误与注意事项总结:驱动…...

PINNs赋能QSPR:将物理定律编译进分子性质预测模型
1. 这不是又一个黑箱模型:当物理规律成为神经网络的“硬约束”你有没有试过训练一个深度学习模型去预测某种新型有机分子的沸点,结果在训练集上R高达0.98,一拿到实验室刚测出来的5个新化合物数据,预测误差就飙到40℃?我…...

2026 收藏版|程序员转行 AI 大模型应用开发,5 步零基础上岸学习路线
身为程序员,或是打算跨界进军AI应用开发赛道的朋友,真心建议大胆投递岗位,别被招聘简章里严苛的任职要求劝退。诸如精通大模型底层原理、具备多年AI从业经验这类条件,大多只是企业理想招聘标准。 身边不少同行都是秉持先入职深耕、…...

【无人机通信】无线通信网络中无人机UAV定位与带宽分配的优化算法在确保地面用户服务质量QoS约束的同时,最大化网络吞吐量附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室👇 关注我领取海量matlab电子书和数学建模资料 dz…...

毕业论文难写?2026年AI论文工具排行榜权威发布,一次过审不是梦!
写论文没思路、改稿没头绪、查重总翻车?别慌!2026 年最新 AI 论文写作工具合集来了,覆盖选题、大纲、初稿、润色、降重、格式、文献引用全流程,帮你一键匹配最适合的学术助手,高效完成论文不踩坑!…...

终极AMD Ryzen调试工具:SMUDebugTool完全使用指南
终极AMD Ryzen调试工具:SMUDebugTool完全使用指南 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https://gitcod…...

终极游戏库管理器Playnite:一站式管理20+平台游戏的最佳解决方案
终极游戏库管理器Playnite:一站式管理20平台游戏的最佳解决方案 【免费下载链接】Playnite Video game library manager with support for wide range of 3rd party libraries and game emulation support, providing one unified interface for your games. 项目…...

一个简单的MCP代码示例
MCP项目测试示例from fastmcp import FastMCP# 1. 创建 MCP 服务器实例 mcp FastMCP("MyFirstServer")# 2. 定义一个工具(Tool):AI 可以调用的函数 mcp.tool() def add(a: int, b: int) -> int:"""将两个数字相…...

2026学生开发者指南:AI时代最值得掌握的10个Java+AI技能点
写在前面2026年的技术圈有个共识——AI Agent不是“会不会来”,而是“已经全面渗透”。但很多学生朋友问我:“我是Java背景,是不是必须转Python才能搞AI?”我的回答一直是:恰恰相反。当AI从“写脚本”走向“构建系统”…...