5.2 对射式红外传感器旋转编码器计次
对射式红外传感器
1.1 接线图

VCC GND分别接电源的正负极
DO数字输出端,随意选择一个GPIO口
1.2 硬件原理
当挡光片或者编码盘在对射式红外传感器中间经过时,DO就会输出电平变化信号,电平跳变信号触发STM32 PB14号口中断,在中断函数中执行变量++程序,并在主循环里调用OLED中显示变量。
1.3 设计思路
本次设计采用模块化编程,分为CountSensor.c、CountSensor.h、main.c三部分。
先进行初始化
EXTI(中断)配置
1. 第⼀步,配置RCC,把所涉及到的外设时钟都打开 (GPIOB,AFIO(NVIC,EXTI无需打开)) 2. 第⼆步,配置GPIO,选择端口为输⼊模式 3. 第三步,配置AFIO,选择使⽤的⼀路GPIO,连接到EXTI 4. 第四步,配置EXTI,选择边沿触发⽅式,选择触发响应⽅式 5. 第五步,配置NVIC,给中断选择⼀个合适的优先级
最后通过NVIC,外部中断信号进入CPU,CPU收到中断信号,跳转到中断函数里执行中断程序。
EXTI和NVIC时钟默认是打开的,NVIC是内核的外设,内核的外设都不需要开启时钟,RCC 管的都是内核外的外设
1.4 知识储备 AFIO
复位AFIO外设
void GPIO_AFIODeInit(void);锁定GPIO配置函数
锁定引脚的配置,防⽌意外更改
void GPIO_PinLockConfig(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin);配置AFIO的事件输出功能函数
void GPIO_EventOutputConfig(uint8_t GPIO_PortSource,uint8_tGPIO_PinSource);
void GPIO_EventOutputCmd(FunctionalState NewState);引脚重映射函数
void GPIO_PinRemapConfig(uint32_t GPIO_Remap,FunctionalStateNewState);配置AFIO的数据选择器
通过配置AFIO数据选择器,选择中断引脚。
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource,uint8_tGPIO_PinSource);恢复上电默认的状态函数
void EXTI_DeInit(void);1.5 知识储备EXTI
清除EXTI配置,恢复上电默认的状态函数
void EXTI_DeInit(void);根据结构体配置EXTI外设函数
void EXTI_Init(EXTI_InitTypedef* EXTI_InitStruct);给传⼊的结构体参数赋⼀个默认值函数
void EXTI_StructInit(EXTI_InitTypedef* EXTI_InitStruct);软件触发外部中断函数
调用函数,参数给⼀个指定的中断线,就能软件触发⼀次这个外部中断
void EXTI_GenerateSWInterrupt(uint32_t EXTI_Line);下面四个是库函数的模板函数
在主程序里查看和清除标志位用下面两个函数
获取指定的标志位是否被置1
FlagStatus EXTI_GetFlagStatus(uint32_t EXTI_Line);对置1的标志位进⾏清除函数
void EXTI_ClearFlag(uint32_t EXTI_Line);在中断函数里查看和清除标志位用下面两个
在中断函数中获取标志位函数
ITStatus EXTI_GetITStatus(uint32_t EXTI_Line);清除中断挂起标志位函数
void EXTI_ClearITPendingBit(uint32_t EXTI_Line);1.6 知识储备NVIC
中断分组函数
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup);根据结构体⾥⾯的参数初始化NVIC函数
void NVIC_Init(NVIC_InitTypedef* NVIC_InitStruct);设置中断向量表函数
NVIC_SetVectorTable函数的功能是设置向量表的位置和偏移。其中输⼊参数中,对于32位 的OFFSET向量表基地址的偏移量对于FLASH,参数值必须⾼于0x08000100,对于RAM必 须⾼于0X100
void NVIC_SetVectorTable(uint8_t NVIC_VectTab,uint32_t Offset);系统低功耗配置函数
void NVIC_SystemLPConfig(uint8_t LowPowerMode,FunctionalStateNewState)注意:中断函数要简短快速,不要在中断中执⾏Delay
1.7 程序设计
CountSensor.c
#include "stm32f10x.h" // Device headeruint16_t CountSensor_Count;void CountSensor_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//开启GPIOB的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//开启AFIO的时钟//配置GPIOGPIO_InitTypeDef GPIO_InitStructure;//定义初始化结构体GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;//开启引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//设置响应速度GPIO_Init(GPIOB, &GPIO_InitStructure);//配置参数//配置AFIOGPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);//配置AFIO外部中断引脚选择//配置EXTIEXTI_InitTypeDef EXTI_InitStructure;//定义外部中断结构体EXTI_InitStructure.EXTI_Line = EXTI_Line14;//指定配置中断线EXTI_InitStructure.EXTI_LineCmd = ENABLE;//开启中断线路EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断模式EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发EXTI_Init(&EXTI_InitStructure);//写入参数//指定中断分组NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;//定义NVIC结构体NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;//设置中断通道NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//通道使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//抢占优先级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//响应优先级NVIC_Init(&NVIC_InitStructure);//写入参数
}
//返回中断统计次数
uint16_t CountSensor_Get(void)
{return CountSensor_Count;
}
//中断函数
void EXTI15_10_IRQHandler(void)
{if (EXTI_GetITStatus(EXTI_Line14) == SET)//中断标志位判断是否为1{/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0){CountSensor_Count ++;//统计中断返回次数}EXTI_ClearITPendingBit(EXTI_Line14);//清除中断标志位}
}
CountSensor.h
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_Hvoid CountSensor_Init(void);
uint16_t CountSensor_Get(void);#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"int main(void)
{OLED_Init();CountSensor_Init();OLED_ShowString(1, 1, "Count:");/1行1列显示Count:while (1){OLED_ShowNum(1, 7, CountSensor_Get(), 5);//一行七列显示返回次数,长度为5}
}
2. 旋转编码器计次
2.1 接线图
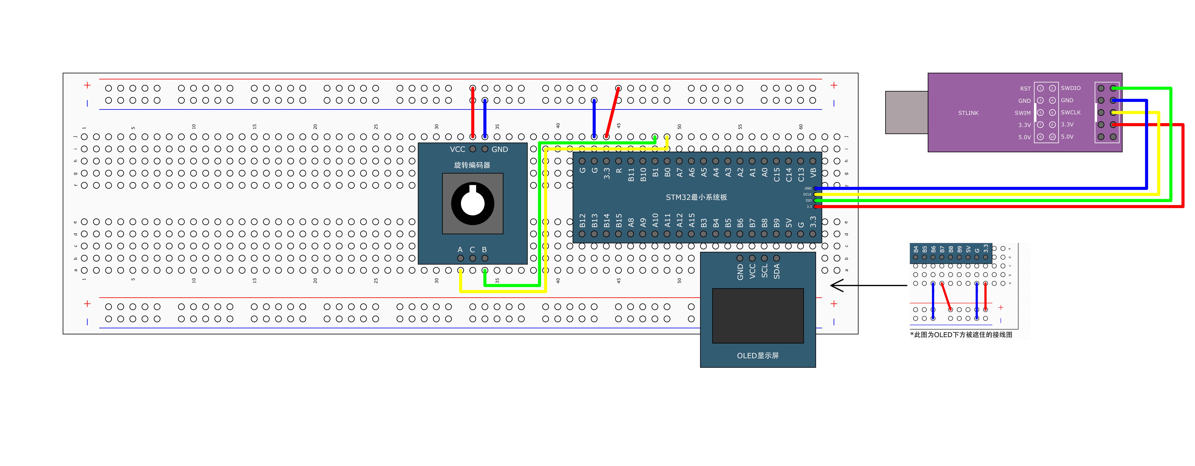
VCC GND接正负极,A,B相输出引脚,接到STM32的PB0和PB1引脚。
2.2 设计思路
本设计采用模块化编程,分为Encoder.c、Encoder.h、mian.c三部分。
2.3 程序设计
Encoder.c
#include "stm32f10x.h" // Device headerint16_t Encoder_Count;void CountSensor_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//开启GPIOB的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//开启AFIO的时钟//配置GPIOGPIO_InitTypeDef GPIO_InitStructure;//定义初始化结构体GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 |GPIO_Pin_1;//开启引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//设置响应速度GPIO_Init(GPIOB, &GPIO_InitStructure);//配置参数//配置AFIOGPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);//配置AFIO外部中断引脚选择GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1); //配置EXTIEXTI_InitTypeDef EXTI_InitStructure;//定义外部中断结构体EXTI_InitStructure.EXTI_Line = EXTI_Line14;//指定配置中断线EXTI_InitStructure.EXTI_LineCmd = ENABLE;//开启中断线路EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断模式EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发EXTI_Init(&EXTI_InitStructure);//写入参数//指定中断分组NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;//定义NVIC结构体NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;//设置中断通道NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//通道使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//抢占优先级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//响应优先级NVIC_Init(&NVIC_InitStructure);//写入参数NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;//设置中断通道NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//通道使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//抢占优先级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;//响应优先级NVIC_Init(&NVIC_InitStructure);//写入参数
} int16_t Encoder_Get(void)
{int16_t Temp;//定义临时变量,方便Count清零Temp = Encoder_Count;Encoder_Count = 0;return Temp;
}void EXTI0_IRQHandler(void)
{if (EXTI_GetITStatus(EXTI_Line14) == SET)//中断标志位判断是否为1{/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)//读取输入高低电平{if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){Encoder_Count --;}}EXTI_ClearITPendingBit(EXTI_Line14);//清除中断标志位}
}void EXTI1_IRQHandler(void)//线路1中断函数
{if (EXTI_GetITStatus(EXTI_Line14) == SET)//中断标志位判断是否为1{/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)//读取输⼊⾼低电平{if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0){Encoder_Count ++;}}EXTI_ClearITPendingBit(EXTI_Line14);//清除中断标志位}
}
Encoder.h
#ifndef __ENCODER_H
#define __ENCODER_Hvoid Encoder_Init(void);
int16_t Encoder_Get(void);#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"int16_t Num;int main(void)
{OLED_Init();Encoder_Init();OLED_ShowString(1, 1, "Num:");while (1){Num += Encoder_Get();OLED_ShowSignedNum(1, 5, Num, 5);}
}
完
相关文章:
5.2 对射式红外传感器旋转编码器计次
对射式红外传感器1.1 接线图VCC GND分别接电源的正负极DO数字输出端,随意选择一个GPIO口1.2 硬件原理当挡光片或者编码盘在对射式红外传感器中间经过时,DO就会输出电平变化信号,电平跳变信号触发STM32 PB14号口中断,在中断函数中执…...

【数据库概论】第九章 关系查询处理和查询优化
第九章 关系查询处理和查询优化 本章主要介绍关系数据库查询管理和查询优化,主要分为代数优化(又称逻辑优化)和物理优化(也称非代数优化)。 9.1 关系型数据库系统的查询处理 查询处理是关系型数据库管理系统执行查询…...
 my cloud test bed (by quqi99))
(WIP) my cloud test bed (by quqi99)
作者:张华 发表于:2023-03-10 版权声明:可以任意转载,转载时请务必以超链接形式标明文章原始出处和作者信息及本版权声明 问题 想创建一个local local test bed, 用来方便做各种云实验,如openstack, k8s, ovn, lxd等…...

git | git 2023 详细版
文章目录一、Git命令1.2 设计用户签名1.3 初始化本地库1.4 查看本地库状态1.5 添加至暂存区1.6 从暂存区删除1.7 将暂存区的文件提交到本地库1.8 查看版本信息二、Git分支2.1 查看分支2.2 创建分支2.3 切换分支2.4 合并分支三、GitHub3.1 代码克隆clone3.2 给库取别名3.3 推送本…...

camunda流程引擎基本使用(笔记)
文章目录一、camunda基础1.1 安装与部署流程引擎1.2 流程引擎结构1.3 流程引擎的基本使用1.3.1 创建一个BPMN Diagram1.3.2 实现一个外部工作者1.3.3 部署流程1.3.4 创建一个流程实例并消费1.3.5 向流程中添加用户任务1.3.6 添加网关1.3.7 业务规则二、Java 集成流程引擎2.1 为…...

JS之数据结构与算法
前言数据结构是计算机存储、组织数据的方式,算法是系统描述解决问题的策略。了解基本的数据结构和算法可以提高代码的性能和质量。也是程序猿进阶的一个重要技能。手撸代码实现栈,队列,链表,字典,二叉树,动态规划和贪心算法1.数据结构篇1.1 栈栈的特点:先进后出clas…...
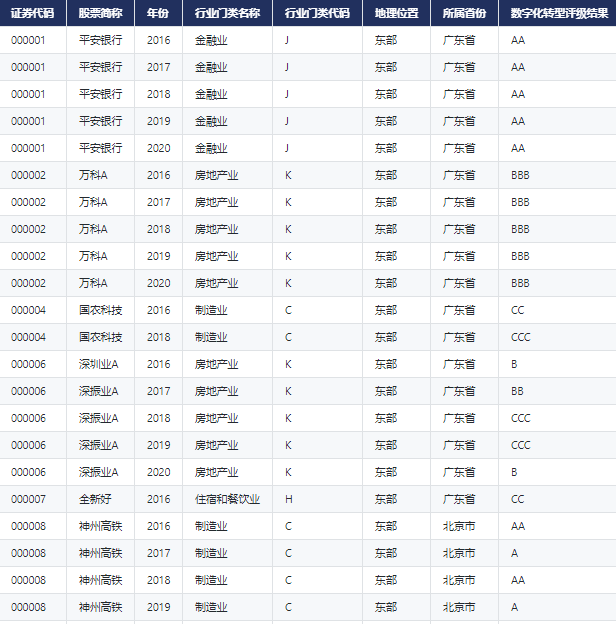
CnOpenData·A股上市企业数字化转型指数数据
一、数据简介 企业数字化转型是近年来中国社会各界重点关注的领域,但基础数据的不完善在很大程度上制约了相关科学研究的开展。构建合理、科学的数字化转型指标体系有利于学者定量地研究企业数字化的相关问题,也有利于衡量企业的数字化水平。广东金融学院…...

VMware16pro虚拟机安装全过程
很多时候需要用到Linux系统,简单的一种方式可以是:Windows系统运行Linux(Windows Subsystem for Linux)不过有些时候还是需要虚拟机来运行Linux,也更方便点,比如在做嵌入式系统的烧录等操作都需要Linux环境…...
)
阿里云第六代云服务器最新价格表(计算型c6、通用型g6和内存型r6)
目前阿里云第六代云服务器有计算型c6、通用型g6和内存型r6实例。计算型c6实例有2核4G、4核8G、8核16G配置可选,主要适用于网站应用、批量计算、视频编码等场景。通用型g6实例有2核8G、4核16G、8核32G配置可选,适用于各种类型的企业级应用,网站…...

微小目标识别研究(2)——基于K近邻的白酒杂质检测算法实现
文章目录实现思路配置opencv位置剪裁实现代码自适应中值滤波实现代码动态范围增强实现代码形态学处理实现代码图片预处理效果计算帧差连续帧帧差法原理和实现代码实现代码K近邻实现基本介绍实现代码这部分是手动实现的,并没有直接调用相关的库完整的代码——调用ope…...

2022-06-14至2022-08-11 关于复现MKP算法的总结与反思
Prerequisite 自2022年6月14日至2022年8月11日的时间内,我致力于完成A Hybrid Approach for the 0–1 Multidimensional Knapsack problem 论文的复现工作,此次是我第一次进行组合优化方向的学习工作,下面介绍该工作内容发展过程以及该工作结…...

IBMMQ教程二(window版安装)
下载下载地址:https://public.dhe.ibm.com/ibmdl/export/pub/software/websphere/messaging/mqadv/我这里选择的是9.1.0.0版本安装将下载完成的压缩包解压双击Setup.exe直接运行点击软件需求查看系统配置是否满足,右边绿色的对号说明满足需求,…...

Java | HashSet 语法
HashSet 基于 HashMap 来实现的,是一个不允许有重复元素的集合。 HashSet 允许有 null 值。 HashSet 是无序的,即不会记录插入的顺序。 HashSet 不是线程安全的, 如果多个线程尝试同时修改 HashSet,则最终结果是不确定的。 您必须…...
)
js学习4(运算符)
### 1.算数运算符: 、-、*、\、%(取余)、**(幂方) ## 优先级 同数学课程,可以加括号 ### 2.自增和自减 、--(即数值变量加一或减一) ### 3.赋值运算符 、、-、*、/、... ### 4.比较运…...

2月更新 | Visual Studio Code Python
我们很高兴地宣布,2023年2月版 Visual Studio Code Python 和 Jupyter 扩展现已推出!此版本包括以下改进:从激活的终端启动 VS Code 时的自动选择环境 使用命令 Python: Create Environmen 时可选择需求文件或可选依赖项 预发布:改…...

C++回顾(十八)—— 文件操作
18.1 I/O流概念和流类库结构 1 概念 程序的输入指的是从输入文件将数据传送给程序,程序的输出指的是从程序将数据传送给输出文件。 C输入输出包含以下三个方面的内容: (1)对系统指定的标准设备的输入和输出。即从键盘输入数据&am…...
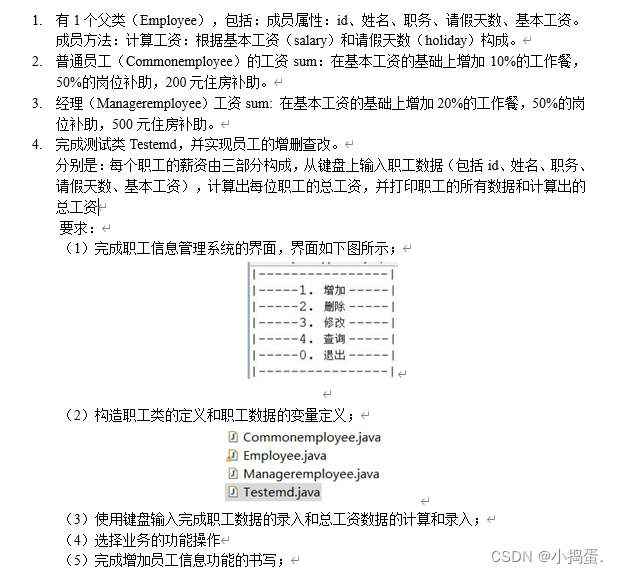
以java编写员工管理系统(测试过 无问题)
一、系统结果的部分展示 二、题目以及相关要求 三、组成 1.该系统由 Employee 类 、commonEmployee类、Testemd类和managerEmployee类组成 2.Employee实现的代码 public class Employee {private String id;private String name;private String job;private int holiday…...
单例模式之懒汉式
在上篇文章中,我们讲了单例模式中的饿汉式,今天接着来讲懒汉式。 1.懒汉式单例模式的实现 public class LazySingleton {private static LazySingleton instance null;// 让构造函数为private,这样该类就不会被实例化private LazySingleto…...
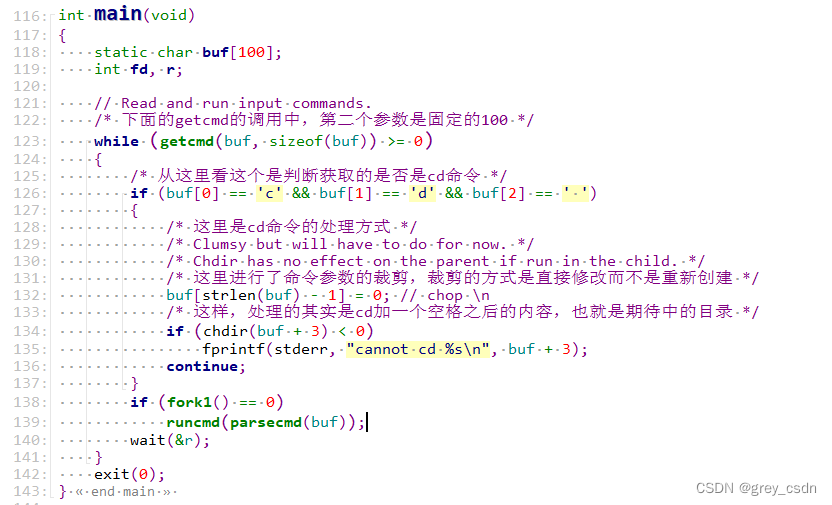
1638_chdir函数的功能
全部学习汇总:GreyZhang/g_unix: some basic learning about unix operating system. (github.com) 今天看一个半生不熟的小函数,chdir。说半生不熟,是因为这个接口一看就知道是什么功能。然而,这个接口如何用可真就没啥想法了。 …...

使用CEF 获得某头条请求,并生成本地文件的方法
目录 一、获得网站请求响应信息 1、响应过滤 2、匹配过滤URL的函数 3、获得请求响应后的处理...

城市级智慧停车平台建设思路:如何整合多个停车项目的数据
引言随着城市化进程的加速和机动车保有量的持续攀升,"停车难、停车乱"已经成为困扰各大城市的普遍性问题。根据公安部统计数据,截至2025年底,全国机动车保有量已突破4.5亿辆,而城市停车位缺口预计超过8000万个。与此同时…...

AI工具导航与实战指南:从分类体系到选型策略
1. 项目概述:AI-Infinity,一个前沿AI工具的探索者指南如果你和我一样,对AI领域层出不穷的新工具感到既兴奋又头疼,那么这个项目绝对值得你花时间深入了解。AI-Infinity,这个由开发者meetpateltech维护的GitHub仓库&…...

Arm A64指令集SIMD与浮点寄存器架构解析
1. A64指令集的SIMD与浮点寄存器架构解析在Armv8-A架构中,A64指令集引入了强大的向量处理能力,通过32个128位宽的V寄存器(V0-V31)实现了高效的SIMD(单指令多数据)和浮点运算支持。这套寄存器文件的设计巧妙…...
)
Google Maps路线优化突遭瓶颈?Gemini大模型如何将平均行程时间压缩23.6%(2024Q2实测数据)
更多请点击: https://intelliparadigm.com 第一章:Google Maps路线优化突遭瓶颈?Gemini大模型如何将平均行程时间压缩23.6%(2024Q2实测数据) 当Google Maps在高并发城市网格中遭遇动态交通建模失准、实时事件响应延迟…...

终极指南:如何解决FanControl风扇突然“隐身“问题 - 快速恢复硬件识别的完整教程
终极指南:如何解决FanControl风扇突然"隐身"问题 - 快速恢复硬件识别的完整教程 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: http…...

从零开始:sherpa-onnx跨平台语音识别终极指南
从零开始:sherpa-onnx跨平台语音识别终极指南 【免费下载链接】sherpa-onnx Speech-to-text, text-to-speech, speaker diarization, speech enhancement, source separation, and VAD using next-gen Kaldi with onnxruntime without Internet connection. Support…...

Windows系统mqad.dll文件丢失无法启动程序解决
在使用电脑系统时经常会出现丢失找不到某些文件的情况,由于很多常用软件都是采用 Microsoft Visual Studio 编写的,所以这类软件的运行需要依赖微软Visual C运行库,比如像 QQ、迅雷、Adobe 软件等等,如果没有安装VC运行库或者安装…...

Linux下Cursor IDE智能安装器:企业级Bash脚本设计与实践
1. 项目概述:一个为Linux而生的Cursor IDE智能安装器如果你是一名在Linux环境下工作的开发者,并且对Cursor这款集成了AI辅助编程能力的现代IDE感兴趣,那么你很可能已经遇到过那个经典难题:如何优雅地在Linux上安装它?官…...

25GbE以太网:数据中心服务器接入的技术革命与演进逻辑
1. 项目概述:25GbE的诞生与数据中心变革如果你在2014年前后关注数据中心网络,可能会觉得以太网速率的发展路径有点“拧巴”。我们刚刚习惯了从1G到10G的十倍跨越,紧接着迎来的却是40G和100G。对于服务器接入来说,40G(4…...

OpenOCD实战:从源码编译到JTAG调试RISC-V平台
1. OpenOCD与RISC-V调试基础 第一次接触OpenOCD调试RISC-V芯片时,我对着开发板上的JTAG接口发了半天呆。作为嵌入式开发者,我们都经历过这种从零搭建调试环境的阵痛期。OpenOCD就像一位硬件调试的瑞士军刀,它能通过JTAG接口与各种处理器架构对…...