机器人运动学笔记
一、建模
参考资料:https://zhuanlan.zhihu.com/p/137960186
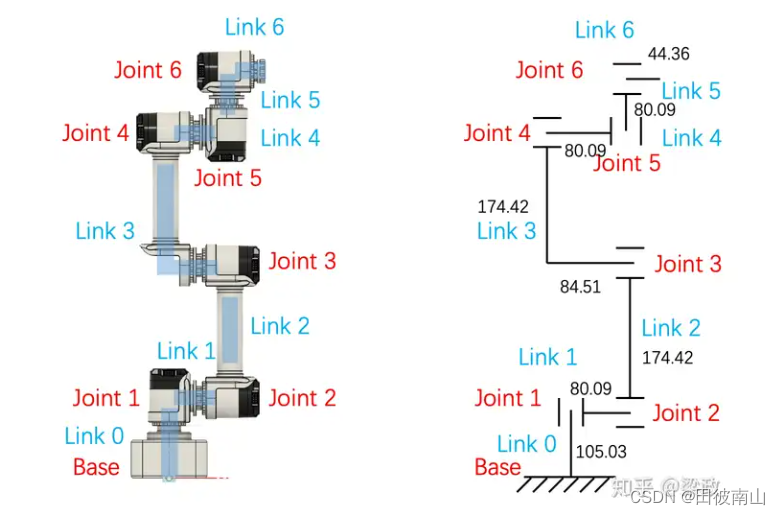
1、三维模型和连杆、关节定义
2、设置z轴
- SDH和MDH会不一样,主要的区别在于SDH中坐标系在连杆末端,MDH中坐标系在连杆首端。虽然这里只是给出z轴,但是由于后面原点位置不同,所以二者z轴也不同。

2、设置原点和x轴
| 方法 | SDH | MDH |
|---|---|---|
| 原点 | i和i-1的交线是i原点,如果不想交用公垂线与i交点 | i和i+1的交线是i原点,如果不想交用公垂线与i交点 |
| x轴 | 指向i-1 | 指向i+1原点 |
| 添加 | 0坐标系 | 6坐标系 |
| y轴 | 右手定则 | 右手定则 |
- 关于原点这块我的理解和资料上不同,不知道谁写错了


3、确定dh参数
- SDH和MDH都是由前一坐标系移动到下一坐标系,写i行就是{i-1}到{i}
- 所有角度符合右手螺旋定则的是正方向
- theta是绕z轴转使得x轴重合的角度,d是沿着z轴运动使得x轴重合的距离
(1)SDH
- θ → d → α → a \theta\rightarrow d\rightarrow\alpha\rightarrow a θ→d→α→a

(2)MDH
- α → a → θ → d \alpha\rightarrow a\rightarrow\theta\rightarrow d α→a→θ→d

(3)几何参数

二、正运动学
- 资料:https://blog.csdn.net/subtitle_/article/details/130982929
1、齐次变换矩阵
-
可以以此计算所有的T,左上的3×3是三个轴,右侧是三维向量是原点坐标
-
标准DH的齐次变换矩阵

-
改进dh法的齐次变换矩阵

三、逆运动学
- 资料: https://blog.csdn.net/wh_STUDY/article/details/126862627
- 常用的方法有几何解法、代数解法和数值解法
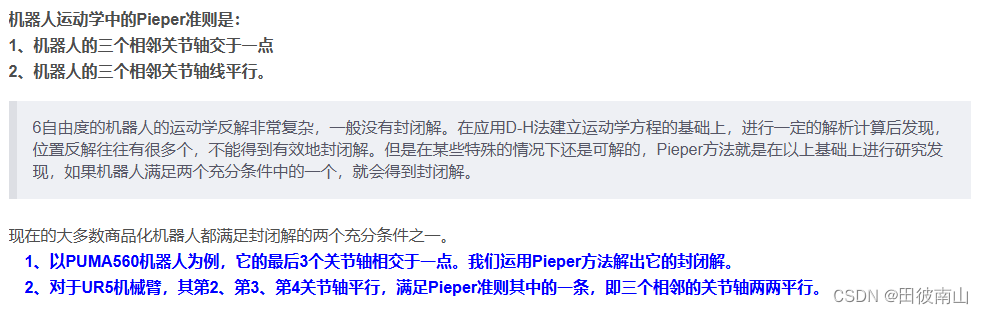
1、pieper准则
- 如果一个机械臂的结构满足pieper准则,则有封闭解,即可以获得用公式表达的解
2、几何解
- 几何解直接看参考连接中举得案例,一般很少使用
3、代数解
- 参考资料:工业用六轴机械臂的建模与仿真_卢锐
3.1 改进dh建模


3.2 求代数逆解
- 利用的就是齐次变换矩阵的相乘(一般是在左侧的上下标)
A 6 0 = A 1 0 A 2 1 A 3 2 A 4 3 A 5 4 A 6 5 A^0_6 = A^0_1A^1_2A^2_3A^3_4A^4_5A^5_6 A60=A10A21A32A43A54A65 - 求 θ 1 \theta_1 θ1
A 1 0 − 1 A 6 0 = A 2 1 A 3 2 A 4 3 A 5 4 A 6 5 {A^0_1}^{-1}A^0_6 = A^1_2A^2_3A^3_4A^4_5A^5_6 A10−1A60=A21A32A43A54A65
令两侧的(1,4)和(2,4)分别相等,依次求解其他角度,最终会有8组解
相关文章:
机器人运动学笔记
一、建模 参考资料:https://zhuanlan.zhihu.com/p/137960186 1、三维模型和连杆、关节定义 2、设置z轴 SDH和MDH会不一样,主要的区别在于SDH中坐标系在连杆末端,MDH中坐标系在连杆首端。虽然这里只是给出z轴,但是由于后面原点位…...
webshell三巨头 综合分析(蚁剑,冰蝎,哥斯拉)
考点: 蚁剑,冰蝎,哥斯拉流量解密 存在3个shell 过滤器 http.request.full_uri contains "shell1.php" or http.response_for.uri contains "shell1.php" POST请求存在明文传输 ant 一般蚁剑执行命令 用垃圾字符在最开头填充 去掉垃圾字符直到可以正常bas…...
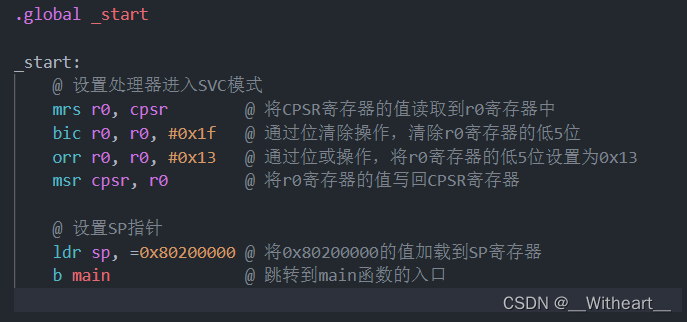
stm32MP135裸机编程:启动流程分析
0 参考资料 轻松使用STM32MP13x - 如MCU般在cortex A核上裸跑应用程序.pdf STM32MP135AD数据手册.pdf1 stm32MP135裸机启动流程分析 1.1 启动方式 stm32MP135支持8种启动方式: 注: UART和USB启动并不是指通过UART/USB加载程序,而是通过UA…...
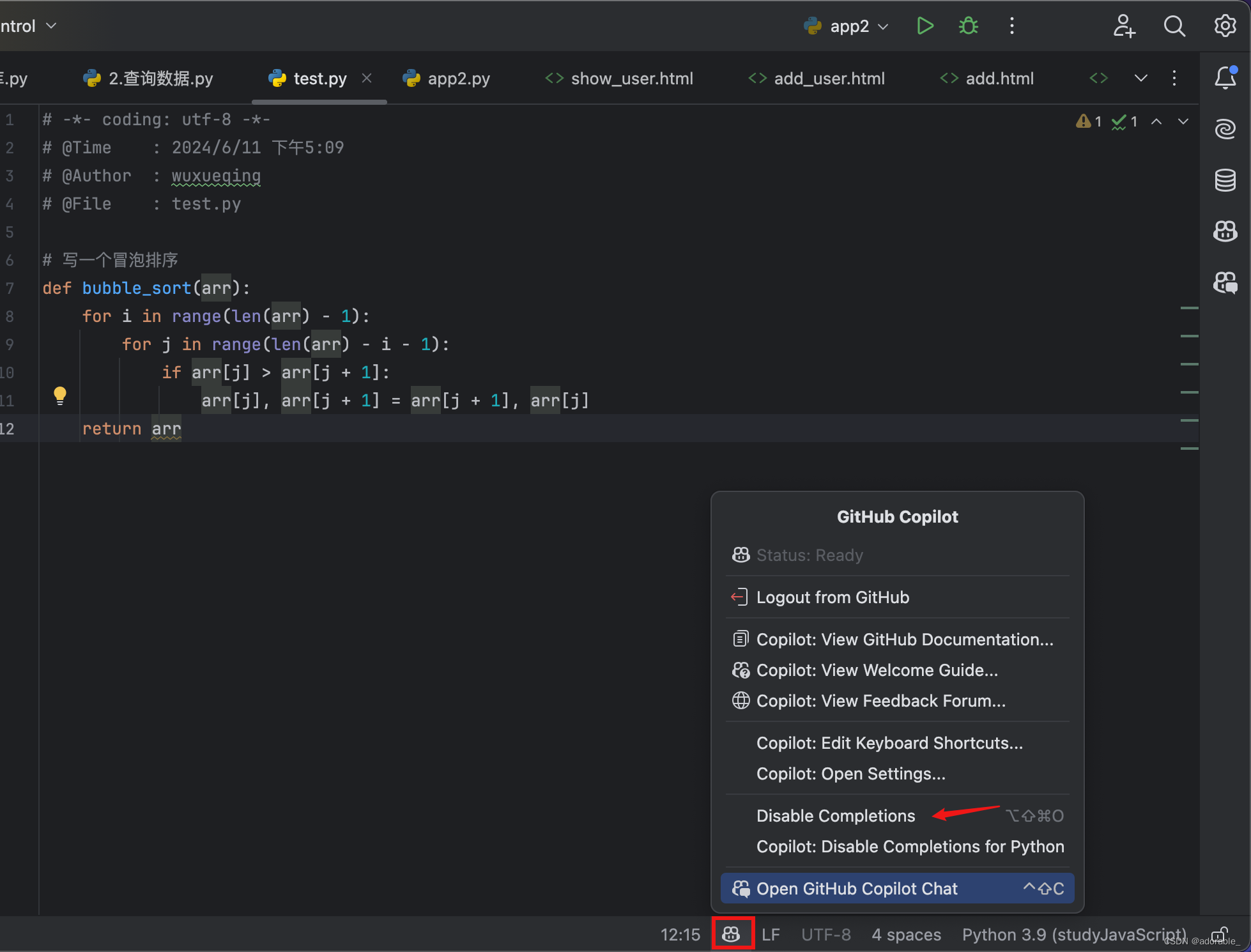
在Pycharm使用Github Copilot
文章目录 1.GitHub Copilot 是什么2.注册GitHub Copilot3.官方使用文档4.安装 GitHub Copilot插件5.在Pycharm中使用6.相关功能键7.启用或禁用 GitHub Copilot 1.GitHub Copilot 是什么 GitHub Copilot 是一款 AI 编码助手,可帮助你更快、更省力地编写代码ÿ…...

Docker镜像构建:Ubuntu18.04+python3.10
1、编写 Dockerfile # 使用Ubuntu 18.04作为基础镜像 FROM ubuntu:18.04RUN apt-get update && apt-get install -y \build-essential \curl \zlib1g-dev \libssl-dev \&& rm -rf /var/lib/apt/lists/*ENV PYTHON_VERSION3.10.8RUN curl -O https://www.pytho…...
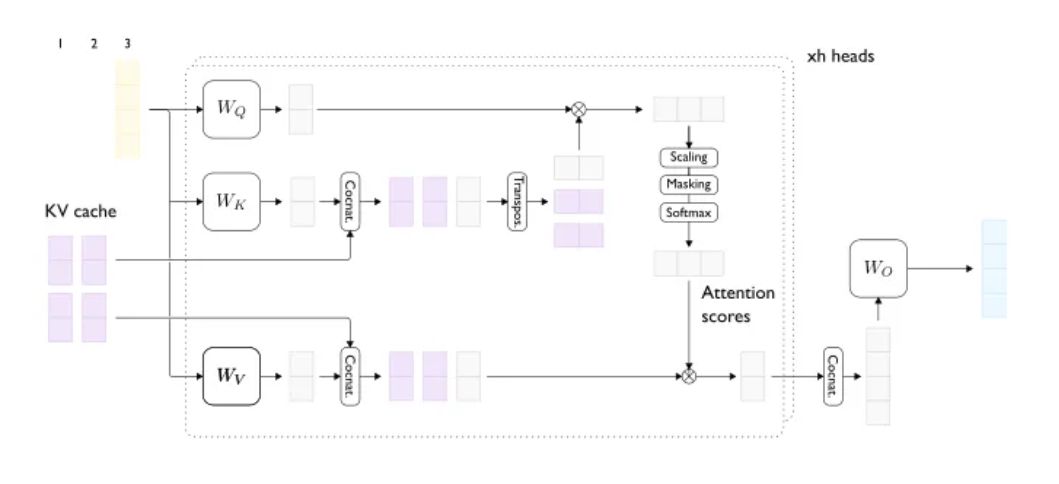
如何进行LLM大模型推理优化
解密LLM大模型推理优化本质 一、LLM推理的本质以及考量点 LLM推理聚焦Transformer架构的Decoder以生成文本。过程分两步:首先,模型初始化并加载输入文本;接着,进入解码阶段,模型自回归地生成文本,直至满足…...

QLoRA:高效的LLMs微调方法,48G内存可调65B 模型
文章:https://arxiv.org/pdf/2305.14314.pdf 代码:https://github.com/artidoro/qlora概括 QLORA是一种有效的微调方法,它减少了内存使用,足以在单个48GB GPU上微调65B参数模型,同时保留完整的16位微调任务性能。QLOR…...
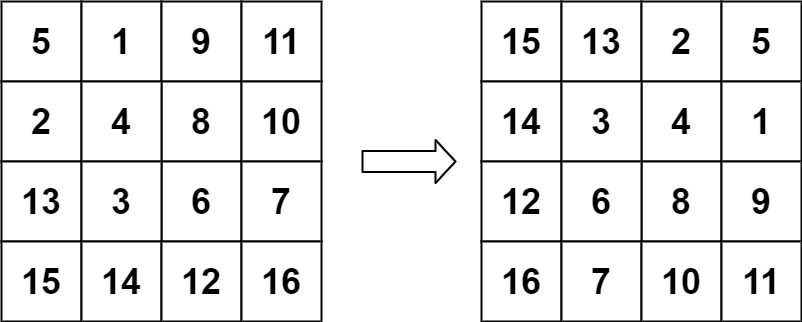
力扣48. 旋转图像
给定一个 n n 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。你必须在原地旋转图像,这意味着你需要直接修改输入的二维矩阵。请不要使用另一个矩阵来旋转图像。 示例 1: 输入:matrix [[1,2,3],[4,5,6],[7,8,9]] 输出…...
【踩坑日记】I.MX6ULL裸机启动时由于编译的程序链接地址不对造成的程序没正确运行
1 现象 程序完全正确,但是由于程序链接的位置不对,导致程序没有正常运行。 2 寻找原因 对生成的bin文件进行反汇编: arm-linux-gnueabihf-objdump -D -m arm ledc.elf > ledc.dis查看生成的反汇编文件 发现在在链接的开始地址处&…...

【计算机网络仿真实验-实验2.6】带交换机的RIP路由协议
实验2.6 带交换机的rip路由协议 1. 实验拓扑图 2. 实验前查看是否能ping通 不能 3. 三层交换机配置 switch# configure terminal switch(config)# hostname s5750 !将交换机更名为S5750 S5750# configure terminal S5750(config)#vlan 10 S5750(config-vlan)#exit S57…...

Apache网页优化
一、网页压缩与缓存 注意文章中的http为源代码包安装,配置时指定了mod_deflate、mod_expires、mod_rewrite模块。所有的模块是否生效可以通过在浏览器中找到"开发工具"中的网络选项卡中的信息进行验证,里面有请求报文和响应报文的部分信息。 通…...

OpenCV形态学
什么事形态学处理 基于图像形态进行处理的一些基本方法; 这些处理方法基本是对二进制图像进行处理; 卷积核决定着图像出来后的效果。 一 图像二值化 什么是二值化 将图像的每个像素变成两种值,如0,255. 全局二值化。 局部二值化。 thres…...
首途第三十三套清新简约卡片风格蓝紫渐变色短视频模板 | 苹果CMSV10主题
下载地址:首途第三十三套清新简约卡片风格蓝紫渐变色短视频模板 | 苹果CMSV10主题 首途第三十三套清新简约卡片风格蓝紫渐变色短视频模板 | 苹果CMSV10主题 我们的简约风格,以纯洁的白色和深邃的紫色为主色调,为您提供了一种清新、时尚的浏览…...

永磁同步直线电机(PMLSM)控制与仿真2-永磁同步直线电机数学模型搭建
文章目录 1、公式总结2、电压方程模型3、运动方程4、推力方程5、转化关系 写在前面:原本为一篇文章写完了永磁同步直线电机数学模型介绍,永磁同步直线电机数学模型搭建,以及永磁同步直线电机三环参数整定及三环仿真模型搭建,但因为…...
MPLS VPN一
R1为客户,现在进行一些基本配置,来确保可以通路由 先启动OSPF跑通 在R3上 等一会 现在启动MPLS 对R3 对R4 然后在R2上 再把接口划到空间里面 原来的IP在公网里面,被清除了 然后再配置接口 查看 对R1(相当于客户) …...

39python数据分析numpy基础之h5py读写数组数据到h5文件
1 python数据分析numpy基础之h5py读写数组数据到h5文件 HDF5(分层数据格式文件)是Hierarchical Data Format Version 5的缩写,是一种用于存储和管理大数据的文件格式。经历了20多年的发展,HDF格式的最新版本是HDF5,它包含了数据模型…...
2024全新仿麻豆视频苹果cms源码v10影视模板
下载地址:2024全新仿麻豆视频苹果cms源码v10影视模板 高端大气的设计,适合做电影、连续剧、综艺、动漫、微电影、纪录片、海外剧等视频网站...
这世上又多了一只爬虫(spiderflow)
让我们一起默念: 爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫爬虫 接着大声喊出来: 一!只!爬!虫!呀!爬!呀!爬…...
SpringMVC框架学习笔记(七):处理 json 和 HttpMessageConverter 以及文件的下载和上传
1 处理 JSON-ResponseBody 说明: 项目开发中,我们往往需要服务器返回的数据格式是按照 json 来返回的 下面通过一个案例来演示SpringMVC 是如何处理的 (1) 在web/WEB-INF/lib 目录下引入处理 json 需要的 jar 包,注意 spring5.x…...
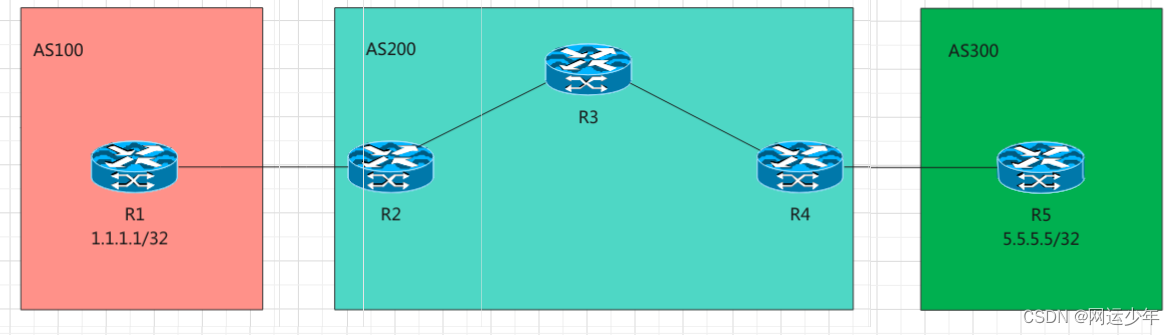
八、BGP
目录 一、为何需要BGP? 二、BGP 2.1、BGP邻居 2.2、BGP报文 2.3、BGP路由 2.4、BGP通告遵循原则 2.5、BGP实验 第一步:建立邻居 第二步:引入路由 BGP路由黑洞 路由黑洞解决方案 1、IBGP全互联 2、路由引入 3、MPLS 多协…...

查询不准?响应延迟?Perplexity阅读推荐失效全归因,一线SRE团队72小时压测实录
更多请点击: https://intelliparadigm.com 第一章:查询不准?响应延迟?Perplexity阅读推荐失效全归因,一线SRE团队72小时压测实录 问题爆发现场还原 凌晨2:17,Perplexity阅读推荐API的P99延迟突增至8.4s&a…...

HPM6750 LVGL性能优化:片内SRAM帧缓冲实战解析
1. 项目概述:当LVGL遇上HPM6750的片内“新大陆”最近在嵌入式图形界面开发的圈子里,一个关于HPM6750的话题热度不低。起因是有开发者发现,在基于HPM6750这款高性能RISC-V MCU进行LVGL(Light and Versatile Graphics Library&#…...

Fast-GitHub:智能网络优化架构解析与分布式加速方案
Fast-GitHub:智能网络优化架构解析与分布式加速方案 【免费下载链接】Fast-GitHub 国内Github下载很慢,用上了这个插件后,下载速度嗖嗖嗖的~! 项目地址: https://gitcode.com/gh_mirrors/fa/Fast-GitHub 在国内开发者面临G…...

MC/DC覆盖率:从原理到实战,破解100%覆盖率的迷思与挑战
1. 项目概述:当“完美”成为负担在软件测试领域,尤其是对安全关键系统(比如航空航天、汽车电子、医疗设备)的验证,我们常常听到一个词:100%覆盖率。这听起来像是一个终极目标,一个完美的终点。但…...

AMD Ryzen SMU调试工具完全指南:免费开源硬件调优神器入门教程
AMD Ryzen SMU调试工具完全指南:免费开源硬件调优神器入门教程 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: ht…...

量子计算中数据驱动的哈密顿修正方法研究
1. 量子门控中的哈密顿修正挑战在量子计算领域,超导transmon比特因其相对较长的相干时间和可扩展性,成为当前最有前景的量子处理器实现方案之一。然而,实际硬件中存在的器件间差异和串扰效应,使得基于理论模型的脉冲设计与真实硬件…...

终极指南:8步搭建你的私人游戏串流服务器Sunshine
终极指南:8步搭建你的私人游戏串流服务器Sunshine 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 想要在任何设备上流畅玩PC游戏吗?Sunshine是一款免费开源…...

Windows远程桌面终极解锁指南:如何免费开启多用户并发连接
Windows远程桌面终极解锁指南:如何免费开启多用户并发连接 【免费下载链接】rdpwrap RDP Wrapper Library 项目地址: https://gitcode.com/gh_mirrors/rd/rdpwrap 还在为Windows家庭版无法使用远程桌面而烦恼吗?RDP Wrapper Library这款开源工具能…...

Grounding DINO实战评测:对比GLIP、OV-DETR,在COCO和LVIS数据集上到底强在哪?
Grounding DINO技术解析:多模态开放集检测的突破与实践 在计算机视觉与自然语言处理的交叉领域,开放集目标检测正经历着前所未有的技术革新。传统检测模型受限于预定义类别集的桎梏,而新一代多模态大模型通过融合视觉与语言信号,实…...

GLAD:热晕效应
概述激光在大气中传输时部分能量被空气中的分子和气溶胶吸收。被吸收的热量将空气加热,导致气压上升,空气膨胀,空气密度降低,折射率下降,形成一个负透镜,使激光束发散。当存在侧向风时,下风区空…...