ubuntu18.04 配置 mid360并测试fast_lio
1.在买到Mid360之后,我们可以看到mid360延伸出来了三组线。
第一组线是电源线,包含了红色线正极,和黑色线负极。一般可以用来接9-27v的电源,推荐接12v的电源转换器,或者接14.4v的电源转换器。
第二组线是信号线,共5根线,包含了2根pps线,秒脉冲;包含了2根GPS信号输入和GPS信号输出线,和一根地线。
第三组线是数据线,是一个网线,直接连接笔记本就可以了
2.IP配置
2.1 先把mid360的电源线接上,通上电;把数据线也就是网线插入到笔记本的网口上。
首先点屏幕右上角的向下箭头,找到【以太网连接】,点开后找到【有线设置】,在PCI以太网选项中,点击【齿轮】按钮,点ipv4,地址:192.168.1.50 子网掩码 255.255.255.0 网管 192.168.1.254
然后就可以用 Livox VIewer2 来显示了。
3. livox mid360配置指南
cd ~
# Download Livox Viewer 2
wget https://terra-1-g.djicdn.com/65c028cd298f4669a7f0e40e50ba1131/Mid360/LivoxViewer2%20for%20Ubuntu%20v2.3.0.zip
# Unzip
unzip "LivoxViewer2 for Ubuntu v2.3.0.zip"
# Go to Livox
cd "LivoxViewer2 for Ubuntu v2.3.0"
# Grant permission
chmod +x LivoxViewer2.sh
# Run Livox Viewer 2
./LivoxViewer2.sh这时候,就直接可以看到mid360所采集的点云了。
4. livox sdk2 的配置
(1) 修改mid360_config.json中的IP地址
首先进入到livox_sdk2/Samples/Livox_lidar_quick_start文件夹中,打开mid360_config.json,把host_ip设置为:192.168.1.50 和之前设置在IPV4中的网址是一样的。
(2)配置livox_sdk2
# Install cmake
sudo apt install cmake -y
# Go to Home
cd ~
# Download Livox SDK2
git clone https://github.com/Livox-SDK/Livox-SDK2.git
# Go to the SDK2 package
cd Livox-SDK2
# Create build folder
mkdir build
cd build
# Compile
cmake .. && make -j
# Install SDK2 in system
sudo make install
# Go to demo1
cd samples/livox_lidar_quick_start
# WARNING:
# Remember to modify the mid360_config.json with your PC IP 192.168.1.50(3)运行demo
# Run demo
./livox_lidar_quick_start ../../../samples/livox_lidar_quick_start/mid360_config.json就可以看到mid360所发出的消息。
5. Livox Ros配置
(1)配置livox ros
# Download the Livox ROS Driver 2 Package to ws_livox_src
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
# Update ros dependencies
rosdep install --from-paths src --ignore-src -r -y
# Build the package
source /opt/ros/noetic/setup.sh
# Go to livox
cd livox_ros_driver2/
./build.sh ROS1
# Source workspace
echo "source ws_livox/devel/setup.sh" >> ~/.bashrc
source ~/.bashrc
# Warning:
# Remember to modify the mid360_config.json with your PC IP 192.168.1.50
# and your lidar IP 192.168.1.1XX (xx is the last two digits of the SN code)(2).修改IP地址
1)首先找到mid360_config.json,在src/Livox_ros_driver2/config文件夹中,host_net_info的子项cmd_data_ip, push_msg_ip, point_data_ip,imu_data_ip这四个都改成192.168.1.50
2)然后把lidar_configs子项 ip 改为192.168.1.1xx,其中xx为 mid360上的SN码后两位。
(3).运行
roslaunch livox_ros_driver2 rviz_MID360.launch6. fast-lio安装指南
(1) 安装eigen3
#安装eigen3
sudo apt install libeigen3-dev
#查看版本
$ pkg-config --modversion eigen3(2)安装pcl
#安装PCL
sudo apt install libpcl-dev
#查看版本
apt-cache show libpcl-dev
#对照如下
#Ubuntu20.04 ——> 1.10.0
#Ubuntu18.04 ——> 1.8.1
#Ubuntu16.04 ——> 1.7.2(3)安装sophus
# 安装非模版类Sophus
git clone https://github.com/strasdat/Sophus.git
cd Sophus
git checkout a621ff #版本回溯
mkdir build && cd build && cmake .. && sudo make install报错:
***/sophus/so2.cpp:32:26: error: lvalue required as left operand of assignmentunit_complex_.real() = 1.;^~
***/sophus/so2.cpp:33:26: error: lvalue required as left operand of assignmentunit_complex_.imag() = 0.;
解决:打开so2.cpp修改构造函数:
//unit_complex_.real() = 1.;
//unit_complex_.imag() = 0.;
unit_complex_.real(1.);
unit_complex_.imag(0.);安装结果如下:
-- Install configuration: "Release"
-- Up-to-date: /usr/local/include/sophus
-- Installing: /usr/local/include/sophus/se3.h
-- Installing: /usr/local/include/sophus/scso3.h
-- Installing: /usr/local/include/sophus/se2.h
-- Installing: /usr/local/include/sophus/so2.h
-- Installing: /usr/local/include/sophus/sim3.h
-- Installing: /usr/local/include/sophus/so3.h
-- Installing: /usr/local/lib/libSophus.so(4)FAST_LIO编译
#首先创建一个ROS1的工作空间,在工作空间下的src中运行cd srcgit clone https://github.com/zlwang7/S-FAST_LIO.git --recursive(5)修改FAST_LIO代码
| 原因:FAST_LIO默认支持livox_ros_driver但是我们用的是livox_ros_driver2 |
|---|
1)修改FAST_LIO的CMakelists.txt
添加:
set(Sophus_LIBRARIES "/usr/local/lib/libSophus.so")修改:
find_package(catkin REQUIRED COMPONENTSgeometry_msgsnav_msgssensor_msgsroscpprospystd_msgspcl_rostflivox_ros_driver # <-修改这里message_generationeigen_conversions
)修改后:
find_package(catkin REQUIRED COMPONENTSgeometry_msgsnav_msgssensor_msgsroscpprospystd_msgspcl_rostflivox_ros_driver2 # <-修改这里message_generationeigen_conversions
)2)修改FAST_LIO的package.xml
修改前:
<build_depend>livox_ros_driver</build_depend><run_depend>livox_ros_driver</run_depend>修改后:
<build_depend>livox_ros_driver2</build_depend><run_depend>livox_ros_driver2</run_depend>3)修改FAST_LIO的头文件引用
| 分别打开FAST_LIO/src/preprocess.h 、FAST_LIO/src/laserMapping.cpp |
|---|

修改前:
#include <livox_ros_driver/CustomMsg.h>
修改后:
#include <livox_ros_driver2/CustomMsg.h>4)修改FAST_LIO的命名空间
分别打开FAST_LIO/src/preprocess.h 、FAST_LIO/src/preprocess.cpp 、FAST_LIO/src/laserMapping.cpp、FAST_LIO/src/laserMapping_re.cpp 中的命名空间,有多处需要修改
修改前:
| livox_ros_driver:: |
|---|
修改后:
| livox_ros_driver2:: |
|---|
(6)编译
catkin_make成功后:

| 如果还有编译错误提示,那就说明livox_ros_driver::没有全部改成livox_ros_driver2:: ,如下图: |
|---|

(7)运行demo
source devel/setup.bash
roslaunch livox_ros_driver2 msg_MID360.launch
#再开一个终端
source devel/setup.bash
roslaunch fast_lio mapping_mid360.launch参考文献:
https://zhuanlan.zhihu.com/p/668966629
相关文章:
ubuntu18.04 配置 mid360并测试fast_lio
1.在买到Mid360之后,我们可以看到mid360延伸出来了三组线。 第一组线是电源线,包含了红色线正极,和黑色线负极。一般可以用来接9-27v的电源,推荐接12v的电源转换器,或者接14.4v的电源转换器。 第二组线是信号线&#x…...

基于Java的诊所医院管理系统,springboot+html,MySQL数据库,用户+医生+管理员三种身份,完美运行,有一万一千字论文
演示视频 基本介绍 基于Java的诊所医院管理系统,springboothtml,MySQL数据库,用户医生管理员三种身份,完美运行,有一万一千字论文。 用户:个人信息管理、预约医生、查看病例、查看公告、充值、支付费用...…...

gvm 在ubuntu下安装
GVM (Go Version Manager) 是一个用于管理多个Go语言版本的工具。以下是使用GVM安装和切换Go版本的基本步骤和示例代码: 一键安装(如果网络没问题情况) bash < <(curl -s -S -L https://raw.githubusercontent.com/moovweb/gvm/master…...

ChatTTS开源项目推荐
开源热门项目推荐:ChatTTS 标题:对话式人工智能的未来——ChatTTS 随着开源程序的发展,越来越多的程序员开始关注并加入开源大模型的行列。对于开源行业和开源项目不同人有不同的关注点,但无论你是新手还是资深开发者,…...
java课设
项目简介:射击生存类小游戏 项目采用技术: 游戏引擎: Unity编程语言: Java图形处理: NVIDIA PhysX (物理引擎), HDRP (High Definition Render Pipeline)音效与音乐: FMOD, Wwise版本控制: Git 功能需求分析: 角色控制:玩家能够使用键盘和鼠标控制角色移动、瞄准…...

【持久层】PostgreSQL使用教程
详细教程点击PostgreSQL 12.2 手册,观看官网中文手册。 PostgreSQL 是一个功能强大且开源的对象关系数据库系统,以其高扩展性和符合标准的优势广受欢迎。随着大数据时代的到来,PostgreSQL 也在大数据处理方面展示了其强大能力。本文将介绍 P…...

OpenCV 4.10 发布
OpenCV 4.10 JPEG 解码速度提升 77%,实验性支持 Wayland、Win ARM64 根据 “OpenCV 中国团队” 介绍,从 4.10 开始 OpenCV 对 JPEG 图像的读取和解码有了 77% 的速度提升,超过了 scikit-image、imageio、pillow。 4.10 版本的一些亮点&…...

5、斐波那契数列、跳台阶
题目: 斐波那契数列 描述: 大家都知道斐波那契数列,现在要求输入一个整数n,请你输出斐波那契数列的第n项。 n<39 <?phpfunction Fibonacci($n) {if($n<0){$f1 0;}else if($n1||$n2){$f1 1;}else{$f1 1; $f2 1;whi…...
WPS相同字体但是部分文字样式不一样解决办法
如下图,在使用wps编辑文档的时候发现有些电脑的文字字体很奇怪,但是把鼠标移到这个文字的位置,发现它和其他正常文字的字体是一样的,都是仿宋_GB2312 正常电脑的文字如下图所示 打开C:\Windows找到Fonts这个文件夹 把仿宋_GB2312这…...
Scala运算符及流程控制
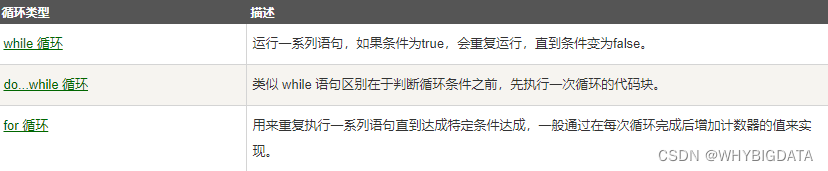
Scala运算符及流程控制 文章目录 Scala运算符及流程控制写在前面运算符算数运算符关系运算符赋值运算符逻辑运算符位运算符运算符本质 流程控制分支控制单分支双分支多分支 循环控制for循环while循环循环中断嵌套循环 写在前面 操作系统:Windows10JDK版本ÿ…...

Github 2024-06-10开源项目周报 Top15
根据Github Trendings的统计,本周(2024-06-10统计)共有15个项目上榜。根据开发语言中项目的数量,汇总情况如下: 开发语言项目数量Python项目8Jupyter Notebook项目2Go项目2C++项目1Shell项目1Lua项目1JavaScript项目1MDX项目1C项目1HTML项目1Python - 100天从新手到大师 创建…...
9. 文本三剑客之awk
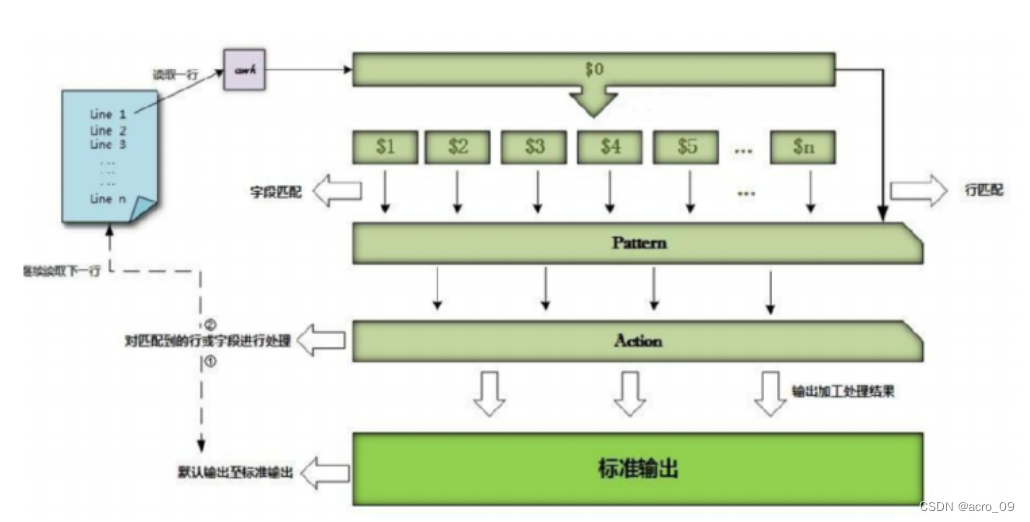
文章目录 9.1 什么是awk9.2 awk命令格式9.3 awk执行流程9.4 行与列9.4.1 取行9.4.2 取列 9.1 什么是awk 虽然sed编辑器是非常方便自动修改文本文件的工具,但其也有自身的限制。通常你需要一个用来处理文件中的数据的更高级工具,它能提供一个类编程环境来…...

在vscode中调试,命令行出现错误信息ModuleNotFoundError: No module named ‘imp‘
在vscode中调试,命令行出现错误信息ModuleNotFoundError: No module named ‘imp’ 报错原因 VSCode的python扩展会使用debugpy库实现调试功能。在涉及qt组件加载时,debugpy的qt_loaders.py会尝试加载imp库。而在python3.12及以后的版本中,…...
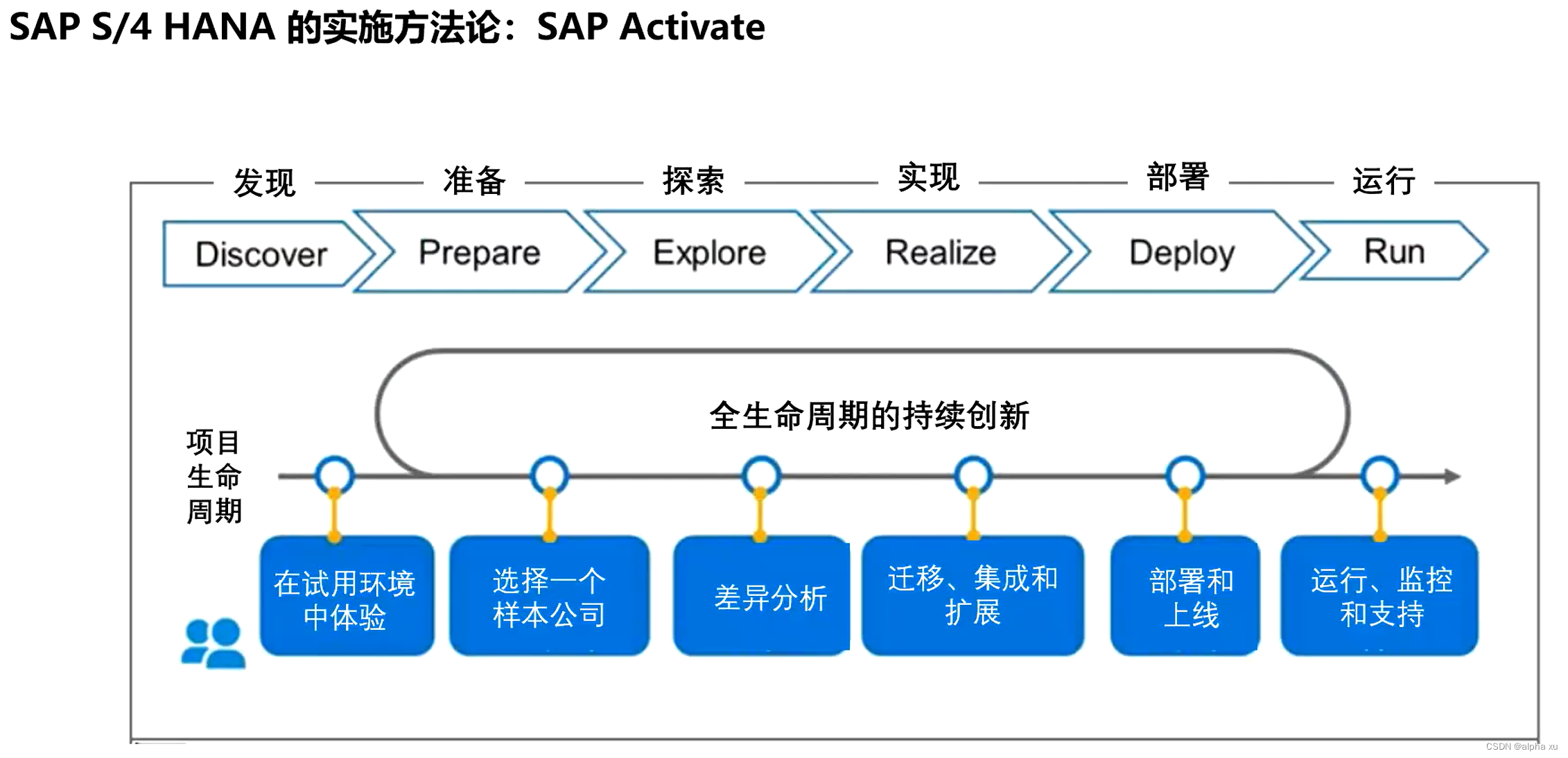
SAP实施方法论的变化
SAP 的实施方法论 ASAP,在SAP进入 S/4 HANA时,不知不觉改了意思。 原来叫Accelerate SAP,现在叫Activate SAP ,毕竟存量SAP太多,大部分用户并非象十多年前一样新实施SAP,而是在老的Sap R/3 ,MyS…...
phpstudy的安装dvwa
phpstudy安装dvwa 1. 下载phpstudy Windows版phpstudy下载 - 小皮面板(phpstudy) (xp.cn) 2. 搭建dvwa靶场 下载地址:https://github.com/ethicalhack3r/DVWA/archive/master.zip 将其放入www文件夹中 3. 修改配置文件 将\DVWA-master\config中config.inc.php…...

费曼的博士学位论文及下载
原始链接 PDF影印版下载 以前看《费曼物理学讲义》觉得最小作用原理部分讲得非常多、而且比较炫。现在知道原因了。 The principle of least action in quantum mechanics Richard Phillips Feynman(Princeton U. )May, 1942 74 pages Supervisor: John Archibald Wheeler…...

k8s学习--kubernetes服务自动伸缩之垂直伸缩(资源伸缩)VPA详细解释与安装
文章目录 前言VPA简介简单理解详细解释VPA的优缺点优点1.自动化资源管理2.资源优化3.性能和稳定性提升5.成本节约6.集成性和灵活性 缺点1.Pod 重启影响可用性2.与 HPA 冲突3.资源监控和推荐滞后:4.实现复杂度: 核心概念Resource Requests 和 Limits自动调…...

【OS】相关知识点收集
1 页面置换 页面置换算法是在计算机内存管理中用于决定哪些页面应该被替换出内存,以便为新的页面腾出空间的策略。以下是关于页面置换算法的详细回答,参考了多篇相关文章的信息。 1. 页面置换算法概述 页面置换算法主要应用于在存储体系当中ÿ…...
)
如何开发高效服务(C++ )
在 C 开发高效服务器时,常用的开发模式和设计模式能够帮助你构建高效、可扩展和可维护的服务器。以下是一些常见的模式和设计模式: 1. 并发和并行编程模型 1.1 Reactor 模式 Reactor 模式是一种事件驱动设计模式,广泛用于高性能服务器编程…...

STM32实现多级菜单界面显示
1、main函数中,while循环之前 MenuStruct menu[30] //定义多级菜单结构体数组{{0,0,0,1,show0}, //第一个元素表示索引号,第二个元素表示该按键按下后要返回的界面,第三个元素表示该按键按下后要切换的菜单条目界面,第四个元素…...

vibe-to-ui:让AI助手将你的“感觉”翻译成专业设计系统
1. 项目概述:当“感觉”成为设计语言如果你和我一样,是一个能写出复杂业务逻辑,但一碰到UI设计就头疼的开发者,那今天聊的这个工具,可能会彻底改变你的工作流。我们常常陷入一个困境:心里有一个模糊的“感觉…...

Cadence IC617虚拟机导入后,Calibre DRC报License错误的保姆级修复指南
Cadence IC617虚拟机导入后Calibre DRC报License错误的终极解决方案 当你兴冲冲地打开从同事那里拷贝的Cadence IC617虚拟机镜像,准备开始芯片设计工作时,突然跳出的Calibre DRC license错误提示就像一盆冷水浇下来。这种"拿来即用"的环境本应…...

5分钟快速上手:qmcdump免费解密QQ音乐文件的终极指南
5分钟快速上手:qmcdump免费解密QQ音乐文件的终极指南 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump 你是否…...

网络安全入门:2026年转行网络安全完整路径图
网络安全入门:2026 年转行网络安全完整路径图 导语:2026 年,网络安全人才缺口达 150 万,平均薪资较传统 IT 岗位高出 30%。但 70% 的转行者因路径不清晰而失败。本文详解 2026 年转行网络安全的完整路径:学习路线、证…...

终极网盘直链下载助手完整指南:免费解锁八大平台高速下载
终极网盘直链下载助手完整指南:免费解锁八大平台高速下载 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天…...

告别硬件依赖:用Virtual ZPL Printer构建完整的标签打印测试环境
告别硬件依赖:用Virtual ZPL Printer构建完整的标签打印测试环境 【免费下载链接】Virtual-ZPL-Printer An ethernet based virtual Zebra Label Printer that can be used to test applications that produce bar code labels. 项目地址: https://gitcode.com/gh…...

Python自动化交易:Kalshi预测市场API封装与量化策略实践
1. 项目概述:一个为Kalshi预测市场打造的自动化工具箱如果你对预测市场感兴趣,或者正在寻找一种程序化的方式来管理你在Kalshi平台上的交易活动,那么你可能会对这个名为kalshi-skill的项目产生共鸣。简单来说,这是一个基于Python的…...

STM32+原理图+PCB程序直流充电桩主控方案源
💥💥💞💞欢迎来到本博客❤️❤️💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭:行百…...

企业内网虚拟机如何通过Taotoken安全接入多模型API
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内网虚拟机如何通过Taotoken安全接入多模型API 在许多企业的技术架构中,开发与测试环境常部署于内网虚拟机中。这些…...

如何做谷歌SEO排名优化?搞定高质量外链的4种高成功率技巧
很多刚接触谷歌SEO的朋友发现,自己的网站内容写了不少,可排名始终在搜索结果的五六页开外晃悠。排除掉网站技术层面的小毛病,最让大家头疼的往往就是外链。你可以把外链看作是其他网站给你的“信任投票”,如果投给你的都是些街边的…...