学习记录:VS2019+OpenCV3.4.1实现SURF库函数的调用
最近在学习opencv的使用,在参照书籍《OpenCV3编程入门》实现SURF时遇到不少问题,下面做归纳总结。
错误 LNK2019 无法解析的外部符号 “public: static struct cv::Ptr __cdecl cv::xfeatures2d::SURF::create(double,int,int,bool,bool)” (?create@SURF@xfeatures2d@cv@@SA?AU?$Ptr@VSURF@xfeatures2d@cv@@@3@NHH_N0@Z)
因opencv_ffmpeg.dll、opencv_ffmpeg_64.dll和ffmpeg_version.cmake这三个文件下载失败,而无法生成opencv_xfeatures2d341d.lib
由于找不到opencv_features2d341d.dll……
几个巨坑的问题!!!
1.先贴出我的源码(照着书抄的)
main.c
#include <iostream>
#include <iomanip>
#include <windows.h>
#include <vector>
#include <time.h>
#include <stdio.h>
#include "../include/camera.h" //camera.h是自定义头文件
#include "../include/myopencv.h" //myopencv.h是自定义头文件
#pragma warning(disable:26812) //忽略相机状态枚举enum警告using namespace std;
using namespace cv; //opencv的命名空间int main(int argc, char argv[])
{//显示当前OpenCV的版本号printf("opencv version = %s\n", CV_VERSION);//载入两张原图并显示Mat src1 = imread("../picture/pic-test.jpg");Mat src2 = imread("../picture/logo.jpg");namedWindow("src1", WINDOW_KEEPRATIO);imshow("src1", src1);namedWindow("src2", WINDOW_KEEPRATIO);imshow("src2", src2);//定义SURF需要用到的变量和类int minHessian = 400; //SURF中的hessian阈值特征点检测算子// SURF与SurfFeatureDetector等价//定义一个SurfFeatureDetector(SURF) 特征检测类对象Ptr<cv::xfeatures2d::SurfFeatureDetector>detector = cv::xfeatures2d::SurfFeatureDetector::create(minHessian);std::vector<KeyPoint> keypoints_1, keypoints_2;//调用detect函数检测出SURF特征关键点,保存在vector容器中detector->detect(src1,keypoints_1);detector->detect(src2, keypoints_2);//绘制特征关键点Mat img_keypoints_1, img_keypoints_2;
drawKeypoints(src1,keypoints_1,img_keypoints_1,Scalar(0,255,0),DrawMatchesFlags::DEFAULT);drawKeypoints(src2, keypoints_2, img_keypoints_2, Scalar(0, 255, 0), DrawMatchesFlags::DEFAULT);//显示效果图namedWindow("特征点检测效果图1", WINDOW_KEEPRATIO);namedWindow("特征点检测效果图2", WINDOW_KEEPRATIO);imshow("特征点检测效果图1", img_keypoints_1);imshow("特征点检测效果图2", img_keypoints_2);waitKey(0);/*while (1);*/ return 0;
}
myopencv.h
#pragma once
#pragma comment(lib,"../lib/opencv_world341.lib") //Opencv的静态链接库
#pragma comment(lib,"../lib/opencv_world341d.lib")
#pragma comment(lib,"../lib/opencv_calib3d341d.lib")
#pragma comment(lib,"../lib/opencv_core341d.lib")
#pragma comment(lib,"../lib/opencv_dnn341d.lib")
#pragma comment(lib,"../lib/opencv_features2d341d.lib")
#pragma comment(lib,"../lib/opencv_flann341d.lib")
#pragma comment(lib,"../lib/opencv_highgui341d.lib")
#pragma comment(lib,"../lib/opencv_imgcodecs341d.lib")
#pragma comment(lib,"../lib/opencv_imgproc341d.lib")
#pragma comment(lib,"../lib/opencv_ml341d.lib")
#pragma comment(lib,"../lib/opencv_objdetect341d.lib")
#pragma comment(lib,"../lib/opencv_photo341d.lib")
#pragma comment(lib,"../lib/opencv_shape341d.lib")
#pragma comment(lib,"../lib/opencv_stitching341d.lib")
#pragma comment(lib,"../lib/opencv_superres341d.lib")
#pragma comment(lib,"../lib/opencv_video341d.lib")
#pragma comment(lib,"../lib/opencv_videoio341d.lib")
#pragma comment(lib,"../lib/opencv_videostab341d.lib")
#pragma comment(lib,"../lib/opencv_xfeatures2d341d.lib")#include <iostream>
#include <windows.h>
#include <vector>
#include "../include/opencv2/opencv.hpp"
#include "../include/opencv2/core/core.hpp"
#include "../include/opencv2/highgui/highgui.hpp"
#include "../include/opencv2/imgproc/imgproc.hpp"
#include "../include/opencv2/imgproc/imgproc_c.h"
#include "../opencv_contrib-3.4.1/modules/xfeatures2d/include/opencv2/xfeatures2d/nonfree.hpp"
#include "../opencv_contrib-3.4.1/modules/xfeatures2d/include/opencv2/xfeatures2d.hpp"
#include "../include/opencv2/features2d/hal/interface.h"//#define MYCOUTMAT //是否选择重载输出MAT
using namespace cv; //opencv的命名空间
using namespace std;#ifdef MYCOUTMATostream& operator << (ostream& output, Mat& M);
#endif // MYCOUTMATvoid DisPlayPixelValue_PtrWay(Mat img, int start_pixelrow, int strat_pixelcol, int num_row, int num_col);
int DisPlayPixelValue_PiontWay(Mat img, int row, int col, int channel);2.根据上面两个文件讲一讲我遇到的问题
首先建议大家下载一个everything,帮助查找文件,有些文件可能并不是没生成,而是生成的地方和别人不一样!!!
(1)nonfree.hpp和xfeatures2d.hpp文件在哪
在实现SURF时要用到这两个.hpp文件,而这两个文件不在opencv文件夹中,而是在opencv_contrib-3.4.1文件夹中,可参考我的路径找找。除此之外你可能还有修改一下这两个文件里头文件的include路径,例如下面,当然这个不是都一样的,取决于对应文件在个人电脑中的路径,这让人头大。
nonfree.hpp
原本是
#include<opencv2/features2d.hpp>
但根据需要我改成了
#include "../../../../../../include/opencv2/features2d/features2d.hpp"
两个.hpp文件找到后,并修改其中的include路径,就能定义SurfFeatureDetector类了。
//定义一个SurfFeatureDetector(SURF) 特征检测类对象Ptr<cv::xfeatures2d::SurfFeatureDetector>detector = cv::xfeatures2d::SurfFeatureDetector::create(minHessian);
(2)错误 LNK2019 无法解析的外部符号 “public: static struct cv::Ptr __cdecl cv::xfeatures2d::SURF::create(double,int,int,bool,bool)” (?create@SURF@xfeatures2d@cv@@SA?AU?$Ptr@VSURF@xfeatures2d@cv@@@3@NHH_N0@Z)
①找到问题
在成功引用了nonfree.hpp和xfeatures2d.hpp文件后,编写代码就没有遇到什么问题了,但是运行后爆出上面的问题,脑子直接炸了。
百度后发现不少人有这个问题,参见https://blog.csdn.net/weixin_38383877/article/details/88417475
问题是
opencv_xfeatures2d320d.lib
opencv_features2d320d.lib
在哪里?
②生成这两个.lib
生成这两lib,关键在于如何使用cmake,这里推荐两个博主文章做参考,它们在细节上稍有区别,大家根据自己情况选择,我也不清楚为什么,玄学的很
https://blog.csdn.net/weixin_45645281/article/details/114937793
https://blog.csdn.net/weixin_42012977/article/details/82992962
参考了他们的文章,我在配置时做了这两件事:1)OPENCV_EXTRA_MODULES_PATH中
添加opencv_contrib-3.4.1/opencv_contrib-3.4.1/modules的路径;2)WITH_CUDA未勾选
在cmake中Configure和generate完后就可以Open Project了,这里推荐一篇博主文章
https://blog.csdn.net/excelNo1/article/details/118142075
看其中的第十步骤,编译CMakeTargets中的INSTALL,最后窗口会生成144项(我只有133不知道为什么),反正最后能生成我们要的.lib就行了
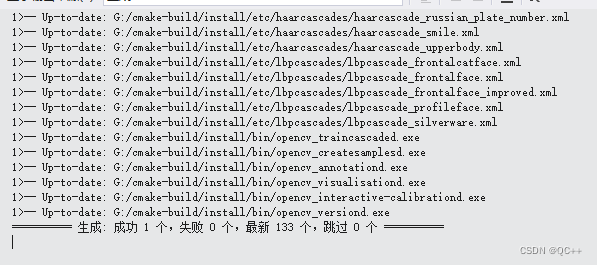
接着我们到工程的install文件夹下就能看到很多lib文件了,其中就有我们需要的。
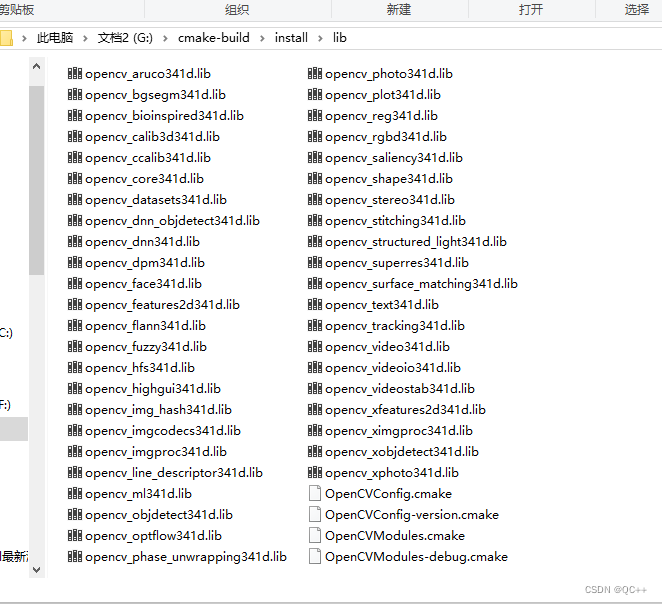
建议将这些.lib文件都添加到自己的工程里。另外有时在cmake配置时因opencv_ffmpeg.dll、opencv_ffmpeg_64.dll和ffmpeg_version.cmake这三个文件下载失败,而无法生成opencv_xfeatures2d341d.lib,可以参考这两篇文章
https://www.cnblogs.com/zss0502/p/12694737.html
https://blog.csdn.net/qq_34801642/article/details/105577349
到此为止,.lib生成完毕,然而程序还是跑不了,接着往下看
③由于找不到opencv_features2d341d.dll……程序无法执行
在cmake生成lib文件时也会生成很多dll文件,它们在install文件夹的bin目录下,在运行程序时需要调用它们。
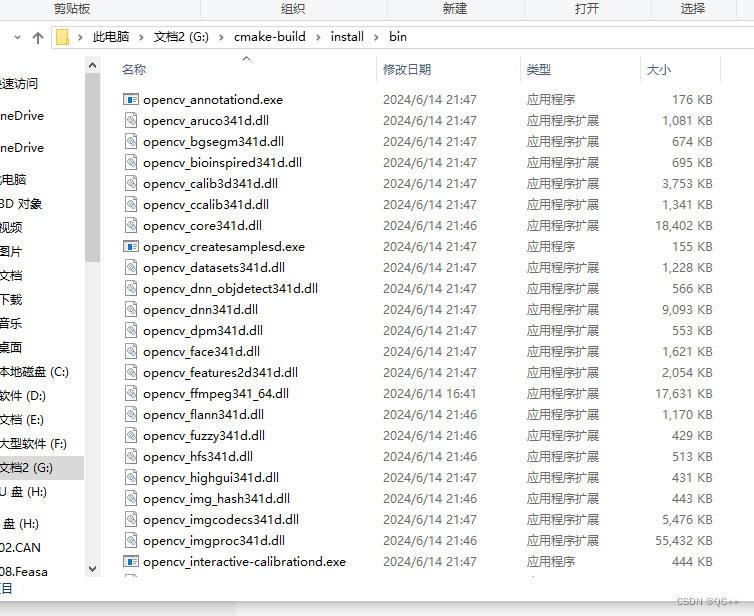
解决方法是把bin目录添加到电脑的系统变量PATH里,我是复制了bin文件夹放到opencv里在添加到系统变量PATH里
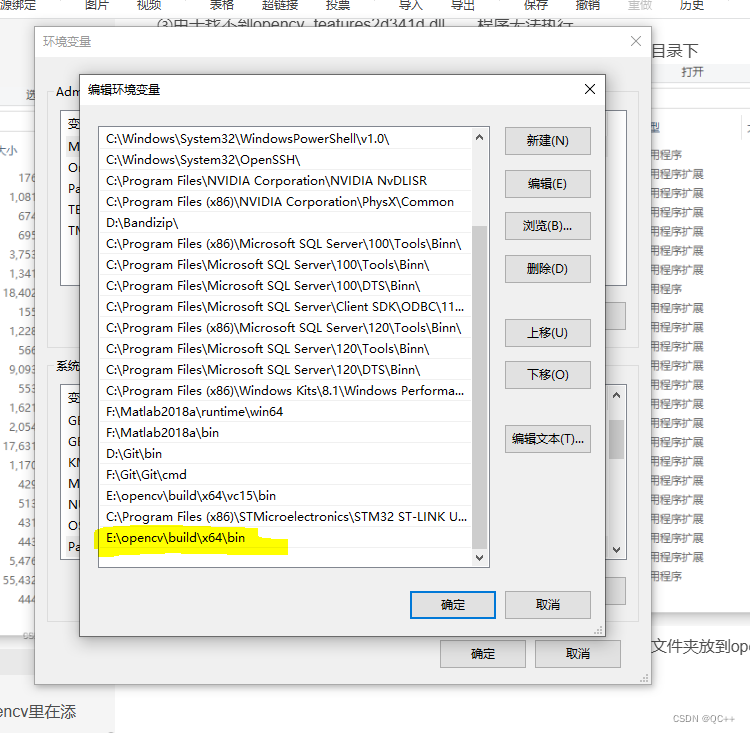
这个感觉和安装opencv时添加build\x64\vc15\bin的路径的目的是一样的,因为build\x64\vc15\bin目录下也有不少dll文件,例如opencv_world341d.dll
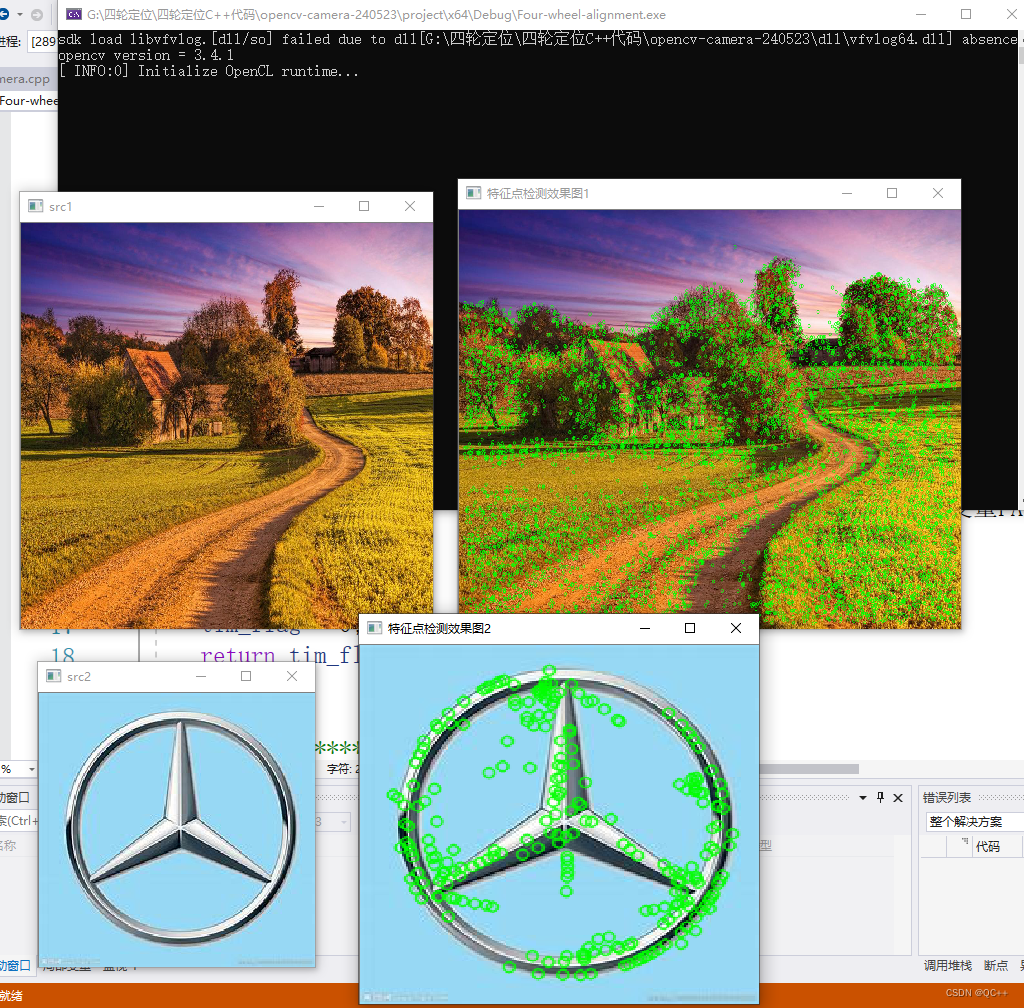
完成以上工作,最后SURF程序就可以运行了。
3.上面程序运行效果图如下
相关文章:
学习记录:VS2019+OpenCV3.4.1实现SURF库函数的调用
最近在学习opencv的使用,在参照书籍《OpenCV3编程入门》实现SURF时遇到不少问题,下面做归纳总结。 错误 LNK2019 无法解析的外部符号 “public: static struct cv::Ptr __cdecl cv::xfeatures2d::SURF::create(double,int,int,bool,bool)” (?createSUR…...
JVM-基础知识
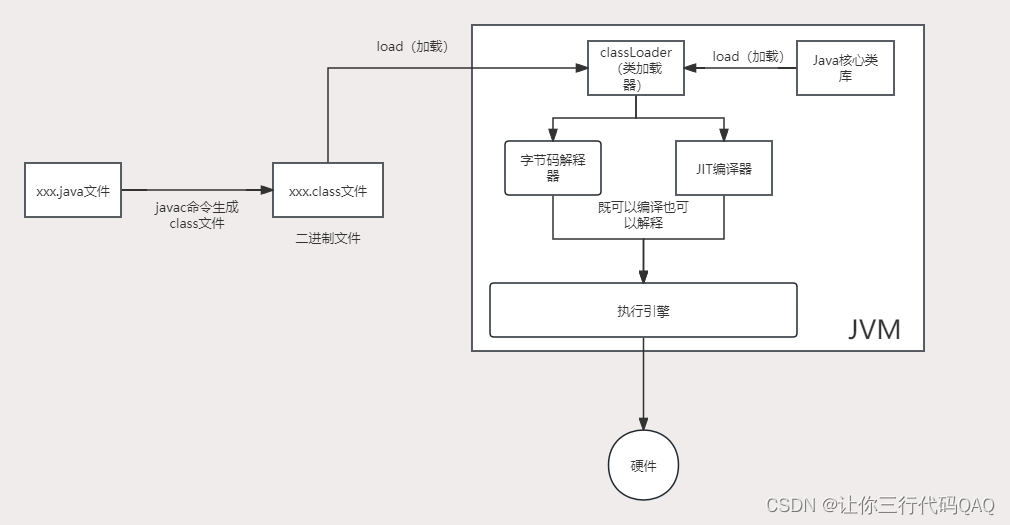
JVM-基础知识 什么是JVM JVM是一种跨语言的平台,任何语言只要能编译成.class文件都可以被JVM运行。JVM只和.class文件有关系,和Java语言没关系。JVM是一种虚拟机规范。 java文件是如何交给JVM执行的 JVM的常见实现 HostStop:Oracle官方另外还有IBM的J9、…...

保密工作应党而生、伴党而行、为党而兴
1.(C )工作应党而生、伴党而行、为党而兴,始终是党和国家的一项重要工作。 A. 农业 B. 国防 C. 保密 D. 文化 2.机关、单位对所产生的国家秘密事项,应当按照国家秘密及其密级的具体范围的规定确定密级,同时确定&#x…...

docker login 报错: http: server gave HTTP response to HTTPS client
环境: 自建 Harbor、Docker 1. 问题分析 # 命令,这里用的是 IP,可以为域名 docker login -u test 172.16.51.182:31120 # 输入密码 Password:# 报错如下: Error response from daemon: Get "https://172.16.51.182:31120/…...

「C系列」C 文件读写
文章目录 一、C 文件读写1. 打开文件2. 写入文件3. 读取文件4. 关闭文件5. 文件读写模式6. 错误处理 二、常见问题1. 文件打开失败2. 文件读写错误3. 文件读写位置4. 缓冲区刷新 三、相关链接 一、C 文件读写 在C语言中,文件读写是通过一系列的标准库函数来完成的&…...

编程中的cos:深度解析与应用探索
编程中的cos:深度解析与应用探索 在编程的广阔天地中,cos这一数学概念扮演着举足轻重的角色。它不仅是数学函数库中的基础元素,更是图形渲染、科学计算以及数据处理等多个领域的核心工具。本文将从四个方面、五个方面、六个方面和七个方面&a…...

计算机毕业设计hadoop+spark+hive知识图谱酒店推荐系统 酒店数据分析可视化大屏 酒店爬虫 高德地图API 酒店预测系统 大数据毕业设计
流程: 1.Python爬取去哪儿网全站旅游数据约10万,存入mysql; 2.使用pandasnumpy/hadoopmapreduce对mysql中旅游数据进行数据清洗,使用高德API计算地理信息,最终转为.csv文件上传hdfs; 3.hive建库建表导入.csv文件作为数据集&#x…...

简单谈谈云服务器私网IP的存在意义及优势
云服务器是基于虚拟化技术的计算资源,可以在云平台上灵活创建和管理。为了满足不同用户的需求,云服务提供商在云服务器上分配了两种类型的IP地址:公网IP和私网IP。其中,私网IP是指在局域网内使用的内部IP地址,无法通过…...
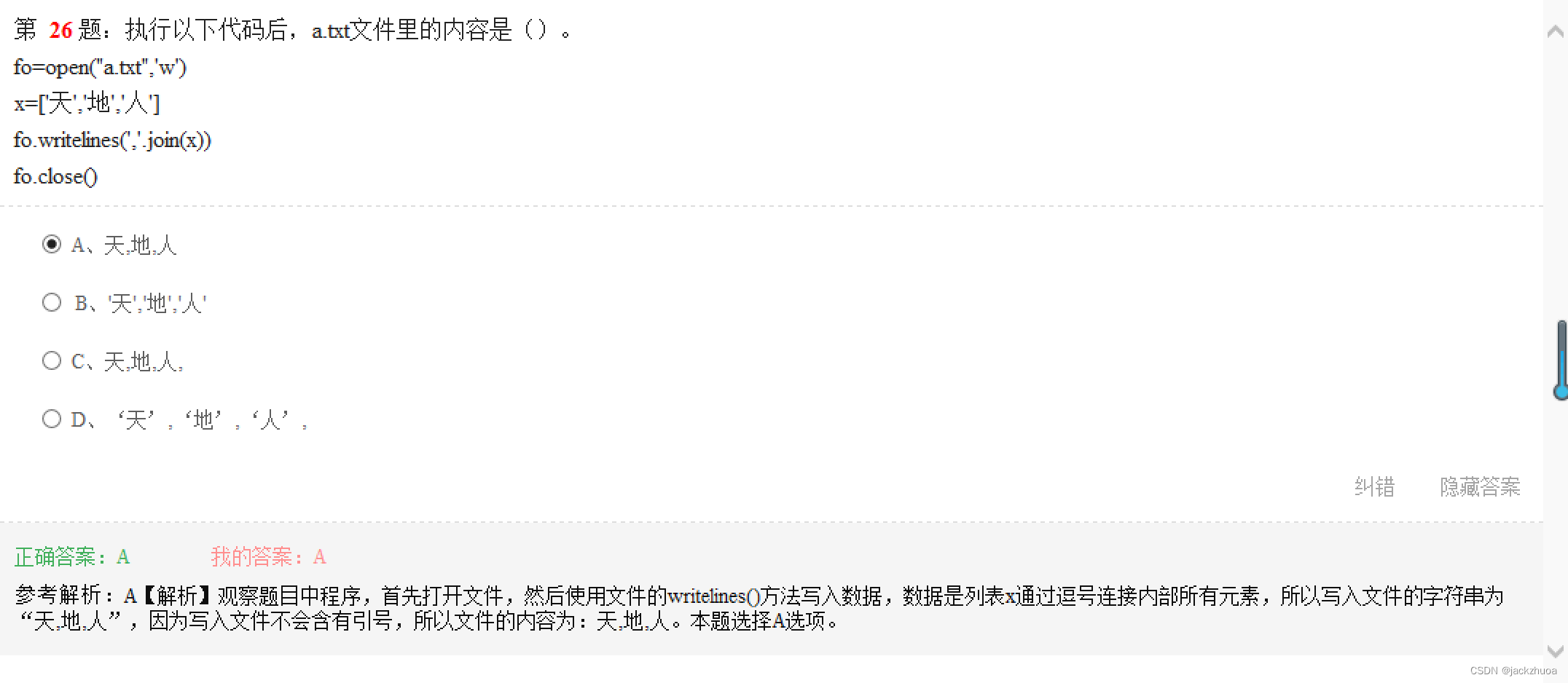
python错题(2)
、...
禁止methtype联网
mathtype断网_如何禁止mathtype联网-CSDN博客https://blog.csdn.net/qq_41060221/article/details/128144783...

【iOS】UI学习——cell的复用及自定义cell
目录 前言cell的复用手动(非注册)自动(注册) 自定义cell总结 前言 Cell复用和自定义Cell是在开发iOS应用时常见的一种优化技巧和定制需求。 Cell复用是UITableView或UICollectionView的一个重要优化机制。当用户滚动这些视图时…...

【详细介绍下PostgreSQL】
🌈个人主页: 程序员不想敲代码啊 🏆CSDN优质创作者,CSDN实力新星,CSDN博客专家 👍点赞⭐评论⭐收藏 🤝希望本文对您有所裨益,如有不足之处,欢迎在评论区提出指正,让我们共…...

基于Matlab停车场车牌识别计时计费管理系统 【W2】
简介 停车场车牌识别计时计费管理系统在现代城市管理中具有重要意义。随着城市化进程的加快和车辆数量的增加,传统的人工管理停车场的方式已经难以满足效率和精确度的要求。因此引入车牌识别技术的自动化管理系统成为一种趋势和解决方案。 背景意义 提升管理效率&a…...

码住!详解时序数据库不同分类与性能对比
加速发展中的时序数据库,基于不同架构,最流行的类别是? 作为管理工业场景时序数据的新兴数据库品类,时序数据库凭借着对海量时序数据的高效存储、高可扩展性、时序分析计算等特性,一跃成为物联网时代工业领域颇受欢迎的…...

【C/C++】实参与形参的区别
在编程中,形参(形式参数)和实参(实际参数)是函数调用中的两个基本概念,它们在函数定义和函数调用中扮演着不同的角色。 形参(Formal Parameters): 形参是在函数定义时声明…...

---异常---
我们在运行程序时总遇到各种与报错,数组越界,空指针的引用,这些在java中都称为异常 对于不同的错误都具有一个与他对应的异常类来秒描述 这是对于数组越界这个类里有的方法,这些是描述异常的 在java中有一个完整的描述异常的类的…...
python如何终止程序运行
方法1:采用sys.exit(0),正常终止程序,从图中可以看到,程序终止后shell运行不受影响。 方法2:采用os._exit(0)关闭整个shell,从图中看到,调用sys._exit(0)后整个shell都重启了(RESTAR…...

网络:用2个IP地址描述一个连接
用2个IP地址描述一个连接。这是在阅读了《TCP/IP指南》后的感想,与工业标准不同,需注意区分。 如果一个IP地址有48位,则用96位描述一个连接 对于单播,是每个IP分别描述位置。位置包括:邮局编号主机编号,采用…...

Nodejs--构建web应用
构建web应用 将从http模块中的服务器端中的request使劲按开始分析,request时间发生于网络连接建立,客户端想服务器发送报文,服务器解析报文,发现http请求的报文的时候,在出发request事件之前,已经准备好Se…...

C++ 二分查找法【面试】
在C中实现二分查找法是一个常见的面试问题。二分查找法是一种在有序数组中查找特定元素的算法,其时间复杂度为O(log n)。以下是使用C实现二分查找的示例代码: #include <iostream> #include <vector>// 二分查找法函数 int binarySearch(co…...

企业级应用如何利用多模型聚合能力优化AI功能
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业级应用如何利用多模型聚合能力优化AI功能 在开发复杂的企业应用,如客户关系管理(CRM)或企业…...

pyecharts-assets终极指南:告别网络依赖,打造本地可视化环境
pyecharts-assets终极指南:告别网络依赖,打造本地可视化环境 【免费下载链接】pyecharts-assets 🗂 All assets in pyecharts 项目地址: https://gitcode.com/gh_mirrors/py/pyecharts-assets 还在为pyecharts图表加载慢而烦恼吗&…...

基于LangChain与本地LLM构建私有化知识库问答系统实践
1. 项目概述:从零构建一个垂直领域的知识库与问答系统最近在整理个人技术资料时,我遇到了一个非常典型的问题:手头积累了大量来自不同渠道的电子书、技术文档、知乎专栏文章以及各种开源项目的README,内容虽然优质,但过…...

现代安全监控系统构建指南:从IPVS架构到智能分析实战
1. 项目概述:从“想要”到“拥有”,安全监控系统的核心价值“安华高科技给你想要的安全监控系统!”——这个标题听起来像是一句承诺,但背后其实是一个复杂的系统工程。作为一名在安防行业摸爬滚打了十几年的从业者,我见…...

Cursor Pro功能完全解锁指南:三步实现免费无限使用体验
Cursor Pro功能完全解锁指南:三步实现免费无限使用体验 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your tr…...

JoyCon-Driver:让Switch手柄在Windows上重获新生的完整方案
JoyCon-Driver:让Switch手柄在Windows上重获新生的完整方案 【免费下载链接】JoyCon-Driver A vJoy feeder for the Nintendo Switch JoyCons and Pro Controller 项目地址: https://gitcode.com/gh_mirrors/jo/JoyCon-Driver 你是否曾经想过,让闲…...

如何快速掌握raylib游戏开发:面向初学者的完整实践指南
如何快速掌握raylib游戏开发:面向初学者的完整实践指南 【免费下载链接】raylib A simple and easy-to-use library to enjoy videogames programming 项目地址: https://gitcode.com/GitHub_Trending/ra/raylib 你是否曾梦想过开发自己的游戏,却…...

TypeScript函数式编程实战:fp-ts生产级应用技巧与模式解析
1. 项目概述:从类型体操到生产级函数式编程如果你在TypeScript社区里混迹过一段时间,大概率听说过或者用过fp-ts这个库。它把Haskell风格的函数式编程范式带到了TypeScript世界,提供了Option、Either、Task、Reader等一系列强大的代数数据类型…...

三步实现本地化视频硬字幕提取:免费AI工具轻松生成SRT字幕文件
三步实现本地化视频硬字幕提取:免费AI工具轻松生成SRT字幕文件 【免费下载链接】video-subtitle-extractor 视频硬字幕提取,生成srt文件。无需申请第三方API,本地实现文本识别。基于深度学习的视频字幕提取框架,包含字幕区域检测、…...

OBS Multi RTMP插件:终极多平台直播同步解决方案
OBS Multi RTMP插件:终极多平台直播同步解决方案 【免费下载链接】obs-multi-rtmp OBS複数サイト同時配信プラグイン 项目地址: https://gitcode.com/gh_mirrors/ob/obs-multi-rtmp 在当今的多平台直播时代,内容创作者面临着同时向多个平台推送直…...