Hi3861 OpenHarmony嵌入式应用入门--点灯
本篇实现对gpio的控制,通过控制输出进行gpio的点灯操作。
硬件
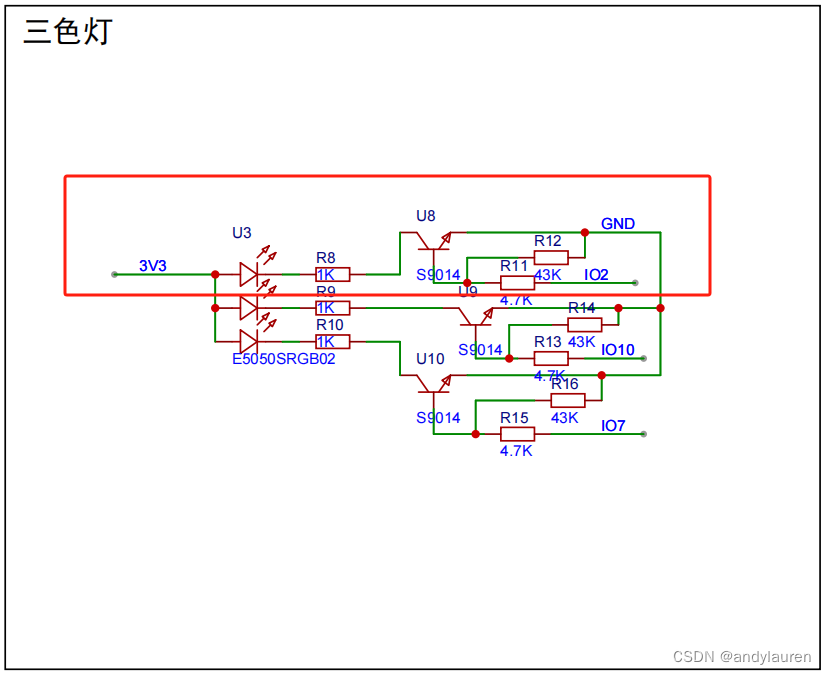
我们来操作IO2,控制绿色的灯。
软件
GPIO API
| API名称 | 说明 |
| hi_u32 hi_gpio_deinit(hi_void); | GPIO模块初始化 |
| hi_u32 hi_io_set_pull(hi_io_name id, hi_io_pull val); | 设置某个IO上下拉功能。 |
| hi_u32 hi_gpio_set_dir(hi_gpio_idx id, hi_gpio_dir dir); | 设置GPIO引脚方向,id参数用于指定引脚,dir参数用于指定输入或输出 |
| hi_u32 hi_gpio_set_ouput_val(hi_gpio_idx id, hi_gpio_value val); | 设置GPIO引脚的输出状态,id参数用于指定引脚,val参数用于指定高电平或低电平 |
| hi_u32 hi_io_set_func(hi_io_name id, hi_u8 val); | 设置引脚功能,id参数用于指定引脚,val用于指定引脚功能 |
| hi_u32 hi_gpio_deinit(hi_void); | 解除GPIO模块初始化 |
修改D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\BUILD.gn文件,让工程编译led代码
# Copyright (c) 2023 Beijing HuaQing YuanJian Education Technology Co., Ltd
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License. import("//build/lite/config/component/lite_component.gni")lite_component("demo") {features = ["base_01_led:base_led_example",]
}
创建D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\base_01_led文件夹
文件夹中创建D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\base_01_led\base_led_example.c文件D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\base_01_led\BUILD.gn文件
# Copyright (c) 2023 Beijing HuaQing YuanJian Education Technology Co., Ltd
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License. static_library("base_led_example") {sources = ["base_led_example.c",]include_dirs = ["//utils/native/lite/include","//kernel/liteos_m/kal/cmsis","//base/iot_hardware/peripheral/interfaces/kits","//vendor/hqyj/fs_hi3861/common/bsp/include"]
}/** Copyright (c) 2023 Beijing HuaQing YuanJian Education Technology Co., Ltd* Licensed under the Apache License, Version 2.0 (the "License");* you may not use this file except in compliance with the License.* You may obtain a copy of the License at** http://www.apache.org/licenses/LICENSE-2.0** Unless required by applicable law or agreed to in writing, software* distributed under the License is distributed on an "AS IS" BASIS,* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.* See the License for the specific language governing permissions and* limitations under the License.*/#include <stdio.h>
#include <unistd.h>#include "cmsis_os2.h"
#include "hi_gpio.h"
#include "hi_io.h"
#include "ohos_init.h"#define LED HI_IO_NAME_GPIO_2 // 开发板三色灯其中一个引脚osThreadId_t Task1_ID = 0; // 任务1 ID
hi_gpio_value val, val_last; // GPIO的状态值
#define TASK_STACK_SIZE 1024
#define TASK_DELAY_TIME (1000 * 1000)/*** @description: 任务1* @param {*}* @return {*}*/
void Task1(void)
{printf("enter Task 1.......\r\n");hi_gpio_init(); // GPIO初始化hi_io_set_pull(LED, HI_IO_PULL_DOWN); // 设置GPIO下拉,保证上电时为灭灯状态hi_io_set_func(LED, HI_IO_FUNC_GPIO_2_GPIO); // 设置IO2为GPIO功能hi_gpio_set_dir(LED, HI_GPIO_DIR_OUT); // 设置GPIO为输入模式while (1) {hi_gpio_set_ouput_val(LED, HI_GPIO_VALUE0); // 设置GPIO引脚为低电平usleep(TASK_DELAY_TIME); // 1s sleephi_gpio_set_ouput_val(LED, HI_GPIO_VALUE1); // 设置GPIO引脚为高电平usleep(TASK_DELAY_TIME); // 1s sleep}
}/*** @description: 初始化并创建任务* @param {*}* @return {*}*/
static void base_led_demo(void)
{printf("[demo] Enter base_led_demo()!\r\n");osThreadAttr_t taskOptions;taskOptions.name = "Task1"; // 任务的名字taskOptions.attr_bits = 0; // 属性位taskOptions.cb_mem = NULL; // 堆空间地址taskOptions.cb_size = 0; // 堆空间大小taskOptions.stack_mem = NULL; // 栈空间地址taskOptions.stack_size = TASK_STACK_SIZE; // 栈空间大小 单位:字节taskOptions.priority = osPriorityNormal; // 任务的优先级:wqTask1_ID = osThreadNew((osThreadFunc_t)Task1, NULL, &taskOptions); // 创建任务1if (Task1_ID != NULL) {printf("ID = %d, Create Task1_ID is OK!\r\n", Task1_ID);}
}
SYS_RUN(base_led_demo);
目录结构
│ config.json
│
├─common
│ └─bsp
│ ├─include
│ └─src
├─demo
│ │ BUILD.gn
│ │
│ ├─base_00_helloworld
│ │ base_helloworld_example.c
│ │ BUILD.gn
│ │
│ └─base_01_led
│ base_led_example.c
│ BUILD.gn
│
└─doc│ HarmonyOS开发板实验指导书 v2.1.pdf│ 华清远见 FS_Hi3861开发指导.md│ 华清远见 FS_Hi3861新手入门手册.md│├─board│ FS-Hi3861-V4.2.pdf│ FS-Hi3861QDB-V3.2.pdf│ hi-12f_kit_v1.1.0A7E6BCB9%A6-20211025.pdf│ hi-12f_v1.1.2-A7E6BCB9%A6-20211202.pdf│ nodemcu-hi-07s_12f-kit_v1.1-20210913.pdf│ RTplay2.01_2024-06-14.pdf│└─figures使用build
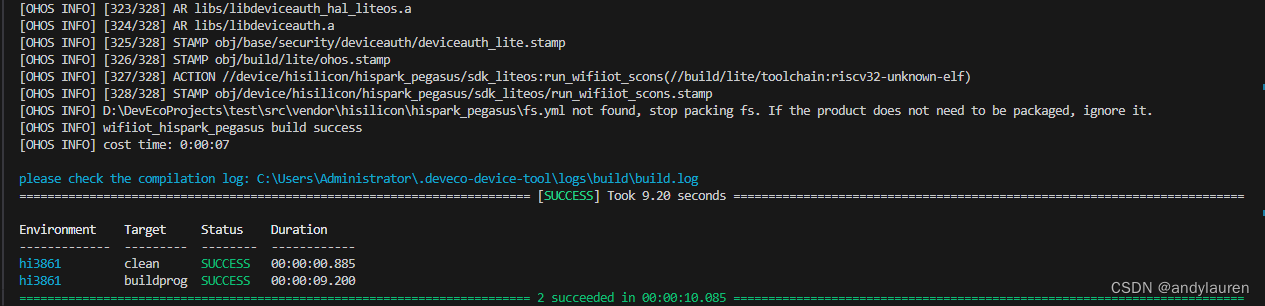
效果就是LED间隔1秒闪烁。
相关文章:
Hi3861 OpenHarmony嵌入式应用入门--点灯
本篇实现对gpio的控制,通过控制输出进行gpio的点灯操作。 硬件 我们来操作IO2,控制绿色的灯。 软件 GPIO API API名称 说明 hi_u32 hi_gpio_deinit(hi_void); GPIO模块初始化 hi_u32 hi_io_set_pull(hi_io_name id, hi_io_pull val); 设置某个IO…...

SaaS案例分享:成功构建销售渠道的实战经验
面对SaaS产品推广的难题,你是否曾感到迷茫,不知如何选择有效的销售渠道?Shopify独立站联盟营销或许能为你提供新的思路。Shopify作为领先的电商解决方案提供商,其独立站功能为众多商家提供了强大的在线销售平台。而联盟营销&#…...
密钥管理简介
首先我们要知道什么是密钥管理? 密钥管理是一种涉及生成、存储、使用和更新密钥的过程。 密钥的种类 我们知道,对称密码主要包括分组密码和序列密码。但有时也可以将杂凑函数和消息认证码划分为这一类,将它们的密钥称为对称密钥;…...
2024中国应急(消防)品牌巡展成都站成功召开!
汇聚品牌力量,共同相聚成都。6月14日,由中国安全产业协会指导,中国安全产业协会应急创新分会、应急救援产业网联合主办,四川省消防协会协办的“一切为了安全”2024年中国应急(消防)品牌巡展-成都站成功举办。该巡展旨在展示中国应…...

ansible-Role角色批量按照node_export节点,并追加信息到Prometheus文件中
文章目录 剧本功能 inventory.yaml文件定义deploy.yaml角色定义node_exporter_lock角色定义任务角色main.yamlnode_exporter_tasks.yml角色触发任务notifyextra_tasks.yml角色prometheus_node_config.j2模板文件 执行命令查看变量 剧本功能 功能1: 批量执行node_ex…...

求最小公倍数 、小球走过路程计算 题目
题目 JAVA11 求最小公倍数分析:代码:大佬代码: JAVA12 小球走过路程计算分析:代码: JAVA11 求最小公倍数 描述 编写一个方法,该方法的返回值是两个不大于100的正整数的最小公倍数。 输入描述:…...

【Android面试八股文】你能说一说为什么IO是耗时操作?
IO(输入/输出)操作之所以是耗时操作,主要是由于以下几个原因: 1. 物理设备的限制 机械动作:传统的硬盘驱动器(HDD)包含旋转的磁盘和移动的磁头,以读取或写入数据。这些机械动作需要时间完成。虽然固态硬盘(SSD)没有机械部件,但它们仍然受到电子信号传输速度的限制。…...

怎样增强 CLike 游戏的社交功能,促进玩家之间的互动和交流?
要增强CLike游戏的社交功能,以促进玩家之间的互动和交流,可以考虑以下几个方面: 添加聊天功能:在游戏中加入实时聊天功能,让玩家可以在游戏内互相交流。可以通过文本聊天或者语音聊天来实现。 社交平台集成࿱…...
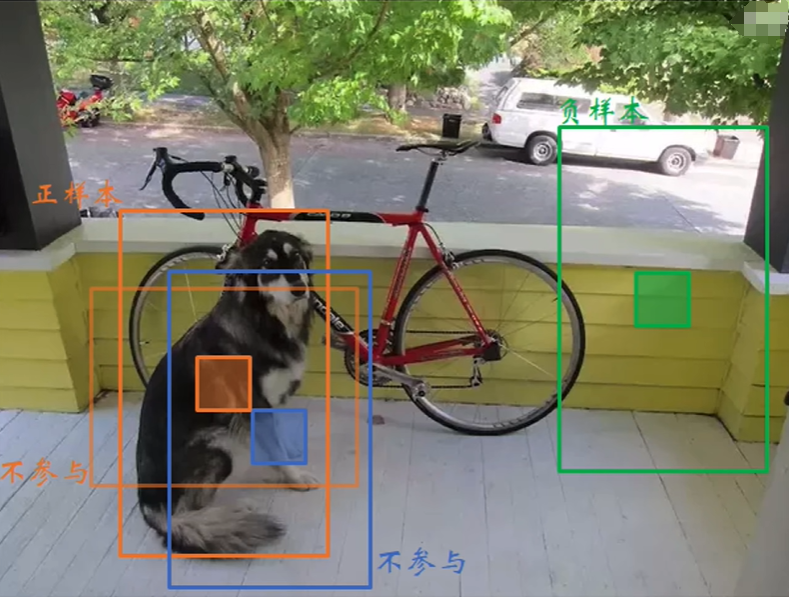
12_YouOnlyLookOnce(YOLOv3)新一代实时目标检测技术
1.1 回顾V1和V2 V1:05_YouOnlyLookOnce(YOLOV1)目标检测领域的革命性突破-CSDN博客 V2:07_YouOnlyLookOnce(YOLOv2)Better,Faster,Stronger-CSDN博客 1.2 简介 YOLOv3(You Only Look Once version 3)是…...

安装 Nuxt.js 的步骤和注意事项
title: 安装 Nuxt.js 的步骤和注意事项 date: 2024/6/17 updated: 2024/6/17 author: cmdragon excerpt: Nuxt.js在Vue.js基础上提供的服务器端渲染框架优势,包括提高开发效率、代码维护性和应用性能。指南详细说明了从环境准备、Nuxt.js安装配置到进阶部署技巧&…...

【perl】环境搭建
1、Vscode Strawberry Perl 此过程与tcl环境搭建很类似,请参考我的这篇文章: 【vscode】 与 【tclsh】 联合搭建tcl开发环境_tclsh软件-CSDN博客 perl语言的解释器可以选择,strawberry perl。Strawberry Perl for Windows - Releases。 …...
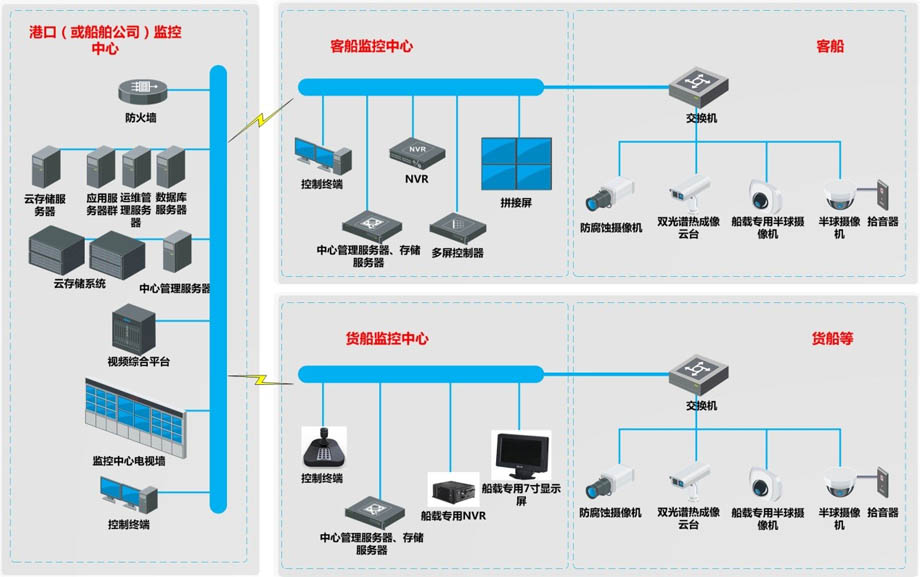
【车载音视频AI电脑】全国产海事船载视频监控系统解决方案
海事船载视频监控系统解决方案针对我国快速发展的内河航运、沿海航运和远洋航运中存在的航行安全和航运监管难题,为船舶运营方、政府监管部门提供一套集视频采集、存储、回放调阅为一体的视频监控系统,对中大型船舶运行中的内部重要部位情况和外部环境进…...
Centos SFTP搭建
SFTP配置、连接及挂载教程_sftp连接-CSDN博客1、确认是否安装yum list installed | grep openssh-server 2、创建用户和组 sudo groupadd tksftpgroup sudo useradd -g tksftpgroup -d /home/www/tk_data -s /sbin/nologin tksftp01 sudo passwd tksftp013. 配置SFTP注意&a…...
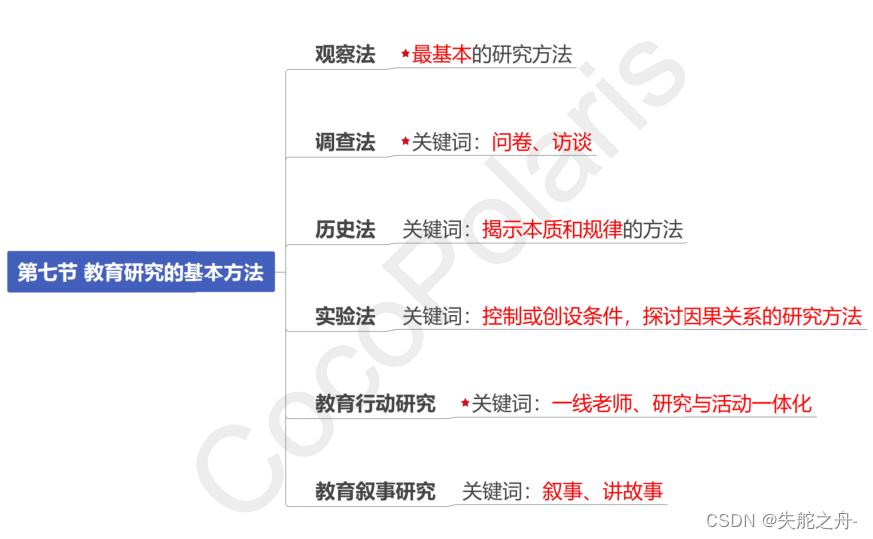
【中学教资科目二】01教育基础
01教育基础 前言第一节 教育的产生与发展1.1 教育的起源 第二节 教育学的产生和发展2.1 中国教育学的发展2.2 西方教育学的发展2.3 独立及多样化阶段2.4 马克思教育学2.5 现代教育发展 第三节 教育与社会的发展3.1 教育与文化的关系 第四节 教育与人的发展、4.1 个体身心发展的…...
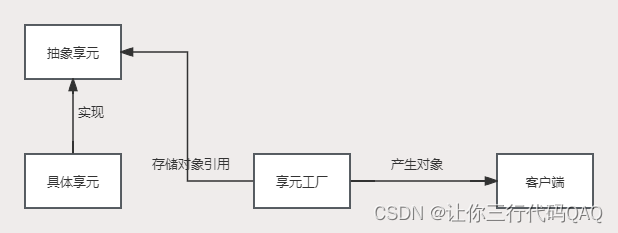
设计模式-享元模式Flyweight(结构型)
享元模式(Flyweight) 享元模式是一种结构型模式,它主要用于减少创建对象的数量,减少内存占用。通过重用现有对象的方式,如果未找到匹配对象则新建对象。线程池、数据库连接池、常量池等池化的思想就是享元模式的一种应用。 图解 角色 享元工…...

【刷题】LeetCode刷题汇总
目录 一、刷题题号1:两数之和 二、解法总结1. 嵌套循环2. 双指针 一、刷题 记录LeetCode力扣刷题 题号1:两数之和 双循环(暴力解法): class Solution {public int[] twoSum(int[] nums, int target) {int[] listne…...
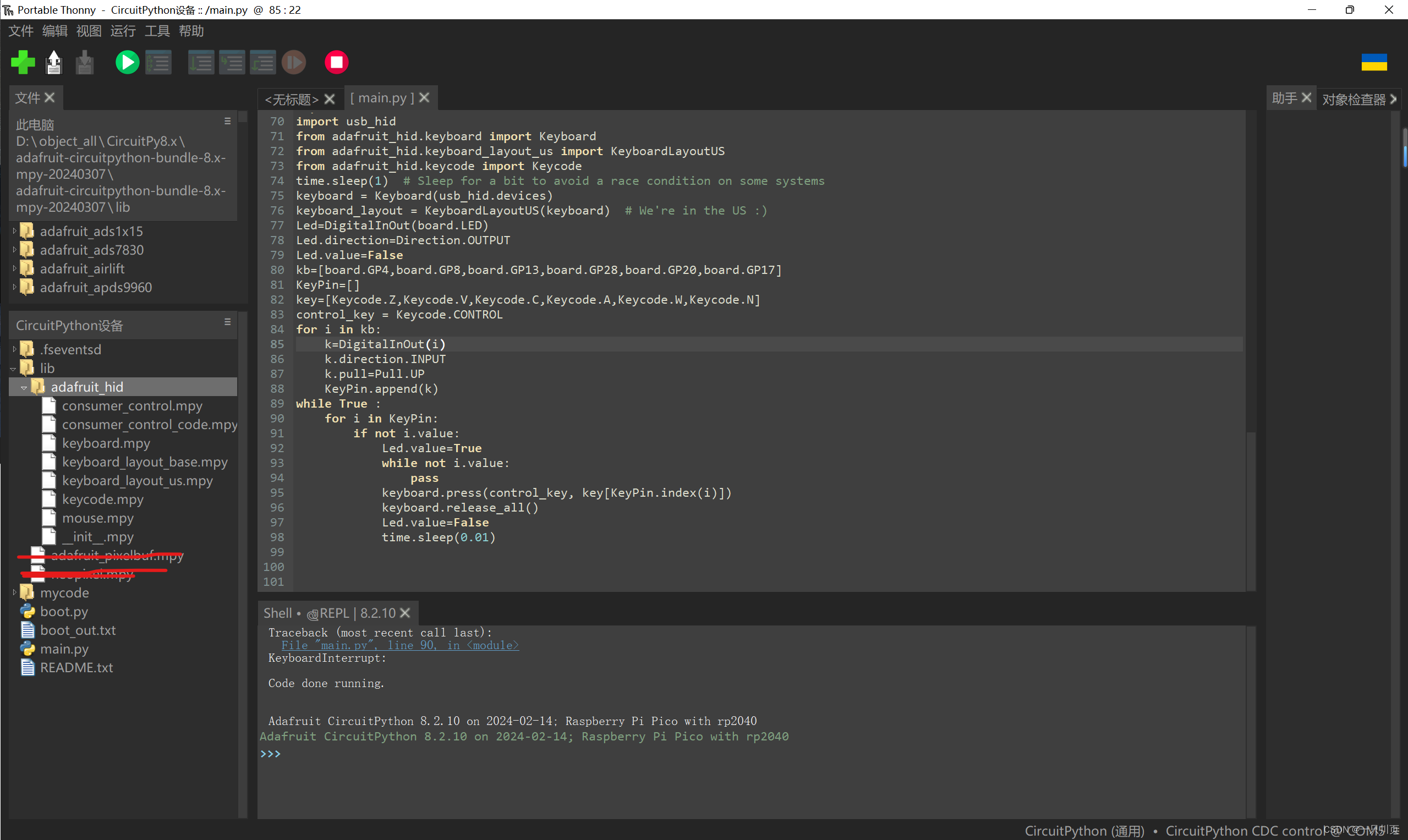
树莓派pico入坑笔记,快捷键键盘制作
使用usb_hid功能制作快捷键小键盘,定义了6个键,分别是 ctrlz ctrlv ctrlc ctrla ctrlw ctrln 对应引脚 board.GP4, board.GP8, board.GP13 board.GP28, board.GP20, board.GP17 需要用到的库,记得复制进单片机存储里面 然后是main主程…...

华为鲲鹏应用开发基础:鲲鹏处理器及关键硬件特性介绍(二)
1. 鲲鹏简介 1.1 鲲鹏处理器简介 鲲鹏处理器是华为自研的基于ARMv8指令集开发的数据中心级处理器 1.2 基于鲲鹏主板的多样化计算产品 1.3 基于鲲鹏920的华为TaiShan(泰山) 200服务器 1.3.1 TaiShan 2280服务器内部视图 1.3.2 TaiShan 2280服务器物理结构 1.3.3 TaiShan 2280服…...

Vue.js结合ASP.NET Core构建用户登录与权限验证系统
1. 环境准备2. 创建项目3. Vue配置步骤一: 安装包步骤二: 配置文件步骤三: 页面文件 4. 后台配置 在本教程中,我将利用Visual Studio 2022的强大集成开发环境,结合Vue.js前端框架和ASP.NET Core后端框架,从头开始创建一个具备用户登录与权限验…...

【html】如何利用id选择器实现主题切换
今天给大家介绍一种方法来实现主题切换的效果 效果图: 源码: <!DOCTYPE html> <html lang"zh"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initia…...

OpenClaw Dashboard:AI智能体集群的实时可视化指挥中心设计与部署
1. 项目概述:OpenClaw Dashboard,一个为AI智能体集群打造的实时指挥中心如果你正在运行一个OpenClaw智能体集群,或者对构建多智能体系统感兴趣,那么你很可能面临一个共同的痛点:如何清晰地掌控全局?当几十甚…...

VS Code图表神器:零配置用代码画UML、流程图与架构图
1. 项目概述:在VS Code里优雅地“画”图作为一名长期在技术文档、架构设计和日常笔记中与图表打交道的老兵,我深知一个痛点:从想法到一张清晰可用的图表,中间往往隔着“安装Java环境”、“配置GraphViz路径”、“折腾渲染引擎”等…...


GPU内核优化:R3框架与分层自动调优实践
1. GPU内核优化的挑战与机遇在现代高性能计算和人工智能领域,GPU已经成为不可或缺的计算引擎。然而,随着硬件架构的快速迭代,保持应用程序的高性能表现变得越来越具有挑战性。传统的手工优化方法需要开发者投入数月时间,在算法设计…...

5分钟彻底解决Windows软件DLL缺失问题:VisualCppRedist AIO完整修复方案
5分钟彻底解决Windows软件DLL缺失问题:VisualCppRedist AIO完整修复方案 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经遇到过新安装的软…...

AAAI‘2026 模型记错了,检索也救不了?KG+TruthfulRAG想解决这个死结
背景介绍 近年来,大语言模型(LLM)在生成与理解任务上表现突出,但其内部“参数化知识”具有静态、滞后的特点: 面对时效性知识、专业知识、隐私知识等,模型可能缺乏覆盖;即便检索增强生成&#…...

从Distributed到Lumped:三种SPEF寄生模型,你的芯片时序分析该选哪一个?
芯片时序分析中的SPEF模型选择:精度与效率的终极权衡 在28nm以下工艺节点,互连线寄生效应导致的时序偏差可能占到整体时钟周期的30%以上。面对动辄数千万个net的现代SoC设计,工程师们不得不在模型精度与运行时间之间做出艰难抉择。就像一位资…...
)
【AI原生架构黄金法则】:SITS 2026现场实录的7条反直觉设计铁律(仅限首批参会专家内部流出)
AI原生应用架构设计:SITS 2026技术专家实战经验分享 更多请点击: https://intelliparadigm.com 第一章:SITS 2026现场共识与AI原生架构范式跃迁 在SITS 2026全球智能系统技术峰会上,来自37个国家的架构师、AI平台工程师与标准化组…...

【Midjourney水墨风创作终极指南】:20年AI视觉专家亲授7大不可外传的Ink Wash参数配方与避坑清单
更多请点击: https://intelliparadigm.com 第一章:水墨风AI创作的认知革命与历史语境 水墨艺术承载着东方哲学中“虚实相生”“气韵生动”的深层认知范式,而当生成式AI介入水墨风格建模时,其本质并非简单纹理迁移,而是…...

AVL许可排队严重?不想买新许可,回收闲置即刻算例
AVL许可排队严重?不买新许可,回收闲置许可就能解决,我就踩过这个坑关键词分析:AVL里藏着的宝藏AVL许可排队严重?别急着买新许可!我们先来看看这个问题到底藏哪儿。2026年我帮某制造业客户做系统优化时&…...