【DIY飞控板PX4移植】BARO模块BMP388气压计的PCB硬件设计和PX4驱动配置
BARO模块BMP388气压计的PCB硬件设计和PX4驱动配置
- BMP388简介
- 硬件设计
- 封装
- 原理图
- PCB设计
- 引脚选择问题
- PX4驱动配置
- 飞控板的配置文件夹结构
- default.px4board文件
- nuttx-config/nsh/defconfig文件
- nuttx-config/include/board.h文件
- src/board_config.h文件
- src/i2c.cpp文件
- init/rc.board_sensors文件
- 编译BootLoader和Firmware并烧录进自己的飞控板
BMP388简介
BMP388是一款基于成熟传感原理的压力和温度测量数字传感器。
硬件设计
封装
采用了标准的LGA封装,单位是毫米。

引脚序号。

引脚定义。

原理图
使用I2C总线进行连接时的原理图。

使用I2C总线进行连接时的原理图。

PCB设计
我这里使用的是I2C总线进行连接,连接到MCU主控的I2C1接口。

主控选择的是STM32H743VIH6,I2C1总线是使用的SDA-PB9引脚、SCL-PB8引脚,气压计的数据准备完毕信号Data_Ready是使用PB7引脚,这些信息需要记录下来,之后在PX4配置中需要用到。

引脚选择问题
这里需要注意不是所有的引脚都可以作为BMP388的连接引脚,这个需要在给定的几种方案中选择。
对于主控STM32H743VIH6来说,有以下的引脚映射头文件。
引脚映射头文件stm32h7x3xx_pinmap.h
其中有以下内容:
#define GPIO_I2C1_SCL_1 (GPIO_ALT|GPIO_AF4|GPIO_SPEED_50MHz|GPIO_OPENDRAIN|GPIO_PORTB|GPIO_PIN6)
#define GPIO_I2C1_SCL_2 (GPIO_ALT|GPIO_AF4|GPIO_SPEED_50MHz|GPIO_OPENDRAIN|GPIO_PORTB|GPIO_PIN8)
#define GPIO_I2C1_SDA_1 (GPIO_ALT|GPIO_AF4|GPIO_SPEED_50MHz|GPIO_OPENDRAIN|GPIO_PORTB|GPIO_PIN7)
#define GPIO_I2C1_SDA_2 (GPIO_ALT|GPIO_AF4|GPIO_SPEED_50MHz|GPIO_OPENDRAIN|GPIO_PORTB|GPIO_PIN9)
#define GPIO_I2C1_SMBA (GPIO_ALT|GPIO_AF4|GPIO_SPEED_50MHz|GPIO_PUSHPULL|GPIO_PORTB|GPIO_PIN5)
所以I2C1总线的SCL引脚只能从PB6、PB8中选择,SDA引脚只能从PB7、PB9中选择。
对于数据准备完毕信号的选择,由于该信号使用的是STM32的外部中断输入功能,所以它们的外部中断号不能重复,比如PE3的外部中断号是EXTI3、PE4的外部中断号是EXTI4,如果使用了外部中断号是EXTI3的PE3,那么在之后的其他数据准备完毕信号的选择中就不能选择外部中断号是EXTI3的PA3、PB3、PC3等引脚。
PX4驱动配置
飞控板的配置文件夹结构
飞控板的配置文件夹结构为下列所示。
YanQi
├─extras
| └─UCAS_YanQi_bootloader.bin
├─init
| ├─rc.board_defaults
| └─rc.board_sensors
├─nuttx-config
| ├─bootloader
| | └─defconfig
| ├─include
| | ├─board.h
| | └─board_dma_map.h
| ├─nsh
| | └─defconfig
| ├─scripts
| | ├─bootloader_script.ld
| | └─script.ld
| ├─src
| └─Kconfig
├─src
| ├─board_config.h
| ├─bootloader_main.c
| ├─CMakeLists.txt
| ├─hw_config.h
| ├─i2c.cpp
| ├─init.c
| ├─...
| └─usb.c
├─bootloader.px4board
├─default.px4board
└─firmware.prototype
default.px4board文件
default.px4board文件是最常使用的文件,它负责配置每个串口的映射,配置哪些源码被编译到飞控固件中。由于需要使用BMP388的驱动,所以需要添加一行代码。
CONFIG_DRIVERS_BAROMETER_BMP388=y
nuttx-config/nsh/defconfig文件
nuttx-config/nsh/defconfig文件配置的是飞控固件中需要调用的底层资源,比如串口驱动、SPI驱动、I2C驱动等等。
这里使用的是I2C1总线,所以需要添加以下代码。
CONFIG_STM32H7_I2C1=y
nuttx-config/include/board.h文件
board.h文件用于配置NuttX操作系统中的时钟和引脚,对于所有具有多功能引脚(比如STM32中的有些引脚既可以作为UART也可以作为普通GPIO)的外围设备,NuttX需要知道每个引脚的设定功能,它们在芯片特定的引脚映射头文件stm32h7x3xx_pinmap.h中定义。
需要按照之前的原理图设计对应引脚映射头文件进行修改。
引脚映射头文件stm32h7x3xx_pinmap.h
I2C1的引脚定义设置的代码。
#define GPIO_I2C1_SCL GPIO_I2C1_SCL_2 /* PB8 */
#define GPIO_I2C1_SDA GPIO_I2C1_SDA_2 /* PB9 */#define GPIO_I2C1_SCL_GPIO (GPIO_OUTPUT | GPIO_OPENDRAIN |GPIO_SPEED_50MHz | GPIO_OUTPUT_SET | GPIO_PORTB | GPIO_PIN8)
#define GPIO_I2C1_SDA_GPIO (GPIO_OUTPUT | GPIO_OPENDRAIN |GPIO_SPEED_50MHz | GPIO_OUTPUT_SET | GPIO_PORTB | GPIO_PIN9)
src/board_config.h文件
board_config.h文件是一些LED灯定义、ADC采样定义。需要按照之前的原理图设计的数据准备完毕信号进行配置。
#define GPIO_I2C1_DRDY1_BMP388 /* PB7 */ (GPIO_INPUT|GPIO_FLOAT|GPIO_EXTI|GPIO_PORTB|GPIO_PIN7)
src/i2c.cpp文件
需要启动I2C1总线。
constexpr px4_i2c_bus_t px4_i2c_buses[I2C_BUS_MAX_BUS_ITEMS] = {initI2CBusInternal(1),initI2CBusExternal(2),// initI2CBusExternal(3),// initI2CBusExternal(4),};
init/rc.board_sensors文件
rc.board_sensors文件作用是启动连接到板上的传感器。
-I 是 Internal I2C 启动,-X 是 External I2C 启动。
-a 后面是 I2C 地址。
# 内部 I2C 总线 BMP388 气压计
bmp388 -I -a 0x76 start
编译BootLoader和Firmware并烧录进自己的飞控板
在Firmware文件夹中输入命令即可对BootLoader和固件进行编译。
make UCAS_YanQi_bootloader
make UCAS_YanQi_default
没有安装烧录工具的先安装dfu-util烧录工具包。
sudo apt install dfu-util
按住飞控板上的BOOT键同时将USB线插入飞控板,进入DFU模式,运行命令即可进行BootLoader烧录。
dfu-util -a 0 --dfuse-address 0x08000000 -D ./build/UCAS_YanQi_bootloader/UCAS_YanQi_bootloader.bin
之后使用QGC安装UCAS_YanQi_default.px4飞控固件即可。
相关文章:
【DIY飞控板PX4移植】BARO模块BMP388气压计的PCB硬件设计和PX4驱动配置
BARO模块BMP388气压计的PCB硬件设计和PX4驱动配置 BMP388简介硬件设计封装原理图PCB设计引脚选择问题 PX4驱动配置飞控板的配置文件夹结构default.px4board文件nuttx-config/nsh/defconfig文件nuttx-config/include/board.h文件src/board_config.h文件src/i2c.cpp文件init/rc.b…...
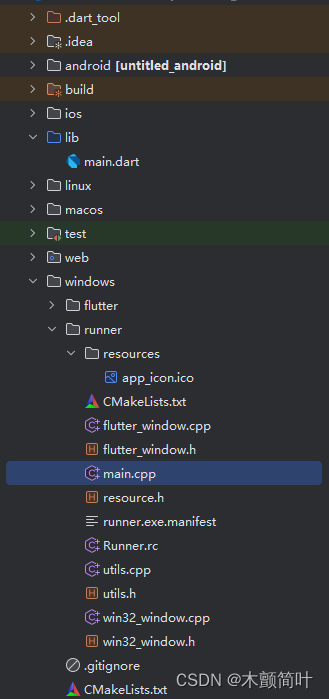
Flutter框架高阶——Window应用程序设置窗体窗口背景完全透明
文章目录 1.修改 main.cpp1)C 与 Win32 API2)EnableTransparency()3)中文注释 2.编写 Flutter 代码1)bitsdojo_window2)window_manager3)区别对比4)同时使用(1)设置初始化…...

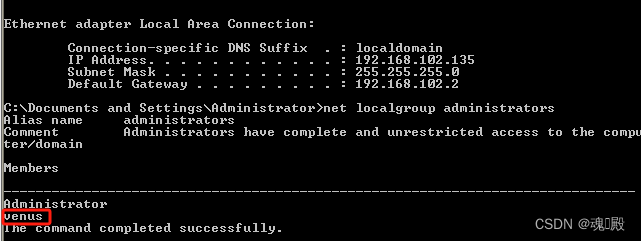
HJ39判断两个IP是否属于同一子网
提示:文章 文章目录 前言一、背景二、 2.1 2.2 总结 前言 HJ39判断两个IP是否属于同一子网 一、 代码: 第一版代码没有对掩码网络号进行处理。一开始对非法字段的理解就是value大于255。然后执行示例, 254.255.0.0 85.122.52.249 10.57.…...
opencv学习笔记(2)
设置鼠标回调函数 setMouseCallback(winname, callback, userdata) winname:窗口名字 callback:回调函数 userdata:传回callback中 callback(event, x, y, flags,userdata) event:鼠标事件 x: 鼠标的x坐标 y: 鼠标的y坐标 flags:鼠标键和组合键 userdata:setMouseCallback传回…...

分享vs code十大好用的插件
1.Chinese (Simplified) (简体中文) Language Pack for Visual Studio Code 将 VS Code 界面改成简体中文。 2.PDF Viewer 在VS Code 中打开 PDF文件。 3.TODO Highlight 这个扩展会突出显示您的待办事项注释,并提醒存在未完成的注释或任务。 该扩展附带了内…...

MySQL支持哪些特殊字符
MySQL支持多种特殊字符,这些字符在SQL语句中具有特定的含义,需要在使用时特别注意。以下是一些MySQL中的特殊字符及其相关信息: 引号: 单引号():用于定义字符串。如果字符串中包含单引号本身&…...

c语言中的宏是什么?
宏的定义及用途 C语言中的宏是一种预处理指令,它允许程序员定义一个名称,该名称可以代表一段代码或一个值。宏的主要用途是简化代码的编写,提高代码的可读性和可维护性,以及实现代码的重复利用。 宏的定义使用#define指令&#…...

采购信息记录标准编码范围维护以及如何开发获取编码范围
上图是配置的点,在这里可以获取到对应的编号范围以及对象名称 下面的话是官方就如何取编号的技术文档 SAP Help Portal...
渗透测试基础(四) MS08-067 漏洞攻击
1. 漏洞介绍 漏洞描述 Microsoft Windows Server服务RPC请求缓冲区溢出漏洞Windows的Server服务在处理特质RPC请求时存在缓冲区溢出漏洞,远程攻击者可以通过发送恶意的RPC请求触发这个溢出,导致完全入侵用户系统,以SYSTEM权限执行任意指令。…...

vmware 虚拟机保留数据扩展C盘
1,在默认安装系统的时候,VMWARE一般给C盘50G,很多人想着够用了,但是后面慢慢的安装各种大型软件,游戏,才发现,悔时已晚。 2,有很多人虚拟机其实就是拿来游戏多开,但是当…...

vscode cmake c++ include 设置
在这里设置编译器路径,include路径等等。 一个奇怪的现象是同一项目放在VS中可以cmake生成,并正常运行,但是放在VSCODE中cmake生成时会报错,如iostream、limits等头文件找不到。当在VS中运行执行完成调试后,在运行VSC…...
)
2024-06-19 高等数学(统计学和概率论-高等工科数学)
学习数学时,有效的笔记方法可以帮助你更好地理解和记忆概念、公式和解题技巧。下面是一个数学笔记的基本模本,你可以根据自己的需求进行调整: 1. **标题**:写上日期和课程名称,例如“2024-06-19 高等数学”。 2. **课…...
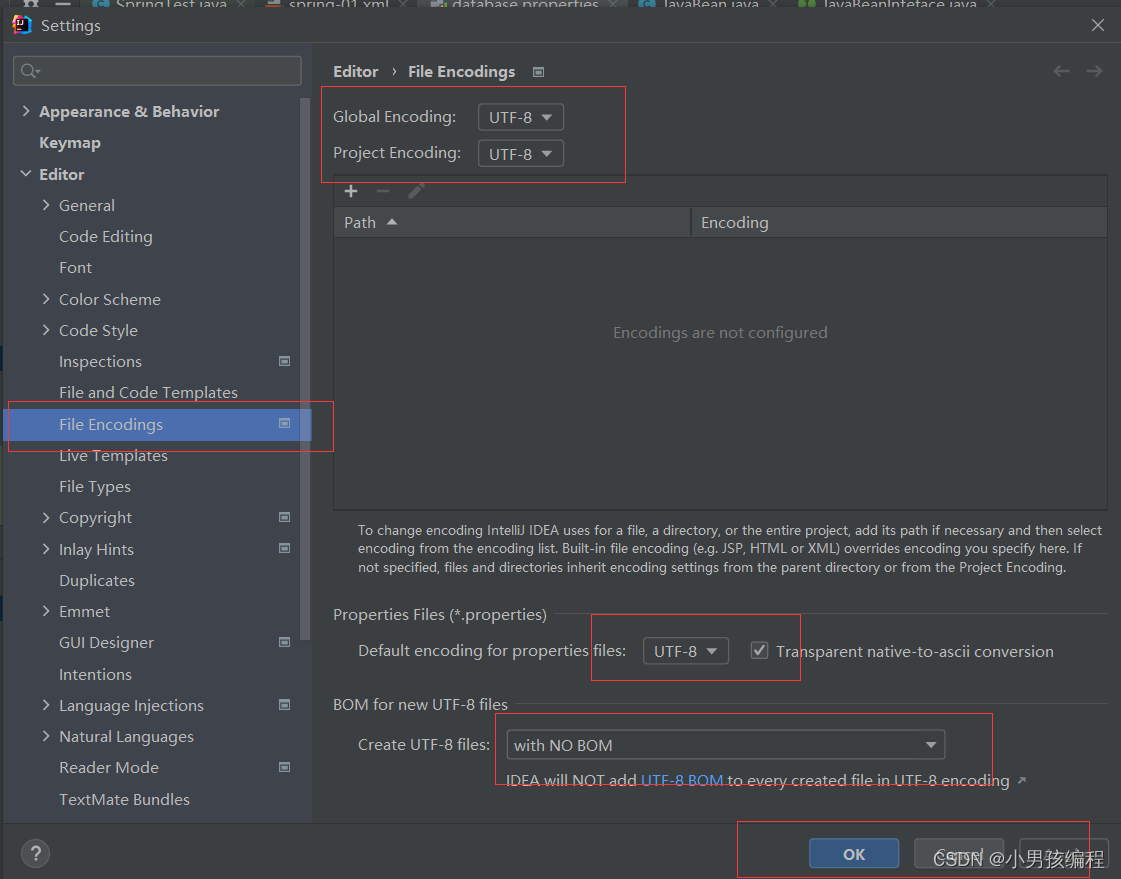
idea 创建properties文件,解决乱码
设置properties文件编码 点击file->Settings File Encodings->设置utf-8 重新创建.properties文件才生效...
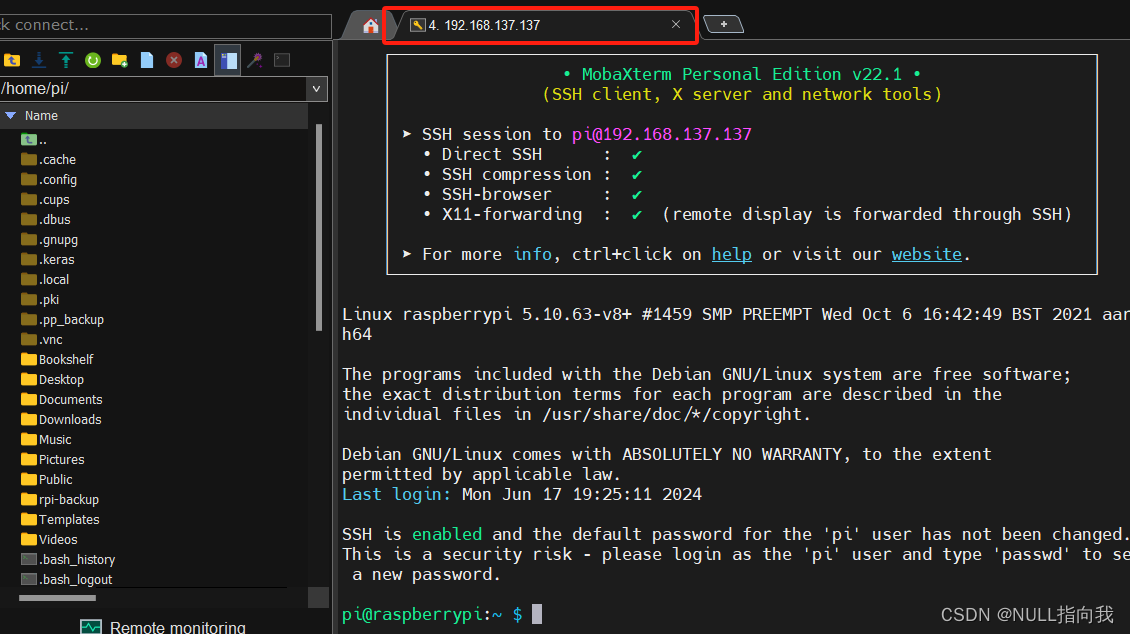
树莓派4B学习笔记11:PC端网线SSH连接树莓派_网线连接请求超时问题解决
今日继续学习树莓派4B 4G:(Raspberry Pi,简称RPi或RasPi) 本人所用树莓派4B 装载的系统与版本如下: 版本可用命令 (lsb_release -a) 查询: Opencv 版本是4.5.1: 今日学习使用网线连接树莓派,网线可以提供更…...

适合营销的叙事可视化
背景 数据可视化与数据故事化的差异和相似点,以及它们如何协同工作,将你的数据转化为清晰、简洁、可操作的信息,以便您的组织使用。 什么是数据可视化? 数据可视化通过图像传达信息——这是你所收集数据的视觉表示。通过提供原…...
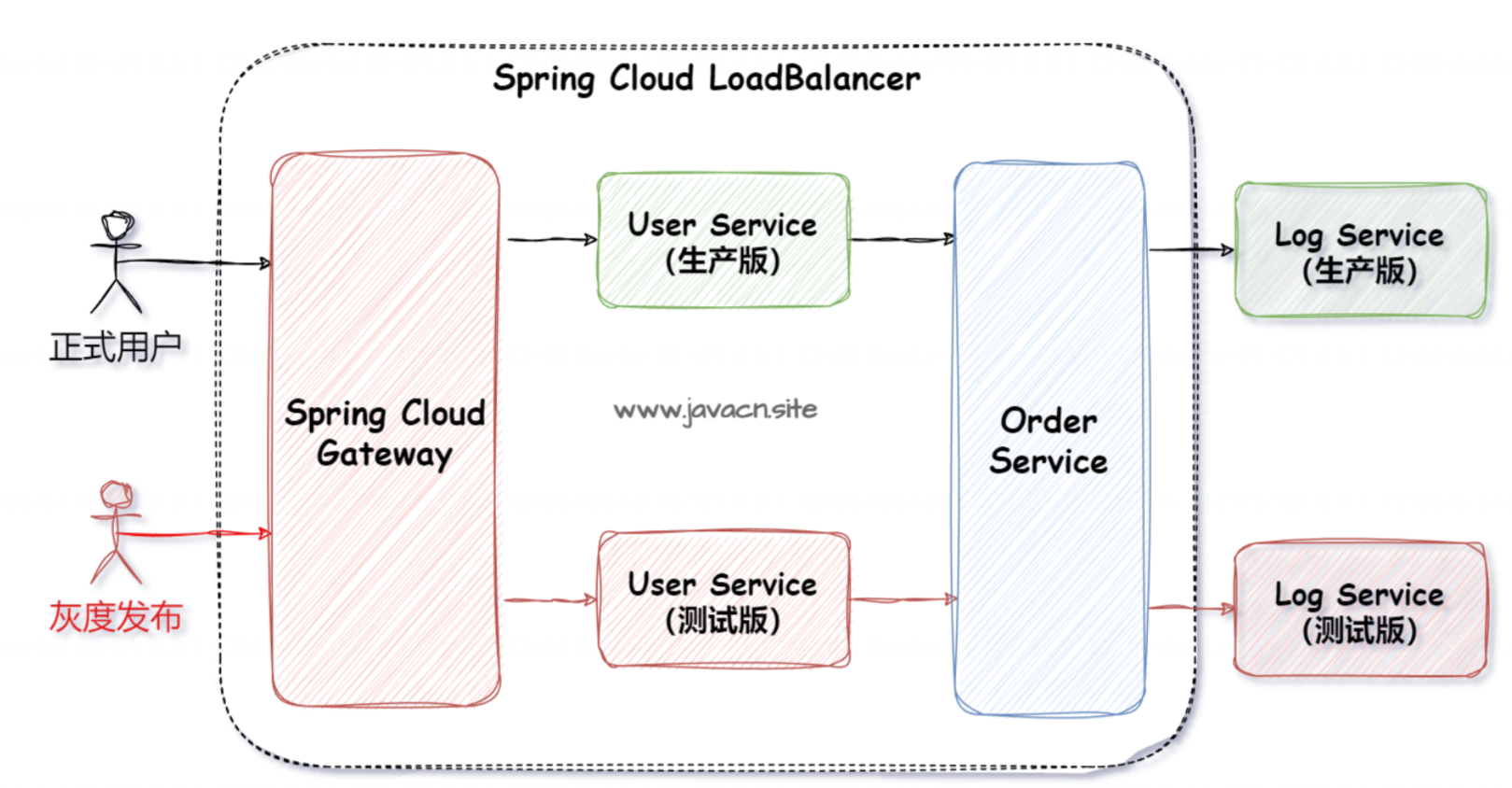
Spring Cloud全家桶(上)【Nacos、OpenFeign、LoadBalancer、GateWay、金丝雀灰色发布】
0.零基础入门微服务实战课 1.微服务和 Spring Cloud1.1 什么是微服务?1.2 什么是 Spring Cloud?1.3 微服务 VS Spring Cloud 2.为什么要学微服务?3.Spring Cloud 组件介绍1.什么是 Nacos?1.1 Nacos 功能1.1.1 配置中心1.1.2 注册中心 1.2 Na…...

GPRS与4G网络:技术差异与应用选择
在移动通信的发展历程中,GPRS(General Packet Radio Service)和4G(Fourth-Generation)技术都扮演着举足轻重的角色。虽然两者都旨在提供无线数据传输服务,但在数据传输速率、延迟和覆盖范围等方面ÿ…...
【Spring】1. Maven项目管理
📚博客主页:爱敲代码的小杨. ✨专栏:《Java SE语法》 | 《数据结构与算法》 | 《C生万物》 |《MySQL探索之旅》 |《Web世界探险家》 ❤️感谢大家点赞👍🏻收藏⭐评论✍🏻,您的三连就是我持续更…...

工业制造领涉及的8大常见管理系统,如mes、scada、aps、wms等
在工业生产和制造领域有一些常见的管理系统,很多小伙伴分不清,这次大美B端工场带领大家了解清楚。 MES(Manufacturing Execution System,制造执行系统): MES是一种用于监控、控制和优化生产过程的软件系统…...

Lianwei 安全周报|2024.06.17
新的一周又开始了,以下是本周「Lianwei周报」,我们总结推荐了本周的政策/标准/指南最新动态、热点资讯和安全事件,保证大家不错过本周的每一个重点! 政策/标准/指南最新动态 01 IDC:2024 第一季度中国安全硬件市场规模…...

Cursor编辑器使用统计工具:量化开发效率与AI辅助深度分析
1. 项目概述:一个为开发者量身定制的Cursor使用统计工具如果你和我一样,日常开发重度依赖Cursor这款AI代码编辑器,那你肯定也好奇过:我到底有多“卷”?每天在编辑器里花了多少时间?最常用的功能是哪些&…...

数据科学家压力管理的艺术
原文:towardsdatascience.com/the-art-of-stress-management-as-a-data-scientist-e49981cd2aa7 https://github.com/OpenDocCN/towardsdatascience-blog-zh-2024/raw/master/docs/img/96cbf6100471444654cae4816944e9b1.png Photo by Johnson Wang on Unsplash 数…...

三步轻松上手:BilldDesk Pro开源远程桌面控制工具完整指南
三步轻松上手:BilldDesk Pro开源远程桌面控制工具完整指南 【免费下载链接】billd-desk 基于Vue3 WebRTC Nodejs Flutter搭建的远程桌面控制、游戏串流 项目地址: https://gitcode.com/gh_mirrors/bi/billd-desk 如果你正在寻找一款功能强大且完全免费的跨…...

BG3模组管理器版本兼容性终极指南:告别游戏崩溃和模组失效
BG3模组管理器版本兼容性终极指南:告别游戏崩溃和模组失效 【免费下载链接】BG3ModManager A mod manager for Baldurs Gate 3. This is the only official source! 项目地址: https://gitcode.com/gh_mirrors/bg/BG3ModManager BG3模组管理器是《博德之门3》…...

从DO-178标准演进看多核系统耦合分析:隐式要求显式化与可视化实践
1. 从文学课堂到工程标准:隐式与显式的分野在大学里,我的文学课老师总是不厌其烦地强调“隐式”与“显式”含义的区别。理解这种区别,是读懂一部小说深层隐喻、体会作者言外之意的关键。当时觉得这不过是文学分析的技巧,直到我踏入…...

openpilot终极指南:从开源机器人操作系统到300+车型自动驾驶辅助实现
openpilot终极指南:从开源机器人操作系统到300车型自动驾驶辅助实现 【免费下载链接】openpilot openpilot is an operating system for robotics. Currently, it upgrades the driver assistance system on 300 supported cars. 项目地址: https://gitcode.com/G…...

3PEAK思瑞浦 TPA2642-SO1R SOP8 运算放大器
特性 供电电压:3V至36V 偏移电压:2mV(最大值) 差分输入电压范围至电源轨,可作为比较器工作 带宽:1.5MHz,斜率:0.5V/us 输入轨至-Vs,无内部ESD二极管至Vs .低1/f噪声:在10Hz时为50nV/Hz 高PSRR:100kHz时为60dB 开关电源开启和关闭期间无显著输…...

实在Agent实测:解决采购合同审核流程冗长与原材料交付周期拉长的架构之道
大家好,我是企业架构师老王。站在2026年5月这个时间节点回看,全球供应链的复杂程度已远超三年前的预判。近期我在为几家制造型企业做数字化诊断时发现,一个幽灵般的困境正在吞噬企业的利润:采购合同审核流程冗长,直接导…...

终极IDM试用重置指南:三步实现无限续期的免费解决方案
终极IDM试用重置指南:三步实现无限续期的免费解决方案 【免费下载链接】idm-trial-reset Use IDM forever without cracking 项目地址: https://gitcode.com/gh_mirrors/id/idm-trial-reset IDM Trial Reset是一款专为Internet Download Manager用户设计的实…...
)
ArcGIS标注进阶:手把手教你搞定分式标注和河流左斜体(附完整表达式)
ArcGIS标注进阶:分式标注与河流左斜体实战指南 在地图制图领域,专业标注是提升可视化效果的关键环节。许多GIS工程师在进行水文地质制图时,常遇到分式标注格式混乱、河流名称无法实现标准左斜体等痛点问题。本文将彻底解决这些标注难题&#…...