三体到底是啥?用Python跑一遍就明白了
文章目录
- 拉格朗日方程
- 推导方程组
- 微分方程算法化
- 求解+画图
- 动图绘制
温馨提示,只想看图的画直接跳到最后一节
拉格朗日方程
此前所做的一切三体和太阳系的动画,都是基于牛顿力学的,而且直接对微分进行差分化,从而精度非常感人,用不了几年就得撞一起去。
为了给三体人提供一个更加有价值的推导,这次通过求解拉格朗日方程的数值解来实现。
首先假设三个质点的质量分别为m1,m2,m3m_1, m_2, m_3m1,m2,m3,坐标为x⃗1,x⃗2,x⃗3\vec x_1, \vec x_2, \vec x_3x1,x2,x3,质点速度可以表示为x⃗˙\dot{\vec x}x˙。假设三体在二维平面上运动,则第iii个质点的动能为
Ti=12mi(x˙i2+y˙i2)T_i=\frac{1}{2}m_i(\dot x_i^2+\dot y_i^2) Ti=21mi(x˙i2+y˙i2)
引力势能为−Gmimjrij-G\frac{m_im_j}{r_{ij}}−Grijmimj,其中GGG为万有引力常量,rijr_{ij}rij为质点i,ji,ji,j之间的距离,则系统的拉格朗日量为
L=∑i12mi(x˙i2+y˙i2)−∑i≠jGmimj∥x⃗i−x⃗j∥L=\sum_i\frac{1}{2}m_i(\dot x_i^2+\dot y_i^2)-\sum_{i\not=j}G\frac{m_im_j}{\Vert\vec x_i-\vec x_j\Vert} L=i∑21mi(x˙i2+y˙i2)−i=j∑G∥xi−xj∥mimj
有了拉格朗日量,将其带入拉格朗日方程
ddt∂L∂x˙i−∂L∂xi=0\frac{\text d}{\text dt}\frac{\partial L}{\partial\dot x_i}-\frac{\partial L}{\partial x_i}=0 dtd∂x˙i∂L−∂xi∂L=0
就可以得到拉格朗日方程组。
推导方程组
对于三体系统而言,总计有3个粒子,每个粒子有x,yx,yx,y两个自由度,也就是说最后会得到6组方程。考虑到公式推导过程中可能会出现错误,所以下面采用sympy来进行公式推导。
首先定义符号变量
from sympy import symbols
from sympy.physics.mechanics import dynamicsymbols
m = symbols('m1:4')
x = dynamicsymbols('x1:4')
y = dynamicsymbols('y1:4')
接下来,需要构造系统的拉格朗日量LLL,其实质是系统的动能减去势能,对于上面构建的三体系统而言,动能和势能可分别表示为
计算每个质点的动能和势能。动能是由速度决定的,而速度是由位置对时间的导数决定的。我们可以用 sympy 的 diff 函数来求导:
from sympy import diff
# 此为速度的平方
v2 = [diff(x[i],t)**2 + diff(y[i])**2 for i in range(3)]
T = 0
for i in range(3):T += m[i]*v2[i]/2
势能是由万有引力决定的,而万有引力是由两个质点之间的距离决定的。我们可以用 sympy 的 sqrt 函数来求距离:
from sympy import sqrt,cos
G = symbols('G') # 引力常数
ijs = [(0,1), (0,2),(1,2)]
dij = [sqrt((x[i]-x[j])**2+(y[i]-y[j])**2) for i,j in ijs]
U = 0
for k in range(3):i,j = ijs[k]U -= G*m[i]*m[j]/dij[k]
有了动能和势能,就可以愉快地求拉格朗日量了,有了拉格朗日量,就可以列拉格朗日方程了
L=T−UdLdxi−ddt∂L∂x˙iL = T - U\\ \frac{\text dL}{\text dx_i}-\frac{\text d}{\text dt}\frac{\partial L}{\partial \dot x_i} L=T−UdxidL−dtd∂x˙i∂L
三个粒子的每一个坐标维度,都可以列出一组拉格朗日方程,所以总共有6个拉格朗日方程组
from sympy import solve
L = T - U
eqLag = lambda x : diff(L, x)-diff(diff(L, diff(x, t)), t)
# 拉格朗日方程组
eqs = [eqLag(xi) for xi in x+y]
记xij=xi−xj,yij=yi−yjx_{ij}=x_i-x_j, y_{ij}=y_i-y_jxij=xi−xj,yij=yi−yj,则
−Gm1m2x12(x122+y122)32+−Gm1m3x13(x132+y132)32−m1d2dt2x1=0Gm1m2x12(x122+y122)32+−Gm2m3x23(x232+y232)32−m2d2dt2x2=0Gm1m3x13(x132+y132)32+Gm2m3x23(x232+y232)32−m3d2dt2x3=0−Gm1m2y12(x122+y122)32+−Gm1m3y13(x132+y132)32−m1d2dt2y1=0Gm1m2y12(x122+y122)32+−Gm2m3y23(x232+y232)32−m2d2dt2y2=0Gm1m3y13(x132+y132)32+Gm2m3y23(x232+y232)32−m3d2dt2y3=0\frac{-G m_1 m_2x_{12}}{\left(x_{12}^{2} + y_{12}^{2}\right)^{\frac{3}{2}}} + \frac{-G m_1 m_{3}x_{13}}{\left(x_{13}^{2} + y_{13}^{2}\right)^{\frac{3}{2}}} - m_1 \frac{d^{2}}{d t^2} x_1=0\\ \frac{G m_1 m_2 x_{12}}{\left(x_{12}^{2} + y_{12}^{2}\right)^{\frac{3}{2}}} + \frac{-G m_2 m_{3}x_{23}}{\left(x_{23}^{2} + y_{23}^{2}\right)^{\frac{3}{2}}} - m_2 \frac{d^{2}}{d t^2} x_2=0\\ \frac{G m_1 m_{3} x_{13}}{\left(x_{13}^{2} + y_{13}^{2}\right)^{\frac{3}{2}}} + \frac{G m_2 m_{3} x_{23}}{\left(x_{23}^{2} + y_{23}^{2}\right)^{\frac{3}{2}}} - m_{3} \frac{d^{2}}{d t^2} x_{3}=0\\ \frac{-G m_1 m_2 y_{12}}{\left(x_{12}^{2} + y_{12}^{2}\right)^{\frac{3}{2}}} + \frac{-G m_1 m_{3} y_{13}}{\left(x_{13}^{2} + y_{13}^{2}\right)^{\frac{3}{2}}} - m_1 \frac{d^{2}}{d t^2} y_1=0\\ \frac{G m_1 m_2 y_{12}}{\left(x_{12}^{2} + y_{12}^{2}\right)^{\frac{3}{2}}} + \frac{-G m_2 m_{3}y_{23}}{\left(x_{23}^{2} + y_{23}^{2}\right)^{\frac{3}{2}}} - m_2 \frac{d^{2}}{d t^2} y_2=0\\ \frac{G m_1 m_{3} y_{13}}{\left(x_{13}^{2} + y_{13}^{2}\right)^{\frac{3}{2}}} + \frac{G m_2 m_{3} y_{23}}{\left(x_{23}^{2} + y_{23}^{2}\right)^{\frac{3}{2}}} - m_{3} \frac{d^{2}}{d t^2} y_{3}=0\\ (x122+y122)23−Gm1m2x12+(x132+y132)23−Gm1m3x13−m1dt2d2x1=0(x122+y122)23Gm1m2x12+(x232+y232)23−Gm2m3x23−m2dt2d2x2=0(x132+y132)23Gm1m3x13+(x232+y232)23Gm2m3x23−m3dt2d2x3=0(x122+y122)23−Gm1m2y12+(x132+y132)23−Gm1m3y13−m1dt2d2y1=0(x122+y122)23Gm1m2y12+(x232+y232)23−Gm2m3y23−m2dt2d2y2=0(x132+y132)23Gm1m3y13+(x232+y232)23Gm2m3y23−m3dt2d2y3=0
微分方程算法化
接下来就要调用Python的odeint来计算这个微分方程组的数值解,odeint的调用方法大致为odeint(func, y, t, args),其中func是一个函数,这个函数必须为func(y,t,...),且返回值为dydt\frac{\text dy}{\text dt}dtdy。
为此,需要将上述方程组再行拆分,以消去其中的二次导数,以x1x_1x1为例,令u1=dx1dtu_1=\frac{\text dx_1}{\text dt}u1=dtdx1,则此方程变为方程组
x˙1(t)=u1(t)u˙1(t)=−Gm1m2x12(x122+y122)32+−Gm1m3x13(x132+y132)32\begin{aligned} \dot x_1(t)&=u_1(t)\\ \dot u_1(t)&= \frac{-G m_1 m_2x_{12}}{\left(x_{12}^{2} + y_{12}^{2}\right)^{\frac{3}{2}}} + \frac{-G m_1 m_{3}x_{13}}{\left(x_{13}^{2} + y_{13}^{2}\right)^{\frac{3}{2}}}\\ \end{aligned} x˙1(t)u˙1(t)=u1(t)=(x122+y122)23−Gm1m2x12+(x132+y132)23−Gm1m3x13
由于三体系统中有3个粒子,共6个独立变量,所以要列12个方程。记u(t)=textdxdt,v(t)=dydtu(t)=\frac{text dx}{\text dt}, v(t)=\frac{\text dy}{\text dt}u(t)=dttextdx,v(t)=dtdy,则odeint输入的y的形式为
[x1,x2,x3,y1,y2,y3,u1,u2,u3,v1,v2,v3][x_1, x_2, x_3, y_1, y_2, y_3, u_1, u_2, u_3, v_1, v_2, v_3] [x1,x2,x3,y1,y2,y3,u1,u2,u3,v1,v2,v3]
从而func的具体形式为
import numpy as np
dxy = lambda x,y : np.sqrt(x**2+y**2)**(3/2)
def triSys(Y, t, m, G):jk = [(1,2),(0,2),(0,1)]x,y = Y[:3], Y[3:6]u,v = Y[6:9], Y[9:]du, dv = [], []for i in range(3):j, k = jk[i]xji, xki = x[j]-x[i], x[k]-x[i]yji, yki = y[j]-y[i], y[k]-y[i]dji, dki = dxy(xji, yji), dxy(yji, yki)mji, mki = G*m[i]*m[j], G*m[i]*m[k]du.append(mji*xji/dji + mki*xki/dki)dv.append(mji*yji/dji + mki*yki/dki)dydt = [*u, *v, *du, *dv]return dydt
求解+画图
接下来就是见证奇迹的时刻,首先创建一个随机的起点,作为三体运动的初值,然后带入开整就完事儿了
from scipy.integrate import odeint
np.random.seed(42)
y0 = np.random.rand(12)
m = np.random.rand(3)
t = np.linspace(0, 20, 1001)
sol = odeint(triSys, y0, t, args=(m, 1))
然后绘制一下这三颗星的轨迹
import matplotlib.pyplot as plt
plt.plot(sol[:,0], sol[:,3])
plt.plot(sol[:,1], sol[:,4])
plt.plot(sol[:,2], sol[:,5])
plt.show()

光是看这个轨迹就十分惊险了有木有。
如果把其中的第一颗星作为坐标原点,那么另外两颗星的轨迹大致为
plt.plot(sol[:,1]-sol[:,0], sol[:,4]-sol[:,3])
plt.plot(sol[:,2]-sol[:,0], sol[:,5]-sol[:,3])
plt.scatter([0],[0], c='g', marker='*')
plt.show()
结果为

动图绘制
最后,以中间这颗星为原点,绘制一下另外两颗星运动的动态过程
import matplotlib.animation as animation fig = plt.figure(figsize=(9,4))
ax = fig.add_subplot(xlim=(-1.8,1.8),ylim=(-1.8,1.5))
ax.grid()traces = [ax.plot([],[],'-',lw=0.5)[0] for _ in range(2)]
pts = [ax.plot([],[] ,marker='*')[0] for _ in range(2)]
ax.plot([0],[0], marker="*", c='r')X1 = sol[:,1]-sol[:,0]
Y1 = sol[:,4]-sol[:,3]
X2 = sol[:,2]-sol[:,0]
Y2 = sol[:,5]-sol[:,3]def animate(n):traces[0].set_data(X1[:n], Y1[:n])traces[1].set_data(X2[:n], Y2[:n])pts[0].set_data([X1[n], Y1[n]])pts[1].set_data([X2[n], Y2[n]])return traces + ptsani = animation.FuncAnimation(fig, animate, range(1000), interval=10, blit=True)
ani.save('tri.gif')
相关文章:
三体到底是啥?用Python跑一遍就明白了
文章目录拉格朗日方程推导方程组微分方程算法化求解画图动图绘制温馨提示,只想看图的画直接跳到最后一节拉格朗日方程 此前所做的一切三体和太阳系的动画,都是基于牛顿力学的,而且直接对微分进行差分化,从而精度非常感人…...

Golang-Hello world
目录 安装 Go(如果尚未安装) 编写Hello world 使用Golang的外部包 自动下载需要的外部包...

this指针C++
🐶博主主页:ᰔᩚ. 一怀明月ꦿ ❤️🔥专栏系列:线性代数,C初学者入门训练,题解C,C的使用文章 🔥座右铭:“不要等到什么都没有了,才下定决心去做” …...
SpringBoot+WebSocket实时监控异常
# 写在前面此异常非彼异常,标题所说的异常是业务上的异常。最近做了一个需求,消防的设备巡检,如果巡检发现异常,通过手机端提交,后台的实时监控页面实时获取到该设备的信息及位置,然后安排员工去处理。因为…...
Baumer工业相机堡盟相机如何使用自动曝光功能(自动曝光优点和行业应用)(C++)
项目场景 Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。 Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具…...
HTML、CSS学习笔记7(移动适配:rem、less)
一、移动适配 rem:目前多数企业在用的解决方案vw / vh:未来的解决方案 1.rem(单位) 1.1使用rem单位设置尺寸 px单位或百分比布局可以实现吗? ————不可以 网页的根字号——HTML标签 1.2.rem移动适配 写法&#x…...
STM32感应开关盖垃圾桶
目录 项目需求 项目框图 编辑 硬件清单 sg90舵机介绍及实战 sg90舵机介绍 角度控制 SG90舵机编程实现 超声波传感器介绍及实战 超声波传感器介绍 超声波编程实战 项目设计及实现 项目需求 检测靠近时,垃圾桶自动开盖并伴随滴一声,2秒后关盖…...

进程跟线程的区别
进程跟线程的区别 文章目录进程跟线程的区别前言一.什么线程二.线程与进程的联系三.线程与进程有什么不同前言 现代所有计算机都能同时做几件事情,当一个用户程序正在运行时,计算机还能同时读取磁盘,并向屏幕打印输出正文.在一个多道操作程序中,cpu由一道程序向另外一道程的切…...

[ICLR 2016] Unsupervised representation learning with DCGANs
目录 IntroductionModel ArchitectureReferencesIntroduction 作者提出了用 CNN 搭建 GAN,使得 GAN 训练更加稳定的一系列准则,并将满足这些设计理念的模型称为 DCGANs (Deep Convolutional GANs). 此外,作者将 trained discriminators 用于图像分类任务,相比于其他无监督算…...

QT编程从入门到精通之十五:“第五章:Qt GUI应用程序设计”之“5.1 UI文件设计与运行机制”之“5.1.2 项目管理文件”
目录 第五章:Qt GUI应用程序设计 5.1 UI文件设计与运行机制 5.1.2 项目管理文件 第五章:Qt GUI应用程序设计 在“Qt 程序创建基础”上,本章将继续深入地介绍Qt Creator设计GUI应用程序的方法...

基于Three.js和MindAR实现的网页端WebAR人脸识别追踪功能的京剧换脸Demo(含源码)
前言 近段时间一直在玩MindAR的功能,之前一直在弄图片识别追踪的功能,发现其强大的功能还有脸部识别和追踪的功能,就基于其面部网格的例子修改了一个国粹京剧的换脸程序。如果你不了解MindAR的环境配置可以先参考这篇文章:基于Mi…...

动态规划思路
拉勾教育版权所有:https://kaiwu.lagou.com/course/courseInfo.htm?courseId3 动态规划思路 1.最优子结构 2.重复计算子机构 3.依靠递归,层层向上传值,所以编程时初始化子结构很重要 动态规划步骤 1.判断动态规划的类型 1.线性规划 >&…...

HTTPS关键词语解释和简单通讯流程
1、 什么是HTTPS HTTPS是基于HTTP的上层添加了一个叫做TLS的安全层,对数据的加密等操作都是在这个安全层中进行处理的,其底层还是应用的HTTP。 2、 什么是对称加密; 加密和解密都是用同一个秘钥 3、 什么是非对称加密; 加密和…...

“前端开发中的三种定时任务及其应用“
前端定时任务是指在一定时间间隔内,自动执行指定的操作或函数。在前端开发中,定时任务被广泛应用于诸如数据更新、定时提醒、定时刷新页面等方面。在本文中,我们将介绍前端中常见的三种定时任务,分别是 setTimeout、setInterval 和…...
| 机考必刷)
华为OD机试题 - 猜字谜(JavaScript)| 机考必刷
更多题库,搜索引擎搜 梦想橡皮擦华为OD 👑👑👑 更多华为OD题库,搜 梦想橡皮擦 华为OD 👑👑👑 更多华为机考题库,搜 梦想橡皮擦华为OD 👑👑👑 华为OD机试题 最近更新的博客使用说明本篇题解:猜字谜题目输入输出描述备注示例一输入输出示例二输入输出思路C…...
python@pyside样式化
文章目录refWidget类创建样式化文件qss引用样式并启动应用ref Styling the Widgets Application - Qt for PythonQt Style Sheets Reference | Qt Widgets 5.15.12 Widget类创建 创建一个简单界面(菜单主要内容)它们是水平布局 主要内容包括一段文本和一个按钮,它们是垂直布…...
)
C++经典15道面试题目(文末含大题)
今天给大家找了几个C面试里很有可能被问的哦,赶紧收藏下来去背!!! 目录 1)C中有malloc/free,为什么还需要new/delete? 2)C中explicit关键字的作用? 3)C中static关键字的作用&a…...

自动计算30天内的股价最高价源代码
我可以回答这个问题。您可以使用以下代码来计算30天内股价的最高价: 复制 import pandas as pd import yfinance as yf # 设置股票代码和日期范围 symbol "AAPL" start_date "2021-01-01" end_date "2021-06-30" # 获取股票…...

国外SEO升级攻略!一看就懂!
SEO是搜索引擎优化的缩写,它是指通过优化网站内容和结构,提升网站在搜索引擎中的排名,从而获得更多的有价值的流量。 而关键词研究和选择是SEO优化中最基础也是最关键的环节,它决定了网站将面向哪些用户、哪些关键词和词组将被优…...
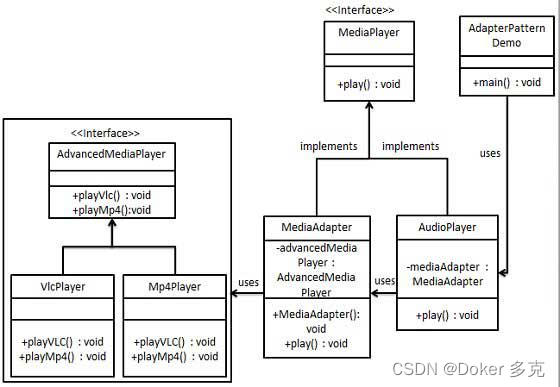
设计模式—适配器模式
适配器模式(Adapter Pattern)是作为两个不兼容的接口之间的桥梁。这种类型的设计模式属于结构型模式,它结合了两个独立接口的功能。这种模式涉及到一个单一的类,该类负责加入独立的或不兼容的接口功能。举个真实的例子,…...

【紧急通告】DeepSeek-R1毒性分类器存在语境盲区?3小时内验证并热修复的4种API级补丁
更多请点击: https://intelliparadigm.com 第一章:【紧急通告】DeepSeek-R1毒性分类器存在语境盲区?3小时内验证并热修复的4种API级补丁 近期社区报告指出,DeepSeek-R1毒性分类器在处理嵌套反讽、多轮对话上下文拼接及跨语言混合…...

流式Markdown解析器:实现实时渲染与性能优化的核心技术
1. 项目概述:一个实时渲染的Markdown流式解析器如果你经常需要处理动态生成的Markdown内容,比如从API接口实时获取、从数据库流式读取,或者构建一个支持用户边输入边预览的编辑器,那你一定遇到过这样的痛点:传统的Mark…...
)
8K 剪辑卡皇之争:RTX 4090 vs A6000 大显存显卡选型深度指南(下)
在上一篇文章中,我们探讨了 8K 视频剪辑对硬件的整体需求,并初步对比了 RTX 4090 和 RTX A6000 在理论性能上的差异。本文将深入分析实际剪辑过程中,大显存显卡对工作流程的影响,尤其是在处理复杂特效、多层合成以及高码率素材时&…...

从锡疫到无铅焊料失效:材料环境可靠性设计实战解析
1. 从拿破仑的纽扣说起:材料失效背后的工程警示在电子工程领域,我们每天都在与材料打交道。从PCB上的焊点,到芯片内部的金属互连,再到外壳的塑料,材料的可靠性直接决定了产品的成败。几年前,当整个行业因Ro…...
)
GDB调试实战:如何像本地变量一样轻松查看函数参数和结构体成员(附常用命令清单)
GDB调试实战:像本地变量一样高效查看函数参数与复杂数据结构 调试大型C/C项目时,最令人头疼的莫过于面对层层嵌套的函数调用和包含数十个成员的结构体。传统调试方式往往让我们陷入内存地址的泥潭,而GDB提供的诸多高级功能可以彻底改变这一局…...

5分钟掌握中兴光猫配置解密:解决网络维护难题的终极方案
5分钟掌握中兴光猫配置解密:解决网络维护难题的终极方案 【免费下载链接】ZET-Optical-Network-Terminal-Decoder 项目地址: https://gitcode.com/gh_mirrors/ze/ZET-Optical-Network-Terminal-Decoder 你是否曾经面对加密的中兴光猫配置文件束手无策&#…...

壹:烧录Linux系统
名词解析:OTG:On-The-Go,含义:OTG 是一种 USB 的扩展功能,允许设备(如手机、开发板)在没有主机(如电脑)的情况下,既可以作为 USB 主机(Host&#…...

意义如何保持活性:一项基于岐金兰哲学体系的系统性阐释
意义如何保持活性:一项基于岐金兰哲学体系的系统性阐释导论:一座理论大厦的蓝图本文旨在对岐金兰哲学体系进行系统性阐释。这一体系围绕一个核心问题展开:意义如何在系统中保持活性,而非走向僵死?这一追问看似抽象&…...

Naftis架构设计原理:从Golang后端到React前端的完整技术栈
Naftis架构设计原理:从Golang后端到React前端的完整技术栈 【免费下载链接】naftis An awesome dashboard for Istio built with love. 项目地址: https://gitcode.com/gh_mirrors/na/naftis Naftis是一款专为Istio服务网格设计的现代化Web仪表板,…...

Apache Arrow图像数据处理终极指南:如何构建高性能计算机视觉应用
Apache Arrow图像数据处理终极指南:如何构建高性能计算机视觉应用 【免费下载链接】arrow Apache Arrow is a multi-language toolbox for accelerated data interchange and in-memory processing 项目地址: https://gitcode.com/gh_mirrors/arrow13/arrow …...