视觉SLAM14精讲——相机与图像3.3
视觉SLAM14精讲
- 三维空间刚体运动1.0
- 三维空间刚体运动1.1
- 三维空间刚体运动1.2
- 李群与李代数2.1
- 相机与图像3.1
- 相机与图像3.2
视觉SLAM14精讲——相机与图像3.3
- 视觉SLAM14精讲
- 相机投影流程
- 双目相机模型
相机投影流程
至此,有关相机三维刚体变换的所有因素已经汇集。书中对完整的投影过程做了总结。其中主要是将相机投影到世界坐标系。这里我们更进一步,以相机投影到另一个相机为目标,完整推理一遍其中的数学过程,加深对空间的理解。
完整的投影流程如下:
p 2 d l ⇌ K l K l − 1 1 Z l P d i s t o r t e d l ⇌ d i s t o r t u n d i s t o r t 1 Z l P 3 d l ⇌ 1 Z l × Z l P 3 d l ⇌ T − 1 ⋅ T ⋅ P 3 d r . . . p^l_{2d} \xrightleftharpoons[K_l]{K_l^{-1}} \frac{1}{Z^l} P^l_{distorted} \xrightleftharpoons[distort]{undistort} \frac{1}{Z^l} P^l_{3d} \xrightleftharpoons[\frac{1}{Z^l}]{\times Z^l} P^l_{3d} \xrightleftharpoons[ T^{-1} \cdot ]{T \cdot } P^r_{3d} \quad ... p2dlKl−1 KlZl1Pdistortedlundistort distortZl1P3dl×Zl Zl1P3dlT⋅ T−1⋅P3dr...
上式中,左右相机记为上标 l l l和 r r r。 Z Z Z是该点图像坐标对应的深度值。 K K K是内参。 T T T是变换, 等价于左乘旋转矩阵加平移矩阵 R ⋅ ( ⋅ ) + t R \cdot (\cdot) + t R⋅(⋅)+t。 p p p是2D像素点, P P P是3D点云。
要点:
- 这个式子右侧被省略了。以左乘 T T T为对称轴,右侧和左侧是对称的操作,因此这个式子只需要记忆一半。
- 左右的深度值是带下标的,因为左右看到物体的距离不是等价的。
- 左右的内参也分别带下标。 即便左右目是型号一致的两个相机,内参和畸变参数也会不同。
- 如果上式描述了随时间变化位姿的相机,则左右两侧 K K K和 D D D等价。
- 如果你考虑过这个模型, 你会发现他其实可以是双目相机深度的左右转换。 T T T即外参。
当讨论外参的时候,指的就是 T T T或成对的 R , t R, t R,t。一些工程项目中,可能只需要其中一两个参数,但是项目人员仍然将其称为外参。你只需要知道他的本质是外参中的一部分。此外,一定有两个标定的目标出现在讨论话题内, 无论是两个传感器,还是世界坐标系相对一个传感器,外参一定形容的是两个对象之间的空间变换关系。经常有人跟我要外参,而不说明外参所指的另一个对象是什么,让人一头雾水。
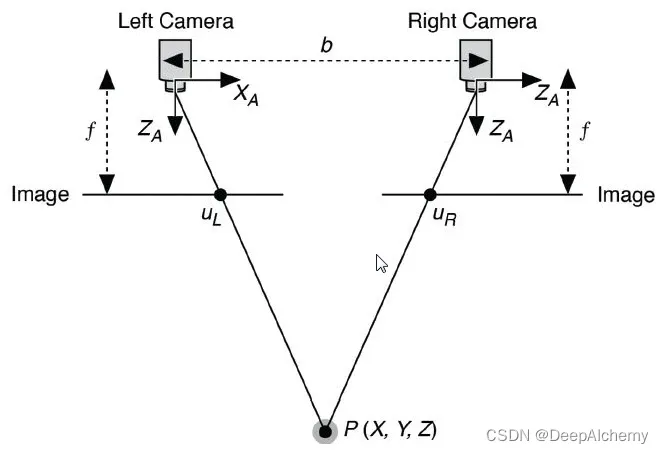
双目相机模型
双目相机通过块匹配进行视差估计,然后通过下式计算深度:
d e p t h = f o c u s ∗ b a s e l i n e d i s p a r i t y depth = \frac{focus * baseline}{disparity} depth=disparityfocus∗baseline
式中, d i s p r a i t y dispraity dispraity是视觉计算获得的视差,与彩色图像的分辨率一一对应。OpenCV中有块匹配的具体算法实现,常用的传统算法SGBM。通过构建sgbm对象进行视差的计算。
cv::StereoSGBM sgbm; sgbm.preFilterCap = 63; int SADWindowSize=11; int cn = 1; sgbm.SADWindowSize = SADWindowSize > 0 ? SADWindowSize : 3; sgbm.P1 = 4*cn*sgbm.SADWindowSize*sgbm.SADWindowSize; sgbm.P2 = 32*cn*sgbm.SADWindowSize*sgbm.SADWindowSize; sgbm.minDisparity = 0; sgbm.numberOfDisparities = 32; sgbm.uniquenessRatio = 10; sgbm.speckleWindowSize = 100; sgbm.speckleRange = 32; sgbm.disp12MaxDiff = 1; sgbm(left , right , left_disp_); sgbm(right, left , right_disp_);
该算法对cpu计算量的压力很大,因此建议降采样计算。然而这种方案不能应对纹理缺乏的场景,有厂商,例如intel,会采用红外结构光发射器。通过红外摄像头对缺乏纹理区域的斑点进行匹配,然后生成深度。然后在通过文章开头讲的外参变换过程,将两个红外摄像头产生的深度数据投影到彩色摄像头上。配合彩色摄像头的颜色,此时深度就能够进行立体建模。
相关文章:
视觉SLAM14精讲——相机与图像3.3
视觉SLAM14精讲 三维空间刚体运动1.0三维空间刚体运动1.1三维空间刚体运动1.2李群与李代数2.1相机与图像3.1相机与图像3.2 视觉SLAM14精讲——相机与图像3.3 视觉SLAM14精讲相机投影流程双目相机模型 相机投影流程 至此,有关相机三维刚体变换的所有因素已经汇集。…...

【路径规划】基于粒子群结合遗传算法实现机器人栅格地图路径规划
研究方法: 基于粒子群优化算法结合遗传算法的机器人栅格地图路径规划是一种智能算法的应用。它将粒子群优化算法和遗传算法相结合,以寻找最优路径规划解决方案。 研究路线: 理论研究:了解粒子群优化算法和遗传算法的基本原理,并掌握相关的路径规划理论知识。 算法设计:…...

内容安全复习 9 - 身份认证系统攻击与防御
文章目录 基于生物特征的身份认证系统概述基于生物特征的身份认证 人脸活体检测检测方法未解决问题 基于生物特征的身份认证系统概述 作用:判别用户的身份、保障信息系统安全。 是识别操作者身份的过程,要保证其**物理身份(现实࿰…...
Python-gui开发之Pycharm+pyside6/Pyqt6环境搭建
Python-gui开发之Pycharm+pyside6/Pyqt6环境搭建 软件版本一、软件安装1、Python安装2、Pycharm安装3、pyside6或pyqt6安装①安装pyside6②安装PyQt6和pyqt6-tools二、Pycharm项目配置1、插件安装2、新建项目以及环境配置3、包管理安装三、在Pycharm中配置PySide61、pyside6 Qt…...

大数据开发语言Scala入门 ,如何入门?
Ai文章推荐 1 作为程序员,开发用过最好用的AI工具有哪些? 2 Github Copilot正版的激活成功,终于可以chat了 3 idea,pycharm等的ai assistant已成功激活 4 新手如何拿捏 Github Copilot AI助手,帮助你提高写代码效率 5 Jetbrains的…...
【人机交互 复习】第1章 人机交互概述
人机交互的知识点碎,而且都是文字,过一遍脑子里什么都留不下,但是背时间已经来不及了,最好还是找题要题感吧,加深印象才是做对文科的关键 一、概念 1.人机交互(Human-Computer Interaction,HCI)࿱…...

HCIP-HarmonyOS Device Developer 课程大纲
一:系统及应用场景介绍 1 -(3 课时) - HarmonyOS 系统介绍;HarmonyOs 定义;HarmonyOS 特征; - 统一 OS,弹性部署;硬件互助,资源共享;一次开发,多…...

蓝桥杯 经典算法题 查找两个总和为特定值的索引
题目: 给定一个数组,找到两个总和为特定值的索引。 例如给定数组 [1, 2, 3, -2, 5, 7],给定总和 7,则返回索引 [1, 4]。 若有多组符合情况则输出索引对中小索引最小的一组。 题解: 本题可以通过暴力枚举,枚举每两…...

Java | Leetcode Java题解之第169题多数元素
题目: 题解: class Solution {public int majorityElement(int[] nums) {int count 0;Integer candidate null;for (int num : nums) {if (count 0) {candidate num;}count (num candidate) ? 1 : -1;}return candidate;} }...

十大机器学习算法深入浅出
本栏目涉及对于回归算法、聚类算法、决策树、随机森林、神经网络、贝叶斯算法、支持向量机等十大机器学习算法的笔记 下面是笔记大纲,具体内容可查看**“十大机器学习算法深入浅出”**专栏,内容持续更新,欢迎订阅专栏和专注我! 1…...
【论文笔记】Parameter-Effificient Transfer Learning for NLP
题目:Parameter-Effificient Transfer Learning for NLP 阅读 文章目录 0.摘要1.引言2 Adapter tuning for NLP3 实验3.1 参数/性能平衡3.2 讨论 4.相关工作 0.摘要 克服微调训练不高效的问题,增加一些adapter模块,思想就是固定原始的网络中的参数&…...

Qt异常处理
初步警告:异常安全功能不完整!一般情况下应该可以工作,但类仍然可能泄漏甚至崩溃。 Qt本身不会抛出异常。而是使用错误码, 但是C可能会抛出异常。此外,有些类有用户可见的错误消息,例如QIODevice::errorString()或QSqlQuery::lastError()。这…...

【ElasticSearch】ElasticSearch实战
初步检索 检索 ES 信息 1)、GET /_cat/nodes:查看所有节点 127.0.0.1 44 83 1 0.01 0.01 0.00 dilm * 1b06a843b8e3 *代表主节点 2)、GET /_cat/health:查看健康状况 1718265331 07:55:31 elasticsearch yellow 1 1 4 4 0 0…...

48-3 内网渗透 - 令牌操纵
访问令牌操纵 Windows 操作系统的访问控制模型是其安全性的重要组成部分,主要由访问令牌(Access Token)和安全描述符(Security Descriptor)构成。访问令牌是访问者持有的,而安全描述符则由被访问对象持有。通过对比访问令牌和安全描述符的内容,Windows 可以判断访问者是…...

架构师之 Kafka 核心概念入门
Kafka 核心概念 作为架构师,理解 Kafka 的核心概念至关重要。这些概念是构建高效、可靠的 Kafka 系统的基础。 以下是需要掌握的 Kafka 核心概念及其详细说明: 1. Topic 定义:Topic 是 Kafka 中用于存储和分类消息的逻辑命名空间。每个 Topic 代表一类数据流, 例如日志、…...
Redis通用命令详解
文章目录 一、Redis概述1.1 KEYS:查看符合模板的所有 key1.2 DEL:删除一个指定的 key1.3 EXISTS:判断 key 是否存在1.4 EXPIRE:给一个 key 设置有效期,有效期到期时该 key 会被自动删除1.5 TTL:查看一个 ke…...

物联网设备安装相关知识整理
拓扑图 对于ADAM-4150先接设备的整体的供电。 ADAM-4150就涉及到几个电子元器件的连接,一个是485-232的转换器,一个是将RS-232转换为USB的转接口,因为现在的计算机很多都去掉了RS-232接口而使用USB接口。 4150右侧有个拨码,分别两…...
React实现H5手势密码
监测应用进入前后台 在JavaScript中,监听H5页面是否在前台或后台运行,主要依赖于Page Visibility API。这个API在大多数现代浏览器中都是支持的,包括苹果的Safari和谷歌的Chrome(也就基本覆盖了Android和iOS平台)。下…...
[leetcode hot 150]第十五题,三数之和
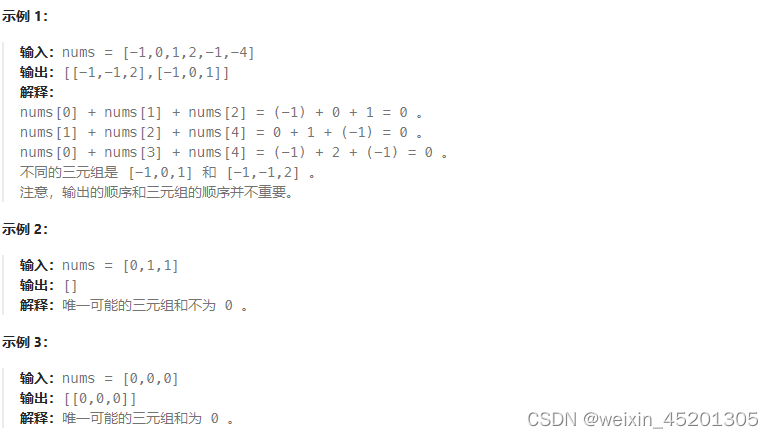
题目: 给你一个整数数组 nums ,判断是否存在三元组 [nums[i], nums[j], nums[k]] 满足 i ! j、i ! k 且 j ! k ,同时还满足 nums[i] nums[j] nums[k] 0 。请 你返回所有和为 0 且不重复的三元组。 注意:答案中不可以包含重复…...
视频AI分析定时任务思路解析
序言: 最近项目中用到视频ai分析,由于sdk涉及保密,不便透露,仅对定时任务分析的思路作出分享,仅供参考。 1、定时任务 由于ai服务器的性能上限,只能同时对64个rtsp流分析一种算法,或者对8个rts…...
)
从零开发游戏需要学习的c#模块,第二十章(2D 敌人与战斗触发)
本节课我们要学习的内容在地图上随机生成红色敌人玩家碰到敌人后,进入战斗模式战斗胜利后敌人消失,获得分数屏幕显示敌人数量using Microsoft.Xna.Framework; using Microsoft.Xna.Framework.Graphics; using Microsoft.Xna.Framework.Input; using Syst…...

如何让微信聊天记录成为你的数字记忆银行?WeChatMsg完全指南
如何让微信聊天记录成为你的数字记忆银行?WeChatMsg完全指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we…...

React Starter Kit 团队协作:如何建立统一的开发规范
React Starter Kit 团队协作:如何建立统一的开发规范 【免费下载链接】react-starter-kit Start your first React App. By using React, Redux, and React-Router. 项目地址: https://gitcode.com/gh_mirrors/reac/react-starter-kit React Starter Kit 是一…...

为什么92%的CRM项目在6个月内失去用户喜爱?揭秘Lovable CRM的3层情感化设计模型
更多请点击: https://intelliparadigm.com 第一章:Lovable CRM系统搭建 Lovable CRM 是一个轻量、可扩展、开发者友好的客户关系管理系统,专为中小团队设计,强调易用性与可定制性的平衡。它基于 Go 语言后端与 Vue 3 前端构建&am…...

python旅游分享点评网系统
目录同行可拿货,招校园代理 ,本人源头供货商项目概述核心功能技术栈扩展功能建议项目亮点项目技术支持源码获取详细视频演示 :同行可合作点击我获取源码->获取博主联系方式->进我个人主页-->同行可拿货,招校园代理 ,本人源头供货商 项目概述 Python旅游分…...

微服务架构下的旺店通与畅捷通T+系统集成
旺店通与畅捷通T系统集成方案轻易云数据集成平台为企业提供高效、稳定的系统对接解决方案,实现旺店通企业奇门与畅捷通T系统的无缝数据流转。该方案充分发挥轻易云平台的智能化数据处理能力,确保业务数据在跨系统传输过程中的准确性和时效性。系统简介旺…...

基于Python + LLM的AI客服协作系统设计与实现
🧑💻 博主介绍 & 诚邀关注 作者:专注于 Java、Python、前端开发的技术博主 | 全网粉丝 30 万 在校期间协助导师完成毕业设计课题分类、论文格式初审及代码整理工作;工作后持续分享毕设思路,助力毕业生顺利完成…...

Go语言表单处理与文件上传实战
Go语言表单处理与文件上传实战 引言 表单处理和文件上传是Web开发中的常见需求。本文将深入探讨Go语言中表单处理的最佳实践,包括表单验证、文件上传、安全处理等方面。 一、表单处理基础 1.1 获取表单数据 func HandleForm(w http.ResponseWriter, r *http.Request…...

从FAST到GAMPII:一份给GNSS新手的PPP数据下载与预处理避坑指南
从FAST到GAMPII:GNSS数据预处理全流程实战指南 1. 精密单点定位的数据基石 当你第一次打开GAMP软件准备进行北斗系统的精密单点定位分析时,是否曾被各种数据文件搞得晕头转向?观测文件(o)、导航文件(n/p)、差分码偏差(DCB)文件,…...

Perseus:5分钟解锁碧蓝航线全皮肤的神奇补丁
Perseus:5分钟解锁碧蓝航线全皮肤的神奇补丁 【免费下载链接】Perseus Azur Lane scripts patcher. 项目地址: https://gitcode.com/gh_mirrors/pers/Perseus 还在为碧蓝航线中那些精美皮肤需要付费而烦恼吗?想免费体验所有舰娘的不同外观吗&…...