Linux系统ubuntu20.04 无人机PX4 开发环境搭建(失败率很低)
Linux系统ubuntu20.04 无人机PX4 开发环境搭建
- PX4固件下载
- 开发环境搭建
- MAVROS安装
- 安装地面站QGC
PX4固件下载
PX4的源码处于GitHub,因为众所周知的原因git clone经常失败,此处从Gitee获取PX4源码和依赖模块。
git clone https://gitee.com/voima/PX4-Autopilot.git
正克隆到 ‘PX4-Autopilot’…
remote: Enumerating objects: 454209, done.
remote: Total 454209 (delta 0), reused 0 (delta 0), pack-reused 454209
接收对象中: 100% (454209/454209), 215.48 MiB | 2.32 MiB/s, 完成.
处理 delta 中: 100% (334699/334699), 完成.


使用cd命令切换到 px4项目文件目录:
cd ~/PX4-Autopilot
使用以下命令切换版本,以V1.14.0为例:
git checkout v1.14.0 #切换到1.14.0分支,当然也可以尝试其他版本
因为PX4的完整项目是嵌套子模块存储的,以上命令只下载了px4的基本代码,所以我们要进行子模块的下载,运行下列命令:
git submodule update --init --recursive # 在~/PX4-Autopilot目录下执行
以上命令中,submodule是子模块的意思, --init 选项会初始化,并注册子模块的地址,–recursive选项会递归克隆子模块。
此更新的链接来源于~/PX4-Autopilot/.gitmodules(注意是隐藏文件)
将文件打开,粘贴到下面,可以看到里面都github的地址,直接用上面的命令,会很难成功
[submodule "src/modules/mavlink/mavlink"]path = src/modules/mavlink/mavlinkurl = https://github.com/mavlink/mavlink.gitbranch = master
[submodule "src/drivers/uavcan/libuavcan"]path = src/drivers/uavcan/libuavcanurl = https://github.com/dronecan/libuavcan.gitbranch = main
[submodule "Tools/simulation/jmavsim/jMAVSim"]path = Tools/simulation/jmavsim/jMAVSimurl = https://github.com/PX4/jMAVSim.gitbranch = main
[submodule "Tools/simulation/gazebo-classic/sitl_gazebo-classic"]path = Tools/simulation/gazebo-classic/sitl_gazebo-classicurl = https://github.com/PX4/PX4-SITL_gazebo-classic.gitbranch = main
[submodule "src/drivers/gps/devices"]path = src/drivers/gps/devicesurl = https://github.com/PX4/PX4-GPSDrivers.gitbranch = main
[submodule "platforms/nuttx/NuttX/nuttx"]path = platforms/nuttx/NuttX/nuttxurl = https://github.com/PX4/NuttX.gitbranch = px4_firmware_nuttx-10.3.0+-v1.14
[submodule "platforms/nuttx/NuttX/apps"]path = platforms/nuttx/NuttX/appsurl = https://github.com/PX4/NuttX-apps.gitbranch = px4_firmware_nuttx-10.3.0+
[submodule "Tools/flightgear_bridge"]path = Tools/simulation/flightgear/flightgear_bridgeurl = https://github.com/PX4/PX4-FlightGear-Bridge.git
[submodule "Tools/simulation/jsbsim/jsbsim_bridge"]path = Tools/simulation/jsbsim/jsbsim_bridgeurl = https://github.com/PX4/px4-jsbsim-bridge.git
[submodule "src/drivers/cyphal/libcanard"]path = src/drivers/cyphal/libcanardurl = https://github.com/opencyphal/libcanard.git
[submodule "src/drivers/cyphal/public_regulated_data_types"]path = src/drivers/cyphal/public_regulated_data_typesurl = https://github.com/opencyphal/public_regulated_data_types.git
[submodule "src/drivers/cyphal/legacy_data_types"]path = src/drivers/cyphal/legacy_data_typesurl = https://github.com/PX4/public_regulated_data_types.gitbranch = legacy
[submodule "src/lib/crypto/monocypher"]path = src/lib/crypto/monocypherurl = https://github.com/PX4/Monocypher.gitbranch = px4
[submodule "src/lib/events/libevents"]path = src/lib/events/libeventsurl = https://github.com/mavlink/libevents.gitbranch = main
[submodule "src/lib/crypto/libtomcrypt"]path = src/lib/crypto/libtomcrypturl = https://github.com/PX4/libtomcrypt.gitbranch = px4
[submodule "src/lib/crypto/libtommath"]path = src/lib/crypto/libtommathurl = https://github.com/PX4/libtommath.gitbranch = px4
[submodule "src/modules/uxrce_dds_client/Micro-XRCE-DDS-Client"]path = src/modules/uxrce_dds_client/Micro-XRCE-DDS-Clienturl = https://github.com/PX4/Micro-XRCE-DDS-Client.gitbranch = px4
将其更新为 gitee 的地址,已经整理测试好了,直接替换掉文件的内容即可
[submodule "src/modules/mavlink/mavlink"]path = src/modules/mavlink/mavlinkurl = https://gitee.com/wtp95/mavlink.gitbranch = master[submodule "Tools/flightgear_bridge"]path = Tools/simulation/flightgear/flightgear_bridgeurl = https://gitee.com/seokhb/PX4-FlightGear-Bridge.git[submodule "Tools/simulation/gazebo-classic/sitl_gazebo-classic"]path = Tools/simulation/gazebo-classic/sitl_gazebo-classicurl = https://gitee.com/seokhb/PX4-SITL_gazebo-classic.gitbranch = main[submodule "Tools/simulation/jmavsim/jMAVSim"]path = Tools/simulation/jmavsim/jMAVSimurl = https://gitee.com/seokhb/jMAVSim.gitbranch = main[submodule "Tools/simulation/jsbsim/jsbsim_bridge"]path = Tools/simulation/jsbsim/jsbsim_bridgeurl = https://gitee.com/seokhb/px4-jsbsim-bridge.git[submodule "platforms/nuttx/NuttX/apps"]path = platforms/nuttx/NuttX/appsurl = https://gitee.com/seokhb/NuttX-apps.gitbranch = px4_firmware_nuttx-10.3.0+[submodule "platforms/nuttx/NuttX/nuttx"]path = platforms/nuttx/NuttX/nuttxurl = https://gitee.com/seokhb/NuttX.gitbranch = px4_firmware_nuttx-10.3.0+-v1.14[submodule "src/drivers/cyphal/public_regulated_data_types"]path = src/drivers/cyphal/public_regulated_data_typesurl = https://gitee.com/seokhb/public_regulated_data_types.git[submodule "src/drivers/cyphal/legacy_data_types"]path = src/drivers/cyphal/legacy_data_typesurl = https://gitee.com/jiyuanwangxs/legacy_data_types.gitbranch = legacy[submodule "src/drivers/cyphal/libcanard"]path = src/drivers/cyphal/libcanardurl = https://gitee.com/seokhb/libcanard.git[submodule "src/drivers/gps/devices"]path = src/drivers/gps/devicesurl = https://gitee.com/seokhb/PX4-GPSDrivers.gitbranch = main[submodule "src/drivers/uavcan/libuavcan"]path = src/drivers/uavcan/libuavcanurl = https://gitee.com/seokhb/libuavcan.git[submodule "src/lib/crypto/libtomcrypt"]path = src/lib/crypto/libtomcrypturl = https://gitee.com/seokhb/libtomcrypt.gitbranch = px4[submodule "src/lib/crypto/libtommath"]path = src/lib/crypto/libtommathurl = https://gitee.com/seokhb/libtommath.gitbranch = px4[submodule "src/lib/crypto/monocypher"]path = src/lib/crypto/monocypherurl = https://gitee.com/seokhb/Monocypher.gitbranch = px4[submodule "src/lib/events/libevents"]path = src/lib/events/libeventsurl = https://gitee.com/seokhb/libevents.gitbranch = main[submodule "src/modules/uxrce_dds_client/Micro-XRCE-DDS-Client"]path = src/modules/uxrce_dds_client/Micro-XRCE-DDS-Clienturl = https://gitee.com/seokhb/Micro-XRCE-DDS-Client.gitbranch = px4
然后执行下面的命令,就可以
git submodule update --init --recursive
有的子模块还是走的github,失败了就多试几次,直到用上面命令不再下载东西了就可以了

开发环境搭建
PX4的完整代码已经下载完了,接下来就是配置开发环境。PX4源码中已经提供了开发环境配置的脚本,在/PX4-Autopilot/Tools/setup目录中,该目录下的文件如下:
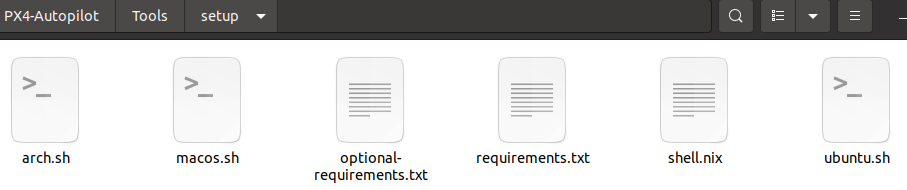
可以看到里面有Arch/Macos和ubuntu系统的配置脚本。
ubuntu系统,运行ubuntu.sh文件
这是一个脚本文件,里面是一些bash命令,可以理解为一系列下载px4开发环境的代码。在上图界面右键选择在终端打开,使用下列命令运行:
bash ubuntu.sh
如果出现很多错误,和镜像源有关,那么则手动安装一些模块
sudo apt install python3-pip
pip3 install kconfiglib
pip3 install --user jinja2
pip3 install --user jsonschema
sudo apt-get update
sudo apt-get install libgstreamer1.0-0 gstreamer1.0-plugins-base gstreamer1.0-plugins-good gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly gstreamer1.0-libav gstreamer1.0-doc gstreamer1.0-tools gstreamer1.0-x gstreamer1.0-alsa gstreamer1.0-gl gstreamer1.0-gtk3 gstreamer1.0-qt5 gstreamer1.0-pulseaudio libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev
然后需配置~/.bashrc文件,打开该文件,在底部添加如下内容,保存。
# >>> PX4 initialize >>>
source ~/PX4-Autopilot/Tools/simulation/gazebo-classic/setup_gazebo.bash ~/PX4-Autopilot ~/PX4-Autopilot/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilot
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic
# <<< PX4 initialize <<<
然后进行编译
cd ~/PX4-Autopilot # 也可以 roscd px4
make px4_sitl_default gazebo
```cd ~/PX4-Autopilot
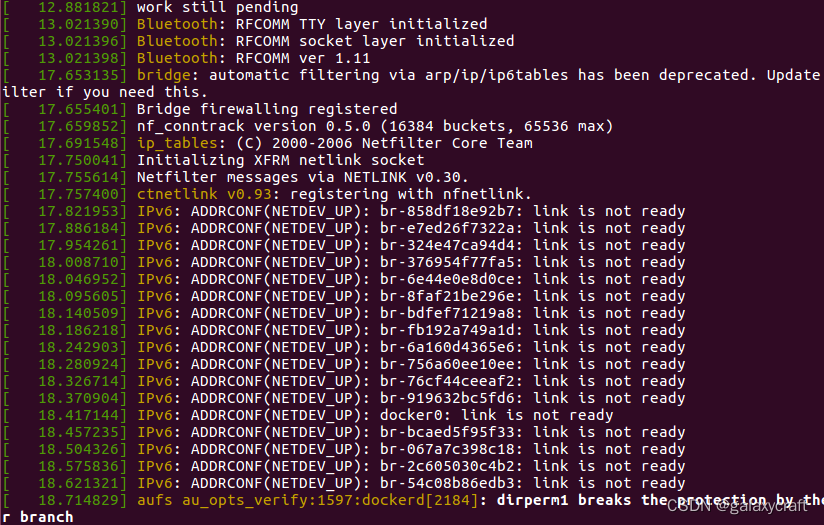
如果出现下面的错误,一直在等待master> [Msg] Waiting for master.
[Err] [ConnectionManager.cc:121] Failed to connect to master in 30 seconds.
[Err] [gazebo_shared.cc:78] Unable to initialize transport.
[Err] [gazebo_client.cc:56] Unable to setup Gazebo
则需要在.bashrc文件的最后一行加入```c
source /opt/ros/noetic/setup.bash
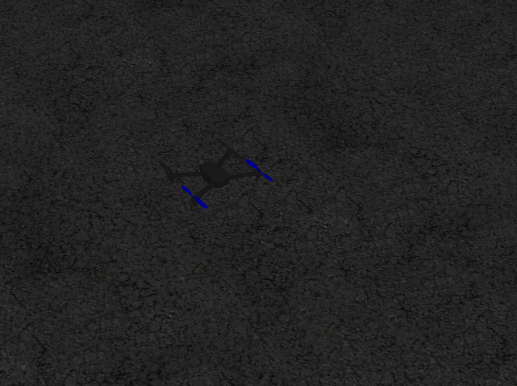
然后再启动
终端出现如下,gazebo启动,中间有个小飞机,则代表开发环境搭建成功
MAVROS安装
安装geographiclib数据库(GeographicLib是一个用于解决地理坐标转换、大地测量(geodesy)和地图投影等问题的库,广泛用于航空航天和GIS(地理信息系统)领域)
安装MAVROS
sudo apt install ros-noetic-mavros ros-noetic-mavros-extras
准备解压 …/ros-noetic-mavros_1.18.0-1focal.20240304.150259_amd64.deb …
正在解压 ros-noetic-mavros (1.18.0-1focal.20240304.150259) 并覆盖 (1.15.0-1focal
.20230216.003459) …
准备解压 …/ros-noetic-mavros-extras_1.18.0-1focal.20240304.151354_amd64.deb .
…
正在解压 ros-noetic-mavros-extras (1.18.0-1focal.20240304.151354) 并覆盖 (1.15.0
-1focal.20230216.014052) …
正在设置 ros-noetic-mavros (1.18.0-1focal.20240304.150259) …
正在设置 ros-noetic-mavros-extras (1.18.0-1focal.20240304.151354) …
安装geographiclib数据库(GeographicLib是一个用于解决地理坐标转换、大地测量(geodesy)和地图投影等问题的库,广泛用于航空航天和GIS(地理信息系统)领域)
wget https://gitee.com/robin_shaun/XTDrone/raw/master/sitl_config/mavros/install_geographiclib_datasets.sh
sudo chmod a+x ./install_geographiclib_datasets.sh
sudo ./install_geographiclib_datasets.sh
检查MAVROS是否安装成功可输入如下命令:
roslaunch px4 mavros_posix_sitl.launch
新打开一个终端,输入:
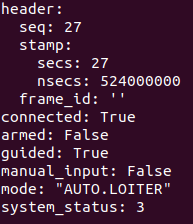
rostopic echo mavros/state
header:
seq: 27
stamp:
secs: 27
nsecs: 524000000
frame_id: ‘’
connected: True
armed: False
guided: True
manual_input: False
mode: “AUTO.LOITER”
system_status: 3
看到connected为True 则 MAVROS安装成功
安装地面站QGC
首先执行下面指令
sudo usermod -a -G dialout $USER
sudo apt-get remove modemmanager -y
安装一些依赖库
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
sudo apt install libfuse2 -y
sudo apt install libxcb-xinerama0 libxkbcommon-x11-0 libxcb-cursor0 -y
然后系统登出再登入,确定改变了用户权限
下面开始安装QGC
下载QGroundControl.AppImage,下载链接
将该文件移动到主目录下面
通过指令更改权限,和运行
chmod +x ./QGroundControl.AppImage
./QGroundControl.AppImage
然后会运行QGC的软件
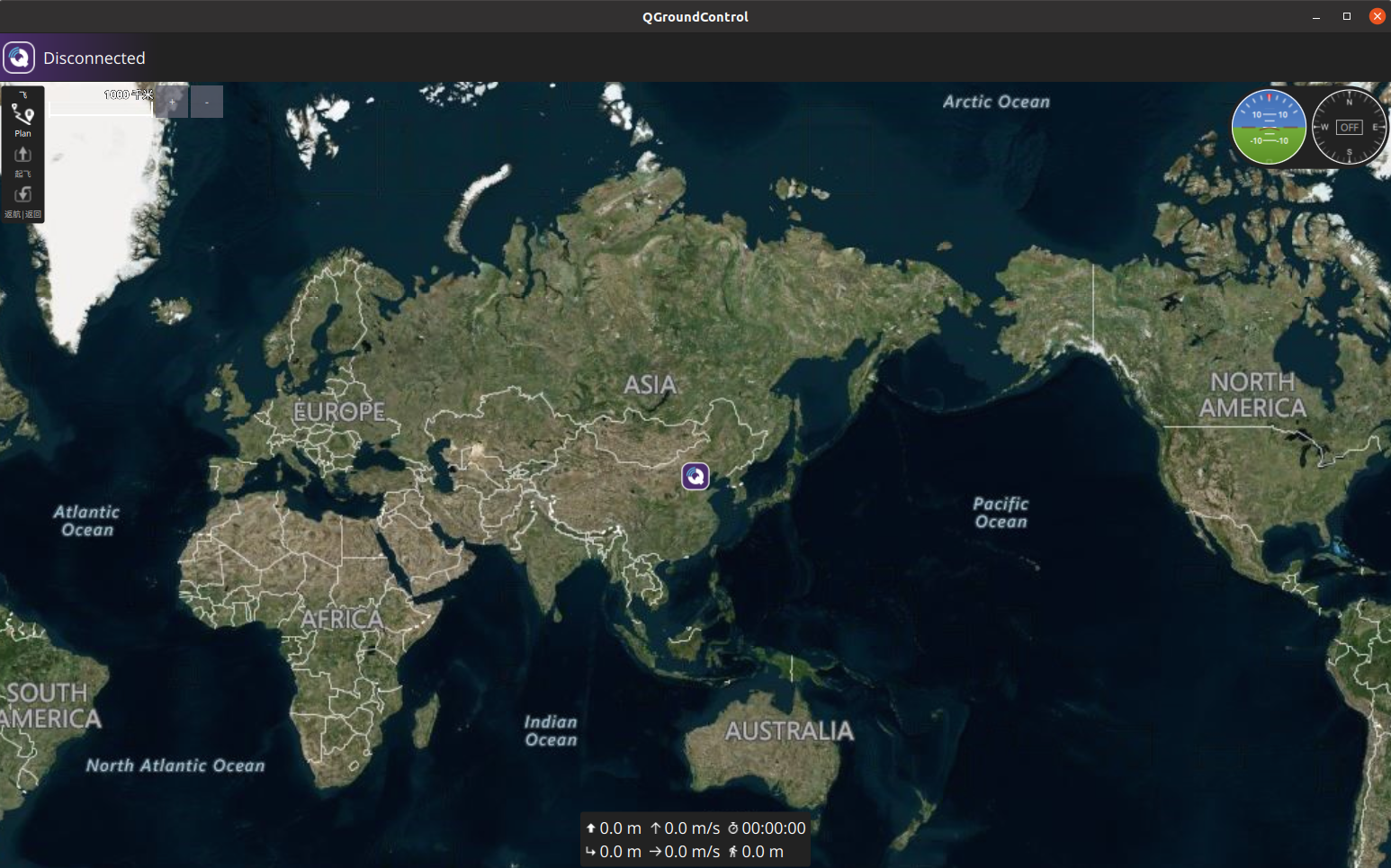
之后双击 QGroundControl.AppImage 图标也可以运行该软件
相关文章:
Linux系统ubuntu20.04 无人机PX4 开发环境搭建(失败率很低)
Linux系统ubuntu20.04 无人机PX4 开发环境搭建 PX4固件下载开发环境搭建MAVROS安装安装地面站QGC PX4固件下载 PX4的源码处于GitHub,因为众所周知的原因git clone经常失败,此处从Gitee获取PX4源码和依赖模块。 git clone https://gitee.com/voima/PX4-…...
)
中间件(express)
中间件(express) 在Express.js中,中间件(Middleware)是一个重要的组成部分,用于处理HTTP请求和响应。中间件函数具有特定的签名,并可以接受请求对象(req)、响应对象&…...

【代码随想录算法训练Day44】LeetCode 322.零钱兑换、LeetCode 279.完全平方数、LeetCode139.单词拆分
Day44 动态规划第六天 LeetCode 322.零钱兑换 dp数组的含义:装满容量为j的背包需要的最少物品数为dp[j] 递推公式:dp[j]min(dp[j-coins[i]]1,dp[j]) 初始化:dp[0]0,dp[j]INT_MAX 遍历顺序:个数问题与遍历顺序无关,都…...

ChatGLM2-6B 部署
本文主要对 ChatGLM2-6B 模型的部署和推理过程进行介绍。 一、部署环境 在阿里云服务器上部署,具体环境如下: modelscope:1.9.5 pytorch 2.0.1 tensorflow 2.13.0 python 3.8 cuda 118 ubuntu 20.04 CPU 8 core 内存 30 GiB GPU NVIDIA A10 2…...

武汉工程大学24计算机考研数据,有学硕招收调剂,而专硕不招收调剂!
武汉工程大学是一所以工为主,覆盖工、理、管、经、文、法、艺术、医学、教育学等九大学科门类的多科性教学研究型大学,是湖北省重点建设高校、湖北省国内一流学科建设高校,入选卓越工程师教育培养计划、中西部高校基础能力建设工程、“新工科…...
python爬虫之selenium自动化操作
python爬虫之selenium自动化操作 需求:操作淘宝去掉弹窗广告搜索物品后进入百度回退又前进 selenium模块的基本使用 问题:selenium模块和爬虫之间具有怎样的关联? 1、便捷的获取网站中动态加载的数据 2、便捷实现模拟登录 什么是selenium模块&#x…...
【漏洞复现】红帆iOffice.net wssRtSyn接口处存在SQL注入
【产品&&漏洞简述】 红帆iOffice.net从最早满足医院行政办公需求(传统OA),到目前融合了卫生主管部门的管理规范和众多行业特色应用,是目前唯一定位于解决医院综合业务管理的软件,是最符合医院行业特点的医院综…...

云计算【第一阶段(17)】账号和权限管理
目录 一、用户账号和组账号概述 1.1、用户账号的三种角色 1.2、组账号的两个角色 二、用户账号文件 2.1、/etc/passwd 2.2、/etc/shadow 2.3、chage 命令 三、组账号文件 3.1、/etc/group 3.2、/etc/gshadow 四、添加组账户 4.1、添加删除组成员 4.2、删除组账号 …...
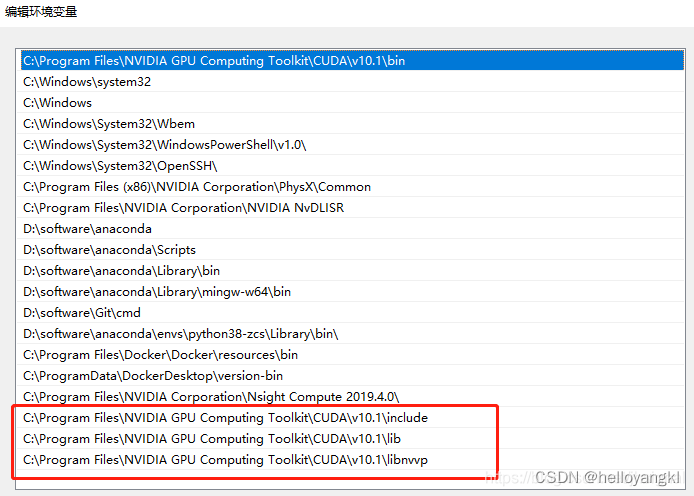
环境配置02:CUDA安装
1. CUDA安装 Nvidia官网下载对应版本CUDA Toolkit CUDA Toolkit 12.1 Downloads | NVIDIA Developer CUDA Toolkit 12.5 Downloads | NVIDIA Developer 安装配置步骤参考:配置显卡cuda与配置pytorch - 知乎 (zhihu.com) 2. 根据CUDA版本,安装cudnn …...
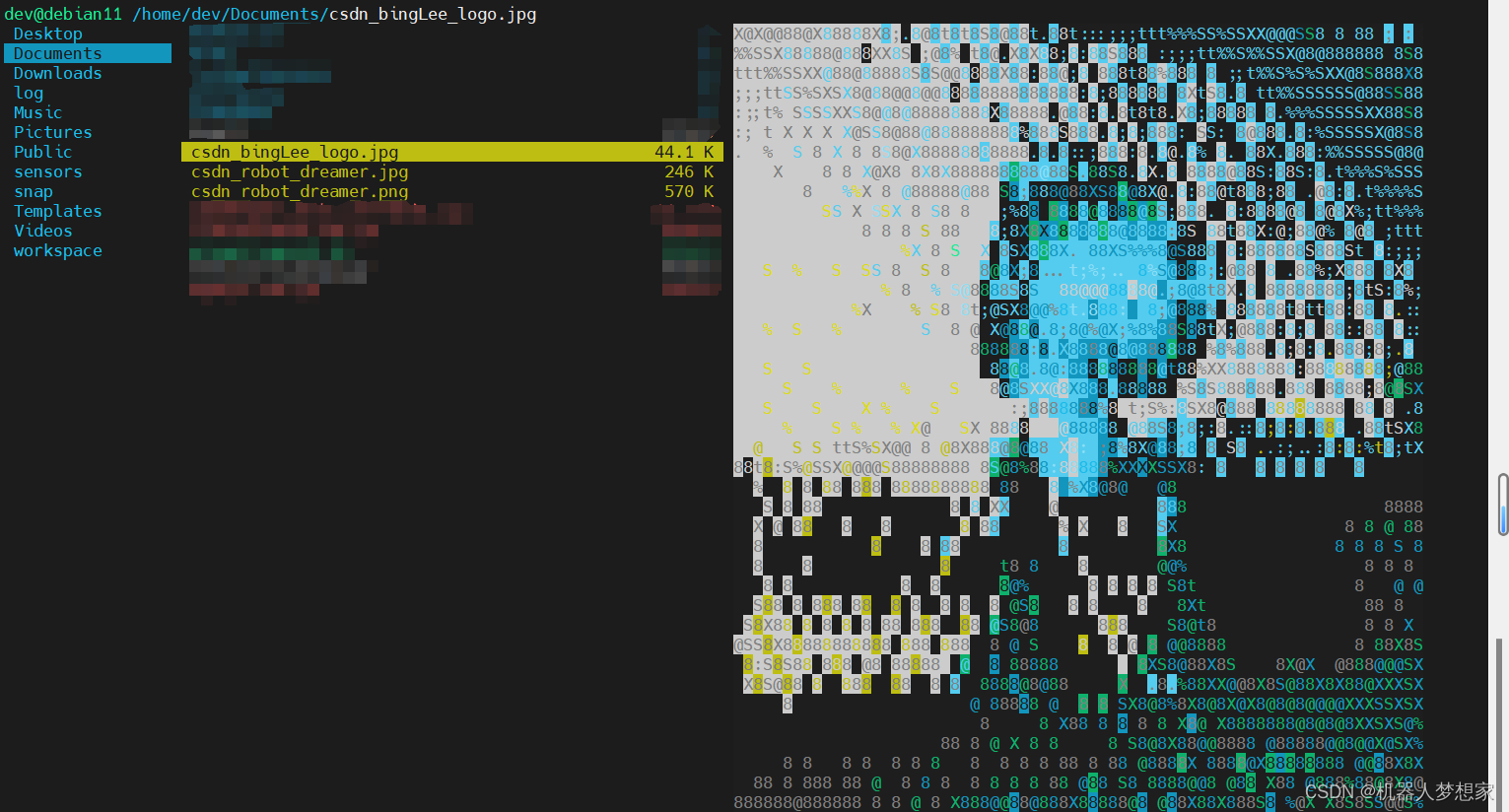
Ranger配置图片及json文件预览
文章目录 前言下载apt下载pip下载 配置使用json文件预览方法一 修改scope用cat预览方法二 安装jq预览配置ranger 图片文件预览方法一 使用img2txt预览方法二 使用fim预览配置ranger 总结 前言 本文主要讲解Ranger12如何配置json及图片的预览设置,如下是ranger的介绍…...
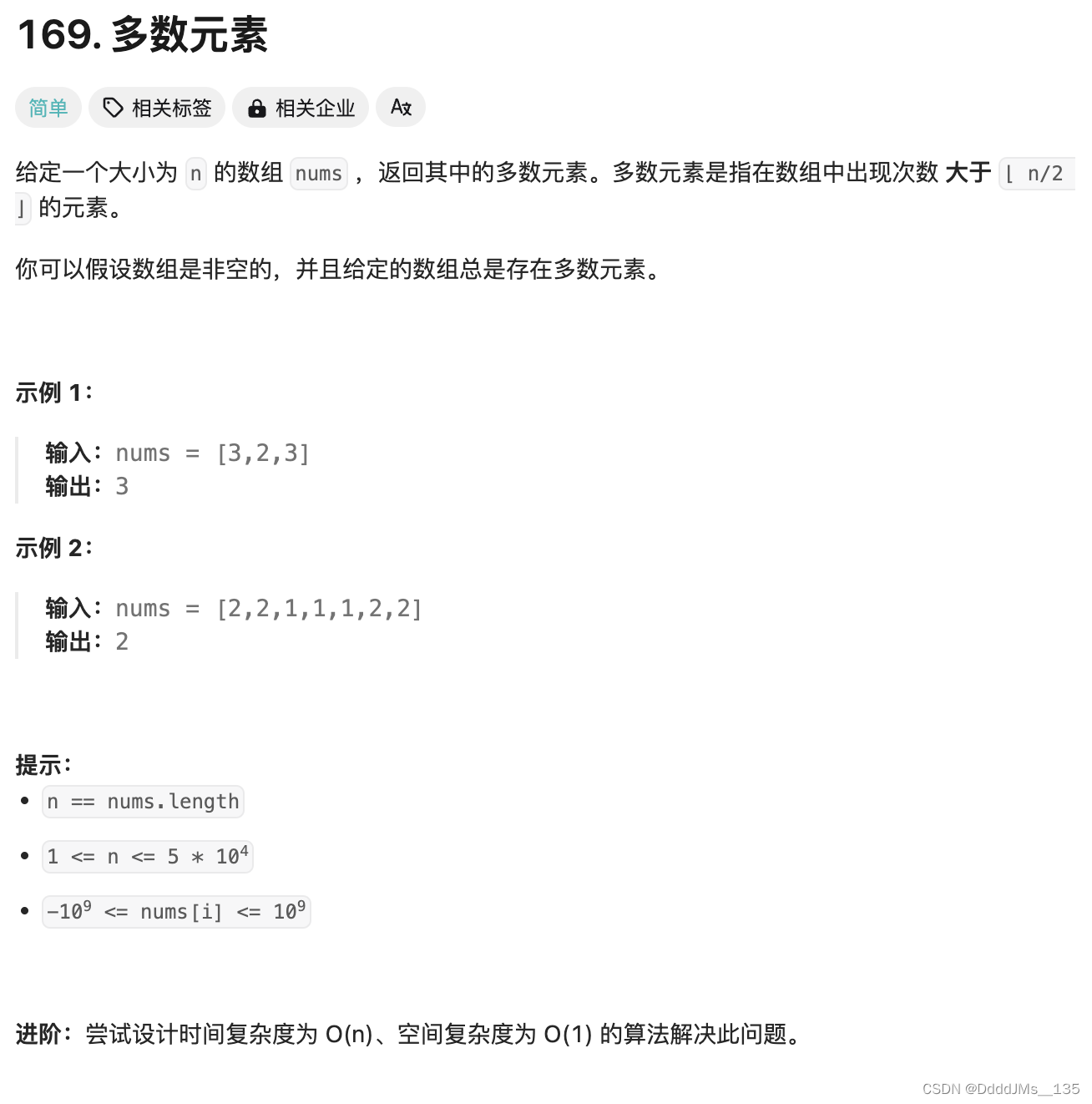
C语言 | Leetcode C语言题解之第169题多数元素
题目: 题解: int majorityElement(int* nums, int numsSize) {int ans 0;for (int i 0, cnts 0; i < numsSize; i) {if (nums[i] ans) {cnts;} else if (cnts 0) {ans nums[i];} else {cnts--;}}return ans; }...
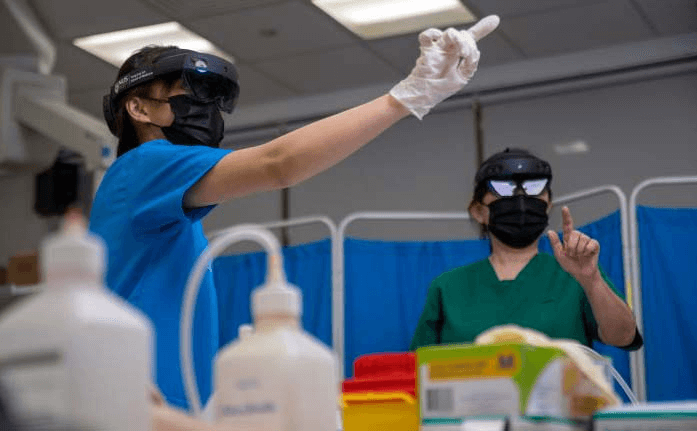
常说的云VR是什么意思?与传统vr的区别
虚拟现实(Virtual Reality,简称VR)是一种利用计算机技术模拟产生一个三维空间的虚拟世界,让用户通过视觉、听觉、触觉等感官,获得与现实世界类似或超越的体验。VR技术发展历程可追溯至上世纪,经历概念提出、…...

华为云CodeArts API:API管理一体化平台 5月新特性上线啦!
CodeArts API是华为云API全生命周期管理一体化解决方案平台,支持开发者高效实现API设计、API开发、API测试、API托管、API运维、API变现的一站式体验。 通过以API契约为锚点,CodeArts API保证API各阶段数据高度一致,为开发者提供友好易用的A…...
ubuntu16因swap分区uuid错误启动慢排查
感觉ubuntu16启动特别慢 dmesg查看如下: [ 10.050123] audit: type1400 audit(1718608189.395:11): apparmor"STATUS" operation"profile_load" profile"unconfined" name"webbrowser-app//oxide_helper" pid708 comm&q…...
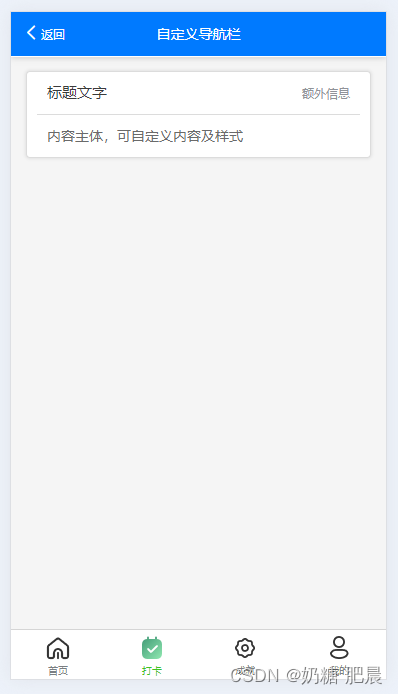
[保姆级]uniapp自定义导航栏
文章目录 导文隐藏默认导航栏:全局隐藏当前页面隐藏 添加自定义导航栏视图:手写导航栏组件导航栏 导文 在 UniApp 中,自定义导航栏通常涉及到隐藏默认的导航栏,并在页面顶部添加自定义的视图组件来模拟导航栏的功能。 隐藏默认导航…...
Java 桥接模式(Bridge Pattern)是设计模式中的一种结构型设计模式,桥接模式的核心思想是将抽象与实现解耦
桥接模式(Bridge Pattern)是一种结构型设计模式,它将抽象部分与它的实现部分分离,使它们都可以独立地变化。桥接模式的核心思想是将抽象与实现解耦,使得它们可以独立扩展。 在桥接模式中,通常包含以下四个…...
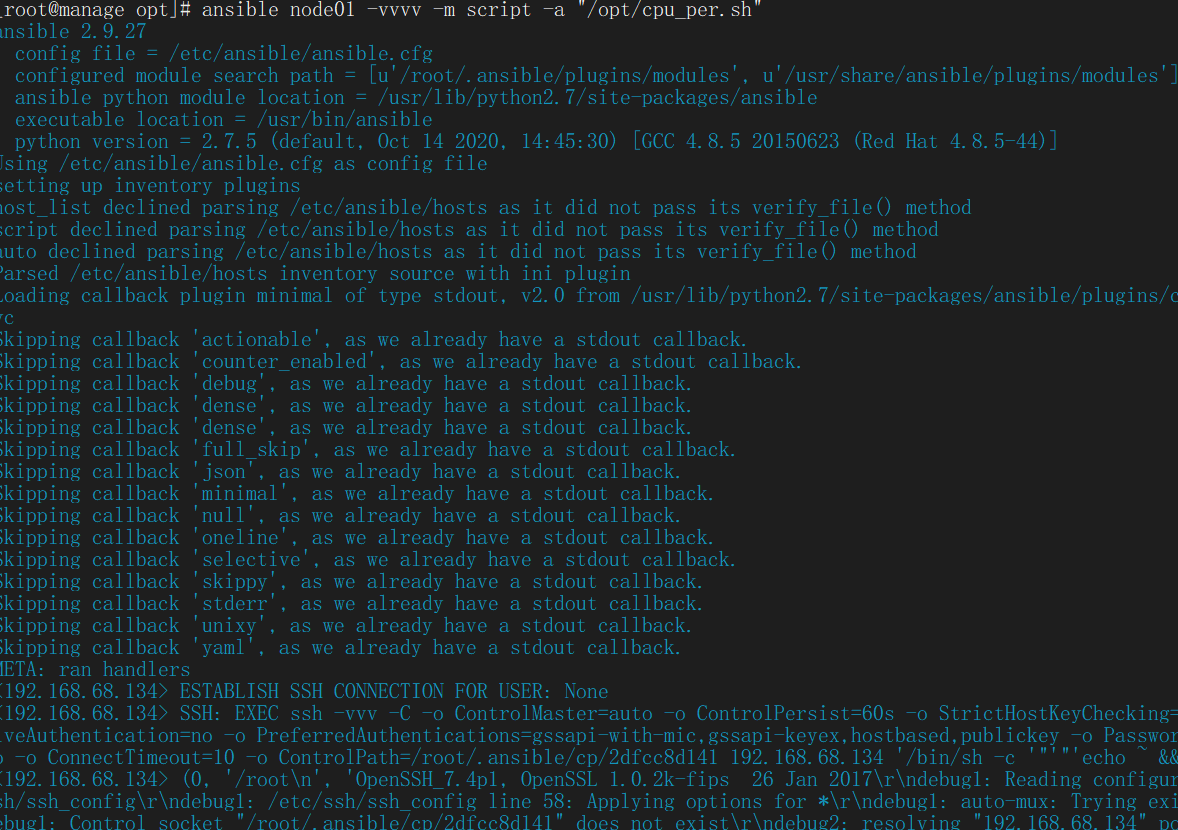
入门Ansible常用模块
自动化运维Devops-Ansible Ansible是新出现的自动化运维工具,基于Python 开发,集合了众多运维工具(puppet 、cfengine、chef、func、fabric)的优点,实现了批量系统配置 、批量程序部署、批量运行命令 等功能。Ansible…...
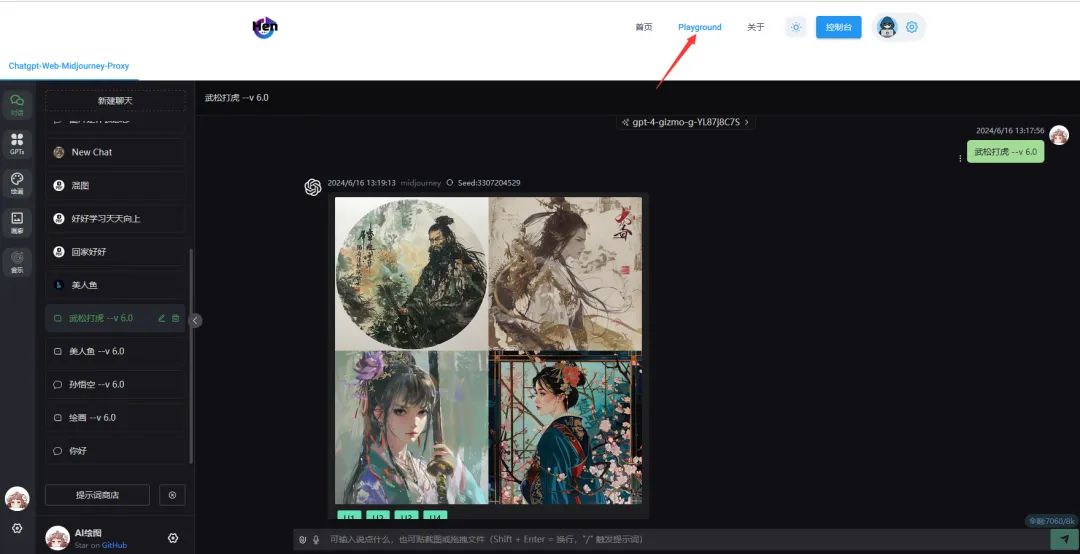
全能AI客户端:ChatGPT Web Midjourney Proxy,AI绘画+GPT4o对话
这绝对是目前最全能的 AI 客户端,ui 界面集成 ChatGPT AI 对话、Midjourney AI 画图、Suno AI 音乐等等市面主流的 AI 功能,只需绑定一个 API key 即可使用全部 AI 功能,Midjourney 甚至比官方好用几倍! 项目简介 ChatGPT Web Mi…...
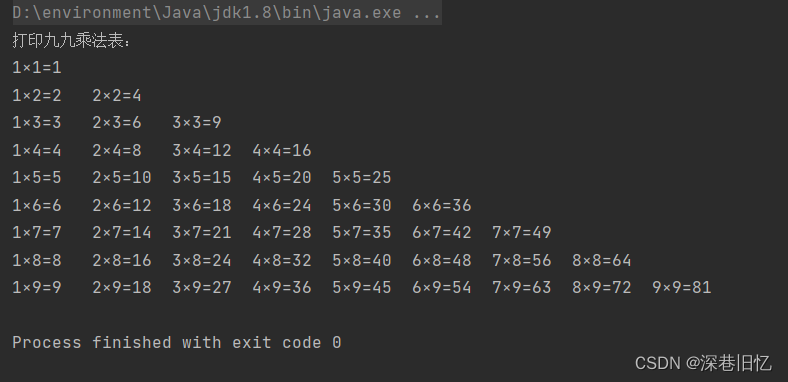
Java基础 - 练习(四)打印九九乘法表
Java基础练习 打印九九乘法表,先上代码: public static void multiplicationTable() {for (int i 1; i < 9; i) {for (int j 1; j < i; j) {// \t 跳到下一个TAB位置System.out.print(j "" i "" i * j "\t"…...
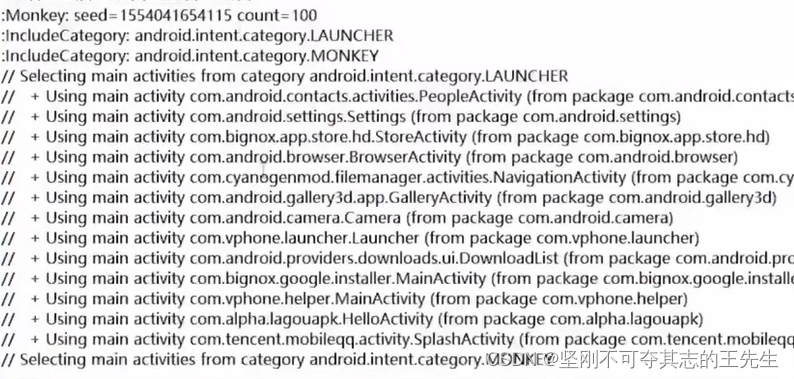
软件测试——稳定性测试:adb Monkey
Monkey 1. Monkey1.1 Monkey 是什么1.2 Monkey 测试场景1.3 Monkey 特点1.4 Monkey 在哪里1.5 测试准备事项1.6 Monkey 参数列表 2. 基本命令3. 常用参数4. 事件类型5. 调试参数6. 日志管理7. 日志错误定位8. Monkey测试可以发现的问题 1. Monkey 1.1 Monkey 是什么 Monkey是一…...

ARM链接器命令行选项优化与实战技巧
1. ARM链接器命令行选项深度解析 在嵌入式开发领域,ARM链接器(armlink)作为工具链的关键组件,承担着将多个目标文件合并为可执行程序的重任。不同于简单的文件拼接,现代链接器提供了数十种精细控制选项,能够深度优化代码布局、调试…...

SystemVerilog仿真探秘:从delta-cycle到时间片的时序解析
1. 揭开SystemVerilog仿真的神秘面纱 刚接触SystemVerilog仿真时,很多人都会被"delta-cycle"和"时间片"这些概念搞得一头雾水。我刚开始学习时也是这样,直到在实际项目中遇到了信号竞争问题,才真正理解这些概念的重要性。…...

蒙特卡洛方法赋能智能体决策:原理、实现与工程实践
1. 项目概述:一个为智能体注入“蒙特卡洛”思想的工具箱最近在探索智能体(Agent)开发时,我一直在思考一个问题:如何让智能体的决策过程不那么“一根筋”?我们常见的基于规则或简单LLM调用的智能体ÿ…...

基于MCP协议构建垂直领域AI知识服务:猴头菇茶MCP服务器实战
1. 项目概述与核心价值最近在折腾AI Agent的开发,发现一个挺有意思的项目,叫jackrain19743/hou-tea-mcp-server。乍一看这个名字,可能会有点摸不着头脑,“hou-tea”是啥?其实这是一个基于Model Context Protocol&#…...

技术演讲的恐惧症:从实验室到舞台的艰难跨越
一、实验室里的从容,舞台上的慌乱对于软件测试从业者而言,实验室是我们的“舒适区”。在堆满服务器、屏幕上跳动着代码与测试用例的空间里,我们能精准定位一行代码的bug,能设计出覆盖所有场景的测试方案,能在复杂的系统…...

【波导仿真】基于矢量有限元法分析均匀波导附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。 🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室 👇 关注我领取海量matlab电子书和数学建模资料 &#x…...

别再死记公式了!用“信号与系统”的视角,5分钟看懂卡尔曼滤波与互补滤波的本质区别
从频域视角解析卡尔曼滤波与互补滤波的本质差异 在机器人控制和姿态估计领域,数据融合算法始终是工程师们关注的焦点。当我们面对陀螺仪和加速度计这两种各具特色的传感器数据时,如何有效融合它们的长处,同时规避各自的短板,成为构…...

Flutter 自定义动画完全指南
Flutter 自定义动画完全指南 引言 动画是现代移动应用的重要组成部分,它能够提升用户体验,使界面更加生动。Flutter 提供了强大的动画系统,本文将深入探讨如何创建自定义动画效果。 动画基础回顾 动画类型 补间动画 (Tween Animation) - 最常…...

告别理论!在Spartan-6上玩转DDR3:从MIG IP核配置到UCF约束文件修改的完整避坑指南
Spartan-6 FPGA DDR3实战:从MIG配置到硬件调试的全链路解析 当你在ISE中点击"Generate"按钮完成MIG IP核配置时,真正的挑战才刚刚开始。这份指南将带你穿越从IP核生成到稳定运行的完整链路,特别聚焦那些官方文档语焉不详、网络教程…...

英雄联盟LCU工具:如何用LeagueAkari提升你的游戏效率
英雄联盟LCU工具:如何用LeagueAkari提升你的游戏效率 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit LeagueAkari是一款基于英雄联…...