【PX4飞控】mavros gps相关话题分析,经纬度海拔获取方法,卫星数锁定状态获取方法
使用 ROS1-Noetic 和 mavros v1.20.1,
携带经纬度海拔的话题主要有三个:
- /mavros/global_position/raw/fix
- /mavros/gpsstatus/gps1/raw
- /mavros/global_position/global
查看 mavros 源码,来分析他们的发布过程。发现前两个话题都对应了同一个 mavlink 消息,他们都在 GPS_RAW_INT 的订阅回调中发布,但是对应不同的源文件,对信息的处理方法略有不同。
/mavros/global_position/raw/fix 的发布在源文件 mavros/mavros/src/plugins/global_position.cpp 中
raw_fix_pub = gp_nh.advertise<sensor_msgs::NavSatFix>("raw/fix", 10);
/mavros/gpsstatus/gps1/raw 的发布在插件中 mavros/mavros_extras/src/plugins/gps_status.cpp 中
gps1_raw_pub = gpsstatus_nh.advertise<mavros_msgs::GPSRAW>("gps1/raw", 10);
搜索两个发布者被调用的位置。
raw_fix_pub 主要用来将原始 GPS 数据(未经 EKF 融合)转发到 /mavros/global_position/raw/fix,并对海拔进行了转换,符合 WGS-84。
// mavros/mavros/src/plugins/global_position.cppvoid handle_gps_raw_int(const mavlink::mavlink_message_t *msg, mavlink::common::msg::GPS_RAW_INT &raw_gps)
{auto fix = boost::make_shared<sensor_msgs::NavSatFix>();fix->header = m_uas->synchronized_header(child_frame_id, raw_gps.time_usec);fix->status.service = sensor_msgs::NavSatStatus::SERVICE_GPS;if (raw_gps.fix_type > 2)fix->status.status = sensor_msgs::NavSatStatus::STATUS_FIX;else {ROS_WARN_THROTTLE_NAMED(30, "global_position", "GP: No GPS fix");fix->status.status = sensor_msgs::NavSatStatus::STATUS_NO_FIX;}fill_lla(raw_gps, fix);float eph = (raw_gps.eph != UINT16_MAX) ? raw_gps.eph / 1E2F : NAN;float epv = (raw_gps.epv != UINT16_MAX) ? raw_gps.epv / 1E2F : NAN;ftf::EigenMapCovariance3d gps_cov(fix->position_covariance.data());// With mavlink v2.0 use accuracies reported by sensorif (msg->magic == MAVLINK_STX &&raw_gps.h_acc > 0 && raw_gps.v_acc > 0) {gps_cov.diagonal() << std::pow(raw_gps.h_acc / 1E3, 2), std::pow(raw_gps.h_acc / 1E3, 2), std::pow(raw_gps.v_acc / 1E3, 2);fix->position_covariance_type = sensor_msgs::NavSatFix::COVARIANCE_TYPE_DIAGONAL_KNOWN;}// With mavlink v1.0 approximate accuracies by DOPelse if (!std::isnan(eph) && !std::isnan(epv)) {gps_cov.diagonal() << std::pow(eph * gps_uere, 2), std::pow(eph * gps_uere, 2), std::pow(epv * gps_uere, 2);fix->position_covariance_type = sensor_msgs::NavSatFix::COVARIANCE_TYPE_APPROXIMATED;}else {fill_unknown_cov(fix);}// store & publishm_uas->update_gps_fix_epts(fix, eph, epv, raw_gps.fix_type, raw_gps.satellites_visible);raw_fix_pub.publish(fix);if (raw_gps.vel != UINT16_MAX &&raw_gps.cog != UINT16_MAX) {double speed = raw_gps.vel / 1E2; // m/sdouble course = angles::from_degrees(raw_gps.cog / 1E2); // radauto vel = boost::make_shared<geometry_msgs::TwistStamped>();vel->header.stamp = fix->header.stamp;vel->header.frame_id = frame_id;// From nmea_navsat_drivervel->twist.linear.x = speed * std::sin(course);vel->twist.linear.y = speed * std::cos(course);raw_vel_pub.publish(vel);}// publish satellite countauto sat_cnt = boost::make_shared<std_msgs::UInt32>();sat_cnt->data = raw_gps.satellites_visible;raw_sat_pub.publish(sat_cnt);
}// 涉及子函数
void UAS::update_gps_fix_epts(sensor_msgs::NavSatFix::Ptr &fix,float eph, float epv,int fix_type, int satellites_visible)
{lock_guard lock(mutex);gps_fix = fix;gps_eph = eph;gps_epv = epv;gps_fix_type = fix_type;gps_satellites_visible = satellites_visible;
}
mavlink 消息定义 https://mavlink.io/zh/messages/common.html#GPS_RAW_INT。
注意这个原始消息携带的信息很多,被拆分转发到了多个 ROS 话题中。
| time_usec | uint64_t | us | Timestamp (UNIX Epoch time or time since system boot). The receiving end can infer timestamp format (since 1.1.1970 or since system boot) by checking for the magnitude of the number. | ||
|---|---|---|---|---|---|
| fix_type | uint8_t | GPS_FIX_TYPE | GPS fix type. | ||
| lat | int32_t | degE7 | Latitude (WGS84, EGM96 ellipsoid) | ||
| lon | int32_t | degE7 | Longitude (WGS84, EGM96 ellipsoid) | ||
| alt | int32_t | 毫米 | Altitude (MSL). Positive for up. Note that virtually all GPS modules provide the MSL altitude in addition to the WGS84 altitude. | ||
| eph | uint16_t | 1E-2 | invalid:UINT16_MAX | GPS HDOP horizontal dilution of position (unitless * 100). If unknown, set to: UINT16_MAX | |
| epv | uint16_t | 1E-2 | invalid:UINT16_MAX | GPS VDOP vertical dilution of position (unitless * 100). If unknown, set to: UINT16_MAX | |
| vel | uint16_t | 厘米/秒 | invalid:UINT16_MAX | GPS ground speed. If unknown, set to: UINT16_MAX | |
| cog | uint16_t | cdeg | invalid:UINT16_MAX | Course over ground (NOT heading, but direction of movement) in degrees * 100, 0.0…359.99 degrees. If unknown, set to: UINT16_MAX | |
| satellites_visible | uint8_t | invalid:UINT8_MAX | 可见卫星数量。 If unknown, set to UINT8_MAX | ||
| alt_ellipsoid ++ | int32_t | 毫米 | Altitude (above WGS84, EGM96 ellipsoid). Positive for up. | ||
| h_acc ++ | uint32_t | 毫米 | Position uncertainty. | ||
| v_acc ++ | uint32_t | 毫米 | Altitude uncertainty. | ||
| vel_acc ++ | uint32_t | 毫米/秒 | Speed uncertainty. | ||
| hdg_acc ++ | uint32_t | degE5 | Heading / track uncertainty | ||
| yaw ++ | uint16_t | cdeg | invalid:0 | Yaw in earth frame from north. Use 0 if this GPS does not provide yaw. Use UINT16_MAX if this GPS is configured to provide yaw and is currently unable to provide it. Use 36000 for north. |
/mavros/global_position/raw/fix,消息类型是 sensor_msgs/NavSatFix,定义如下
rosmsg show sensor\_msgs/NavSatFixuint8 COVARIANCE_TYPE_UNKNOWN=0
uint8 COVARIANCE_TYPE_APPROXIMATED=1
uint8 COVARIANCE_TYPE_DIAGONAL_KNOWN=2
uint8 COVARIANCE_TYPE_KNOWN=3
std_msgs/Header headeruint32 seqtime stampstring frame_id
sensor_msgs/NavSatStatus statusint8 STATUS_NO_FIX=-1int8 STATUS_FIX=0int8 STATUS_SBAS_FIX=1int8 STATUS_GBAS_FIX=2uint16 SERVICE_GPS=1uint16 SERVICE_GLONASS=2uint16 SERVICE_COMPASS=4uint16 SERVICE_GALILEO=8int8 statusuint16 service
float64 latitude
float64 longitude
float64 altitude
float64[9] position_covariance
uint8 position_covariance_type其中 float64 latitude,float64 longitude,float64 altitude 三个字段的赋值过程如下
fill_lla(raw_gps, fix);template<typename MsgT>
inline void fill_lla(MsgT &msg, sensor_msgs::NavSatFix::Ptr fix)
{fix->latitude = msg.lat / 1E7; // degfix->longitude = msg.lon / 1E7; // degfix->altitude = msg.alt / 1E3 + m_uas->geoid_to_ellipsoid_height(fix); // in meters
}/*** @brief Conversion from height above geoid (AMSL)* to height above ellipsoid (WGS-84)*/
template <class T>
inline double geoid_to_ellipsoid_height(T lla)
{if (egm96_5)return GeographicLib::Geoid::GEOIDTOELLIPSOID * (*egm96_5)(lla->latitude, lla->longitude);elsereturn 0.0;
}
这里看到经纬度由原始的整型转换到了常用的 degree,且海拔由 mavros 进行了一次转换
- AMSL(Above Mean Sea Level):即 “海平面高度”,是 GPS 等设备通常输出的高度。
- Ellipsoid Height:是相对于地球椭球体(如 WGS-84 椭球)的高度,是 GNSS 内部用来计算的位置。
- 它们之间的差值由地球重力模型(如EGM96)提供,称为大地水准面起伏(geoid undulation)。
总之输出的 ROS 话题符合 WGS-84。
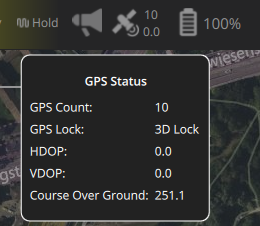
此外,原始 mavlink 消息包含了两个非常重要的信息,当前GPS锁定状态(QGC 中的 GPS Lock)和接收的卫星数(QGC 的 GPS Count)。他们对室外实物飞行有着重要意义,作为传感器与飞控融合算法状态是否良好的判断依据。
当前接收的卫星数量被转发到了另外的话题 /mavros/global_position/raw/satellites。
sat_cnt->data = raw_gps.satellites_visible;
raw_sat_pub.publish(sat_cnt);// 发布者定义如下
// raw_sat_pub = gp_nh.advertise<std_msgs::UInt32>("raw/satellites", 10);
当前GPS锁定状态,发布到了 /mavros/gpsstatus/gps1/raw。这个话题侧重对 GPS_RAW_INT 类型 mavlink 消息进行直接转发,不做任何处理。因此,是 /mavros/global_position/raw/satellites 的超集,和 /mavros/global_position/raw/fix 相比,同样是转发原始的未 ekf 融合的 GPS 数据,/mavros/gpsstatus/gps1/raw 没有对高度进行转发。
/* -*- callbacks -*- */
/*** @brief Publish <a href="https://mavlink.io/en/messages/common.html#GPS_RAW_INT">mavlink GPS_RAW_INT message</a> into the gps1/raw topic.*/
void handle_gps_raw_int(const mavlink::mavlink_message_t *msg, mavlink::common::msg::GPS_RAW_INT &mav_msg) {auto ros_msg = boost::make_shared<mavros_msgs::GPSRAW>();ros_msg->header = m_uas->synchronized_header("/wgs84", mav_msg.time_usec);ros_msg->fix_type = mav_msg.fix_type;ros_msg->lat = mav_msg.lat;ros_msg->lon = mav_msg.lon;ros_msg->alt = mav_msg.alt;ros_msg->eph = mav_msg.eph;ros_msg->epv = mav_msg.epv;ros_msg->vel = mav_msg.vel;ros_msg->cog = mav_msg.cog;ros_msg->satellites_visible = mav_msg.satellites_visible;ros_msg->alt_ellipsoid = mav_msg.alt_ellipsoid;ros_msg->h_acc = mav_msg.h_acc;ros_msg->v_acc = mav_msg.v_acc;ros_msg->vel_acc = mav_msg.vel_acc;ros_msg->hdg_acc = mav_msg.hdg_acc;ros_msg->dgps_numch = UINT8_MAX; // information not available in GPS_RAW_INT mavlink messageros_msg->dgps_age = UINT32_MAX;// information not available in GPS_RAW_INT mavlink messageros_msg->yaw = mav_msg.yaw;gps1_raw_pub.publish(ros_msg);
}
/mavros/global_position/global 的发布在源文件 mavros/mavros/src/plugins/global_position.cpp 中
// mavros/mavros/src/plugins/global_position.cpp/** @todo Handler for GLOBAL_POSITION_INT_COV */void handle_global_position_int(const mavlink::mavlink_message_t *msg, mavlink::common::msg::GLOBAL_POSITION_INT &gpos)
{auto odom = boost::make_shared<nav_msgs::Odometry>();auto fix = boost::make_shared<sensor_msgs::NavSatFix>();auto relative_alt = boost::make_shared<std_msgs::Float64>();auto compass_heading = boost::make_shared<std_msgs::Float64>();auto header = m_uas->synchronized_header(child_frame_id, gpos.time_boot_ms);// Global position fixfix->header = header;fill_lla(gpos, fix);// fill GPS status fields using GPS_RAW dataauto raw_fix = m_uas->get_gps_fix();if (raw_fix) {fix->status.service = raw_fix->status.service;fix->status.status = raw_fix->status.status;fix->position_covariance = raw_fix->position_covariance;fix->position_covariance_type = raw_fix->position_covariance_type;}else {// no GPS_RAW_INT -> fix status unknownfix->status.service = sensor_msgs::NavSatStatus::SERVICE_GPS;fix->status.status = sensor_msgs::NavSatStatus::STATUS_NO_FIX;// we don't know covariancefill_unknown_cov(fix);}relative_alt->data = gpos.relative_alt / 1E3; // in meterscompass_heading->data = (gpos.hdg != UINT16_MAX) ? gpos.hdg / 1E2 : NAN; // in degrees/*** @brief Global position odometry:** X: spherical coordinate X-axis (meters)* Y: spherical coordinate Y-axis (meters)* Z: spherical coordinate Z-axis (meters)* VX: latitude vel (m/s)* VY: longitude vel (m/s)* VZ: altitude vel (m/s)* Angular rates: unknown* Pose covariance: computed, with fixed diagonal* Velocity covariance: unknown*/odom->header.stamp = header.stamp;odom->header.frame_id = frame_id;odom->child_frame_id = child_frame_id;// Linear velocitytf::vectorEigenToMsg(Eigen::Vector3d(gpos.vy, gpos.vx, gpos.vz) / 1E2,odom->twist.twist.linear);// Velocity covariance unknownftf::EigenMapCovariance6d vel_cov_out(odom->twist.covariance.data());vel_cov_out.fill(0.0);vel_cov_out(0) = -1.0;// Current fix in ECEFEigen::Vector3d map_point;try {/*** @brief Conversion from geodetic coordinates (LLA) to ECEF (Earth-Centered, Earth-Fixed)** Note: "ecef_origin" is the origin of "map" frame, in ECEF, and the local coordinates are* in spherical coordinates, with the orientation in ENU (just like what is applied* on Gazebo)*/GeographicLib::Geocentric map(GeographicLib::Constants::WGS84_a(),GeographicLib::Constants::WGS84_f());/*** @brief Checks if the "map" origin is set.* - If not, and the home position is also not received, it sets the current fix as the origin;* - If the home position is received, it sets the "map" origin;* - If the "map" origin is set, then it applies the rotations to the offset between the origin* and the current local geocentric coordinates.*/// Current fix to ECEFmap.Forward(fix->latitude, fix->longitude, fix->altitude,map_point.x(), map_point.y(), map_point.z());// Set the current fix as the "map" origin if it's not setif (!is_map_init && fix->status.status >= sensor_msgs::NavSatStatus::STATUS_FIX) {map_origin.x() = fix->latitude;map_origin.y() = fix->longitude;map_origin.z() = fix->altitude;ecef_origin = map_point; // Local position is zerois_map_init = true;}}catch (const std::exception& e) {ROS_INFO_STREAM("GP: Caught exception: " << e.what() << std::endl);}// Compute the local coordinates in ECEFlocal_ecef = map_point - ecef_origin;// Compute the local coordinates in ENUtf::pointEigenToMsg(ftf::transform_frame_ecef_enu(local_ecef, map_origin), odom->pose.pose.position);/*** @brief By default, we are using the relative altitude instead of the geocentric* altitude, which is relative to the WGS-84 ellipsoid*/if (use_relative_alt)odom->pose.pose.position.z = relative_alt->data;odom->pose.pose.orientation = m_uas->get_attitude_orientation_enu();// Use ENU covariance to build XYZRPY covarianceftf::EigenMapConstCovariance3d gps_cov(fix->position_covariance.data());ftf::EigenMapCovariance6d pos_cov_out(odom->pose.covariance.data());pos_cov_out.setZero();pos_cov_out.block<3, 3>(0, 0) = gps_cov;pos_cov_out.block<3, 3>(3, 3).diagonal() <<rot_cov,rot_cov,rot_cov;// publishgp_fix_pub.publish(fix);gp_odom_pub.publish(odom);gp_rel_alt_pub.publish(relative_alt);gp_hdg_pub.publish(compass_heading);// TFif (tf_send) {geometry_msgs::TransformStamped transform;transform.header.stamp = odom->header.stamp;transform.header.frame_id = tf_frame_id;transform.child_frame_id = tf_child_frame_id;// setRotation()transform.transform.rotation = odom->pose.pose.orientation;// setOrigin()transform.transform.translation.x = odom->pose.pose.position.x;transform.transform.translation.y = odom->pose.pose.position.y;transform.transform.translation.z = odom->pose.pose.position.z;m_uas->tf2_broadcaster.sendTransform(transform);}
}
同样是通过 fill_lla 赋值,发布过程和 /mavros/global_position/raw/fix 类似,对海拔做了转换。
fill_lla(gpos, fix);template<typename MsgT>
inline void fill_lla(MsgT &msg, sensor_msgs::NavSatFix::Ptr fix)
{fix->latitude = msg.lat / 1E7; // degfix->longitude = msg.lon / 1E7; // degfix->altitude = msg.alt / 1E3 + m_uas->geoid_to_ellipsoid_height(fix); // in meters
}
总结一下:
- 卫星数和GPS锁定状态可以通过
/mavros/gpsstatus/gps1/raw获取; - 未经PX4融合估计的原始的经纬度海拔通过
/mavros/global_position/raw/fix(WGS-84)获取; - EKF 融合后的经纬度海拔通过
/mavros/global_position/global
获取(这个话题的频率实验会比仿真低很多。极端情况,如室内无卫星/GPS传感器异常或者数据跳变导致飞控拒绝融合时可能不会发布此消息)。
相关文章:
【PX4飞控】mavros gps相关话题分析,经纬度海拔获取方法,卫星数锁定状态获取方法
使用 ROS1-Noetic 和 mavros v1.20.1, 携带经纬度海拔的话题主要有三个: /mavros/global_position/raw/fix/mavros/gpsstatus/gps1/raw/mavros/global_position/global 查看 mavros 源码,来分析他们的发布过程。发现前两个话题都对应了同一…...

验证redis数据结构
一、功能验证 1.验证redis的数据结构(如字符串、列表、哈希、集合、有序集合等)是否按照预期工作。 2、常见的数据结构验证方法: ①字符串(string) 测试基本操作 set、get、incr、decr 验证字符串的长度和内容是否正…...

ubuntu中安装conda的后遗症
缘由: 在编译rk3588的sdk时,遇到编译buildroot失败,提示如下: 提示缺失expect,但是实测相关工具是在的,如下显示: 然后查找借助各个ai工具,重新安装相关的工具,依然无解。 解决&am…...

算法250609 高精度
加法 #include<stdio.h> #include<iostream> #include<string.h> #include<math.h> #include<algorithm> using namespace std; char input1[205]; char input2[205]; int main(){while(scanf("%s%s",input1,input2)!EOF){int a[205]…...
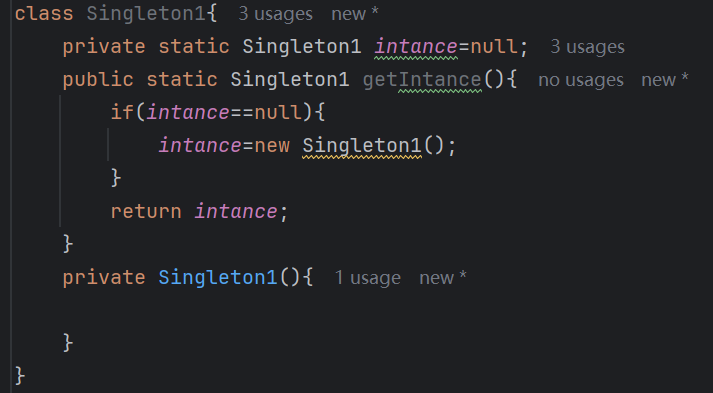
【Java多线程从青铜到王者】单例设计模式(八)
wait和sleep的区别 我们的wait也是提供了一个还有超时时间的版本,sleep也是可以指定时间的,也就是说时间一到就会解除阻塞,继续执行 wait和sleep都能被提前唤醒(虽然时间还没有到也可以提前唤醒),wait能被notify提前唤醒…...

【java】【服务器】线程上下文丢失 是指什么
目录 ■前言 ■正文开始 线程上下文的核心组成部分 为什么会出现上下文丢失? 直观示例说明 为什么上下文如此重要? 解决上下文丢失的关键 总结 ■如果我想在servlet中使用线程,代码应该如何实现 推荐方案:使用 ManagedE…...

FTXUI::Dom 模块
DOM 模块定义了分层的 FTXUI::Element 树,可用于构建复杂的终端界面,支持响应终端尺寸变化。 namespace ftxui {...// 定义文档 定义布局盒子 Element document vbox({// 设置文本 设置加粗 设置文本颜色text("The window") | bold | color(…...

嵌入式面试常问问题
以下内容面向嵌入式/系统方向的初学者与面试备考者,全面梳理了以下几大板块,并在每个板块末尾列出常见的面试问答思路,帮助你既能夯实基础,又能应对面试挑战。 一、TCP/IP 协议 1.1 TCP/IP 五层模型概述 链路层(Link Layer) 包括网卡驱动、以太网、Wi‑Fi、PPP 等。负责…...
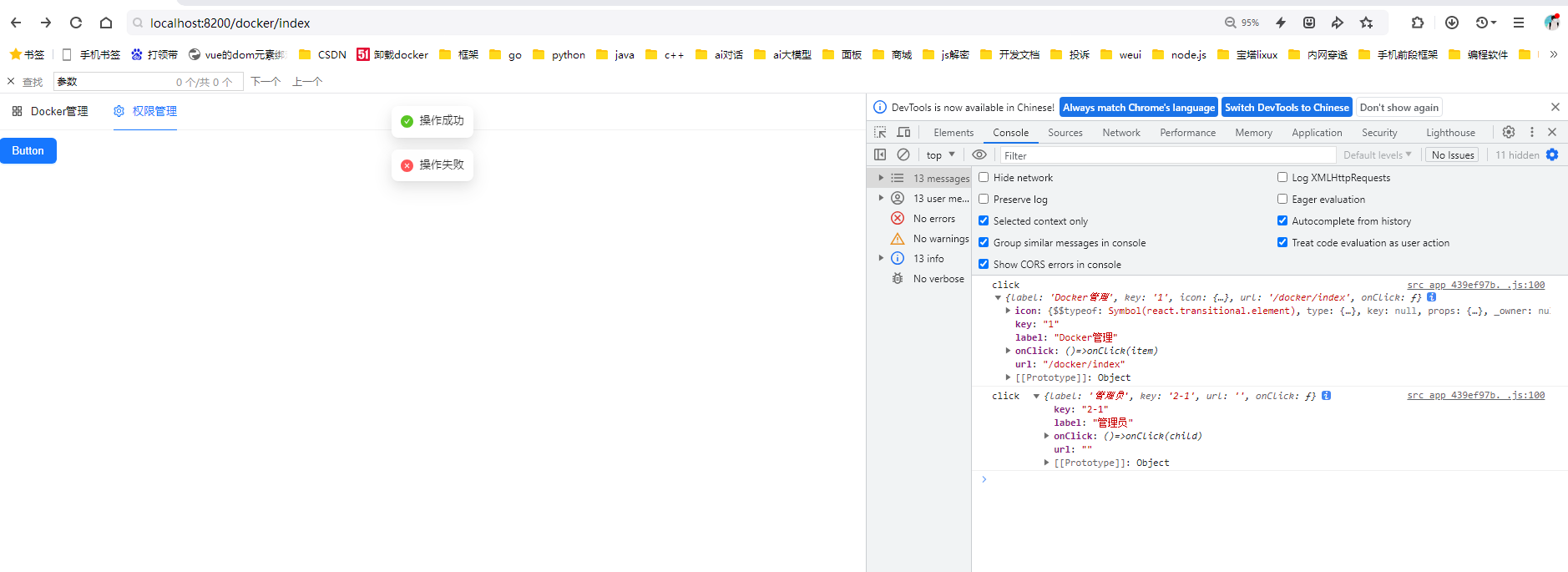
react菜单,动态绑定点击事件,菜单分离出去单独的js文件,Ant框架
1、菜单文件treeTop.js // 顶部菜单 import { AppstoreOutlined, SettingOutlined } from ant-design/icons; // 定义菜单项数据 const treeTop [{label: Docker管理,key: 1,icon: <AppstoreOutlined />,url:"/docker/index"},{label: 权限管理,key: 2,icon:…...

GeoServer发布PostgreSQL图层后WFS查询无主键字段
在使用 GeoServer(版本 2.22.2) 发布 PostgreSQL(PostGIS)中的表为地图服务时,常常会遇到一个小问题: WFS 查询中,主键字段(如 id)莫名其妙地消失了! 即使你在…...
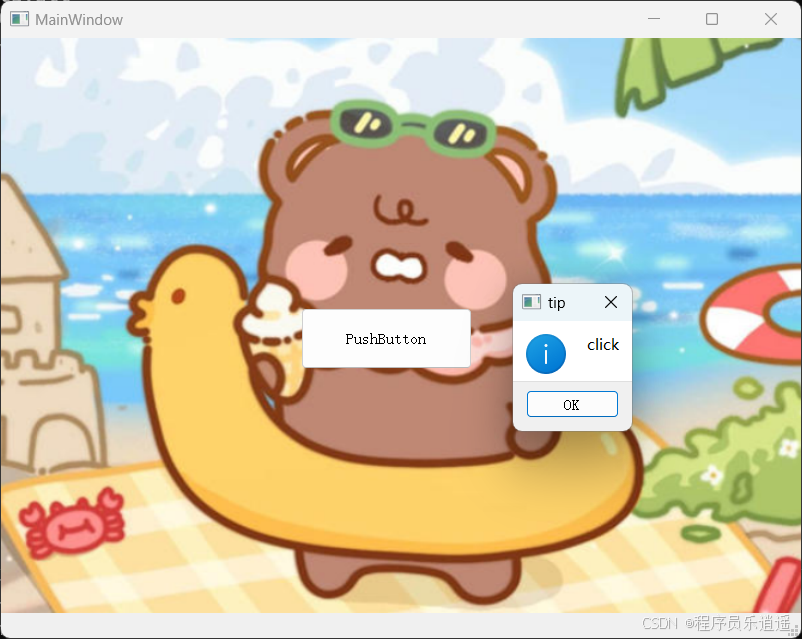
VSCode 使用CMake 构建 Qt 5 窗口程序
首先,目录结构如下图: 运行效果: cmake -B build cmake --build build 运行: windeployqt.exe F:\testQt5\build\Debug\app.exe main.cpp #include "mainwindow.h"#include <QAppli...

Win系统权限提升篇UAC绕过DLL劫持未引号路径可控服务全检项目
应用场景: 1、常规某个机器被钓鱼后门攻击后,我们需要做更高权限操作或权限维持等。 2、内网域中某个机器被钓鱼后门攻击后,我们需要对后续内网域做安全测试。 #Win10&11-BypassUAC自动提权-MSF&UACME 为了远程执行目标的exe或者b…...

Qwen系列之Qwen3解读:最强开源模型的细节拆解
文章目录 1.1分钟快览2.模型架构2.1.Dense模型2.2.MoE模型 3.预训练阶段3.1.数据3.2.训练3.3.评估 4.后训练阶段S1: 长链思维冷启动S2: 推理强化学习S3: 思考模式融合S4: 通用强化学习 5.全家桶中的小模型训练评估评估数据集评估细节评估效果弱智评估和民间Arena 分析展望 如果…...

虚幻基础:角色旋转
能帮到你的话,就给个赞吧 😘 文章目录 移动组件使用控制器所需旋转:组件 使用 控制器旋转将旋转朝向运动:组件 使用 移动方向旋转 控制器旋转和移动旋转 缺点移动旋转:必须移动才能旋转,不移动不旋转控制器…...

RushDB开源程序 是现代应用程序和 AI 的即时数据库。建立在 Neo4j 之上
一、软件介绍 文末提供程序和源码下载 RushDB 改变了您处理图形数据的方式 — 不需要 Schema,不需要复杂的查询,只需推送数据即可。 二、Key Features ✨ 主要特点 Instant Setup: Be productive in seconds, not days 即时设置 :在几秒钟…...

StarRocks 全面向量化执行引擎深度解析
StarRocks 全面向量化执行引擎深度解析 StarRocks 的向量化执行引擎是其高性能的核心设计,相比传统行式处理引擎(如MySQL),性能可提升 5-10倍。以下是分层拆解: 1. 向量化 vs 传统行式处理 维度行式处理向量化处理数…...

SQL进阶之旅 Day 22:批处理与游标优化
【SQL进阶之旅 Day 22】批处理与游标优化 文章简述(300字左右) 在数据库开发中,面对大量数据的处理任务时,单条SQL语句往往无法满足性能需求。本篇文章聚焦“批处理与游标优化”,深入探讨如何通过批量操作和游标技术提…...

深度解析云存储:概念、架构与应用实践
在数据爆炸式增长的时代,传统本地存储因容量限制、管理复杂等问题,已难以满足企业和个人的需求。云存储凭借灵活扩展、便捷访问等特性,成为数据存储领域的主流解决方案。从个人照片备份到企业核心数据管理,云存储正重塑数据存储与…...
)
stm32进入Infinite_Loop原因(因为有系统中断函数未自定义实现)
这是系统中断服务程序的默认处理汇编函数,如果我们没有定义实现某个中断函数,那么当stm32产生了该中断时,就会默认跑这里来了,所以我们打开了什么中断,一定要记得实现对应的系统中断函数,否则会进来一直循环…...

C++ 类基础:封装、继承、多态与多线程模板实现
前言 C 是一门强大的面向对象编程语言,而类(Class)作为其核心特性之一,是理解和使用 C 的关键。本文将深入探讨 C 类的基本特性,包括封装、继承和多态,同时讨论类中的权限控制,并展示如何使用类…...
表单设计器拖拽对象时添加属性
背景:因为项目需要。自写设计器。遇到的坑在此记录 使用的拖拽组件时vuedraggable。下面放上局部示例截图。 坑1。draggable标签在拖拽时可以获取到被拖拽的对象属性定义 要使用 :clone, 而不是clone。我想应该是因为draggable标签比较特。另外在使用**:clone时要将…...

简单介绍C++中 string与wstring
在C中,string和wstring是两种用于处理不同字符编码的字符串类型,分别基于char和wchar_t字符类型。以下是它们的详细说明和对比: 1. 基础定义 string 类型:std::string 字符类型:char(通常为8位)…...

CSS 工具对比:UnoCSS vs Tailwind CSS,谁是你的菜?
在现代前端开发中,Utility-First (功能优先) CSS 框架已经成为主流。其中,Tailwind CSS 无疑是市场的领导者和标杆。然而,一个名为 UnoCSS 的新星正以其惊人的性能和极致的灵活性迅速崛起。 这篇文章将深入探讨这两款工具的核心理念、技术差…...

Yii2项目自动向GitLab上报Bug
Yii2 项目自动上报Bug 原理 yii2在程序报错时, 会执行指定action, 通过重写ErrorAction, 实现Bug自动提交至GitLab的issue 步骤 配置SiteController中的actions方法 public function actions(){return [error > [class > app\helpers\web\ErrorAction,],];}重写Error…...
)
背包问题双雄:01 背包与完全背包详解(Java 实现)
一、背包问题概述 背包问题是动态规划领域的经典问题,其核心在于如何在有限容量的背包中选择物品,使得总价值最大化。根据物品选择规则的不同,主要分为两类: 01 背包:每件物品最多选 1 次(选或不选&#…...

Python第七周作业
Python第七周作业 文章目录 Python第七周作业 1.使用open以只读模式打开文件data.txt,并逐行打印内容 2.使用pathlib模块获取当前脚本的绝对路径,并创建logs目录(若不存在) 3.递归遍历目录data,输出所有.csv文件的路径…...
Qt的学习(二)
1. 创建Hello Word 两种方式,实现helloworld: 1.通过图形化的方式,在界面上创建出一个控件,显示helloworld 2.通过纯代码的方式,通过编写代码,在界面上创建控件, 显示hello world; …...

算法刷题-回溯
今天给大家分享的还是一道关于dfs回溯的问题,对于这类问题大家还是要多刷和总结,总体难度还是偏大。 对于回溯问题有几个关键点: 1.首先对于这类回溯可以节点可以随机选择的问题,要做mian函数中循环调用dfs(i&#x…...
工厂方法模式和抽象工厂方法模式的battle
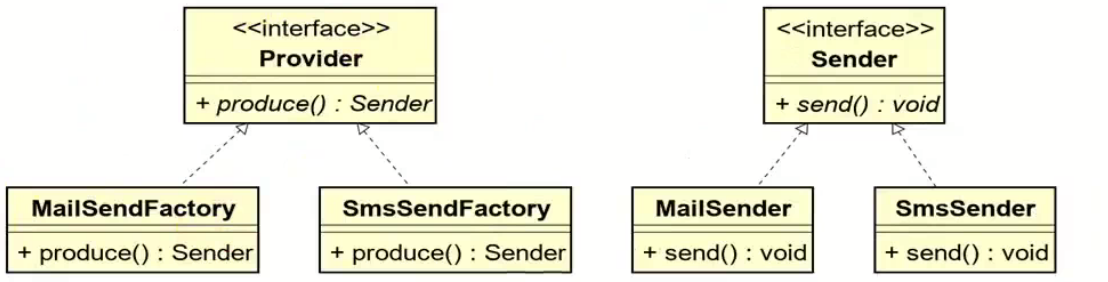
1.案例直接上手 在这个案例里面,我们会实现这个普通的工厂方法,并且对比这个普通工厂方法和我们直接创建对象的差别在哪里,为什么需要一个工厂: 下面的这个是我们的这个案例里面涉及到的接口和对应的实现类: 两个发…...

深入解析 ReentrantLock:原理、公平锁与非公平锁的较量
ReentrantLock 是 Java 中 java.util.concurrent.locks 包下的一个重要类,用于实现线程同步,支持可重入性,并且可以选择公平锁或非公平锁的实现方式。下面将详细介绍 ReentrantLock 的实现原理以及公平锁和非公平锁的区别。 ReentrantLock 实现原理 基本架构 ReentrantLo…...