【yolov8语义分割】跑通:下载yolov8+预测图片+预测视频
1、下载yolov8到autodl上
git clone https://github.com/ultralytics/ultralytics

下载到Yolov8文件夹下面
另外:现在yolov8支持像包一样导入,pip install就可以
2、yolov8 语义分割文档
看官方文档:主页 -Ultralytics YOLO 文档
还能切换成中文版本,真友好。
看以下yolov8语义分割的文档:Segment - Ultralytics YOLO Docs
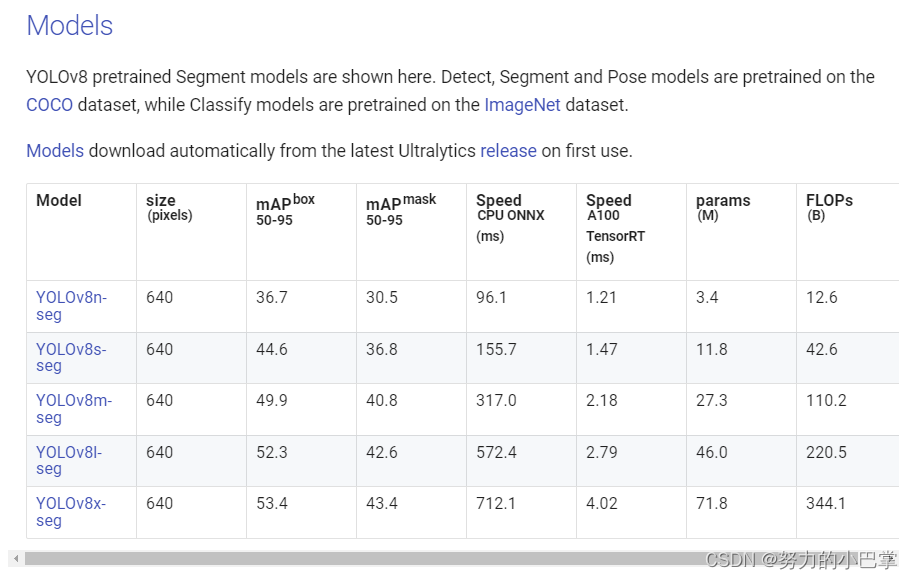
YOLOv8 Segment 模型使用 -seg 后缀,比如 yolov8n-seg.pt ,然后官方是在 COCO数据集上进行预训练。
不同yolov8分割模型的参数:
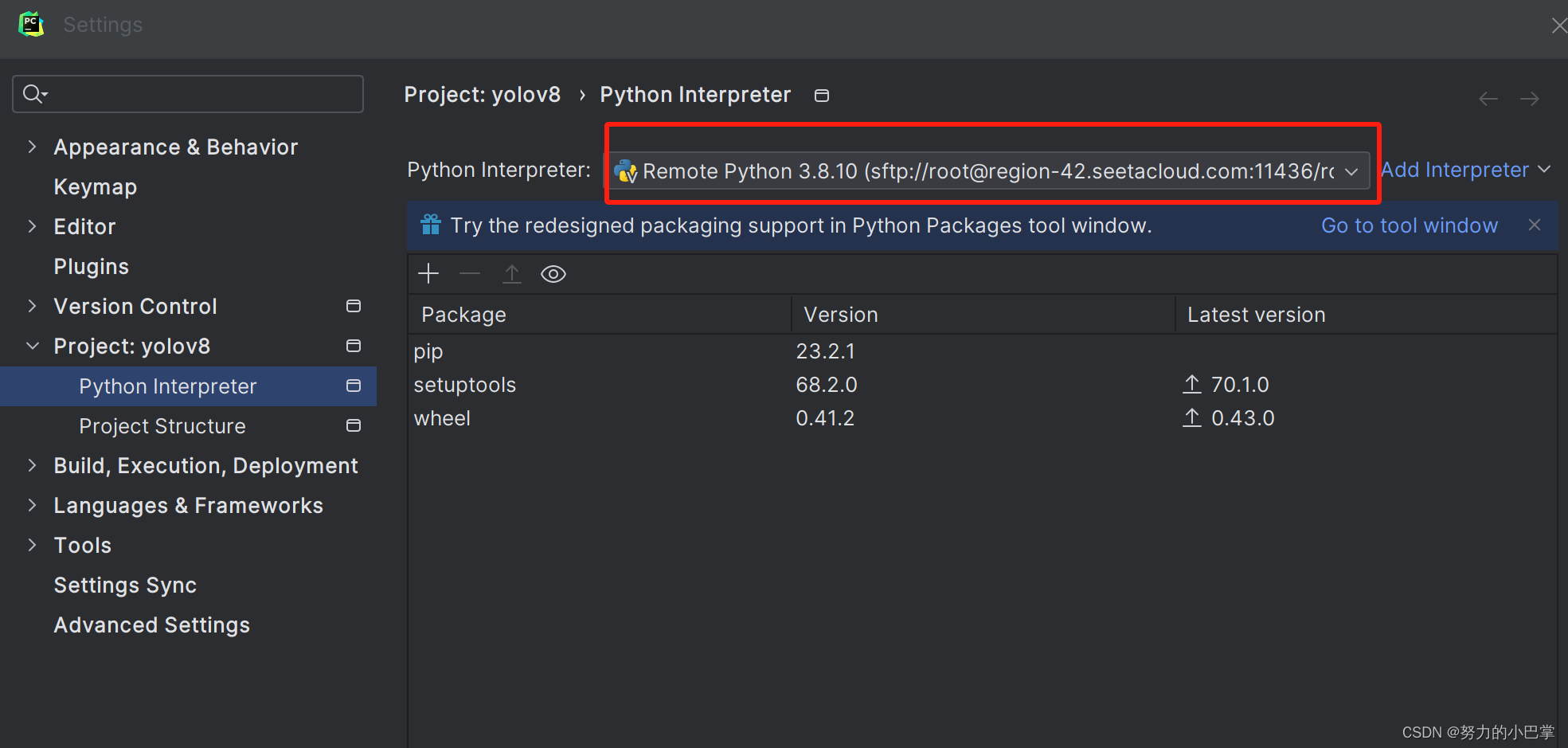
用pycharm连接远程服务器:
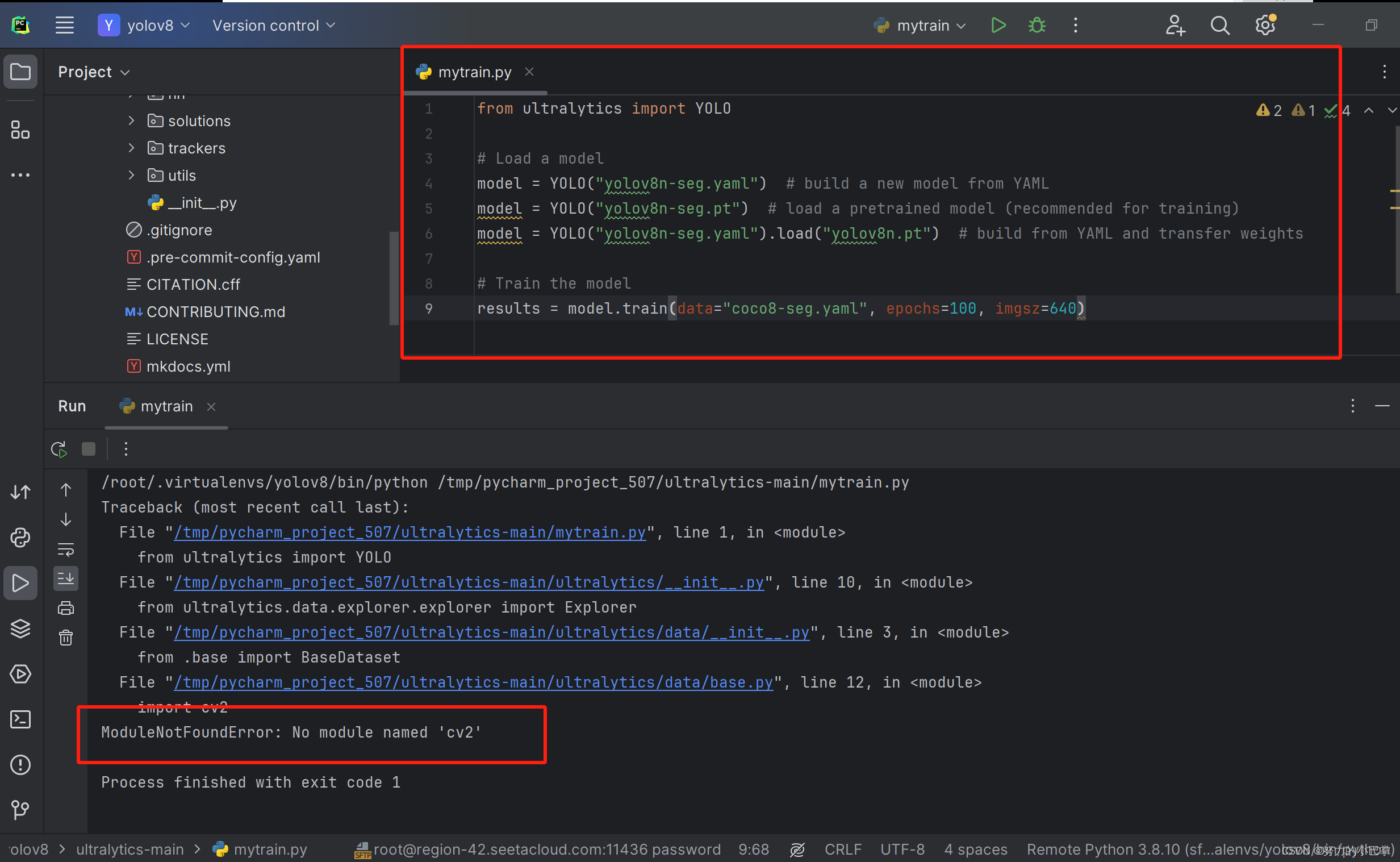
然后,我根据官方提示,在根目录下面都没有这个模块,查了下,说yolov8都没有requiment.txt的文档,他是把所有东西都放在ultralytics包下面,所以直接pip install ultralytics,那么,在下这个包之前,先在autodl上面,新建一个虚拟环境,把项目的包直接下载在这里面,不然就会出现如下提示:

创建虚拟环境,名字是yolov8
root@autodl-container-97b611a952-679739f5:~# python -m venv yolov8
root@autodl-container-97b611a952-679739f5:~# source yolov8/bin/activate
(yolov8) root@autodl-container-97b611a952-679739f5:~# pip list
然后提示我pip要更新了,根据提示去更新先:
 更新好了,现在也在yolov8虚拟环境下了。
更新好了,现在也在yolov8虚拟环境下了。
我在autodl上,把yolov8下载在Yolov8文件夹下面的1:
所以,我先进入这个文件夹下
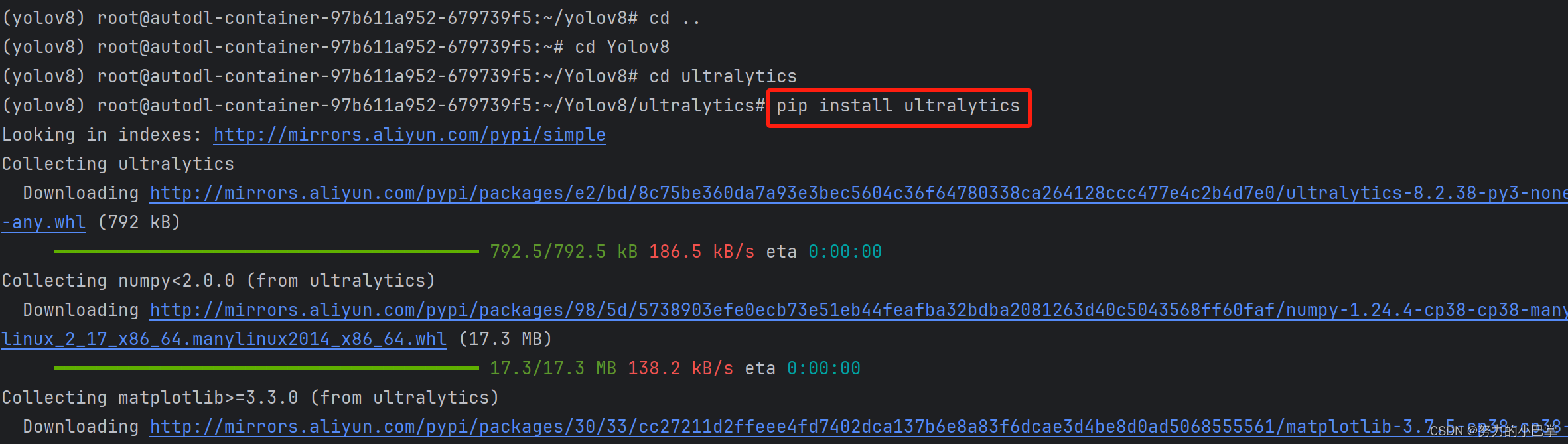
(yolov8) root@autodl-container-97b611a952-679739f5:~# cd Yolov8
(yolov8) root@autodl-container-97b611a952-679739f5:~/Yolov8# cd ultralytics
好了,开始吧!
1、先下载:pip install ultralytics,这一步就相当于之前安装requirements,现在是都放在ultralytics下面了。
2、载入刚刚下载的ultralytics
如果是在终端打开的,记得,先进入python
import ultralytics
import torch
torch.cuda.is_available() #检查torch是否可用,返回true才意味着可以用torch,在gpu打开
先直接进行预测
中间下载torch的时候突然跳出去了,然后重新进入yolov8的虚拟环境,一定注意是root目录下的,也就是说,在哪个目录下创建的虚拟环境,就从哪里进入,
source yolov8/bin/activate
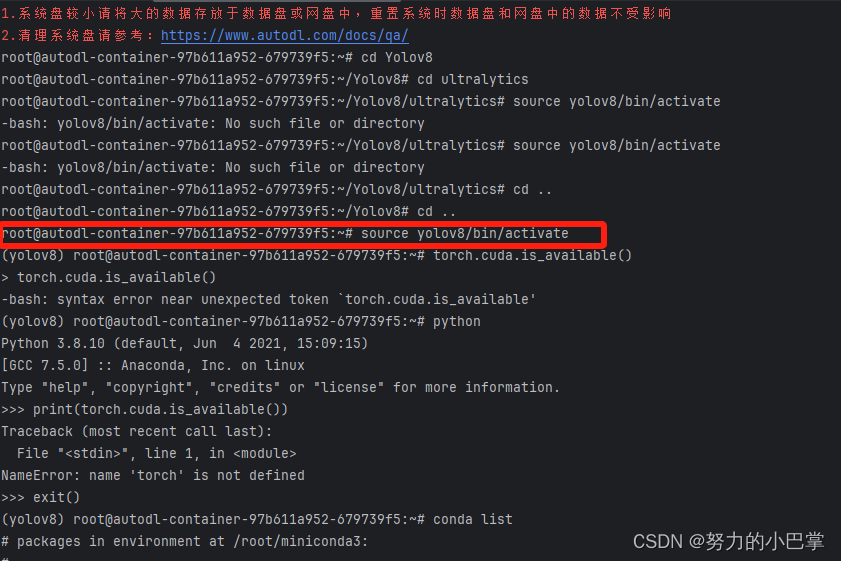
然后conda list 看看有没有安装好yolov8
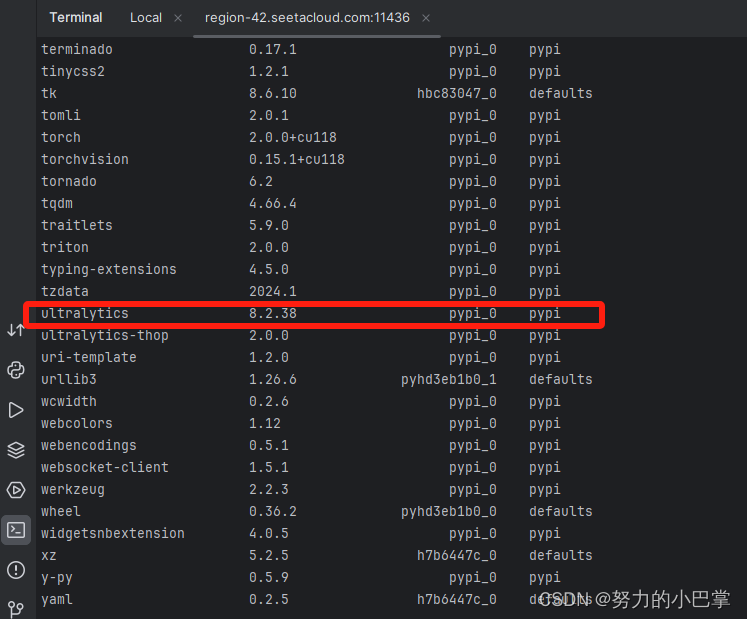
可以看到安装了。
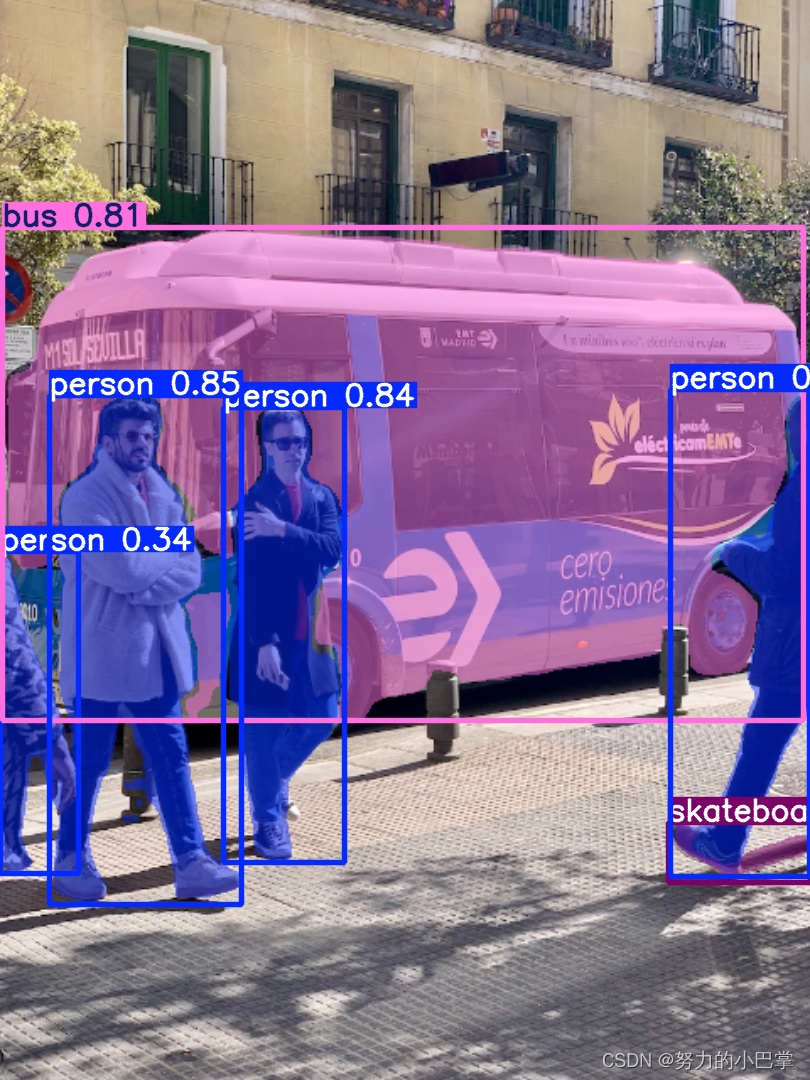
现在先用官方给的图片,预测一张图的语义分割,看看什么效果:
yolo segment predict model=yolov8n-seg.pt source='https://ultralytics.com/images/bus.jpg'
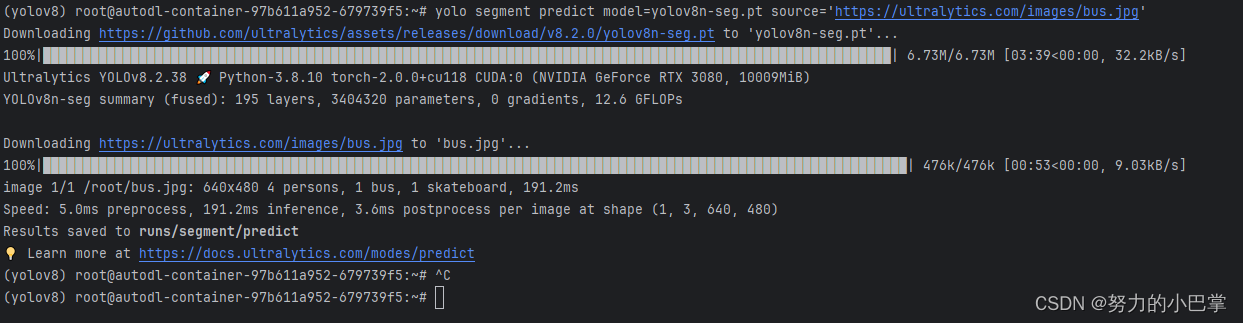
可以看到,她是先下载了yolov8n-seg.pt模型,存在根目录下,然后,直接下载网站的图片,对bus这个图进行预测。注意存放位置。
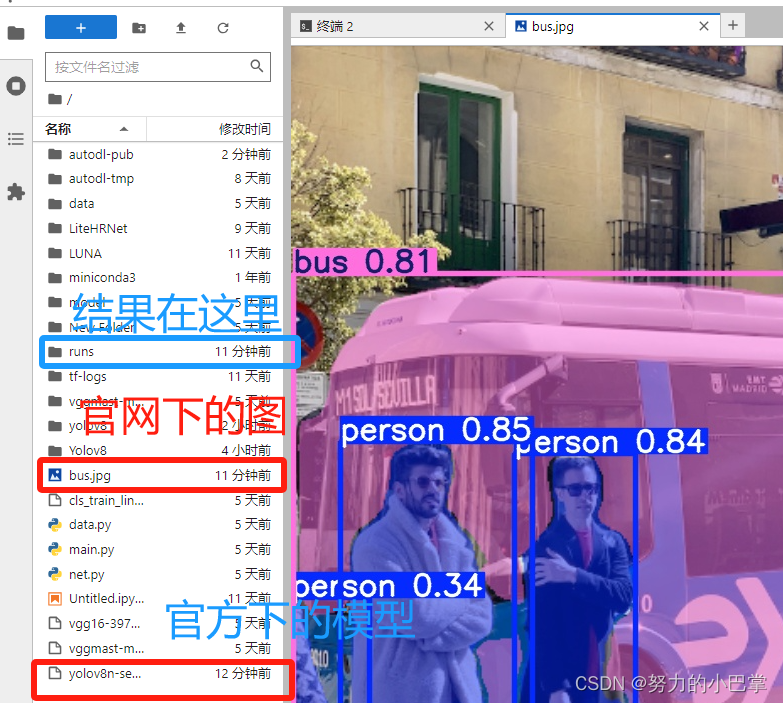
她还给出了预测的结果,说有4个人一个bus,还有191.2ms的预测时间
然后它说,图片存在runs下面的segment下面的predict了
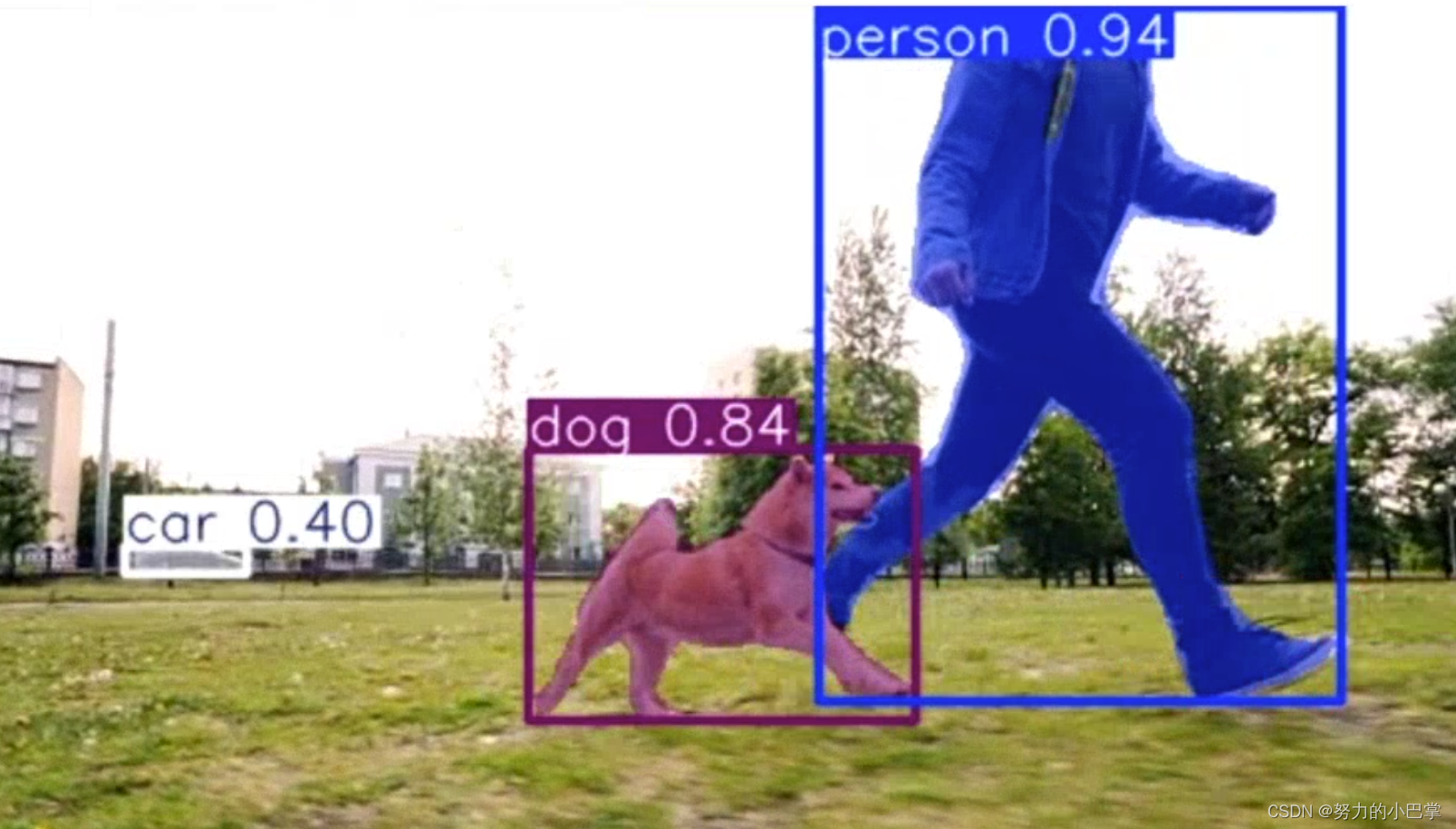
那现在用自己的图片试一下:
模型就不变了,换个图,注意这个目录一定是对应autodl上的目录分布,
yolo segment predict model=yolov8n-seg.pt source='./gettyimages.jpg'

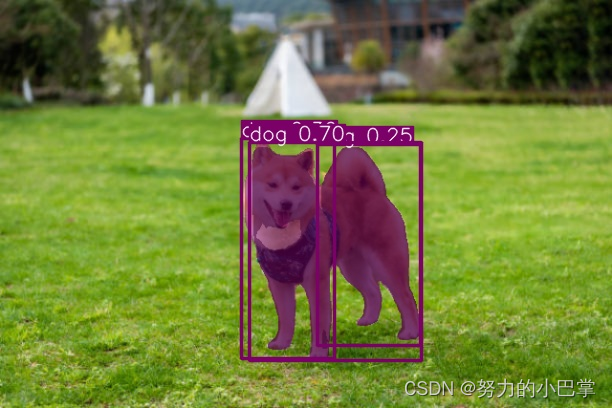
结果是这样的。
yolov8还能实时预测摄像头:看一看(运行不了)
yolo segment predict model=yolov8n-seg.pt source=0
从yotube下载视频看看:(报错)
先下载包
sudo apt update sudo apt install youtube-dl
pip3 install --upgrade youtube-dl
youtube-dl https://www.youtube.com/watch?v=Fw3MdwjPyHA -f bestvideo[ext=mp4]+bestaudio[ext=m4a]/mp4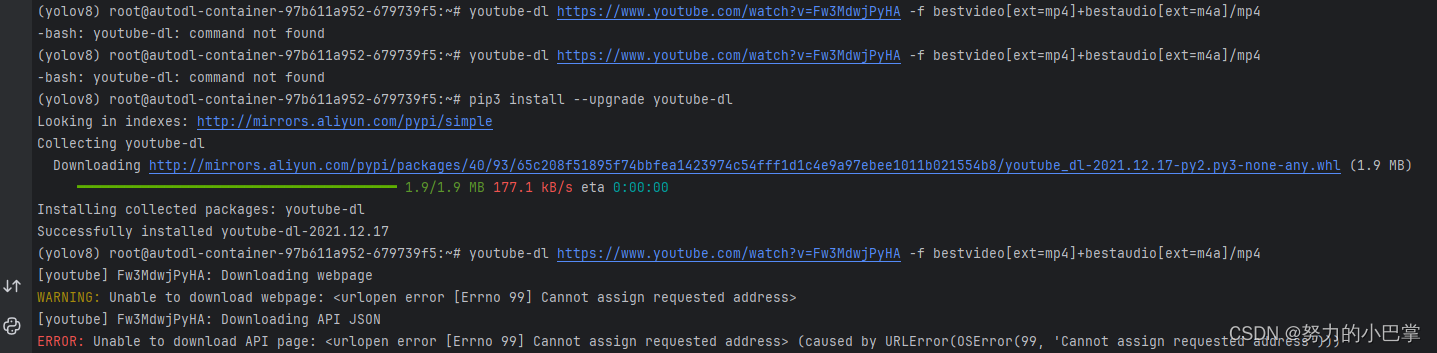
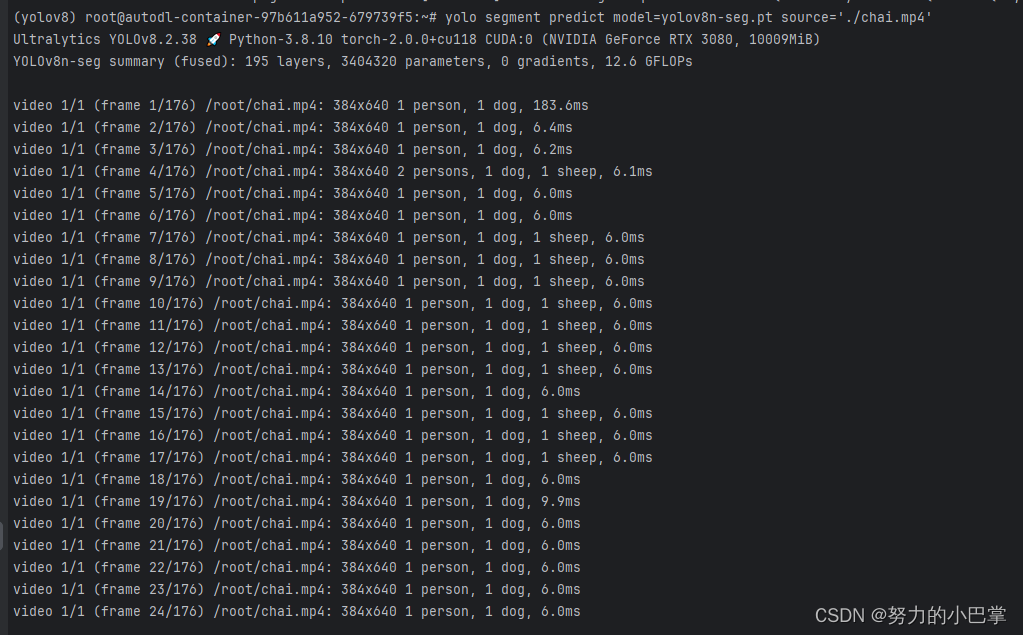
算了,直接看看本地视频mp4吧:
avi格式怎么看视频?
截取一帧:
相关文章:
【yolov8语义分割】跑通:下载yolov8+预测图片+预测视频
1、下载yolov8到autodl上 git clone https://github.com/ultralytics/ultralytics 下载到Yolov8文件夹下面 另外:现在yolov8支持像包一样导入,pip install就可以 2、yolov8 语义分割文档 看官方文档:主页 -Ultralytics YOLO 文档 还能切…...

基于STM8系列单片机驱动74HC595驱动两个3位一体的数码管
1)单片机/ARM硬件设计小知识,分享给将要学习或者正在学习单片机/ARM开发的同学。 2)内容属于原创,若转载,请说明出处。 3)提供相关问题有偿答疑和支持。 为了节省单片机MCU的IO口资源驱动6个数码管&…...

Jlink下载固件到RAM区
Jlink下载固件到RAM区 准备批处理搜索exe批处理读取bin数据解析调用jlink批处理准备jlink脚本 调用执行 环境:J-Flash V7.96g 平台:arm cortex-m3 准备批处理 搜索exe批处理 find_file.bat echo off:: 自动识别脚本名和路径 set "SCRIPT_DIR%~dp…...

Kotlin基础——Typeclass
高阶类型 如在Iterable新增泛型方法时 interface Iterable<T> {fun filter(p: (T) -> Boolean): Iterable<T>fun remove(p: (T) -> Boolean): Iterable<T> filter { x -> !p(x) } }对应的List、Set实现上述方法时仍需要返回具体的类型 interfac…...

DC-DC 高压降压、非隔离AC-DC、提供强大的动力,选择优质电源芯片-(昱灿)
畅享长续航,尽在我们的充电芯片! 无论是手机、平板还是智能设备,长时间使用后电量不足总是令人头疼。然而,我们的充电芯片将为您带来全新的充电体验!采用先进的技术,我们的充电芯片能够提供快速而稳定的充电…...

GPT-4o的视觉识别能力,将绕过所有登陆的图形验证码
知识星球🔗除了包含技术干货:《Java代码审计》《Web安全》《应急响应》《护网资料库》《网安面试指南》还包含了安全中常见的售前护网案例、售前方案、ppt等,同时也有面向学生的网络安全面试、护网面试等。 我们来看一下市面上常见的图形验证…...

【LinuxC语言】进程间的通信——管道
文章目录 前言不同进程间通信的方式管道匿名管道和命名管道半双工与全双工管道相关函数创建管道总结前言 在Linux操作系统中,进程是执行中的程序的实例。每个进程都有自己的地址空间,数据栈以及其他用于跟踪进程执行的辅助数据。操作系统管理这些进程,并通过调度算法来分享…...
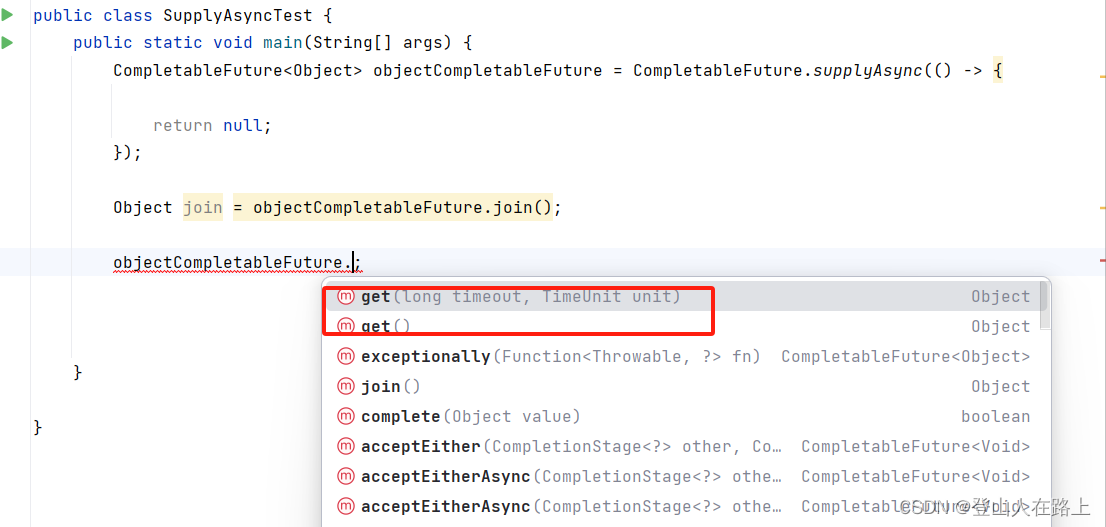
CompletableFuture 基本用法
一、 CompletableFuture简介 CompletableFuture 是 Java 8 引入的一个功能强大的类,用于异步编程和并发处理。它提供了丰富的 API 来处理异步任务的结果,支持函数式编程风格,并允许通过链式调用组合多个异步操作。 二、CompletableFuture中…...

网页如何发布到服务器上
将网页发布到服务器上的过程涉及多个步骤,包括准备阶段、选择托管提供商、发布网站等。12 准备阶段: 确保在本地开发环境中对网站进行了充分的测试,包括功能测试、性能测试和安全测试。 检查Web.config文件,确保所有的配置设置…...

Jenkins简要说明
Jenkins 是一个开源的持续集成和持续部署(CI/CD)工具,广泛用于自动化软件开发过程中的构建、测试和部署等任务。它是基于Java开发的,因此可以在任何支持Java的平台上运行,并且能够与各种操作系统、开发工具和插件无缝集…...

C# 比较基础知识:最佳实践和技巧
以下是一些在 C# 中进行比较的技巧和窍门的概述。 1. 比较原始类型 对于原始类型(int、double、char 等),可以使用标准比较运算符。 int a 5; int b 10; bool isEqual (a b); // false bool isGreater (a > b); // false bool is…...

Ansible 自动化运维实践
随着 IT 基础设施的复杂性不断增加,手动运维已无法满足现代企业对高效、可靠的 IT 运维需求。Ansible 作为一款开源的自动化运维工具,通过简洁易用的 YAML 语法和无代理(agentless)架构,极大简化了系统配置管理、应用部…...

红队攻防渗透技术实战流程:中间件安全:IISNGINXAPACHETOMCAT
红队攻防渗透实战 1. 中间件安全1.1 中间件-IIS-短文件&解析&蓝屏等1.2 中间件-Nginx-文件解析&命令执行等1.2.1 后缀解析 文件名解析1.2.2 cve_2021_23017 无EXP有POC1.2.3 cve_2017_7529 意义不大1.3 中间件-Apache-RCE&目录遍历&文件解析等1.3.1 cve_20…...

如何卸载宝塔面板?
宝塔官方有提供宝塔面板的卸载命令,使用这个卸载命令,我们就能将宝塔面板卸载掉。 这里有一点需要注意的,如果卸载宝塔面板的同时,也希望将 Nginx、MySQL、PHP 等组件卸载掉,那么我们应该先在宝塔面板里面卸载掉以上软…...
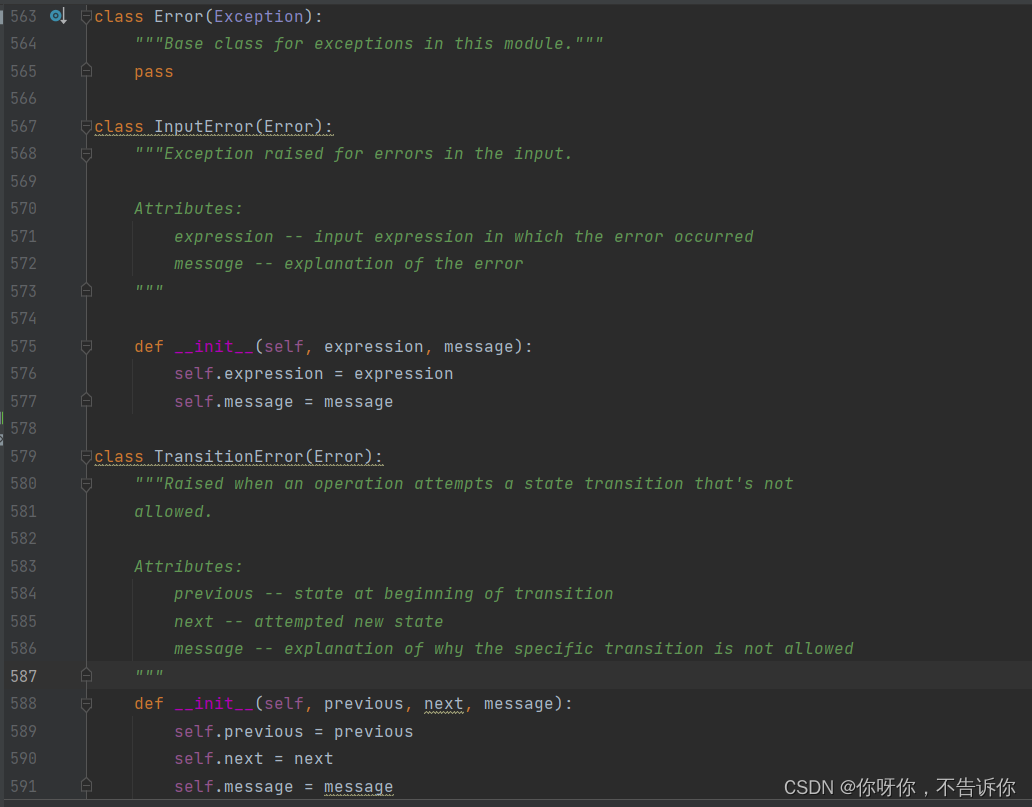
python入门基础知识(错误和异常)
本文部分内容来自菜鸟教程Python 基础教程 | 菜鸟教程 (runoob.com) 本人负责概括总结代码实现。 以此达到快速复习目的 目录 语法错误 异常 异常处理 try/except try/except...else try-finally 语句 抛出异常 用户自定义异常 内置异常类型 常见的标准异常类型 语法…...

迈巴赫S480升级增强现实AR抬头显示hud比普通抬头显示HUD更好用吗
增强AR实景抬头显示HUD(Augmented Reality Head-Up Display)是一种更高级的驾驶辅助技术,相比于普通抬头显示HUD,它提供了更丰富、更具沉浸感的驾驶体验。以下是它比普通抬头显示HUD多的一些功能: • 信息呈现方式&am…...
vivado、vitis2022安装及其注意事项(省时、省空间)
1、下载 AMD官网-资源与支持-vivado ML开发者工具,或者vitis平台, 下载的时候有个官网推荐web安装,亲测这个耗时非常久,不建议使用,还是直接下载89G的安装包快。 注意:安装vitis平台会默认安装vivado&…...

【自动驾驶】ROS小车系统
文章目录 小车组成轮式运动底盘的组成轮式运动底盘的分类轮式机器人的控制方式感知传感器ROS决策主控ROS介绍ROS的坐标系ROS的单位机器人电气连接变压模块运动底盘的电气连接ROS主控与传感器的电气连接ROS主控和STM32控制器两种控制器的功能运动底盘基本组成电池电机控制器与驱…...

mysql学习——多表查询
多表查询 内连接外连接自连接自连接查询联合查询 子查询 学习黑马MySQL课程,记录笔记,用于复习。 添加外键 alter table emp add constraint fk_emp_dept_id foreign key (dept_id) references dept(id);多表查询 select * from emp , dept where emp…...
【Gradio】如何设置 Gradio 数据框的样式
简介 数据可视化是数据分析和机器学习的关键方面。Gradio DataFrame 组件是一种流行的方式,在网络应用程序中显示表格数据(特别是以 pandas DataFrame 对象的形式)。 本文将探讨 Gradio 的最新增强功能,这些功能允许用户整合 pand…...

记录复现多模态大模型论文OPERA的一周工作
一、 什么是 AI Skills:从工具级到框架级的演化 AI Skills(AI 技能) 的概念最早在 Claude Code 等前沿 Agent 实践中被强化。最初,Skills 被视为“工具级”的增强,如简单的文件读写或终端操作,方便用户快速…...

Godot资源解包利器:零基础掌握游戏资产提取技术
Godot资源解包利器:零基础掌握游戏资产提取技术 【免费下载链接】godot-unpacker godot .pck unpacker 项目地址: https://gitcode.com/gh_mirrors/go/godot-unpacker godot-unpacker是一款专为Godot引擎设计的资源解包(Resource Extraction&…...

用 C# 写一个完整的 ReAct 智能体:从命令行输入到任务完成的全链路拆解
一、中间件是啥?咱用“餐厅”打个比方 想象一下,你的FastAPI应用是个高级餐厅。 ?? 顾客(客户端请求)来到门口。- 迎宾(CORS中间件):先看你是不是从允许的街区(域名)来…...

网站 SEO 优化推广需要分阶段投入资金吗
网站 SEO 优化推广需要分阶段投入资金吗 在当今数字化时代,网站 SEO 优化推广已经成为企业获取在线流量和提升品牌知名度的关键手段。无论是小型创业公司还是大型企业,对于网站 SEO 优化推广的投入都是必不可少的。这种投入资金是否需要分阶段进行呢&am…...

PE结构 ---> 9.RvaToFoa 内存状体到文件状态
目录 1. 为什么必须进行 RVA → FOA 转换?(核心矛盾) 2. 磁盘布局 vs 内存布局(对比详解) 3. RVA、VA、FOA 精确定义与关系 4. RvaToFoa 函数完整技术详解(核心算法) 5. 实战案例ÿ…...

3分钟掌握yt-dlp-gui:免费开源的视频下载终极解决方案
3分钟掌握yt-dlp-gui:免费开源的视频下载终极解决方案 【免费下载链接】yt-dlp-gui Windows GUI for yt-dlp 项目地址: https://gitcode.com/gh_mirrors/yt/yt-dlp-gui 在数字内容日益丰富的今天,如何高效地下载和保存网络视频成为了许多用户的迫…...

MaixinVoiceAI 3.0 助力高校后勤报修自动化
在校园规模不断扩大、后勤服务需求持续攀升的当下,报修服务已成为高校保障教学秩序、提升师生满意度、塑造校园管理口碑的关键环节。但现实中,高校后勤报修体系普遍面临诸多难题:报修渠道分散、响应不及时,师生需反复描述故障情况…...

从一次jar包热修复踩坑,聊聊Spring Boot的可执行jar原理
从一次jar包热修复踩坑,聊聊Spring Boot的可执行jar原理 那天下午,服务器突然告警,线上服务开始频繁报错。排查后发现是MyBatis的一个XML映射文件存在逻辑缺陷,导致数据库查询结果异常。按照常规流程,本应该修改代码后…...
Transformer与NLP研究
自2017年Google Brain团队提出以来,Transformer架构已成为自然语言处理(NLP)领域的核心引擎,彻底改变了AI处理序列数据的方式。从BERT、GPT到T5,再到2025年谷歌发布的Titans架构,这一架构不断演进,突破了传统循环神经网络(RNN)和卷积神经网络(CNN)在并行计算、长距离…...

Grafana 表格自定义下载样式。
我这边的方案是通过 grafana嵌套在iframe中,然后获取数据postmessage 给父页面 调用 excel.js 下载。增加一个html panel , 在 onlint 添加如下代码。该代码会在目标panel的标题上 增加一个 按钮,点击后触发。var targetPanelId 8;setTimeout(function(…...