雷达标定与解析
融合雷达与解析雷达数据的相关代码。感谢开源社区的贡献。以下代码继承了很多人的工作。
如果是单雷达:
直接进行标定,所以就是接收相关的话题然后发布。
lidar_calibration_params.yaml:
calibration:在这个接口里面x_offset: 0.0y_offset: 0.0z_offset: 0.4roll_offset: -0.074pitch_offset: 0yaw_offset: -1.57input_topic: "/lslidar_point_cloud"
output_topic: "/fusion_points"
lidar_calibration_node.cpp
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
#include <tf2/LinearMath/Quaternion.h>
#include <tf2/LinearMath/Matrix3x3.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl_ros/transforms.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <Eigen/Geometry>
#include <iostream>// 标定参数结构体
struct CalibrationParams
{double x_offset;double y_offset;double z_offset;double roll_offset;double pitch_offset;double yaw_offset;
};ros::Publisher calibrated_pub;
CalibrationParams calibration_params;void loadCalibrationParams(const ros::NodeHandle& nh)
{nh.getParam("calibration/x_offset", calibration_params.x_offset);nh.getParam("calibration/y_offset", calibration_params.y_offset);nh.getParam("calibration/z_offset", calibration_params.z_offset);nh.getParam("calibration/roll_offset", calibration_params.roll_offset);nh.getParam("calibration/pitch_offset", calibration_params.pitch_offset);nh.getParam("calibration/yaw_offset", calibration_params.yaw_offset);// 打印加载的参数以确认ROS_INFO("Loaded calibration parameters:");ROS_INFO("x_offset: %f", calibration_params.x_offset);ROS_INFO("y_offset: %f", calibration_params.y_offset);ROS_INFO("z_offset: %f", calibration_params.z_offset);ROS_INFO("roll_offset: %f", calibration_params.roll_offset);ROS_INFO("pitch_offset: %f", calibration_params.pitch_offset);ROS_INFO("yaw_offset: %f", calibration_params.yaw_offset);
}void laserCallback(const sensor_msgs::PointCloud2ConstPtr& cloud_msg)
{// Create transformation matrixEigen::Affine3f transform = Eigen::Affine3f::Identity();transform.translation() << calibration_params.x_offset, calibration_params.y_offset, calibration_params.z_offset;Eigen::AngleAxisf rollAngle(calibration_params.roll_offset, Eigen::Vector3f::UnitX());Eigen::AngleAxisf pitchAngle(calibration_params.pitch_offset, Eigen::Vector3f::UnitY());Eigen::AngleAxisf yawAngle(calibration_params.yaw_offset, Eigen::Vector3f::UnitZ());transform.rotate(yawAngle * pitchAngle * rollAngle);// 打印转换矩阵以确认std::cout << "Transformation Matrix:" << std::endl;std::cout << transform.matrix() << std::endl;// Transform the point cloudsensor_msgs::PointCloud2 calibrated_cloud_msg;pcl_ros::transformPointCloud(transform.matrix(), *cloud_msg, calibrated_cloud_msg);// Publish the calibrated point cloudcalibrated_cloud_msg.header = cloud_msg->header;calibrated_pub.publish(calibrated_cloud_msg);
}int main(int argc, char** argv)
{ros::init(argc, argv, "lidar_calibration_node");ros::NodeHandle nh;// 获取参数服务器中的参数std::string input_topic;std::string output_topic;int queue_size;nh.param<std::string>("input_topic", input_topic, "/lslidar_point_cloud");nh.param<std::string>("output_topic", output_topic, "/calibrated_point_cloud");nh.param<int>("queue_size", queue_size, 10);// 加载标定参数loadCalibrationParams(nh);// std::cout<<input_topic<<std::endl;// std::cout<<output_topic<<std::endl;// 订阅输入点云话题ros::Subscriber laser_sub = nh.subscribe(input_topic, queue_size, laserCallback);// 发布标定后的点云话题calibrated_pub = nh.advertise<sensor_msgs::PointCloud2>(output_topic, queue_size);ros::spin();return 0;
}
启动launch:
<launch><rosparam file="$(find lidar_calibration)/config/lidar_calibration_params.yaml" command="load"/><node pkg="lidar_calibration" type="lidar_calibration_node" name="lidar_calibration_node" output="screen"></node></launch>
以上是单个雷达的标定的,接下来是融合点云的数据标定:
来源于一个开源项目:git clone https://github.com/Hliu0313/fusion_pointclouds
也是直接修改接口就行了:
#参数加载对应 loadparams.h/loadparams.cpp,若修改params.yaml对应修改加载函数即可
fusion_lidar_num: 3 #融合 lidar 点云数量 2/3/4
topics: #订阅 lidar 点云话题
# parent_pc_topic: "/livox/lidar"
# child_pc_topic1: "/right/rslidar_points"
# child_pc_topic2: "/left/rslidar_points"
# child_pc_topic3: "/livox/lidar"parent_pc_topic: "/livox/lidar"child_pc_topic1: "/right/rslidar_points"child_pc_topic2: "/left/rslidar_points"child_pc_topic3: "/livox/lidar"fusion_pc_topic: "/fusion_points" #融合后发布点云话题名称fusion_pc_frame_id: "rslidar" #融合后发布点云话题名称#注意
#1.点云话题少于4个时,为了时间同步回调函数适应不同数量雷达,空位child_pc_topic可以填入parent_pc_topic
#例如 需要融合"/front/rslidar_points" 与"/left/rslidar_points"点云数据
#
#fusion_lidar_num: 2
#parent_pc_topic: "/front/rslidar_points"
#child_pc_topic1: "/left/rslidar_points"
#child_pc_topic2: "/front/rslidar_points" "
#child_pc_topic3: "/front/rslidar_points" #----> 如果只是融合点云数据,下方参数填 false 即可 <-------
set_params_tf: true #是否对点云进行坐标变换
set_params_internal_bounds: true #是否对点云内边界 XYZ 滤除
set_params_external_bounds: true #是否对点外内边界 XYZ 滤除
set_dynamic_params: true #是否开启动态调整,配合 rqt_reconfigure 动态调整坐标变化参数 ---> 解决标定参数不准确,实时微调# cpc1_to_ppc: #child_pc1_to_parent_pc,坐标变化信息传入节点,按需填写即可
# x: -0.75
# y: -0.8
# z: 0.58
# roll: 0.05
# pitch: 0.01
# yaw: 0.06
# cpc2_to_ppc:
# x: -0.75
# y: 0.72
# z: 0.58
# roll: 0.0
# pitch: 0.0
# yaw: -0.1
# cpc3_to_ppc:
# x: 0.0
# y: 0.0
# z: 0.0
# roll: 0.0
# pitch: 0.0
# yaw: 0.0cpc1_to_ppc: #child_pc1_to_parent_pc,坐标变化信息传入节点,按需填写即可x: -0.8y: -0.5z: 1.06roll: 0.04pitch: 0.0yaw: 0.0cpc2_to_ppc:x: -0.75y: 0.75z: 1.06roll: -0.018pitch: 0.018yaw: -0.168# cpc2_to_ppc:
# x: -0.
# y: 0.
# z: 0.0
# roll: -0.0
# pitch: -0.0
# yaw: -0.0cpc3_to_ppc:x: 0.0y: 0.0z: 0.0roll: 0.0pitch: 0.0yaw: 0# Dynamic rqt_reconfigure default bounds
internal_bounds : #内边界x_min: 0.0x_max: 0.0y_min: 0.0y_max: 0.0z_min: 0.0z_max: 0.0external_bounds : #外边界x_min: -100x_max: 100y_min: -100y_max: 100z_min: -5z_max: 5
最后是聚类,也是来源于一个开源项目:
https://blog.csdn.net/weixin_42905141/article/details/122977315?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522171888729016777224495812%2522%252C%2522scm%2522%253A%252220140713.130102334…%2522%257D&request_id=171888729016777224495812&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduend~default-1-122977315-null-null.142v100control&utm_term=%E4%B8%9A%E4%BD%99%E5%86%99%E7%9A%84%E4%B8%80%E4%B8%AA%E7%B2%97%E7%89%88demo%EF%BC%8C%E6%9C%89%E5%BE%88%E5%A4%9A%E5%9C%B0%E6%96%B9%E6%98%AF%E5%8F%AF%E4%BB%A5%E6%94%B9%E8%BF%9B%E7%9A%84%EF%BC%8C%E5%A4%A7%E5%AE%B6%E8%87%AA%E8%A1%8C%E4%BF%AE%E6%94%B9%E5%90%A7&spm=1018.2226.3001.4187
非常感谢他的工作,接下来要做的就是把障碍物的信息用我们需要的方式重新就行发布就行了。我这里直接借鉴一下之前的比赛所遇到的障碍物的接口,我很喜欢他的这一系列的定义。
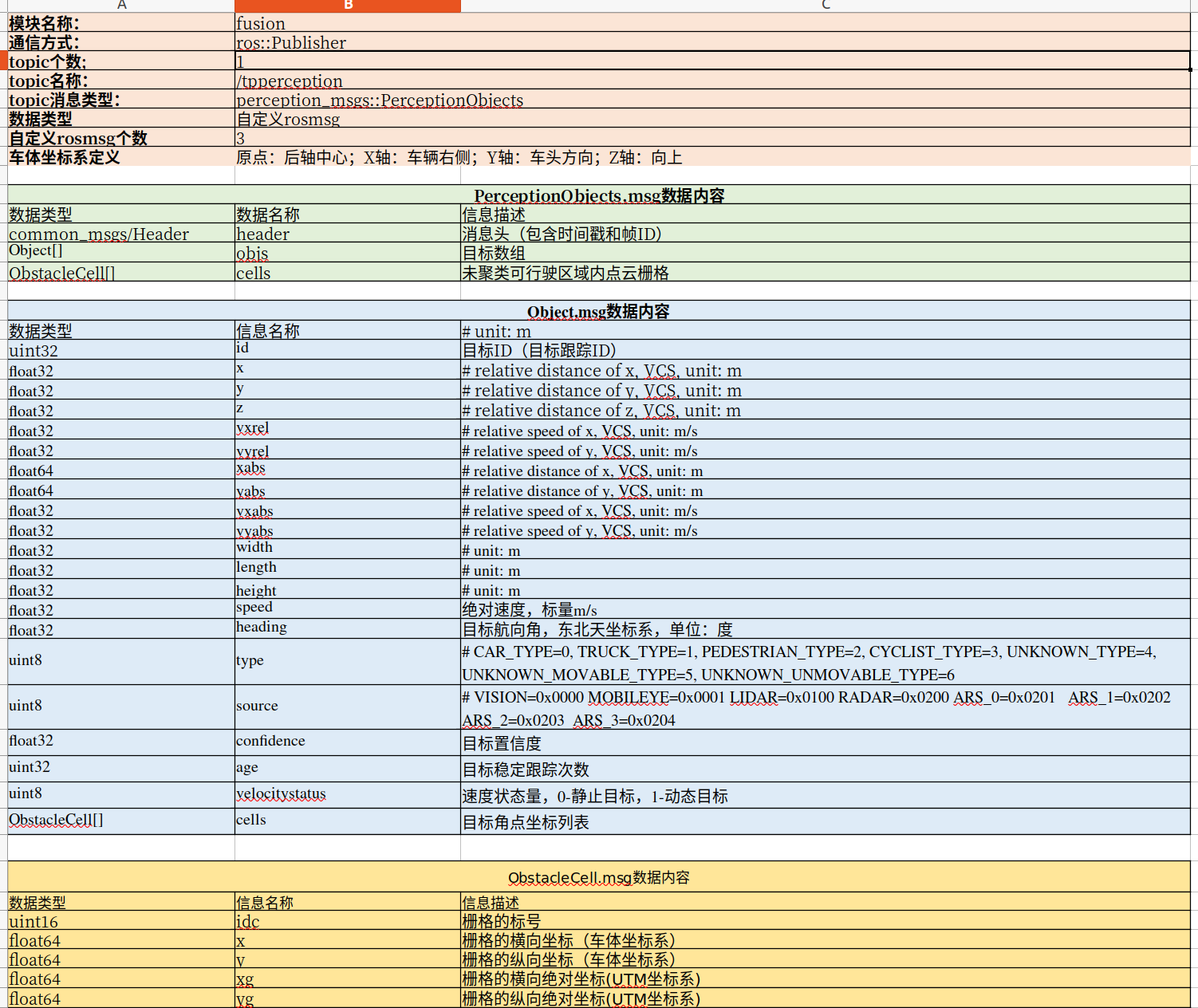
在这个接口里面主要是用上述msg来定义雷达给出的数据。
上述单雷达标定,多雷达融合,以及雷达的聚类都放到这里面了:
https://github.com/chan-yuu/lidar_ws
后续会继续做雷达处理的相关的工作
相关文章:
雷达标定与解析
融合雷达与解析雷达数据的相关代码。感谢开源社区的贡献。以下代码继承了很多人的工作。 如果是单雷达: 直接进行标定,所以就是接收相关的话题然后发布。 lidar_calibration_params.yaml: calibration:在这个接口里面x_offset: 0.0y_offset:…...

养殖自动化温控系统:现代养殖场的智能守护神
现代农业养殖业中,养殖自动化温控系统已经成为提高生产效率和保障动物福利的关键技术之一。本篇文章将深入介绍养殖自动化温控系统的原理、组成、优势及其在不同类型养殖场中的应用实例,并展望该技术的未来发展。 一、养殖自动化温控系统概述 养殖自动…...

用python打印——九九乘法表2
for i in range(1, 10):for j in range(1, i 1):print(f"{j} * {i} {j * i}\t", end)j 1print()外层的 for 循环从 1 到 9 遍历 i。对于每个 i,内层的 for 循环从 1 到 i 遍历 j。在每次循环中,打印出 j 乘以 i 的结果,并以制表…...

如何系统学习机器学习?
我不是计算机专业,第一次接触机器学习还是在研一的时候,当时是看到机器学习可以做号码识别,就觉得好厉害,想学这个。 首次了解到Python这门语言,知道了机器学习可以做什么后,就感觉打开了新世界一样。再后来…...

Qt:1.杂谈
1.前端开发和Qt: 前端开发可以分为网页开发、移动端开发、桌面应用开发。Qt这个技术,是来开发电脑桌面应用程序的,也就是客户端程序的开发。属于比较经典的前端开发体系下。客户端开发的任务:编写和用户交互的界面或者应用程序。大…...

AI视频模型Sora核心功能以及应用场景
随着人工智能技术的飞速发展,AI在视频处理和生成领域的应用正变得越来越广泛。Sora,作为新一代AI视频模型,展示了前所未有的潜力和创新能力。本文将深入探讨Sora的功能、应用场景以及它所带来的革命性变化。 一、Sora的核心功能 1.1 视频生…...
面试-细聊synchronized
1.线程安全问题的主要诱因: 存在多条共享数据(临界资源) 存在多条线程共同操作这些共享数据 解决问题的根本方法: 同一时刻有且仅有一个线程在操作共享数据,其他线程必须等到该线程处理完数据后在对共享数据进行操作。 2.synchroized锁 分…...

AI降重新突破:chatgpt降重工具在学术论文中的应用与效果
论文降重一直是困扰各界毕业生的“拦路虎”,还不容易熬过修改的苦,又要迎来降重的痛。 其实想要给论文降重达标,我有一些独家秘诀。话不多说直接上干货! 1、同义词改写(针对整段整句重复) 这是最靠谱也是…...
Spring学习02-[Spring容器核心技术IOC学习]
Spring容器核心技术IOC学习 什么是bean?如何配置bean?Component方式bean配合配置类的方式import导入方式 什么是bean? 被Spring管理的对象就是bean,和普通对象的区别就是里面bean对象里面的属性也被注入了。 如何配置bean? Component方式、bean配合配置类的方式、import…...
2024上海CDIE 参展预告 | 一站式云原生数字化平台已成趋势
为什么企业需要进行数字化转型?大家都在讨论的数字化转型面临哪些困境?2024.6.25-26 CDIE数字化创新博览会现场,展位【A18】,期待与您相遇,共同探讨企业如何利用数字化技术驱动业务增长。 一、展会介绍——CDIE数字化…...

高考专业组 07组 08组 武汉大学
武汉大学的招生都什么废物点心,搜个专业组都没官方解释! 07组:理学,详见下表专业代码07xxxx,例如数学、物理、化学 08组:工学,详见下表专业代码08xxxx,例如机械、电子信息、自动化、…...

解析JavaScript中逻辑运算符和||的返回值机制
本文主要内容:了解逻辑运算符 &&(逻辑与)和 ||(逻辑或)的返回值。 在JavaScript中,逻辑运算符 &&(逻辑与)和 ||(逻辑或)的返回值可能并不总…...

Java中的数据结构与算法探秘
Java中的数据结构与算法探秘 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿! 引言 数据结构与算法是计算机科学的基础,对于Java程序员来说&#x…...

AST反混淆实战|嵌套的赋值语句通用还原处理
关注它,不迷路。 本文章中所有内容仅供学习交流,不可用于任何商业用途和非法用途,否则后果自负,如有侵权,请联系作者立即删除! 1.混淆代码 下面的这段代码是来自px3验证码核心混淆代码: function _u…...
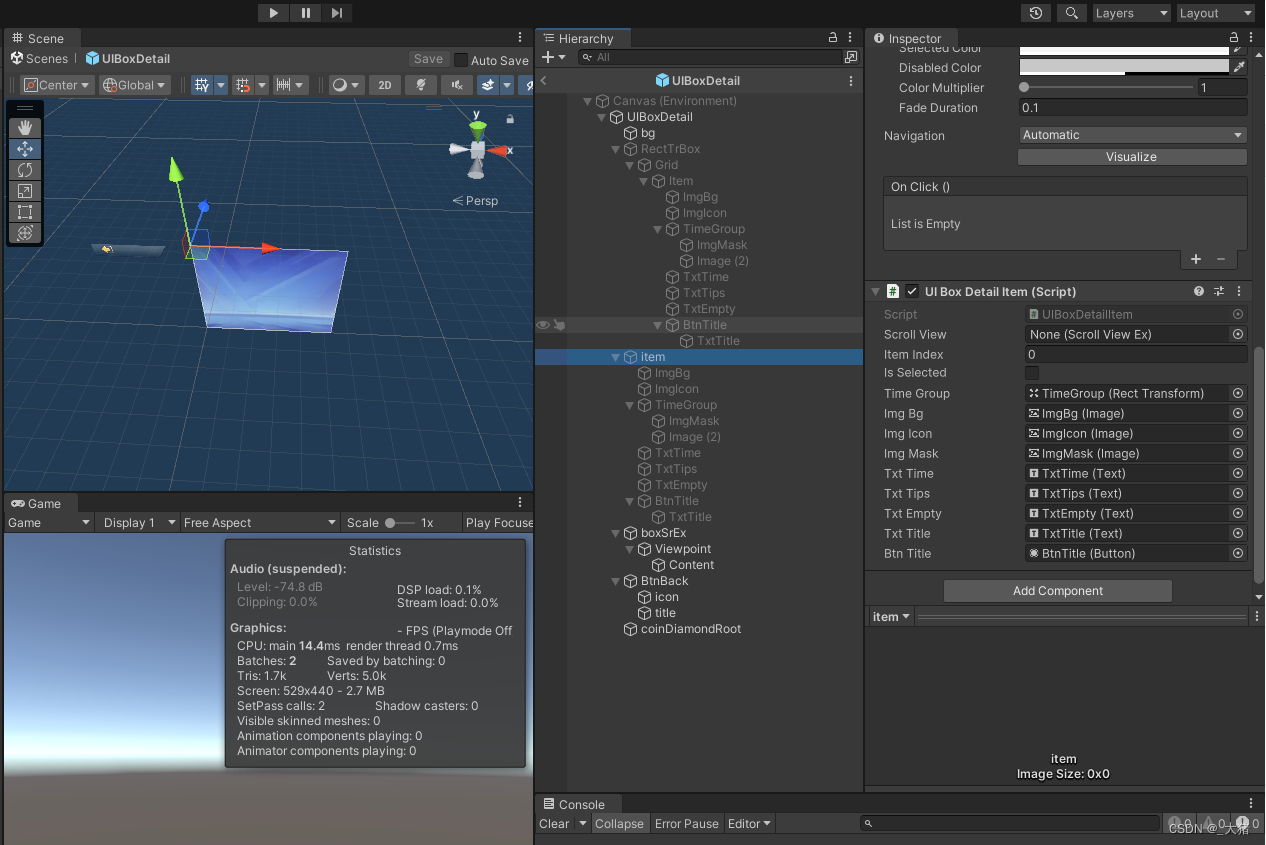
Unity的ScrollView滚动视图复用
发现问题 在游戏开发中有一个常见的需求,就是需要在屏幕显示多个(多达上百)显示item,然后用户用手指滚动视图可以选择需要查看的item。 现在的情况是在100个data的时候,Unity引擎是直接创建出对应的100个显示item。 …...

详解Spring AOP(二)
目录 1.切点表达式 1.1execution表达式 1.2 annotation 1.2.1自定义注解MyAspect 1.2.3添加自定义注解 2.Sping AOP原理 2.1代理模式 2.1.1静态代理 2.1.2动态代理 2.1.3JDK动态代理 2.1.4CGLIB动态代理 3.总结 承接上文:详解Spring AOP(一&…...

sql-analysis
文章目录 痛点: 1、无法提前发现慢sql,可能恶化为慢sql的语句 2、线上出现慢sql后,无法快速止损 后果:一般是以响应时间来发现慢sql,这时候已经对业务产生了一定影响,这时候就要改代码重新发布上线或者改数…...
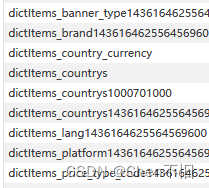
后台管理台字典localStorage缓存删除
localStorage里存放了如以下dictItems_开头的字典数据,localStorage缓存是没有过期时间的,需要手动删除。同时localStorage里还存有其他不需要删除的数据。 这里的方案是遍历localStorage,利用正则和所有key进行匹配,匹配到dict…...
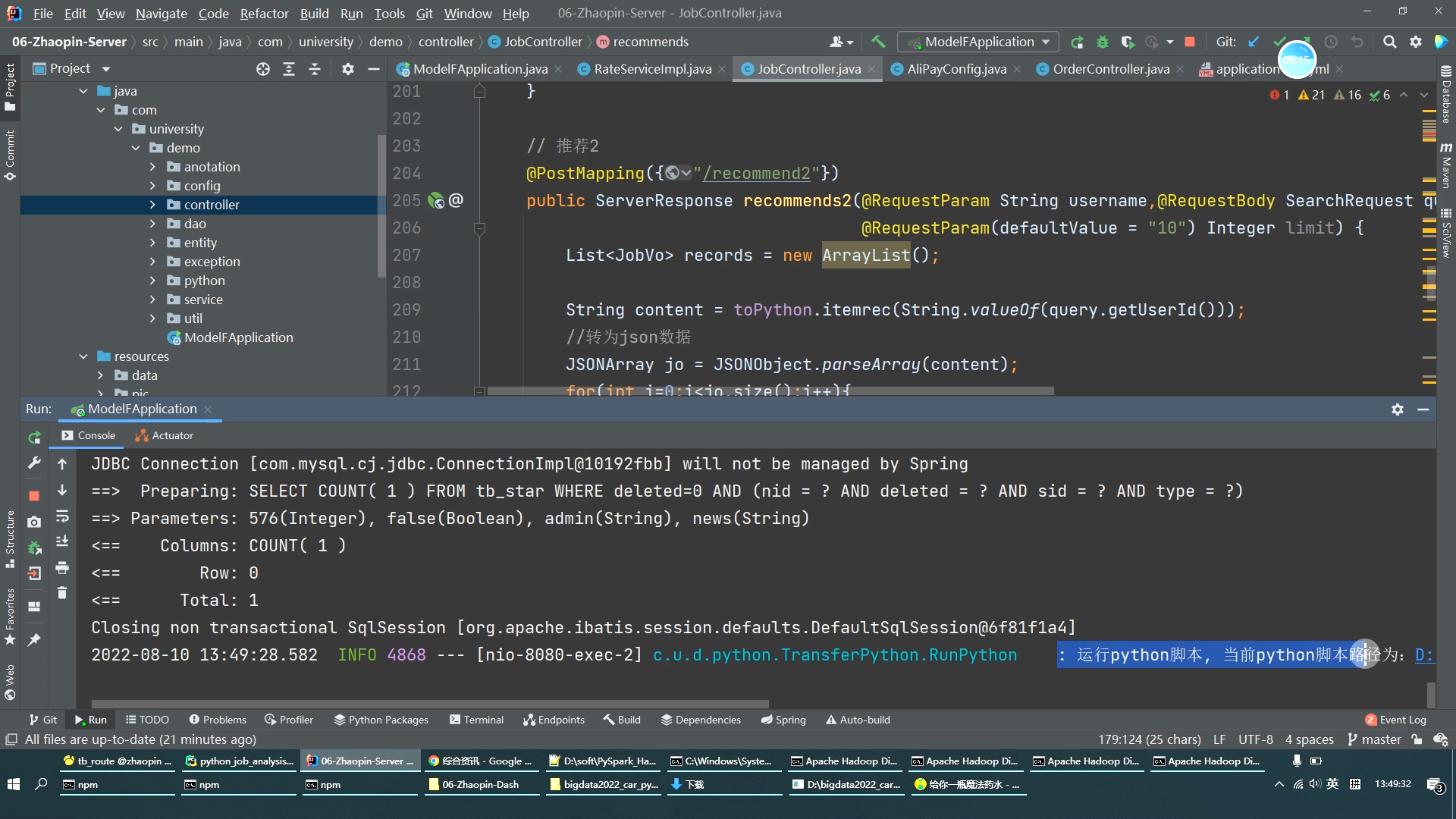
计算机毕业设计PySpark+Hadoop招聘推荐系统 招聘大数据 招聘数据分析 招聘可视化 大数据毕业设计 大数据毕设
1. 管理端: 带有职位的增删改查功能,评论功能是针对新闻模块的,类似新闻大数据的实现 2. 网站端: python / java 协同过滤推荐算法 / 下载职位数据表收费1元每条 / 账户充值 / 短信验证码修改密码 / 身份证识别 / 多条件搜索 3.…...

.Net预定义的泛型委托
我们每次要使用一个委托前,都需要自定义这个委托类型,声明其参数和返回值,然后才能实例化委托类型的对象、最后调用委托对象。 为了简化这个过程,.Net预定义了Func<T>委托、Action<T>委托类型和Predicate<T>&a…...
)
从3D打印机到机械臂:聊聊步进电机选型时,那些容易被忽略的‘动态指标’(附避坑清单)
从3D打印机到机械臂:步进电机选型中那些被低估的动态性能指标 在自动化设备和精密运动控制领域,步进电机因其开环控制特性、高性价比和易于集成的特点,成为3D打印机、CNC机床、机械臂等设备的首选驱动元件。然而,许多工程师在选型…...
)
别再怕模型不准了!用MATLAB的musyn命令搞定鲁棒控制器设计(附D-K迭代详解)
用MATLAB的musyn命令实现工业级鲁棒控制器设计实战指南 在控制系统的实际工程应用中,模型不确定性就像房间里的大象——人人都知道存在,却常常选择忽视。直到某天,精心设计的控制器在真实环境中表现失常,工程师们才意识到那些被忽…...

EPUBCheck测试框架深度解析:单元测试和集成测试最佳实践
EPUBCheck测试框架深度解析:单元测试和集成测试最佳实践 【免费下载链接】epubcheck The conformance checker for EPUB publications 项目地址: https://gitcode.com/gh_mirrors/ep/epubcheck EPUBCheck作为EPUB出版物的官方一致性检查工具,其强…...

高端工程场景实测:OpenAI Codex CLI 在微服务重构中的 3 类能力边界
1. 微服务重构现场:Codex CLI 不是万能胶,但能精准补上三块关键拼图 我接手一个运行了四年的电商微服务集群时,它正卡在「订单履约链路」的重构临界点上。17个服务、32个跨服务调用点、4种异步消息协议、2套数据库分片策略——人工梳理接口契约要两周,写迁移脚本要三天,验…...

别再只会抄电路图了!深入拆解LM317数据手册,搞懂可调稳压电源每个电阻电容的作用
从数据手册到实战设计:LM317可调稳压电源的深度解析 在电子设计领域,能够读懂并应用集成电路数据手册是区分初级玩家和专业工程师的重要标志。LM317作为经典的线性稳压器,其数据手册中蕴含的设计智慧远比大多数教科书上的标准电路图丰富得多。…...

【亲测免费】 Zebra打印机中文转ZPL指令的.NET实现
Zebra打印机中文转ZPL指令的.NET实现 【下载地址】Zebra打印机中文转ZPL指令的.NET实现 本项目提供了一个用于将中文文本转换为ZPL指令的.NET实现,旨在替代Zebra官方提供的非托管组件FNTHEX32.DLL。该组件在托管环境下需要额外的封装,并且缺乏64位程序的…...

Mac视频预览终极指南:QuickLookVideo让你的Finder焕然一新
Mac视频预览终极指南:QuickLookVideo让你的Finder焕然一新 【免费下载链接】QuickLookVideo This package allows macOS Finder to display thumbnails, static QuickLook previews, cover art and metadata for most types of video files. 项目地址: https://gi…...

从Vue源码的preinstall钩子看团队包管理器规范:npx only-allow pnpm的工程实践
1. 为什么需要统一包管理器 最近在查看Vue源码时,发现package.json里有个有趣的配置:"preinstall": "npx only-allow pnpm"。这行看似简单的命令,背后隐藏着团队协作中一个非常重要的问题——包管理器的统一性。 想象一下…...

专业级LaTeX排版:深度解析中国科学技术大学学位论文模板括号使用的最佳实践
专业级LaTeX排版:深度解析中国科学技术大学学位论文模板括号使用的最佳实践 【免费下载链接】ustcthesis LaTeX template for USTC thesis 项目地址: https://gitcode.com/gh_mirrors/us/ustcthesis 在学术论文写作中,细节决定专业水准。中国科学…...

如何扛住十万级流量洪峰?扒开高并发架构的五层防御体系
在互联网的残酷战场上,流量既是黄金,也是洪水。试想这样一个场景:你们公司花重金请了一位顶流代言人,晚上 8 点准时开启一场“一元秒杀”活动。时间一到,原本平时只有几百 QPS(每秒请求数)的系统…...