OpenCV练习(2)图像校正
- 1、傅里叶变换 + 霍夫变换+ 直线 + 角度 + 旋转
- 2、边缘检测 + 霍夫变换 + 直线+角度 + 旋转
- 3、四点透视 + 角度 + 旋转
- 4、检测矩形轮廓 + 角度 + 旋转
1.目的
实现类似全能扫面王的图像校正功能
2. 基于轮廓提取和透射变换
基于轮廓提取和透射变换的矫正算法更适用于车牌、身份证、人民币、书本、 发票一类矩形形状而且边界明显的物体矫正。所校正的内容必须要有清晰的完整轮廓。
基本步骤:
- 图片灰度化
- 二值化/canny边缘检测等操作
- 检测轮廓,并筛选出目标轮廓(通过横纵比或面积去除干扰轮廓)
- 获取图像顶点
- 透视变换
代码:
import cv2
import numpy as npdef contour_to_rect(contour):pts = contour.reshape(4, 2)print(pts)rect = np.zeros((4, 2), dtype = "float32")# top-left point has the smallest sum# bottom-right has the largest sums = pts.sum(axis = 1)
# print(s)rect[0] = pts[np.argmin(s)]
# print(pts[np.argmin(s)])rect[2] = pts[np.argmax(s)]# compute the difference between the points:# the top-right will have the minumum difference# the bottom-left will have the maximum differencediff = np.diff(pts, axis = 1)rect[1] = pts[np.argmin(diff)]rect[3] = pts[np.argmax(diff)]return rect# approximate the contour by a more primitive polygon shape
def approximate_contour(contour):peri = cv2.arcLength(contour, True)return cv2.approxPolyDP(contour, 0.032 * peri, True)# 获取顶点坐标
def get_receipt_contour(contours):# loop over the contoursfor c in contours:approx = approximate_contour(c)# if our approximated contour has four points, we can assume it is receipt's rectangleif len(approx) == 4:return approxdef wrap_perspective(img, rect):# unpack rectangle points: top left, top right, bottom right, bottom left(tl, tr, br, bl) = rect# compute the width of the new imagewidthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))# compute the height of the new imageheightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))# take the maximum of the width and height values to reach# our final dimensionsmaxWidth = max(int(widthA), int(widthB))maxHeight = max(int(heightA), int(heightB))# destination points which will be used to map the screen to a "scanned" viewdst = np.array([[0, 0],[maxWidth - 1, 0],[maxWidth - 1, maxHeight - 1],[0, maxHeight - 1]], dtype = "float32")# calculate the perspective transform matrixM = cv2.getPerspectiveTransform(rect, dst)# warp the perspective to grab the screenreturn cv2.warpPerspective(img, M, (maxWidth, maxHeight))if __name__ == "__main__":img = cv2.imread("./images/1.png")gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 用高斯滤波处理原图像降噪blur = cv2.GaussianBlur(gray, (5, 5), 0)#canny边缘检测(仅针对这次的输入图片)edged = cv2.Canny(blur, 50, 150)contours, h = cv2.findContours(edged.copy(), mode=cv2.RETR_EXTERNAL, method=cv2.CHAIN_APPROX_SIMPLE)# img_contours = cv2.drawContours(img.copy(), contours, -1, (0, 0, 255), 3)largest_contours = sorted(contours, key=cv2.contourArea, reverse=True)[:5]# img_largest_contours = cv2.drawContours( img.copy(), largest_contours, -1, (0, 0, 255), 3)receipt_contour = get_receipt_contour(largest_contours)# img_receipt_contour = cv2.drawContours(img.copy(), [receipt_contour], -1, (0, 0, 255), 3)ori_img = img.copy()for coor in contour_to_rect(receipt_contour):cv2.circle(ori_img, (int(coor[0]), int(coor[1])), 1, (0, 0, 255), 4)# 进行透视变换scanned = wrap_perspective(img.copy(), contour_to_rect(receipt_contour))
2.1 图像灰度化
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5, 5), 0)(如果有噪声可以加个高斯滤波)
2.2 canny边缘检测
edged = cv2.Canny(blur, 50, 150) (三个参数分别输入图像,最小阈值,最大阈值)
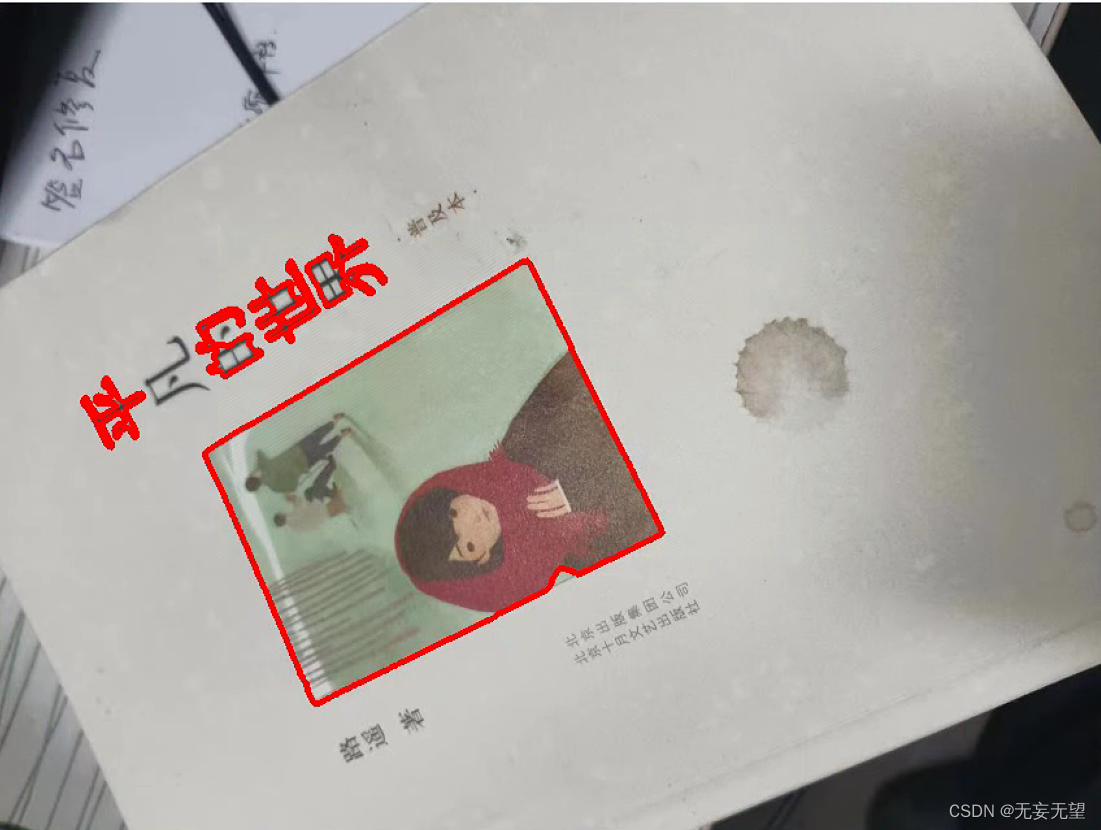
下图中左为输出,右为边缘检测结果。看起来效果还行


左为所有轮廓绘制,右为面积前五的绘制。可以看到,书中长方形的框并不在检测中,这是因为在进行边缘检测时色差不大导致没检测出来,后续使用闭运算处理将连断出填充完。
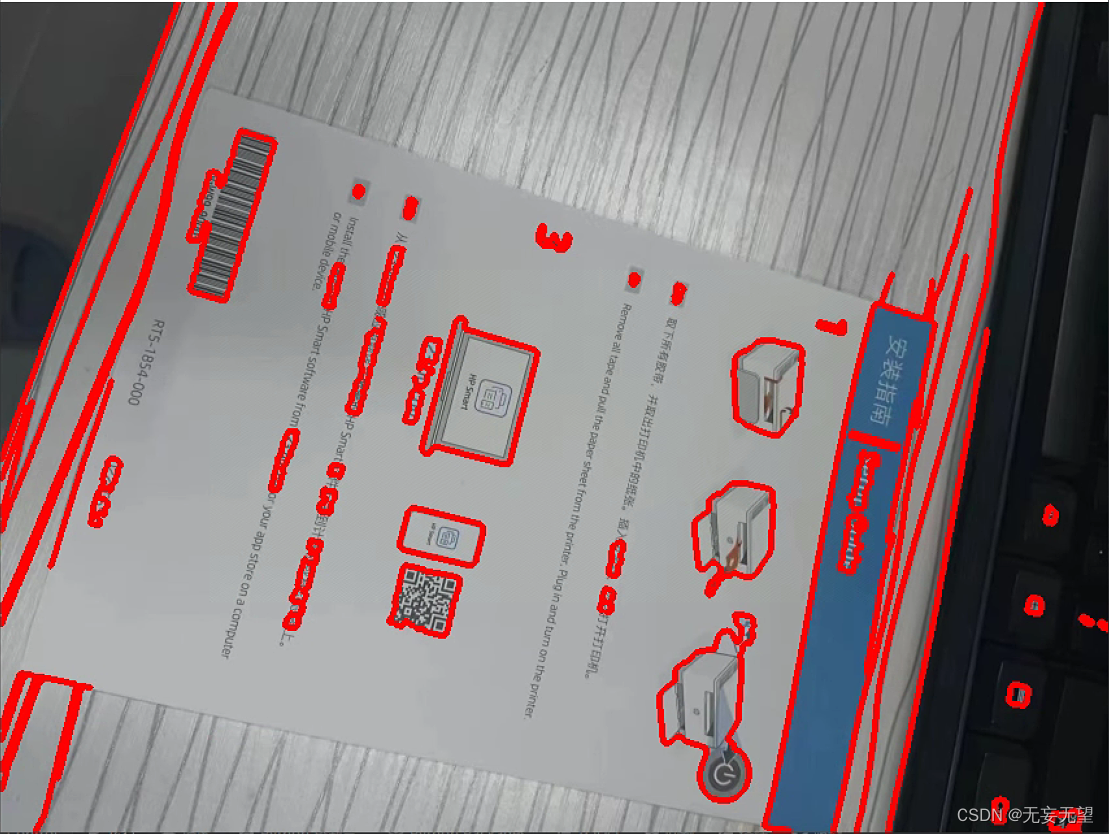
但是对于,图像边框,或者说前景与背景色差不大时,很难检测出来,如下图放在白色桌面的安装指南
2.3 检测轮廓,并筛选出目标轮廓(通过横纵比或面积去除干扰轮廓)
contours, h = cv2.findContours(edged.copy(), mode=cv2.RETR_EXTERNAL, method=cv2.CHAIN_APPROX_SIMPLE)
img_contours = cv2.drawContours(img.copy(), contours, -1, (0, 0, 255), 3)
检测图像轮廓并绘制所有的轮廓
# approximate the contour by a more primitive polygon shape
def approximate_contour(contour):
peri = cv2.arcLength(contour, True)
return cv2.approxPolyDP(contour, 0.032 * peri, True)
# 获取顶点坐标
def get_receipt_contour(contours):
# loop over the contours
for c in contours:
approx = approximate_contour(c)
# if our approximated contour has four points, we can assume it is receipt's rectangle
if len(approx) == 4:
return approx
在这个实现中,
approximate_contour函数使用cv2.approxPolyDP来近似轮廓。cv2.approxPolyDP的第二个参数是精度参数,它是一个距离值,表示近似轮廓与原始轮廓之间的最大距离。这个值是原始轮廓周长的百分比,通常设置为一个很小的值(例如0.02)。第三个参数True表示近似出的多边形是闭合的。
get_receipt_contour函数然后使用这个近似函数来寻找一个四边形的轮廓,假设这个四边形是收据的形状。如果找到了一个有四个顶点的轮廓,它就返回这个轮廓。如果没有找到,函数将返回None。请注意,这个函数假设收据是一个四边形,并且是轮廓列表中面积最大的四边形。在实际应用中,可能需要根据收据的具体形状和图像中的其他元素来调整这个函数。
2.4 获取图像顶点
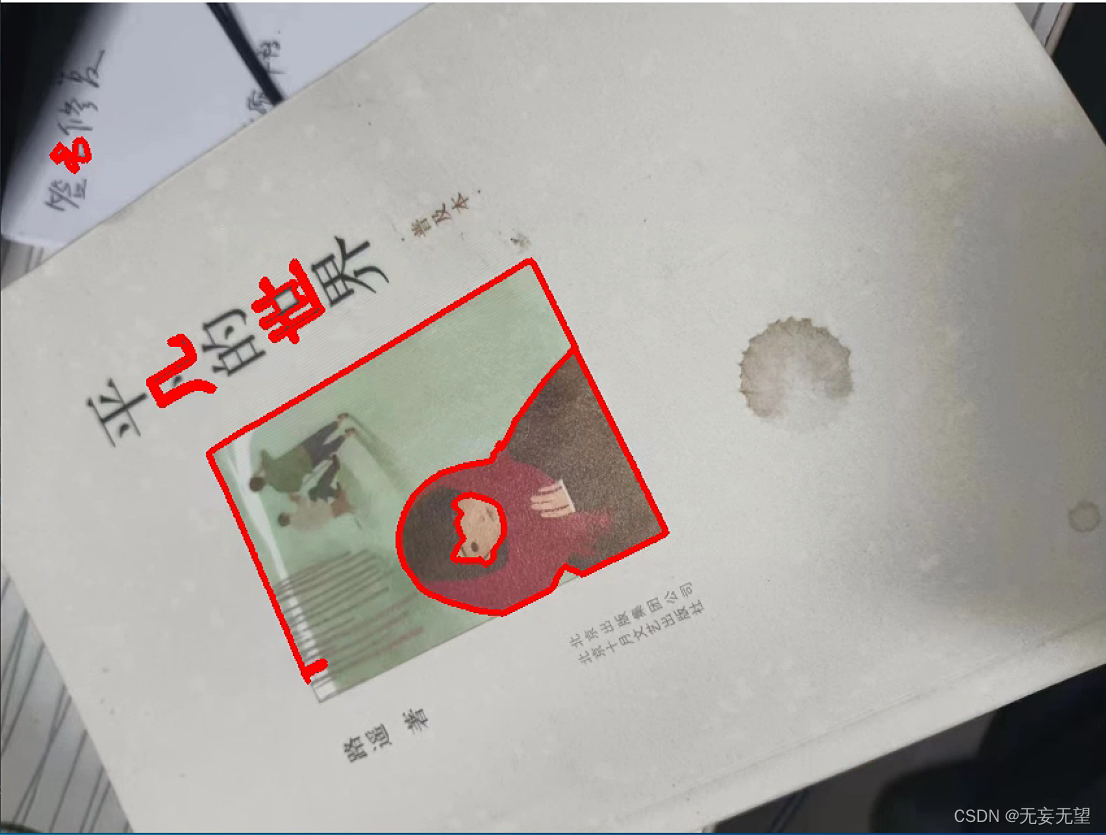
receipt_contour = get_receipt_contour(largest_contours)
img_receipt_contour = cv2.drawContours(img.copy(), [receipt_contour], -1, (0, 0, 255), 3)def contour_to_rect(contour):
pts = contour.reshape(4, 2)
print(pts)
rect = np.zeros((4, 2), dtype = "float32")
# top-left point has the smallest sum
# bottom-right has the largest sum
s = pts.sum(axis = 1)
# print(s)
rect[0] = pts[np.argmin(s)]
# print(pts[np.argmin(s)])
rect[2] = pts[np.argmax(s)]
# compute the difference between the points:
# the top-right will have the minumum difference
# the bottom-left will have the maximum difference
diff = np.diff(pts, axis = 1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect在您提供的
contour_to_rect函数中,目标是将以四个顶点形式给出的轮廓转换为一个矩形,这个矩形以特定的顺序排列顶点,通常是顺时针或逆时针方向,从左上角开始。然而,在您提供的代码中存在一些问题,包括一个拼写错误和一个可能的逻辑错误。我将为您纠正这些问题,并提供一个完整的函数,该函数将返回一个按正确顺序排列顶点的矩形。
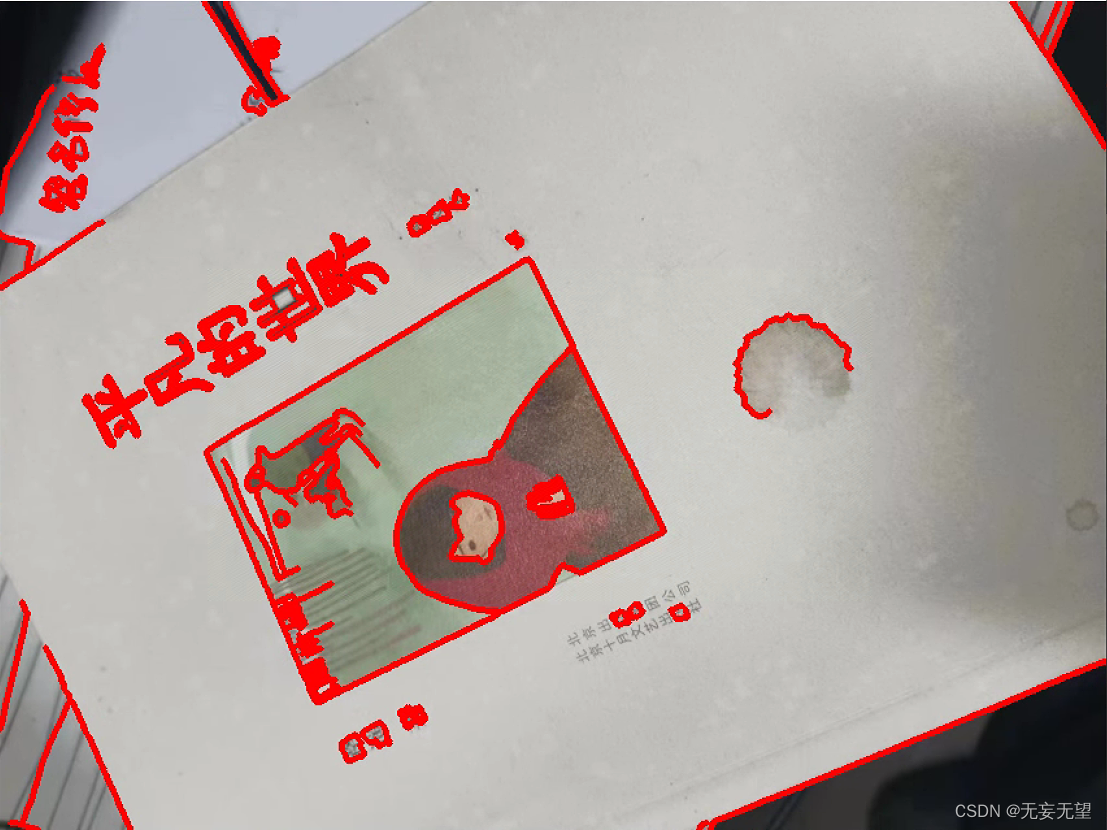
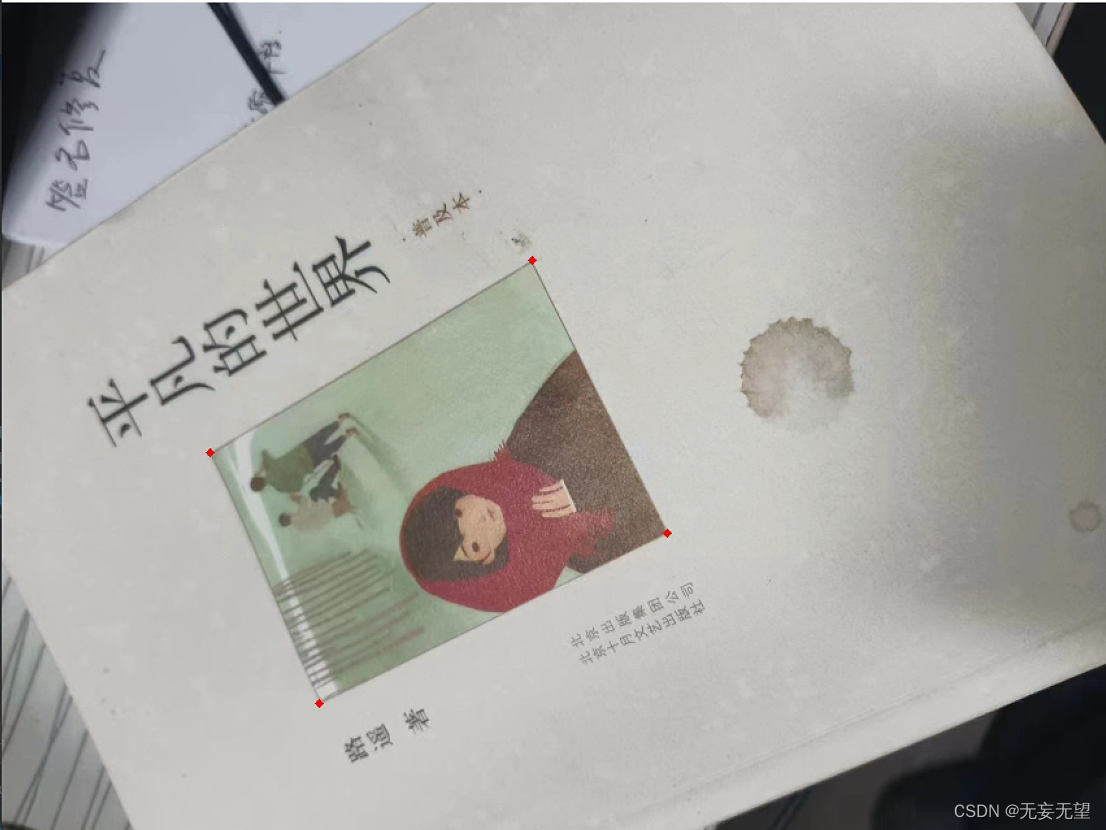
ori_img = img.copy() for coor in contour_to_rect(receipt_contour): cv2.circle(ori_img, (int(coor[0]), int(coor[1])), 1, (0, 0, 255), 4)
将筛选的四个点在图像中标注
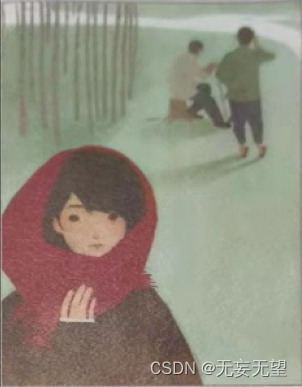
2.5 透视变换
scanned = wrap_perspective(img.copy(), contour_to_rect(receipt_contour))def wrap_perspective(img, rect):# unpack rectangle points: top left, top right, bottom right, bottom left(tl, tr, br, bl) = rect# compute the width of the new imagewidthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))# compute the height of the new imageheightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))# take the maximum of the width and height values to reach# our final dimensionsmaxWidth = max(int(widthA), int(widthB))maxHeight = max(int(heightA), int(heightB))# destination points which will be used to map the screen to a "scanned" viewdst = np.array([[0, 0],[maxWidth - 1, 0],[maxWidth - 1, maxHeight - 1],[0, maxHeight - 1]], dtype = "float32")# calculate the perspective transform matrixM = cv2.getPerspectiveTransform(rect, dst)# warp the perspective to grab the screenreturn cv2.warpPerspective(img, M, (maxWidth, maxHeight))
您提供的
wrap_perspective函数是用于执行透视变换的,这种变换通常用于将图像中的四边形区域(如收据、文档等)转换为俯视图,即“扫描”视图。这个函数接受两个参数:要变换的图像img和一个表示四边形顶点的numpy数组rect。以下是函数中每一步的解释:
解包四边形顶点:将四边形的顶点解包为
tl(左上角)、tr(右上角)、br(右下角)和bl(左下角)。计算新图像的宽度:通过计算对角线
br到bl和tr到tl的距离来得到新图像的潜在宽度。使用欧几里得距离公式sqrt((x2 - x1)^2 + (y2 - y1)^2)。计算新图像的高度:同样,通过计算对角线
tr到br和tl到bl的距离来得到新图像的潜在高度。确定最终尺寸:通过取宽度 和高度的最大值来确保四边形在变换后不会被裁剪。
定义目标点:创建一个目标点数组
dst,这些点定义了变换后的四边形的顶点位置。这些点将图像映射到一个矩形的“扫描”视图。计算透视变换矩阵:使用
cv2.getPerspectiveTransform函数计算从原始四边形到目标矩形的透视变换矩阵M。执行透视变换:使用
cv2.warpPerspective函数应用透视变换到图像img上,得到变换后的图像。
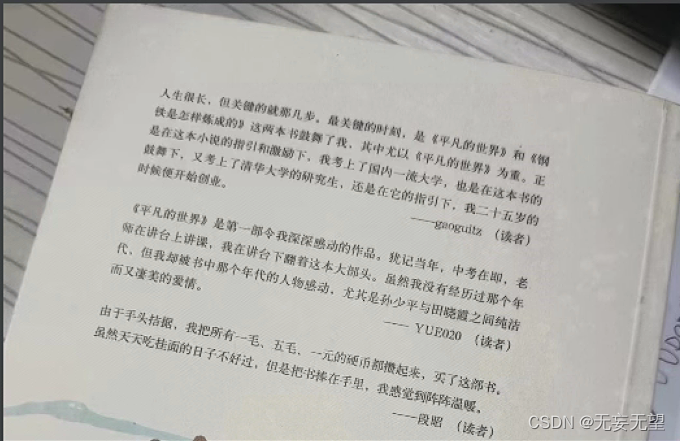
3. 基于霍夫直线探测和仿射变换
基于霍夫直线探测的矫正算法更适用于文本类等无明显边界图像的矫正。图像画面必须要干净
算法步骤
- 用霍夫线变换探测出图像中的所有直线。
- 计算出每条直线的倾斜角,求他们的平均值。
- 根据倾斜角旋转矫正。
- 最后根据文本尺寸裁剪图片。
代码:
import cv2
import numpy as npimg = cv2.imread("./images/4.jpg")
src = img.copy()
gray = cv2.cvtColor(src, cv2.COLOR_RGB2GRAY);
edged = cv2.Canny(src, 50, 200, apertureSize=3);# 第5个参数就是阈值,阈值越大,检测精度越高
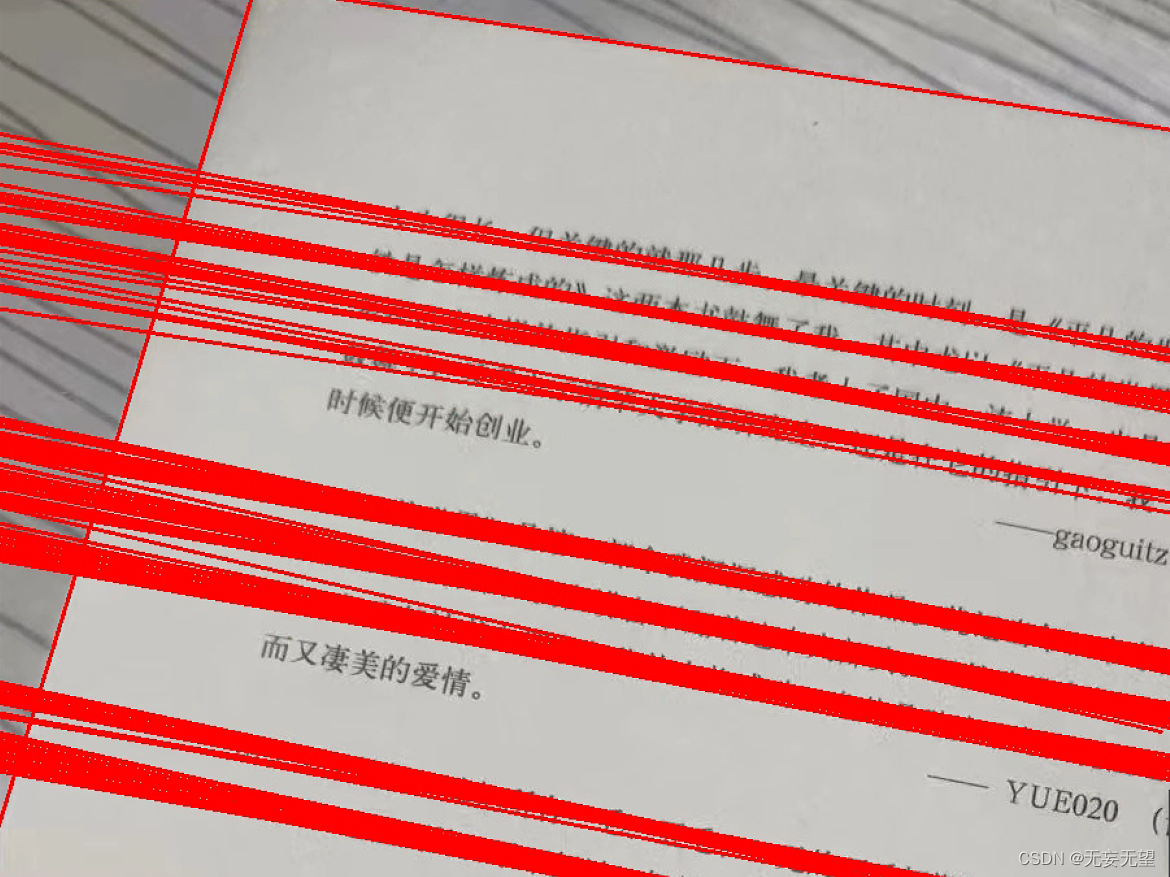
plines = cv2.HoughLines(edged, 1, np.pi / 180, 200);
if plines is not None:plines = plines.reshape(-1, 2)print(len(plines), "lines detected")sum_theta = 0.0for rho, theta in plines:# rho, theta = line[0]a = np.cos(theta)b = np.sin(theta)x0 = a * rhoy0 = b * rhox1 = int(x0 + 1000*(-b))y1 = int(y0 + 1000*(a))x2 = int(x0 - 1000*(-b))y2 = int(y0 - 1000*(a))sum_theta += theta# 绘制直线cv2.line(src, (x1, y1), (x2, y2), (0, 0, 255), 2)# 计算平均角度
average_theta = sum_theta / len(plines)
angle = np.degrees(average_theta) - 90# 计算旋转中心
center = (float(img.shape[1] / 2.0), float(img.shape[0] / 2.0))
# 计算对角线长度作为旋转后图像的尺寸
length = int(np.sqrt(img.shape[0]**2 + img.shape[1]**2))
# 计算旋转矩阵
M = cv2.getRotationMatrix2D(center, angle, 1)
# 进行仿射变换并填充背景色为白色
src_rotate = cv2.warpAffine(img, M, (length, length), borderValue=(255, 255, 255))
3.1 图像预处理
在此不赘述,根据实际情况来
3.2 霍夫线变换
# 第5个参数就是阈值,阈值越大,检测精度越高
plines = cv2.HoughLines(edged, 1, np.pi / 180, 200);在OpenCV中,
cv2.HoughLines函数用于检测图像中的直线。它使用霍夫变换(Hough Transform)来找到图像中直线的参数,然后将这些参数转换为图像中的直线。您提供的代码片段
plines = cv2.HoughLines(edged, 1, np.pi / 180, 200);是使用霍夫变换在经过Canny边缘检测的图像edged中检测直线的例子。这里的参数解释如下:
edged:这是已经通过Canny边缘检测得到的图像。1:这是霍夫变换中使用的rho(极径)参数。它定义了检测直线时的搜索范围。较大的值会使检测到的直线更加稀疏,而较小的值则可能导致检测到的直线更加密集。np.pi / 180:这是霍夫变换中使用的theta(角度)参数。它定义了检测直线时的角度范围。这里使用的是单位圆上的角度,即0到π弧度。200:这是霍夫变换中使用的阈值参数。它定义了直线检测的灵敏度。较大的值会使检测到的直线更加稀疏,而较小的值则可能导致检测到的直线更加密集。
if plines is not None:
plines = plines.reshape(-1, 2)
print(len(plines), "lines detected")在OpenCV中,
cv2.HoughLines函数返回一个包含检测到的直线的数组,如果没有任何直线被检测到,这个数组将为None。这种情况可能发生在以下几种情况下:
图像噪声:如果图像中的噪声非常强烈,可能会导致无法检测到任何直线。
参数设置:
cv2.HoughLines函数的参数设置(如阈值、角度范围等)可能不适合当前图像。如果参数设置不当,可能无法检测到任何直线。图像内容:如果图像中没有明显的直线结构,例如在复杂的自然场景中,可能会检测不到直线。
图像大小:如果图像非常小,可能没有足够的空间来检测直线。
图像分辨率:如果图像的分辨率非常低,可能会导致检测到的直线不够精确。
图像方向:如果图像的方向与霍夫变换的搜索方向不匹配,可能会检测不到直线。
在实际应用中,您可能需要根据图像的具体内容和噪声水平来调整
cv2.HoughLines函数的参数,以提高检测直线的效果。
sum_theta = 0.0
for rho, theta in plines:
# rho, theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
sum_theta += theta
# 绘制直线
cv2.line(src, (x1, y1), (x2, y2), (0, 0, 255), 2)在您提供的代码片段中,您正在遍历通过霍夫变换检测到的直线,并将这些直线绘制在原始图像
src上。每个直线由两个点定义,这两个点是根据极径rho和角度theta计算出来的。代码中的关键步骤如下:
遍历
plines数组,其中每个元素是一个包含两个值rho和theta的元组。rho是直线与原点之间的距离,而theta是从x轴正向到直线方向的角度(以弧度为单位)。对于每个元素,您首先提取
rho和theta值。使用
np.cos(theta)和np.sin(theta)计算直线斜率a和b。使用
a * rho和b * rho计算直线上的两个点的x和y坐标。这些坐标是通过将rho值乘以直线的方向向量(由a和b定义)得到的。使用
int(x0 + 1000*(-b))和int(y0 + 1000*(a))计算第一个点的坐标,其中1000是一个常数,用于确保坐标在图像范围内。使用
int(x0 - 1000*(-b))和int(y0 - 1000*(a))计算第二个点的坐标。使用
cv2.line函数在原始图像src上绘制从第一个点到第二个点的直线,颜色为红色,线宽为2。将角度
theta累加到变量sum_theta中。
经过自己的多次实验,发现霍夫线变换的弧度转化为角度时,是以Y轴正半轴为0°,顺时针计算角度。并且在仿射变换进行旋转时,如果给的是正数,就会逆时针旋转,如果给的是负数,就会顺时针旋转
3.3 旋转角度和旋转中心
# 计算平均角度
average_theta = sum_theta / len(plines)
angle = np.degrees(average_theta) - 90在OpenCV中,
cv2.HoughLines函数返回的角度参数是以弧度为单位的。这个函数使用霍夫变换来检测图像中的直线,而霍夫变换中使用的角度参数是弧度制的。霍夫变换是一种在图像中检测直线的方法,它将图像中的每个点转换为一个参数空间中的一个点,其中参数空间是一个笛卡尔坐标系,x轴和y轴分别对应于图像中的直线的斜率和截距。在霍夫变换中,θ是直线的倾斜角,以弧度为单位。
因此,当您从
cv2.HoughLines函数中获取θ值时,这些值是以弧度为单位的。如果您需要将它们转换为角度,可以使用NumPy的np.degrees函数来进行转换。请注意,弧度与度的转换关系是:
1 弧度=180 /Π 度
# 计算旋转中心
center = (float(img.shape[1] / 2.0), float(img.shape[0] / 2.0))
# 计算对角线长度作为旋转后图像的尺寸
length = int(np.sqrt(img.shape[0]**2 + img.shape[1]**2))
3.4 旋转矩阵
# 计算旋转矩阵
M = cv2.getRotationMatrix2D(center, angle, 1)
3.5 仿射变换
# 进行仿射变换并填充背景色为白色
src_rotate = cv2.warpAffine(img, M, (length, length), borderValue=(255, 255, 255))
4. 基于最小外接矩形和仿射变换
有明显的单一外接矩形的图像,最好是文本。
算法步骤:
- 灰度化以及预处理
- 二值化/边缘检测
- 最小外接矩形
- 旋转中心、旋转角度以及旋转矩阵
- 仿射变换
代码:
import numpy as np
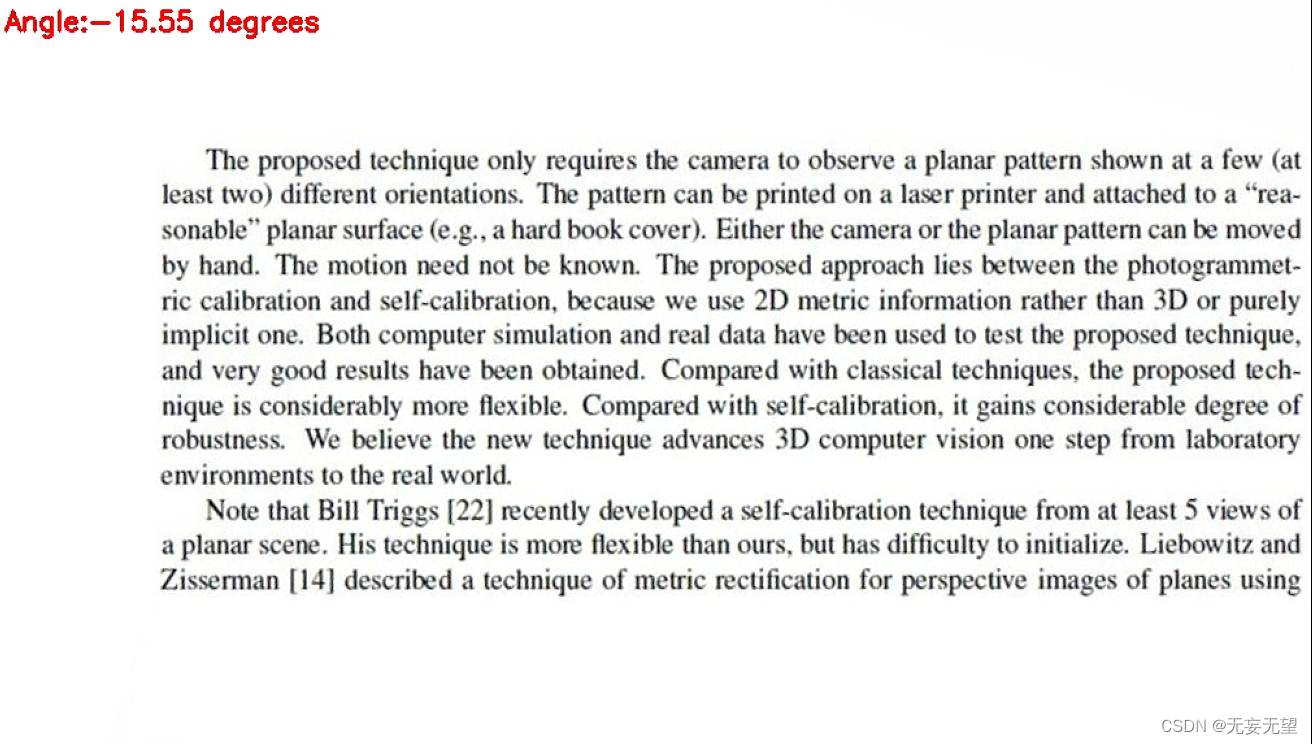
import cv2 as cvdef binary(img):gray=cv.cvtColor(img,cv.COLOR_BGR2GRAY)ret,binary = cv.threshold(gray,0,255,cv.THRESH_BINARY_INV|cv.THRESH_OTSU)return binarydef Transformation(img,src):coords=np.column_stack(np.where(img>0))print(coords)print(coords.shape)angle =cv.minAreaRect(coords)[-1] #最小外接矩形print(angle)if angle<-45:angle = -(90+angle)else:angle=-anglecenter = (w//2,h//2)M= cv.getRotationMatrix2D(center,angle,1.0) #传入中心和角度 得到旋转矩形rotated = cv.warpAffine(src,M,(w,h),flags=cv.INTER_CUBIC,borderMode=cv.BORDER_REPLICATE)cv.putText(rotated,'Angle:{:.2f} degrees'.format(angle),(10,30),cv.FONT_HERSHEY_SIMPLEX,0.7,(0,0,255),2)#绘制文字cv.imshow('Rotated',rotated)src= cv.imread('imageTextR.png')
(h,w)=src.shape[:2]
gray=cv.cvtColor(src,cv.COLOR_BGR2GRAY)
binary=binary(src)
Transformation(binary,src)
cv.imshow('src',src)
cv.imshow('binary',binary)
cv.waitKey(0)4.1 灰度化以及预处理
不多赘述
4.2 二值化
ret,binary = cv.threshold(gray,0,255,cv.THRESH_BINARY_INV|cv.THRESH_OTSU)在OpenCV中,
cv2.threshold函数用于将图像转换为二值图像。您提供的代码片段ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)是使用cv2.threshold函数对灰度图像gray进行阈值处理,以创建一个二值图像binary。这里的参数解释如下:
gray:这是您要进行阈值处理的灰度图像。0:这是阈值处理的下限值。所有小于这个值的像素将被设置为0(通常是黑色)。255:这是阈值处理的上限值。所有大于这个值的像素将被设置为255(通常是白色)。cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU:这是阈值处理的方法。cv2.THRESH_BINARY_INV表示使用二值反转阈值,即小于阈值的像素将被设置为255(白色),大于阈值的像素将被设置为0(黑色)。cv2.THRESH_OTSU表示使用Otsu’s方法来自动选择阈值。Otsu’s方法是一种自动选择阈值的方法,它通过最大化类间方差来选择最佳阈值。这种方法通常用于图像分割,以区分前景和背景。
4.3 最小外接矩形
首先获取所有非零坐标元素
coords=np.column_stack(np.where(binary>0))
在您提供的代码片段中,
coords = np.column_stack(np.where(binary > 0))是一个用于获取二值图像中所有非零像素位置的坐标的方法。具体步骤如下:
创建二值图像:首先,您使用
cv2.threshold函数创建了一个二值图像binary。在这个二值图像中,值为0的像素代表背景,而值为255的像素代表前景。使用
np.where获取非零像素位置:np.where(binary > 0)是一个NumPy函数,用于获取二值图像中所有非零像素的位置。这个函数返回一个包含所有非零像素坐标的元组,其中第一个元素是x坐标,第二个元素是y坐标。将坐标堆叠为列向量:使用
np.column_stack函数将坐标堆叠为列向量。这个操作将创建一个二维数组,其中每一行代表一个像素点的坐标。
然后寻找最小外接矩形
angle =cv.minAreaRect(coords)[-1]
在OpenCV中,
cv2.minAreaRect函数用于找到图像中最小的外接矩形,并返回该矩形的旋转角度。这个函数通常用于对象检测和图像识别任务中。
cv2.minAreaRect函数的参数是一个包含像素点的坐标数组,这些点定义了一个多边形。函数返回的参数有三个:1.矩形的中心点 2.矩形的长和宽 3.矩形的旋转角度在您提供的代码片段中,
angle = cv2.minAreaRect(coords)[-1]的目的是获取最小外接矩形的旋转角度。coords是一个包含像素点的坐标数组,这些点定义了一个多边形,即您之前通过np.column_stack(np.where(binary > 0))获取的非零像素位置。
angle_p =cv.minAreaRect(coords) box_points = cv.boxPoints(angle_p) box_points = np.int0(box_points) cv.circle(src, [146,284], 1, (0, 0, 255), 4) srca = cv.drawContours(src, [box_points], -1, (0, 0, 255), 2) 》》》15.60267448425293可以看到画出的外接矩形不能将文字全部包裹住,其角度为15.6,同样是以y轴正半轴为0°,顺时针为度数。
4.4 中心,角度,矩阵
cv.getRotationMatrix2D(center, angle, scale) → M
| 参数 | 说明 |
|---|---|
| center | 表示旋转中心坐标,二元元组 (x0, y0)。 |
| angle | 表示旋转角度,单位为角度,逆时针为正数,顺时针为负数。 |
| scale | 表示缩放因子。 |
4.5 仿射变换
需要说明的是,不管是霍夫线变换还是最小外接矩形,都是为了获取图像的一个倾斜角度。按上面画出的外接矩形来进行仿射变换来本不能完成校正,但是因为文字与x轴正半轴夹角为15.5,然后最小外接矩形的角度刚好是15.6,经过angle=-angle变换后,输入到旋转矩阵的角度就为-15.5,然后仿射变换的旋转就是,正数就是逆时针旋转,负数就是顺时针旋转,所以将原图顺时针旋转后,就刚好校正了。
参考:
OpenCV实战之三 | 基于OpenCV实现图像校正
相关文章:
OpenCV练习(2)图像校正
1、傅里叶变换 霍夫变换 直线 角度 旋转2、边缘检测 霍夫变换 直线角度 旋转3、四点透视 角度 旋转4、检测矩形轮廓 角度 旋转 1.目的 实现类似全能扫面王的图像校正功能 2. 基于轮廓提取和透射变换 基于轮廓提取和透射变换的矫正算法更适用于车牌、身份证、人民…...

Excel中的“点选输入”——次级下拉列表创建
在Excel中,用“数据验证”功能可以设置下拉列表,二级下拉列表需要设置公式。 (笔记模板由python脚本于2024年06月16日 18:36:37创建,本篇笔记适合经常使用Excel处理数据的coder翻阅) 【学习的细节是欢悦的历程】 Python 官网:http…...

基于 Spring AOP 实现安全检查
在现代应用程序中,安全性是一个至关重要的方面。通过对系统中的关键操作进行安全检查,可以有效防止未授权的访问和操作。Spring AOP(面向切面编程)提供了一种优雅的方式来实现安全检查,而无需修改业务逻辑代码。本文将…...

【MySQL】数据库事务详解
文章目录 前言1. 事务的定义2. 事务的四个特性2.1 原子性2.2 一致性2.3 隔离性2.4 持久性 3. 事务的并发问题3.1 脏读3.2 不可重复读3.3 幻读3.4 更新丢失 4. 事务的隔离级别5. 事务的使用结语 前言 假设我们现在需要操作数据库进行转账,A 给 B 转账 100 块钱&…...

ubuntu链接mysql
C链接mysql 报错 sudo apt-get update sudo apt-get install libmysqlclient-dev 指令编译 g -o mysql_example mysql_example.cpp -I/usr/include/mysql -lmysqlclient g mysql_test.cpp mysql_config --cflags --libs 安装mysql sudo apt updatesudo apt install mysql-…...

QStyledItemDelegate 和 QItemDelegate 的作用
在Qt中,QStyledItemDelegate和QItemDelegate是用于自定义和控制项视图控件(如QListView、QTableView、QTreeView)中项的显示和编辑的委托类。它们提供了对项的外观和编辑行为的定制能力。尽管它们在功能上有相似之处,但它们之间有…...
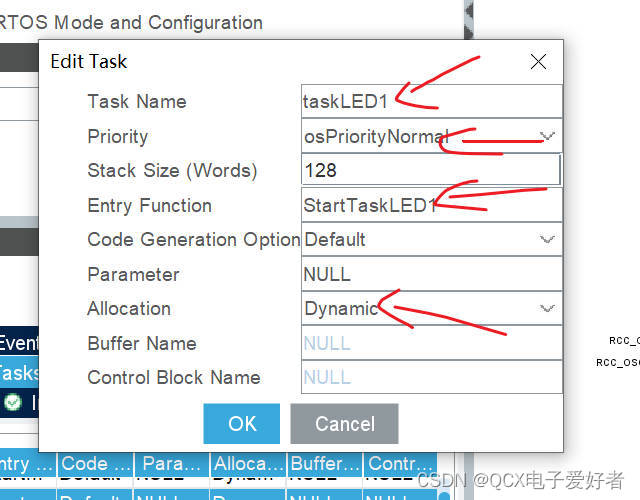
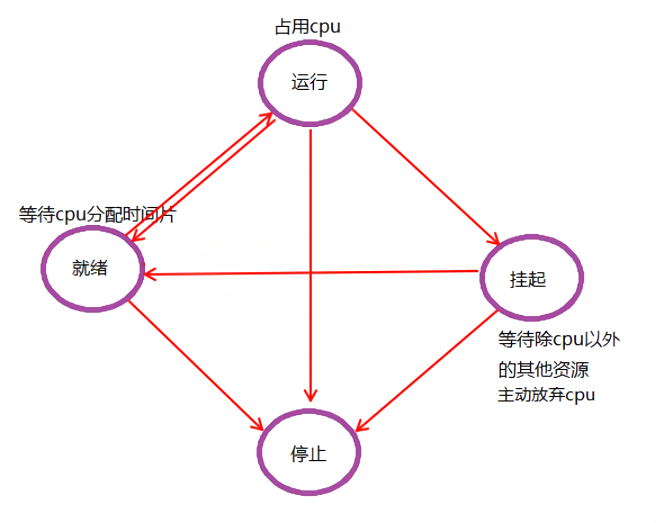
3.任务的创建与删除
1.什么是任务? 任务可以理解为进程/线程,创建一个任务,就会在内存开辟一个空间。 任务通常都含有while(1)死循环 2.任务创建与删除相关的函数 3.CUBEMAX相关配置 编辑一个led1闪烁的任务...
进程、CPU、MMU与PCB之间的关系
目录 进程与cpu(中央处理器) 源代码、程序、cpu与进程的关系 cpu超线程 CPU的简易架构与处理数据过程 进程与MMU(内存管理单元) mmu作用 cpu和mmu的关系 进程与PCB(进程控制块) PCB介绍与内部成员…...

代码随想录算法训练营Day50|1143.最长公共子序列、1035.不相交的线、53.最大子序和、392.判断子序列
最长公共子序列 1143. 最长公共子序列 - 力扣(LeetCode) 代码随想录 (programmercarl.com) 最长公共子序列 - 动态规划 Longest Common Subsequence - Dynamic Programming_哔哩哔哩_bilibili 本题和上一题718.最长重复子数组在很多方面相似…...

国家自然科学基金标书大全(2002-2024)
数据来源:在20世纪80年代初,为了促进中国的科技体制革新并改革科研资金分配机制,中国科学院的89位院士联名向党和国家领导人提出建议,设立了国家自然科学基金的设立。国自然基金自创立以来,根据国家发展科学技术方针、…...

Python代码打包成exe应用
目录 一、前期准备 二、Pyinstaller打包步骤 Pyinstaller参数详解 三、测试 Spec 文件相关命令 一、前期准备 (1)首先,我们需要确保你的代码可以在本地电脑上的pycharm正常运行成功。 (2)我们要先安装Pyinstalle…...
CesiumJS【Basic】- #016 多边形面渲染“花了”的问题
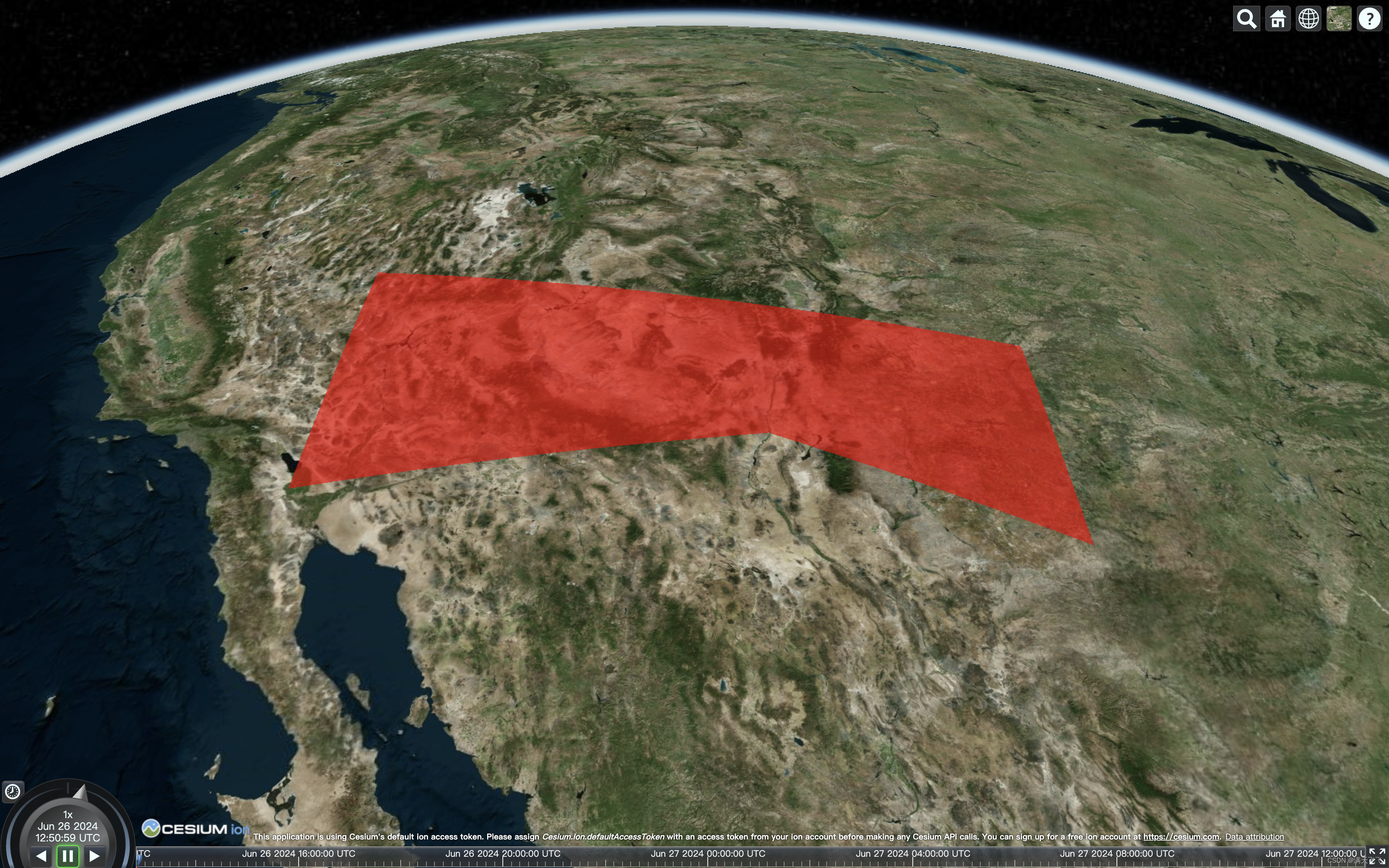
文章目录 多边形面渲染“花了”的问题1 目标2 问题代码3 修正后代码4 总结多边形面渲染“花了”的问题 1 目标 解决多边形的面“花了”的问题 2 问题代码 使用Cesium.PerInstanceColorAppearance渲染后出现色斑 import * as Cesium from "cesium";const viewer …...

qt 开发对信号槽进行二次封装,实现信号槽管理接口。
最近做的一个项目,由于工程需要模块之间能够互相通信,但又不想模块之间耦合度太高 使用信号槽的话,需要两个类的对象或者指针在其中一个类都要体现,这样达不到效果, 想要一个管理类对这些互相通信的类之间进行管理,只需要在各自的类注册发送者和接收者即可,双方通过一…...
本地项目上传到gitee
本地项目通过webstorm上传到gitee 1.登录gitee选择新建仓库 2.输入新建仓库的名字(名字与本地项目名一致) 3.复制链接 4.找到本地项目,选中地址输入cmd打开命令提示框 5.输入git init初始化git,生成.git文件 6.webstorm中打开项目…...
ONLYOFFICE 8.1版本桌面编辑器测评:超越想象的办公体验!
在当今数字化办公时代,一个功能强大、操作便捷的办公套件对于提高工作效率至关重要。ONLYOFFICE 8.1作为一款备受瞩目的办公软件,凭借其全面的功能、优异的性能和出色的用户体验,为用户带来了超越想象的办公体验。下面,我们将对ON…...

中介子方程三十四
XXFXXuXXWXXuXXdXXrXXαXXuXpXXKXηXiXXαXXiXηXKXXpXuXXαXXrXXdXXuXWXπXXWXeXyXeXbXπXpXXNXXqXeXXrXXαXXuXpXXKXηXiXXαXXiXηXKXXpXuXXαXXrXXeXqXXNXXpXπXbXeXyXeXWXXπXWXuXXdXXrXXαXXuXpXXKXηXiXXαXXiXηXKXXpXuXXαXXrXXdXXuXXWXXuXXFXXEXXyXXEXXrXXαXXuXpXXK…...
最新Sublime Text软件安装包分享(汉化版本)
Sublime Text 是一款广受欢迎的跨平台文本编辑器,专为代码、标记和散文编辑而设计。它以其简洁的用户界面、强大的功能和高性能而著称,深受开发者和写作者的喜爱。 一、下载地址 链接:https://pan.baidu.com/s/1kErSkvc7WnML7fljQZlcOg?pwdk…...
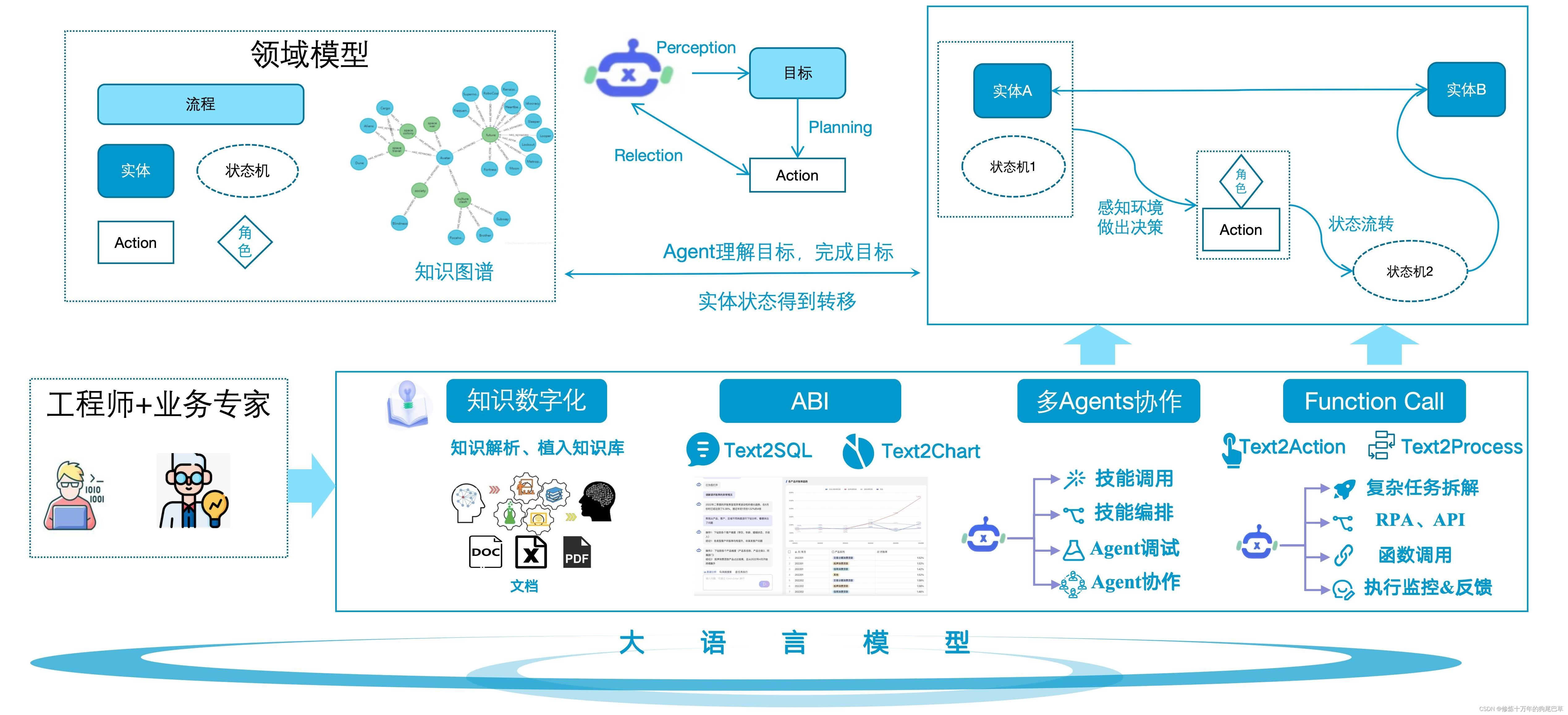
AI-智能体基础设施
个性化记忆需要世界模型来协助构建 业界有一个精简的Agent表达公示,即:Agent大模型(LLM)记忆(Memory)主动规划(Planning)工具使用(Tool Use)。基于该公式&am…...

【docker】docker启动neo4j,并配置内存
注意下:--volume宿主机目录:/data 和 --publish宿主机port:7474 --publish宿主机port:7687 docker run -d \ --publish9801:7474 --publish9802:7687 \ --env NEO4J_AUTHneo4j/passwd \ --volume/opt/docker/data/vol-data/neo4j4.2:/data \ --restart always \ --…...

面试准备记录
6月26日 今日学习 MySQL的1-7题(中期报告,加上玩了游戏,就没有认真背题) 6月25日 今日复习 JVM的内存管理部分(1-31题) 6月24日 今日学习 类的生命周期?类加载过程?类加载器有…...

从“芯”出发:RK3588与树莓派5的硬件博弈与开发者抉择
1. 芯片架构的硬核对决 当RK3588遇上树莓派5,这场硬件较量就像两位武林高手过招。RK3588用的是台积电8nm工艺,四核Cortex-A76加四核Cortex-A55的big.LITTLE设计,主频最高2.4GHz。实测跑分时,A76大核单核性能比树莓派5的Cortex-A76…...

从一次安全扫描报告说起:聊聊SSH Banner泄露那些事儿,以及比修改Banner更重要的安全习惯
从SSH版本泄露看现代安全防御:工程师的深度实践指南 那天下午,我正在整理新部署的云服务器集群的安全扫描报告,一个看似"古老"的漏洞引起了我的注意——CVE-1999-0634,SSH版本信息可被获取。这个诞生于上世纪的安全问题…...

UPS不间断电源正确使用指南:从开机到维护,一文掌握核心要点
凌晨两点,服务器机房突然跳闸,运维人员慌乱中误按UPS不间断电源关机键,导致核心数据丢失——这样的事故,本可通过规范操作避免。UPS电源作为电力保障的“最后一道防线”,其使用方法直接影响设备寿命与数据安全。本文结…...

个人股票数据中枢构建指南:从多源聚合到Python量化分析
1. 项目概述:一个为个人投资者打造的股票数据中枢如果你和我一样,是个喜欢自己动手折腾、对市场数据有“洁癖”的个人投资者,那你肯定也经历过这样的烦恼:想分析一只股票,数据源五花八门,格式千奇百怪&…...

怎样高效使用大麦网抢票神器:3步快速配置Python自动化脚本终极指南
怎样高效使用大麦网抢票神器:3步快速配置Python自动化脚本终极指南 【免费下载链接】DamaiHelper 大麦网演唱会演出抢票脚本。 项目地址: https://gitcode.com/gh_mirrors/dama/DamaiHelper 还在为抢不到心仪演唱会门票而烦恼吗?面对秒光的票源和…...

AI任务管理新范式:结构化描述如何提升人机协作效率
1. 项目概述:一个为AI而生的任务管理范式最近在GitHub上看到一个挺有意思的项目,叫todo-for-ai/todo-for-ai。初看名字,你可能会觉得这又是一个普通的待办事项应用,只不过加了个“AI”的噱头。但当我深入探究其设计哲学和实现细节…...

构建统一AI服务网关:OpenAI兼容门面模式实践指南
1. 项目概述:一个兼容OpenAI API的轻量级门面最近在折腾大模型应用开发,发现一个挺普遍的需求:很多团队或个人开发者,手里可能握着不止一个AI服务提供商的API密钥,比如既有官方的OpenAI,也有国内的一些合规…...

Python-ADB协议实现原理:深入理解ADB和Fastboot通信机制
Python-ADB协议实现原理:深入理解ADB和Fastboot通信机制 【免费下载链接】python-adb Python ADB Fastboot implementation 项目地址: https://gitcode.com/gh_mirrors/py/python-adb Python-ADB是一个强大的开源项目,提供了ADB(Andr…...

3D打印技术如何重塑消费电子供应链:从原型验证到小批量生产
1. 项目概述:当3D打印遇上消费电子最近几年,我身边不少做产品设计、硬件开发的朋友,聊天时总会不约而同地提到一个词:3D打印。以前大家觉得这玩意儿就是个做手办、打样机的“玩具”,但现在风向明显变了。尤其是在消费电…...
)
倍福官网改版后,如何用F12开发者工具找回消失的Twincat3老版本安装包(附4024.11下载链接)
倍福官网改版后如何找回消失的Twincat3老版本安装包 作为一名自动化工程师,你是否遇到过这样的困境:项目需要特定版本的Twincat3进行维护或兼容性测试,但倍福官网改版后,历史版本下载入口却神秘消失了?这种情况在工业软…...