OPenFast软件中的NRELOffshrBsline5MW_Onshore_ServoDyn.dat文件详解
我先简单概括一下,后续我再详细总结:文件“NRELOffshrBsline5MW_Onshore_ServoDyn.dat”是用于NREL 5.0 MW基准风力发电机的ServoDyn模块的输入文件。它定义了仿真控制、变桨控制、发电机和扭矩控制、偏航控制以及输出设置等各种参数。以下是主要内容的总结:
-
文件头部信息:
- 提供了文件版本、风力发电机型号和数据来源等基本信息。
-
模拟控制:
- 包含是否回显输入数据和控制器通信间隔等仿真控制参数。
-
变桨控制:
- 定义了变桨控制模式、启动变桨控制的时间、覆盖变桨操作的时间和速率以及叶片的最终变桨角度。
-
发电机和扭矩控制:
- 包括变速控制模式、发电机模型、发电机效率、启动和停止发电机的方法以及相关参数。
-
简单变速扭矩控制:
- 当使用简单变速发电机控制时,定义了额定发电机速度、扭矩和滑移百分比等参数。
-
简单感应发电机:
- 当使用简单感应发电机模型时,定义了定子和转子电阻、同步速度、额定扭矩和拉出比率等参数。
-
Thevenin等效感应发电机:
- 当使用Thevenin等效感应发电机模型时,定义了电网频率、极对数、定子和转子电阻、漏抗和磁化电抗等参数。
-
高速轴制动:
- 包含高速轴制动模型、启动和完全展开制动器的时间以及制动力矩等参数。
-
机舱偏航控制:
- 定义了偏航控制模式、启动偏航控制的时间、中性偏航位置、偏航弹簧和阻尼常数、覆盖偏航操作的时间和速率以及最终偏航角度。
-
调谐质量阻尼器:
- 包含是否计算机舱和塔的调谐质量阻尼器以及相关文件的名称。
-
Bladed接口:
- 定义了动态库的名称和位置、输入文件名称、调用过程名称、通信间隔时间、是否使用线性斜坡、桨距低通滤波器的截止频率、参考偏航角度以及相关控制和设定值。
-
Bladed接口扭矩-速度查找表:
- 定义了扭矩-速度查找表中的点数和相应的扭矩-速度对。
-
输出设置:
- 包含是否打印摘要数据、输出文件的位置、是否使用制表符分隔、文本表格输出的格式、开始输出的时间以及输出参数列表。
OPenFast
- 在这里插入图片描述
- 一. 第一段
- 1. 文件头部信息
- 2. 模拟控制
- 3. 变桨控制
- 二. 第2段
- 发电机和扭矩控制
- 三,第3段
- 简单变速扭矩控制
- 简单感应发电机
- 四,第4段
- Thevenin等效感应发电机
- 五,第5段
- 高速轴制动
- 六,第6段
- 机舱偏航控制
- 七,第7段
- 调谐质量阻尼器
- 八,第八段
- Bladed接口
- 九,第九段
- Bladed接口扭矩-速度查找表
- 输出
- 总结
一. 第一段
1. 文件头部信息
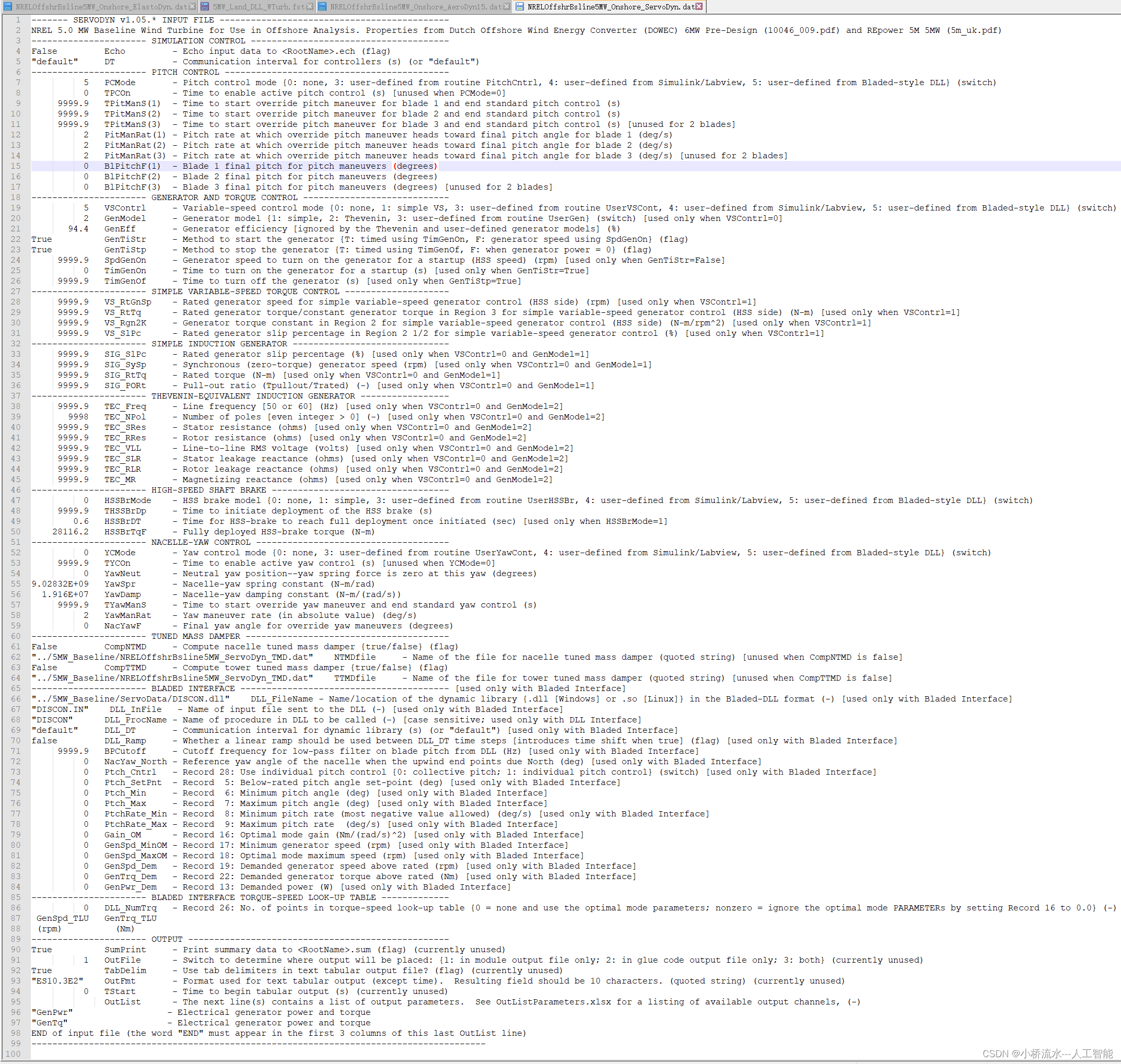
------- SERVODYN v1.05.* INPUT FILE --------------------------------------------
NREL 5.0 MW Baseline Wind Turbine for Use in Offshore Analysis. Properties from Dutch Offshore Wind Energy Converter (DOWEC) 6MW Pre-Design (10046_009.pdf) and REpower 5M 5MW (5m_uk.pdf)
解释: 这是一个ServoDyn模块的输入文件,用于NREL 5.0 MW基准风力发电机的离岸(陆上)分析。其属性基于Dutch Offshore Wind Energy Converter (DOWEC) 6MW的预设计和REpower 5M 5MW的资料。
2. 模拟控制
---------------------- SIMULATION CONTROL --------------------------------------
False Echo - Echo input data to <RootName>.ech (flag)
"default" DT - Communication interval for controllers (s) (or "default")
解释:
Echo:False表示不将输入数据回显到<RootName>.ech文件。DT: 控制器的通信间隔时间(秒)。设为"default"表示使用默认值。
3. 变桨控制
---------------------- PITCH CONTROL -------------------------------------------5 PCMode - Pitch control mode {0: none, 3: user-defined from routine PitchCntrl, 4: user-defined from Simulink/Labview, 5: user-defined from Bladed-style DLL} (switch)0 TPCOn - Time to enable active pitch control (s) [unused when PCMode=0]9999.9 TPitManS(1) - Time to start override pitch maneuver for blade 1 and end standard pitch control (s)9999.9 TPitManS(2) - Time to start override pitch maneuver for blade 2 and end standard pitch control (s)9999.9 TPitManS(3) - Time to start override pitch maneuver for blade 3 and end standard pitch control (s) [unused for 2 blades]2 PitManRat(1) - Pitch rate at which override pitch maneuver heads toward final pitch angle for blade 1 (deg/s)2 PitManRat(2) - Pitch rate at which override pitch maneuver heads toward final pitch angle for blade 2 (deg/s)2 PitManRat(3) - Pitch rate at which override pitch maneuver heads toward final pitch angle for blade 3 (deg/s) [unused for 2 blades]0 BlPitchF(1) - Blade 1 final pitch for pitch maneuvers (degrees)0 BlPitchF(2) - Blade 2 final pitch for pitch maneuvers (degrees)0 BlPitchF(3) - Blade 3 final pitch for pitch maneuvers (degrees) [unused for 2 blades]
解释:
PCMode: 变桨控制模式,设为5表示使用Bladed样式的DLL(动态链接库)。TPCOn: 启用主动变桨控制的时间(秒),在PCMode=0时不使用。TPitManS(1)、TPitManS(2)、TPitManS(3): 分别为第1、第2、第3片叶片启动覆盖变桨操作并结束标准变桨控制的时间(秒),设为9999.9表示不启用。PitManRat(1)、PitManRat(2)、PitManRat(3): 覆盖变桨操作期间,第1、第2、第3片叶片向最终变桨角度推进的变桨速率(度/秒)。BlPitchF(1)、BlPitchF(2)、BlPitchF(3): 第1、第2、第3片叶片变桨操作的最终变桨角度(度),均设为0。
二. 第2段
发电机和扭矩控制
---------------------- GENERATOR AND TORQUE CONTROL ----------------------------5 VSContrl - Variable-speed control mode {0: none, 1: simple VS, 3: user-defined from routine UserVSCont, 4: user-defined from Simulink/Labview, 5: user-defined from Bladed-style DLL} (switch)2 GenModel - Generator model {1: simple, 2: Thevenin, 3: user-defined from routine UserGen} (switch) [used only when VSContrl=0]94.4 GenEff - Generator efficiency [ignored by the Thevenin and user-defined generator models] (%)
True GenTiStr - Method to start the generator {T: timed using TimGenOn, F: generator speed using SpdGenOn} (flag)
True GenTiStp - Method to stop the generator {T: timed using TimGenOf, F: when generator power = 0} (flag)9999.9 SpdGenOn - Generator speed to turn on the generator for a startup (HSS speed) (rpm) [used only when GenTiStr=False]0 TimGenOn - Time to turn on the generator for a startup (s) [used only when GenTiStr=True]9999.9 TimGenOf - Time to turn off the generator (s) [used only when GenTiStp=True]
解释:
VSContrl: 变速控制模式,设为5表示使用Bladed样式的DLL(动态链接库)。GenModel: 发电机模型,设为2表示使用Thevenin模型。这只在VSContrl=0时使用。GenEff: 发电机效率,设为94.4%,在使用Thevenin和自定义发电机模型时被忽略。GenTiStr: 发电机启动的方法,设为True表示使用TimGenOn进行定时启动,设为False表示使用SpdGenOn的发电机速度启动。GenTiStp: 发电机停止的方法,设为True表示使用TimGenOf进行定时停止,设为False表示当发电机功率为0时停止。SpdGenOn: 发电机启动的速度(高转速轴速度,单位:转/分钟),只在GenTiStr=False时使用。设为9999.9表示不使用速度启动。TimGenOn: 发电机启动的时间(秒),只在GenTiStr=True时使用,设为0表示立即启动。TimGenOf: 发电机停止的时间(秒),只在GenTiStp=True时使用,设为9999.9表示不使用定时停止。
三,第3段
简单变速扭矩控制
---------------------- SIMPLE VARIABLE-SPEED TORQUE CONTROL --------------------9999.9 VS_RtGnSp - Rated generator speed for simple variable-speed generator control (HSS side) (rpm) [used only when VSContrl=1]9999.9 VS_RtTq - Rated generator torque/constant generator torque in Region 3 for simple variable-speed generator control (HSS side) (N-m) [used only when VSContrl=1]9999.9 VS_Rgn2K - Generator torque constant in Region 2 for simple variable-speed generator control (HSS side) (N-m/rpm^2) [used only when VSContrl=1]9999.9 VS_SlPc - Rated generator slip percentage in Region 2 1/2 for simple variable-speed generator control (%) [used only when VSContrl=1]
解释:
VS_RtGnSp: 简单变速发电机控制下的额定发电机速度(高转速轴侧,单位:转/分钟),仅在VSContrl=1时使用。设为9999.9表示不使用。VS_RtTq: 简单变速发电机控制下的额定发电机扭矩/在Region 3中的恒定发电机扭矩(高转速轴侧,单位:牛顿·米),仅在VSContrl=1时使用。设为9999.9表示不使用。VS_Rgn2K: 简单变速发电机控制下Region 2中的发电机扭矩常数(高转速轴侧,单位:牛顿·米/转^2),仅在VSContrl=1时使用。设为9999.9表示不使用。VS_SlPc: 简单变速发电机控制下Region 2 1/2中的额定发电机滑移百分比(%),仅在VSContrl=1时使用。设为9999.9表示不使用。
简单感应发电机
---------------------- SIMPLE INDUCTION GENERATOR ------------------------------9999.9 SIG_SlPc - Rated generator slip percentage (%) [used only when VSContrl=0 and GenModel=1]9999.9 SIG_SySp - Synchronous (zero-torque) generator speed (rpm) [used only when VSContrl=0 and GenModel=1]9999.9 SIG_RtTq - Rated torque (N-m) [used only when VSContrl=0 and GenModel=1]9999.9 SIG_PORt - Pull-out ratio (Tpullout/Trated) (-) [used only when VSContrl=0 and GenModel=1]
解释:
SIG_SlPc: 简单感应发电机的额定发电机滑移百分比(%),仅在VSContrl=0和GenModel=1时使用。设为9999.9表示不使用。SIG_SySp: 简单感应发电机的同步(零扭矩)发电机速度(转/分钟),仅在VSContrl=0和GenModel=1时使用。设为9999.9表示不使用。SIG_RtTq: 简单感应发电机的额定扭矩(牛顿·米),仅在VSContrl=0和GenModel=1时使用。设为9999.9表示不使用。SIG_PORt: 简单感应发电机的拉出比率(Tpullout/Trated),仅在VSContrl=0和GenModel=1时使用。设为9999.9表示不使用。
四,第4段
Thevenin等效感应发电机
---------------------- THEVENIN-EQUIVALENT INDUCTION GENERATOR -----------------9999.9 TEC_Freq - Line frequency [50 or 60] (Hz) [used only when VSContrl=0 and GenModel=2]9998 TEC_NPol - Number of poles [even integer > 0] (-) [used only when VSContrl=0 and GenModel=2]9999.9 TEC_SRes - Stator resistance (ohms) [used only when VSContrl=0 and GenModel=2]9999.9 TEC_RRes - Rotor resistance (ohms) [used only when VSContrl=0 and GenModel=2]9999.9 TEC_VLL - Line-to-line RMS voltage (volts) [used only when VSContrl=0 and GenModel=2]9999.9 TEC_SLR - Stator leakage reactance (ohms) [used only when VSContrl=0 and GenModel=2]9999.9 TEC_RLR - Rotor leakage reactance (ohms) [used only when VSContrl=0 and GenModel=2]9999.9 TEC_MR - Magnetizing reactance (ohms) [used only when VSContrl=0 and GenModel=2]
解释:
TEC_Freq: 电网频率(单位:赫兹),值为50或60,仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_NPol: 极对数,值为大于0的偶整数,仅在VSContrl=0且GenModel=2时使用。设为9998表示不使用。TEC_SRes: 定子电阻(单位:欧姆),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_RRes: 转子电阻(单位:欧姆),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_VLL: 线电压的RMS值(单位:伏特),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_SLR: 定子漏抗(单位:欧姆),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_RLR: 转子漏抗(单位:欧姆),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_MR: 磁化电抗(单位:欧姆),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。
五,第5段
高速轴制动
---------------------- HIGH-SPEED SHAFT BRAKE ----------------------------------0 HSSBrMode - HSS brake model {0: none, 1: simple, 3: user-defined from routine UserHSSBr, 4: user-defined from Simulink/Labview, 5: user-defined from Bladed-style DLL} (switch)9999.9 THSSBrDp - Time to initiate deployment of the HSS brake (s)0.6 HSSBrDT - Time for HSS-brake to reach full deployment once initiated (sec) [used only when HSSBrMode=1]28116.2 HSSBrTqF - Fully deployed HSS-brake torque (N-m)
解释:
HSSBrMode: 高速轴制动模式,设为0表示不使用制动模型。选项包括:0: 不使用制动模型1: 简单制动模型3: 自定义制动模型(来自UserHSSBr例程)4: 自定义制动模型(来自Simulink/Labview)5: 自定义制动模型(来自Bladed样式DLL)
THSSBrDp: 启动高速轴制动的时间(秒),设为9999.9表示不使用。HSSBrDT: 高速轴制动器在启动后完全展开所需的时间(秒),仅在HSSBrMode=1时使用。此处设为0.6秒。HSSBrTqF: 高速轴制动器完全展开时的制动力矩(牛顿·米),此处设为28116.2牛顿·米。
六,第6段
机舱偏航控制
---------------------- NACELLE-YAW CONTROL -------------------------------------0 YCMode - Yaw control mode {0: none, 3: user-defined from routine UserYawCont, 4: user-defined from Simulink/Labview, 5: user-defined from Bladed-style DLL} (switch)9999.9 TYCOn - Time to enable active yaw control (s) [unused when YCMode=0]0 YawNeut - Neutral yaw position--yaw spring force is zero at this yaw (degrees)
9.02832E+09 YawSpr - Nacelle-yaw spring constant (N-m/rad)1.916E+07 YawDamp - Nacelle-yaw damping constant (N-m/(rad/s))9999.9 TYawManS - Time to start override yaw maneuver and end standard yaw control (s)2 YawManRat - Yaw maneuver rate (in absolute value) (deg/s)0 NacYawF - Final yaw angle for override yaw maneuvers (degrees)
解释:
YCMode: 偏航控制模式,设为0表示不使用偏航控制。选项包括:0: 不使用偏航控制3: 自定义偏航控制(来自UserYawCont例程)4: 自定义偏航控制(来自Simulink/Labview)5: 自定义偏航控制(来自Bladed样式DLL)
TYCOn: 启用主动偏航控制的时间(秒),在YCMode=0时不使用。设为9999.9表示不使用。YawNeut: 中性偏航位置,在此偏航角度下偏航弹簧力为零(度),设为0度。YawSpr: 机舱偏航弹簧常数(单位:牛顿·米/弧度),设为9.02832E+09。YawDamp: 机舱偏航阻尼常数(单位:牛顿·米/(弧度/秒)),设为1.916E+07。TYawManS: 启动覆盖偏航操作并结束标准偏航控制的时间(秒),设为9999.9表示不使用。YawManRat: 偏航操作速率(绝对值,单位:度/秒),设为2度/秒。NacYawF: 覆盖偏航操作的最终偏航角度(度),设为0度。
七,第7段
调谐质量阻尼器
---------------------- TUNED MASS DAMPER ---------------------------------------
False CompNTMD - Compute nacelle tuned mass damper {true/false} (flag)
"../5MW_Baseline/NRELOffshrBsline5MW_ServoDyn_TMD.dat" NTMDfile - Name of the file for nacelle tuned mass damper (quoted string) [unused when CompNTMD is false]
False CompTTMD - Compute tower tuned mass damper {true/false} (flag)
"../5MW_Baseline/NRELOffshrBsline5MW_ServoDyn_TMD.dat" TTMDfile - Name of the file for tower tuned mass damper (quoted string) [unused when CompTTMD is false]
解释:
CompNTMD: 计算机舱调谐质量阻尼器的标志,设为False表示不计算。选项包括true或false。NTMDfile: 机舱调谐质量阻尼器文件的名称(引用的字符串),仅在CompNTMD为true时使用。此处设为"../5MW_Baseline/NRELOffshrBsline5MW_ServoDyn_TMD.dat"。CompTTMD: 计算塔调谐质量阻尼器的标志,设为False表示不计算。选项包括true或false。TTMDfile: 塔调谐质量阻尼器文件的名称(引用的字符串),仅在CompTTMD为true时使用。此处设为"../5MW_Baseline/NRELOffshrBsline5MW_ServoDyn_TMD.dat"。
八,第八段
Bladed接口
---------------------- BLADED INTERFACE ---------------------------------------- [used only with Bladed Interface]
"../5MW_Baseline/ServoData/DISCON.dll" DLL_FileName - Name/location of the dynamic library {.dll [Windows] or .so [Linux]} in the Bladed-DLL format (-) [used only with Bladed Interface]
"DISCON.IN" DLL_InFile - Name of input file sent to the DLL (-) [used only with Bladed Interface]
"DISCON" DLL_ProcName - Name of procedure in DLL to be called (-) [case sensitive; used only with DLL Interface]
"default" DLL_DT - Communication interval for dynamic library (s) (or "default") [used only with Bladed Interface]
false DLL_Ramp - Whether a linear ramp should be used between DLL_DT time steps [introduces time shift when true] (flag) [used only with Bladed Interface]9999.9 BPCutoff - Cutoff frequency for low-pass filter on blade pitch from DLL (Hz) [used only with Bladed Interface]0 NacYaw_North - Reference yaw angle of the nacelle when the upwind end points due North (deg) [used only with Bladed Interface]0 Ptch_Cntrl - Record 28: Use individual pitch control {0: collective pitch; 1: individual pitch control} (switch) [used only with Bladed Interface]0 Ptch_SetPnt - Record 5: Below-rated pitch angle set-point (deg) [used only with Bladed Interface]0 Ptch_Min - Record 6: Minimum pitch angle (deg) [used only with Bladed Interface]0 Ptch_Max - Record 7: Maximum pitch angle (deg) [used only with Bladed Interface]0 PtchRate_Min - Record 8: Minimum pitch rate (most negative value allowed) (deg/s) [used only with Bladed Interface]0 PtchRate_Max - Record 9: Maximum pitch rate (deg/s) [used only with Bladed Interface]0 Gain_OM - Record 16: Optimal mode gain (Nm/(rad/s)^2) [used only with Bladed Interface]0 GenSpd_MinOM - Record 17: Minimum generator speed (rpm) [used only with Bladed Interface]0 GenSpd_MaxOM - Record 18: Optimal mode maximum speed (rpm) [used only with Bladed Interface]0 GenSpd_Dem - Record 19: Demanded generator speed above rated (rpm) [used only with Bladed Interface]0 GenTrq_Dem - Record 22: Demanded generator torque above rated (Nm) [used only with Bladed Interface]0 GenPwr_Dem - Record 13: Demanded power (W) [used only with Bladed Interface]
解释:
DLL_FileName: 动态库的名称和位置,格式为DLL(Windows)或SO(Linux)。此处设为"../5MW_Baseline/ServoData/DISCON.dll"。DLL_InFile: 发送到DLL的输入文件名称,设为"DISCON.IN"。DLL_ProcName: 调用DLL中的过程名称,大小写敏感,设为"DISCON"。DLL_DT: 动态库的通信间隔时间(秒),或设为"default"使用默认值。DLL_Ramp: 在DLL_DT时间步之间是否使用线性斜坡,当设为true时引入时间偏移,设为false。BPCutoff: DLL中对桨距低通滤波器的截止频率(赫兹),设为9999.9表示不使用。NacYaw_North: 当迎风端朝北时机舱的参考偏航角度(度),设为0。Ptch_Cntrl: 使用单独桨距控制(0:集体桨距;1:单独桨距控制),设为0。Ptch_SetPnt: 额定以下桨距角设定值(度),设为0。Ptch_Min: 最小桨距角(度),设为0。Ptch_Max: 最大桨距角(度),设为0。PtchRate_Min: 最小桨距速率(允许的最小值,负值)(度/秒),设为0。PtchRate_Max: 最大桨距速率(度/秒),设为0。Gain_OM: 最佳模式增益(牛·米/(弧度/秒)^2),设为0。GenSpd_MinOM: 最小发电机速度(转/分钟),设为0。GenSpd_MaxOM: 最佳模式最大速度(转/分钟),设为0。GenSpd_Dem: 超过额定的发电机需求速度(转/分钟),设为0。GenTrq_Dem: 超过额定的发电机需求扭矩(牛·米),设为0。GenPwr_Dem: 需求功率(瓦特),设为0。
九,第九段
Bladed接口扭矩-速度查找表
---------------------- BLADED INTERFACE TORQUE-SPEED LOOK-UP TABLE -------------0 DLL_NumTrq - Record 26: No. of points in torque-speed look-up table {0 = none and use the optimal mode parameters; nonzero = ignore the optimal mode PARAMETERS by setting Record 16 to 0.0} (-) [used only with Bladed Interface]GenSpd_TLU GenTrq_TLU(rpm) (Nm)
解释:
DLL_NumTrq: 扭矩-速度查找表中的点数,设为0表示不使用查找表并使用最佳模式参数。非零值表示忽略最佳模式参数并将Record 16设为0.0。
输出
---------------------- OUTPUT --------------------------------------------------
True SumPrint - Print summary data to <RootName>.sum (flag) (currently unused)1 OutFile - Switch to determine where output will be placed: {1: in module output file only; 2: in glue code output file only; 3: both} (currently unused)
True TabDelim - Use tab delimiters in text tabular output file? (flag) (currently unused)
"ES10.3E2" OutFmt - Format used for text tabular output (except time). Resulting field should be 10 characters. (quoted string) (currently unused)0 TStart - Time to begin tabular output (s) (currently unused)OutList - The next line(s) contains a list of output parameters. See OutListParameters.xlsx for a listing of available output channels, (-)
"GenPwr" - Electrical generator power and torque
"GenTq" - Electrical generator power and torque
END of input file (the word "END" must appear in the first 3 columns of this last OutList line)
---------------------------------------------------------------------------------------
解释:
SumPrint: 是否将摘要数据打印到<RootName>.sum文件,设为True表示打印(当前未使用)。OutFile: 确定输出将放置的位置:1: 仅在模块输出文件中2: 仅在胶合代码输出文件中3: 两者都有
目前设为1(当前未使用)。
TabDelim: 在文本表格输出文件中使用制表符分隔,设为True表示使用(当前未使用)。OutFmt: 用于文本表格输出的格式(除了时间)。结果字段应为10个字符的长度。设为"ES10.3E2"(当前未使用)。TStart: 开始表格输出的时间(秒),设为0(当前未使用)。OutList: 列表中包含输出参数。可用输出通道的列表请参见OutListParameters.xlsx。"GenPwr": 电力发电机的功率和扭矩"GenTq": 电力发电机的功率和扭矩
END: 输入文件的结束标记,必须出现在最后一行的前3列。
总结
这个文件定义了NREL 5MW风力发电机在OpenFAST仿真中使用的各种控制参数和输出设置,包括变桨控制、发电机和扭矩控制、偏航控制以及Bladed接口的配置。通过这些配置,可以调整风力发电机的仿真行为和输出结果,以便更好地理解和优化其性能。
相关文章:
OPenFast软件中的NRELOffshrBsline5MW_Onshore_ServoDyn.dat文件详解
我先简单概括一下,后续我再详细总结:文件“NRELOffshrBsline5MW_Onshore_ServoDyn.dat”是用于NREL 5.0 MW基准风力发电机的ServoDyn模块的输入文件。它定义了仿真控制、变桨控制、发电机和扭矩控制、偏航控制以及输出设置等各种参数。以下是主要内容的总…...

搭建rtmp/rtsp流媒体服务器的步骤
很多文章介绍使用ffmpeg推送和拉流,执行推流命令: D:\software\ffmpeg-7.0.1-full_build\bin\ffmpeg.exe -re -stream_loop -1 -i "D:\Video\汪汪队立大功\S07\001.mp4" -vcodec h264 -acodec aac -f flv rtmp://127.0.0.1/live/test110 经常…...

vue自定义事件传递数据
页面应用一个组件,采用自定义事件来传递参数 $emit是Vue实例的一个方法,它用于触发自定义事件。这些事件可以被父组件监听到,从而实现子组件向父组件的通信。 这种方法的好处在于,它可以让数据的流动保持单向,有助于…...

TensorBoard 安装与启动
安装:pip install tensorboard启动:tensorboard --logdir<events_directory_name> events_directory_name 为运行 tensorboard 后,产生的 events 文件所在的路径 博客参考:TensorBoard最全使用教程...

云计算运维工程师的突发状况处理
云计算运维工程师在应对突发的故障和紧急情况时,需要采取一系列迅速而有效的措施来最小化服务中断的时间并恢复系统的稳定性。 以下是一些关键步骤和策略: 快速响应: 立即识别并确认故障的性质和范围。通知团队成员和相关的利益相关者,确保所有人了解当前情况。故障诊断:…...

【CSS in Depth 2 精译】1.6 本章小结
1.6 本章小结 浏览器遵循层叠规则来确定哪些样式在哪些元素上生效;选择器优先级由选择器中的 id 数、class 类的个数以及标签名的个数来共同确定。优先级更高的声明将覆盖较低声明;当某些属性没有层叠值时,它们会从父元素继承一个样式值。这…...

FFmpeg源码:ff_h2645_extract_rbsp函数分析
一、ff_h2645_extract_rbsp函数的声明 ff_h2645_extract_rbsp函数的声明放在FFmpeg源码(本文演示用的FFmpeg源码版本为5.0.3,该ffmpeg在CentOS 7.5上通过10.2.1版本的gcc编译)的头文件libavcodec/h2645_parse.h中。 /*** Extract the raw (u…...
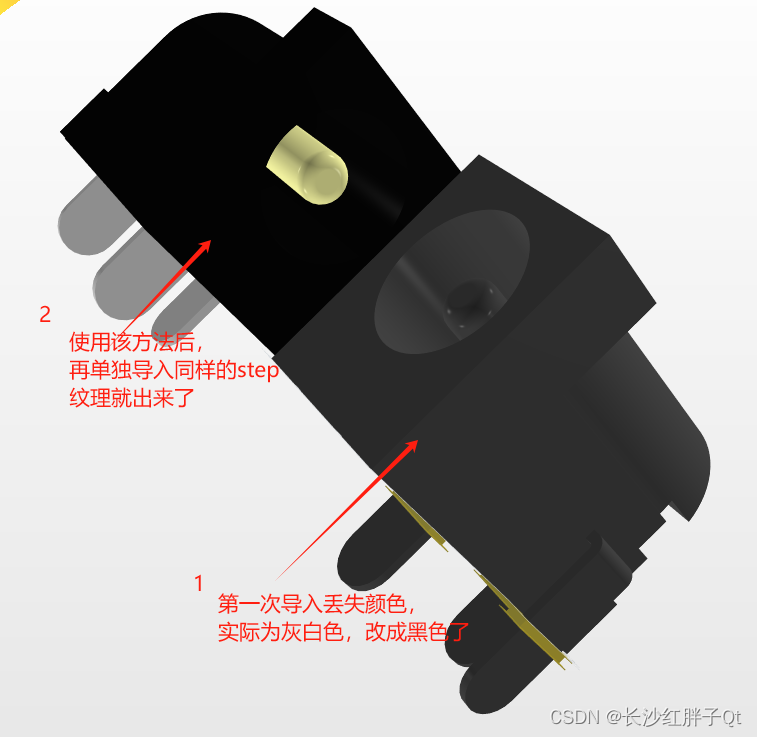
关于 AD21导入电子元器件放置“3D体”STEP模型失去3D纹理贴图 的解决方法
若该文为原创文章,转载请注明原文出处 本文章博客地址:https://hpzwl.blog.csdn.net/article/details/139969415 长沙红胖子Qt(长沙创微智科)博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV…...

【JAVA】利用Redisson和Spring实现高效物联温度控制链路,确保温度调节的准确性和效率,定时链路执行使用案例,一环扣一环
主要功能和场景 柔性调温策略:这个类主要用于管理一个温度调节流程,通过不同的策略(如策略1和策略2)来调节温度,确保设备或环境中的温度达到预设的目标。 紧急停止机制:在流程执行过程中,如果需…...

yolov8部署资料
1.labelImg安装: labelImg的安装过程可以参照以下步骤进行,这里以Windows操作系统为例: 1. 检查Python环境 首先,需要确认你的电脑上是否已经安装了Python。你可以通过Win R打开windows“运行”对话框,输入cmd&#x…...

迅为RK3588开发板支持LVDS信号,标准 HDMI信号,IMIPI信号
性能强--iTOP-3588开发板采用瑞芯微RK3588处理器,是全新一代ALoT高端应用芯片,采用8nm LP制程,搭载八核64位CPU,四核Cortex-A76和四核Cortex-A55架构,主频高达2.4GHZ,8GB内存,32GB EMMC。 四核心…...
页面开发感想
页面开发 1、 前端预览 2、一些思路 2.1、首页自定义element-plus的走马灯 :deep(.el-carousel__arrow){border-radius: 0%;height: 10vh; }需要使用:deep(标签)才能修改样式 或者 ::v-deep 标签 2.2、整体设计思路 <template><div class"card" style&…...

TikTok达人合作ROI分析:品牌如何评估带货效果
在当今的数字营销时代,TikTok已经成为品牌推广和消费者互动的重要平台。通过与TikTok达人的合作,品牌可以有效地提升其市场影响力和销售额。其中,评估这些合作的投入产出比(ROI)对于品牌来说是至关重要的。本文Nox聚星…...
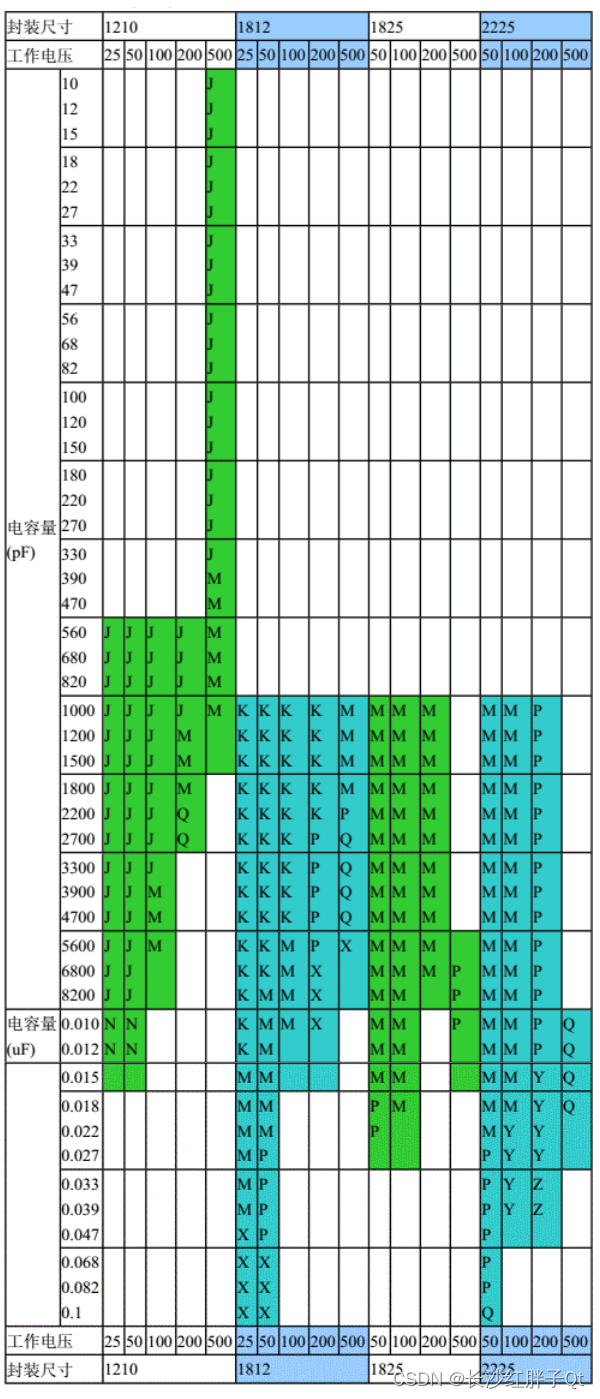
硬件实用技巧:电容精度和常用容值表
若该文为原创文章,转载请注明原文出处 本文章博客地址:https://hpzwl.blog.csdn.net/article/details/140009042 长沙红胖子Qt(长沙创微智科)博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV…...

Java面试题:内存管理、类加载机制、对象生命周期及性能优化
1. 说一下 JVM 的主要组成部分及其作用? JVM包含两个子系统和两个组件:Class loader(类装载)、Execution engine(执行引擎)、Runtime data area(运行时数据区)、Native Interface(本地接口)。 Class loader(类装载):根据给定的全限定名类名(如:java.lang.Object)装载class文…...

什么是 Payment Request API?
Payment Request API 是一个 Web API,允许网页和 Web 应用程序向用户展示一个标准化的支付界面,以便用户快速、方便地进行付款。这种 API 的设计目的是为了简化用户支付过程,提高支付转化率,并提供一种更加统一的支付体验。 支持…...

【杂记-浅谈EBGP外部边界网关协议、IBGP内部边界网关协议】
一、EBGP概述 EBGP,External Border Gateway Protocol,即外部边界网关协议,EBGP主要用于在不同自治系统(AS)之间交换路由信息,每个AS都有一个独特的AS号码,用于区分不同的自治系统。EBGP通过AS…...
基于Java的宠物领养管理系统【附源码】
摘 要 近些年来,随着科技的飞速发展,互联网的普及逐渐延伸到各行各业中,给人们生活带来了十分的便利,宠物管理系统利用计算机网络实现信息化管理,使整个宠物领养的发展和服务水平有显著提升。 本文拟采用IDEA开发工具…...

Grafana 对接 Zabbix 数据源API错误
介绍 主要报错为 Invalid params. Invalid parameter "/": unexpected parameter "user". 主要原因为Zabbix 6.4.0以上的版本更新了API,导致Grafana的数据源插件不兼容。 解决方案 更新到最新的Grafana 和 grafana-zabbix 插件即可。&#x…...

Spring Boot与Apache Kafka的深度集成
Spring Boot与Apache Kafka的深度集成 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天我们将探讨如何在Spring Boot应用中实现与Apache Kafka的深度集成&am…...

企业AI成本为什么总是失控?Token计量与费用归因体系设计
一、问题背景随着企业大规模接入大模型能力,一个普遍现象正在浮现:AI成本正在失控。月初预算批了10万,月底账单来了20万。问财务:钱花哪了?财务说:只知道总额,不知道细节。问IT:哪个…...

用emWin定时器在STM32上做个简易秒表:从对话框UI到后台逻辑的完整实现
用emWin定时器在STM32上实现高精度秒表:从UI设计到多任务协同的工程实践 在嵌入式GUI开发中,精确的时间控制往往决定着用户体验的成败。当我们需要在STM32平台上实现一个毫秒级响应的秒表应用时,emWin的窗口管理器定时器(WM_TIMER)便成为连接…...

不只是显示中文:用fbterm给你的CentOS终端换个‘皮肤’,提升老旧服务器运维效率
终端美学革命:用fbterm打造高效CentOS字符界面工作环境 在服务器运维的世界里,图形界面往往被视为奢侈品。当您面对一台资源受限的老旧CentOS服务器,或者需要远程管理没有X11支持的机器时,字符界面就成了唯一的选择。但单调的终端…...

通过稳定的路由与容灾机制保障关键业务中的AI服务连续性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过稳定的路由与容灾机制保障关键业务中的AI服务连续性 在将大模型能力集成到关键业务流程时,服务的连续性与可靠性是…...

3分钟搞定!VideoDownloadHelper视频下载插件终极安装使用指南
3分钟搞定!VideoDownloadHelper视频下载插件终极安装使用指南 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 还在为无法保存网页…...

亚马逊Sidewalk技术解析:智能家居网络共享的隐私与安全挑战
1. 项目概述:当你的智能音箱开始“共享”你的网络 去年年底,我像往常一样检查家里的智能设备,一个偶然的发现让我停下了手里的咖啡:我家的几台亚马逊Echo智能音箱,在未经我明确同意的情况下,已经被默认开启…...

learn claude code S11 自主 Agent 详解笔记
S11 自主 Agent 详解笔记基于 s11_autonomous_agents.py 源码逐行分析,配合 s11-autonomous-agents.md 设计思路。一、问题:队友需要有人持续指派任务 s09-s10 的 teammate 有一个尴尬的空白期:完成当前任务后进入 idle,然后呢&am…...

职慧AI陪练产品全景解析:六大训练模式如何覆盖销售培养全场景
摘要:市面上的AI陪练产品大多只能做"话术对练",真正能覆盖销售能力培养全链路的产品长什么样?本文深度拆解职行力职慧AI陪练的六大训练模式——话术陪练、情景对话、智能考试、微课学习、AI专家问答、训练官带教,以及背…...

深度清理工具openclaw-uninstaller:跨平台卸载与Node.js生态清理指南
1. 项目概述:为什么我们需要一个专门的卸载工具?在软件开发和日常使用中,卸载一个应用程序听起来像是一个简单的“删除”操作,但实际情况往往复杂得多。尤其是那些功能强大、深度集成到系统中的工具,比如涉及3D重建、A…...

半导体诊断技术:从扫描逻辑到根因解卷积
1. 半导体诊断技术演进与挑战 在半导体制造领域,诊断技术始终扮演着至关重要的角色。想象一下,当芯片在测试阶段出现故障时,工程师们就像医生面对病患一样,需要通过一系列"检查手段"来定位问题根源。扫描逻辑诊断&#…...