【python】OpenCV—Color Correction

文章目录
- cv2.aruco 介绍
- imutils.perspective.four_point_transform 介绍
- skimage.exposure.match_histograms 介绍
- 牛刀小试
- 遇到的问题
参考学习来自 OpenCV基础(18)使用 OpenCV 和 Python 进行自动色彩校正
cv2.aruco 介绍

一、cv2.aruco模块概述
cv2.aruco 是 OpenCV 库中用于 ArUco 标记检测和识别的模块。ArUco 是一种基于 OpenCV 的二进制标记系统,用于多种计算机视觉应用,如姿态估计、相机校准、机器人导航和增强现实等。
以下是关于 cv2.aruco 的中文文档概要,按照参考文章中的信息进行整理和归纳:
一、ArUco 标记概述
ArUco 标记是带有黑色边框的二进制正方形图像,内部主体为白色,标记根据特定的编码变化。
ArUco 标记由 ArUco 字典、标记大小和标记 ID 组成。例如,一个 4x4_100 字典由 100 个标记组成,4x4 标记大小意味着标记由 25 位组成,每个标记将有一个唯一的 ID。
二、主要函数与参数
(1)cv2.aruco.detectMarkers()
- 功能:检测图像中的 ArUco 标记。
- 参数:
- 输入图像:包含 ArUco 标记的图像。
- 字典:用于搜索的 ArUco 字典。
- 参数(可选):检测参数,如 cv2.aruco.DetectorParameters()。
- 返回值:
- 标记角:检测到的标记的四个角的位置坐标。
- 标记 ID:检测到的标记的 ID。
- 拒绝标记(可选):未满足检测条件的标记信息。
(2)cv2.aruco.drawDetectedMarkers()
-
功能:在图像上绘制检测到的 ArUco 标记。
-
参数:
- 输入图像:包含 ArUco 标记的图像。
- 标记角:检测到的标记的四个角的位置坐标。
- 边界颜色(可选):绘制标记边界的颜色。
-
返回值:绘制了标记的图像。
(3)cv2.aruco.getPredefinedDictionary()
-
功能:获取预定义的 ArUco 字典。
-
参数:字典类型(如 aruco.DICT_ARUCO_ORIGINAL)。
-
返回值:预定义的 ArUco 字典。
三、检测过程与参数调整
阈值化:检测的第一步是对输入图像进行阈值化。这可以通过调整 cv2.aruco.DetectorParameters() 中的相关参数来完成,如 adaptiveThreshWinSizeMin、adaptiveThreshWinSizeMax 和 adaptiveThreshWinSizeStep。
角点细化:为了提高角点检测的精度,可以使用 cornerRefinementMethod 和 cornerRefinementWinSize 参数进行角点细化。
四、使用示例
以下是一个简单的示例,演示了如何使用 cv2.aruco 检测和可视化 ArUco 标记:
import cv2
import cv2.aruco as aruco # 读取图片
img = cv2.imread("marker.jpg") # 创建字典
dictionary = aruco.getPredefinedDictionary(aruco.DICT_ARUCO_ORIGINAL) # 检测标记
corners, ids, _ = aruco.detectMarkers(img, dictionary) # 可视化标记
img_with_markers = aruco.drawDetectedMarkers(img, corners) # 显示结果
cv2.imshow("ArUco detection", img_with_markers)
cv2.waitKey(0)
cv2.destroyAllWindows()
五、注意事项
-
确保已正确安装 OpenCV,并包含 cv2.aruco 模块。
-
根据具体应用需求选择合适的 ArUco 字典和标记大小。
-
调整检测参数以优化标记检测性能。
imutils.perspective.four_point_transform 介绍
使用前先安装 pip install imutils
imutils.perspective.four_point_transform 是 OpenCV 图像处理库的一个辅助工具,用于实现透视变换(Perspective Transformation)。透视变换可以将一个图像从一个视角转换到另一个视角,这在图像校正、文档扫描、车牌识别等任务中非常有用。
以下是关于 imutils.perspective.four_point_transform 函数的详细解释和用法:
一、函数定义
imutils.perspective.four_point_transform 函数需要两个主要参数:
-
image:要进行透视变换的原始图像。
-
pts:包含图像中感兴趣区域(ROI)四个顶点的坐标列表。这四个点定义了原始图像中的一个四边形区域,该区域将被变换成一个矩形区域。
二、使用步骤
a. 读取图像
首先,使用 OpenCV 的 cv2.imread() 函数读取要进行透视变换的图像。
b. 确定变换点
然后,需要确定要进行透视变换的 ROI 的四个顶点。这可以通过各种方法实现,如边缘检测、轮廓查找、角点检测等。
c. 调用 four_point_transform 函数
将原始图像和四个顶点的坐标列表传递给 imutils.perspective.four_point_transform 函数。函数将返回一个经过透视变换后的新图像。
d. 显示或保存变换后的图像
使用 OpenCV 的 cv2.imshow() 函数显示变换后的图像,或者使用 cv2.imwrite() 函数将其保存为文件。
三、示例代码
以下是一个简单的示例代码,展示了如何使用 imutils.perspective.four_point_transform 函数进行透视变换:
import cv2
import numpy as np
import imutils # 读取图像
image = cv2.imread('input.jpg') # 假设我们已经通过某种方法找到了 ROI 的四个顶点,这里我们直接给出坐标
pts = np.array([[100, 100], [300, 100], [300, 300], [100, 300]], dtype="float32") # 进行透视变换
warped = imutils.perspective.four_point_transform(image, pts) # 显示变换后的图像
cv2.imshow("Warped", warped)
cv2.waitKey(0)
cv2.destroyAllWindows()
四、注意事项
-
确保 pts 列表中的坐标点按照正确的顺序排列(通常是左上角、右上角、右下角、左下角)。
-
透视变换的结果可能会受到原始图像中 ROI 的形状和大小的影响。因此,在实际应用中,可能需要通过调整 ROI 的位置和大小来优化变换结果。
skimage.exposure.match_histograms 介绍

可参考 【python】OpenCV—Histogram Matching(9.2)
牛刀小试
素材来自于
链接:https://pan.baidu.com/s/1ja5RZUiV5Hyu-Z65JEJWzg
提取码:123a
# -----------------------------
# USAGE
# -----------------------------
# python color_correction.py
# -----------------------------
# IMPORTS
# -----------------------------
# Import the necessary packages
from imutils.perspective import four_point_transform
from skimage import exposure
import numpy as np
import argparse
import imutils
import cv2
import sys# -----------------------------
# FUNCTIONS
# -----------------------------
def find_color_card(image, colors, savename=None):# Load the ArUCo dictionary, grab the ArUCo parameters and detect the markers in the input imagearucoDict = cv2.aruco.Dictionary_get(cv2.aruco.DICT_ARUCO_ORIGINAL)arucoParams = cv2.aruco.DetectorParameters_create()(corners, ids, rejected) = cv2.aruco.detectMarkers(image, arucoDict, parameters=arucoParams)# Plot cornersif savename:image_copy = image.copy()for i in range(len(corners)): # traverse cornersfor j in range(4): # traverse coordinatescv2.circle(image_copy, center=(int(corners[i][0][j][0]), int(corners[i][0][j][1])),radius=10, color=colors[i], thickness=-1)cv2.imwrite(savename, image_copy)# Try to extract the coordinates of the color correction cardtry:# Otherwise, this means that the four ArUCo markers have been found and# so continue by flattening the ArUCo IDs listids = ids.flatten()# Extract the top-left markeri = np.squeeze(np.where(ids == 923)) # 3topLeft = np.squeeze(corners[i])[0] # array([111., 123.], dtype=float32)# Extract the top-right markeri = np.squeeze(np.where(ids == 1001)) # 2topRight = np.squeeze(corners[i])[1] # array([430., 124.], dtype=float32)# Extract the bottom-right markeri = np.squeeze(np.where(ids == 241)) # 1bottomRight = np.squeeze(corners[i])[2] # array([427., 516.], dtype=float32)# Extract the bottom left markeri = np.squeeze(np.where(ids == 1007)) # 0bottomLeft = np.squeeze(corners[i])[3] # array([121., 520.], dtype=float32)# The color correction card could not be found, so gracefully returnexcept:return None# Build the list of reference points and apply a perspective transform to obtain a top-down,# birds-eye-view of the color matching cardcardCoords = np.array([topLeft, topRight, bottomRight, bottomLeft])""" for referencearray([[111., 123.],[430., 124.],[427., 516.],[121., 520.]], dtype=float32)"""card = four_point_transform(image, cardCoords)# Return the color matching card to the calling functionreturn cardif __name__ == "__main__":# colors for cornerscolors = [[0, 0, 255],[0, 125, 255],[0, 255, 255],[0, 255, 0]]# Load the reference image and input images from diskprint("[INFO] Loading images...")ref = cv2.imread("./reference.jpg") # (4032, 3024, 3)image = cv2.imread("./examples/03.jpg") # (4032, 3024, 3)# Resize the reference and input imagesref = imutils.resize(ref, width=600) # (800, 600, 3)image = imutils.resize(image, width=600) # (800, 600, 3)# Display the reference and input images to the screencv2.imshow("Reference", ref)cv2.imshow("Input", image)# Find the color matching card in each imageprint("[INFO] Finding color matching cards...")refCard = find_color_card(ref, colors, "refCardPlot.jpg") # (397, 319, 3)imageCard = find_color_card(image, colors, "imageCardPlot.jpg") # (385, 306, 3)# If the color matching card is not found in either the reference or the input image, gracefully exit the programif refCard is None or imageCard is None:print("[INFO] Could not find color matching cards in both images! Exiting...")sys.exit(0)# Show the color matching card in the reference image and the in the input image respectivelycv2.imshow("Reference Color Card", refCard)cv2.imshow("Input Color Card", imageCard)# cv2.imwrite("reference_color_card.jpg", refCard)# cv2.imwrite("input_color_card.jpg", imageCard)# Apply histogram matching from the color matching card in the reference image# to the color matching card in the input imageprint("[INFO] Matching images...")# imageCard = exposure.match_histograms(imageCard, refCard, multichannel=True)imageCard = exposure.match_histograms(imageCard, refCard, channel_axis=-1)# Show the input color matching card after histogram matchingcv2.imshow("Input Color Card After Matching", imageCard)# cv2.imwrite("input_color_card_after_matching.jpg", imageCard)cv2.waitKey(0)
reference.jpg

03.jpg

refCardPlot.jpg

reference 的 corners
(array([[[120., 486.],[155., 485.],[156., 519.],[121., 520.]]], dtype=float32),
array([[[393., 482.],[427., 482.],[427., 516.],[393., 516.]]], dtype=float32),
array([[[395., 124.],[430., 124.],[430., 161.],[395., 161.]]], dtype=float32),
array([[[111., 123.],[147., 124.],[148., 160.],[111., 160.]]], dtype=float32))
reference 的 ids
array([[1007],[ 241],[1001],[ 923]], dtype=int32)
reference 的 rejected
len(rejected)
76
1007 左下角,红色
241 右下角,橙色
1001 右上角,黄色
923 右下角,绿色
imageCardPlot.jpg

透视变换 four_point_transform 后
reference_color_card.jpg

input_color_card.jpg

input_color_card_after_matching.jpg

遇到的问题
问题1:AttributeError: module ‘cv2.aruco’ has no attribute ‘Dictionary_get’
解决办法:pip install opencv-contrib-python==4.6.0.66
问题2:TypeError: rescale() got an unexpected keyword argument ‘multichannel‘
解决方法:将multichannel=True改成channel_axis=-1
相关文章:
【python】OpenCV—Color Correction
文章目录 cv2.aruco 介绍imutils.perspective.four_point_transform 介绍skimage.exposure.match_histograms 介绍牛刀小试遇到的问题 参考学习来自 OpenCV基础(18)使用 OpenCV 和 Python 进行自动色彩校正 cv2.aruco 介绍 一、cv2.aruco模块概述 cv2.…...
Java基础知识整理笔记
目录 1.关于Java概念 1.1 谈谈对Java的理解? 1.2 Java的基础数据类型? 1.3 关于面向对象的设计理解 1.3.1 面向对象的特性有哪些? 1.3.2 重写和重载的区别? 1.3.3 面向对象的设计原则是什么? 1.4 关于变量与方…...
知识图谱——Neo4j数据库实战
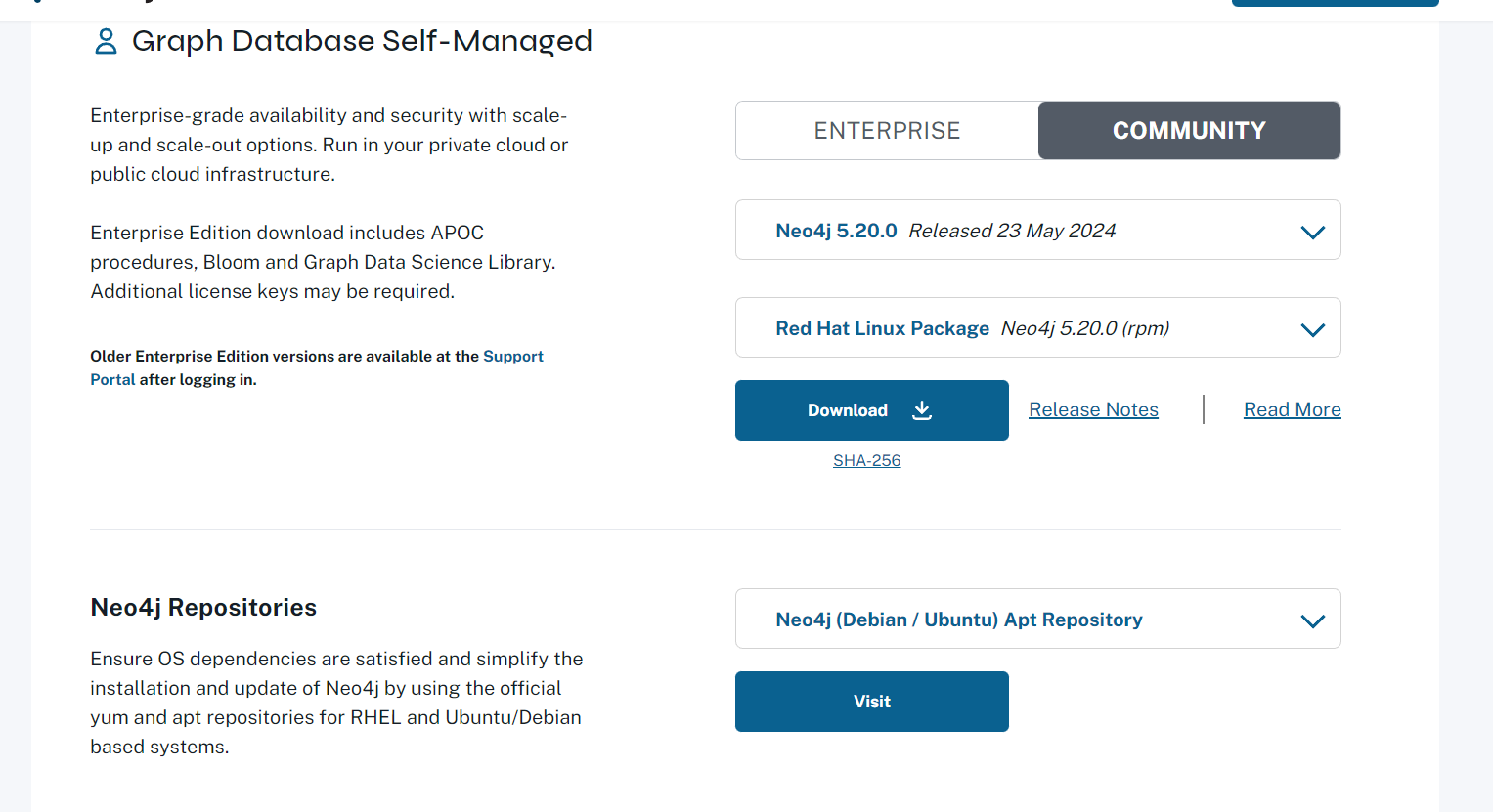
数据与代码链接见文末 1.Neo4j数据库安装 JDK 安装:https://www.oracle.com/java/technologies/javase-downloads.html Neo4j 安装:https://neo4j.com/download-center/ 配置好 JDK 和 Neo4j 的环境变量...

第十一次Javaweb作业
4.登录校验 4.1会话 --用户打开浏览器,访问web服务器的资源,会话建立,直到有一方断开连接,会话结束。在一次会话中可以包含多次请求和响应。 会话跟踪:一种维护浏览器状态的方法,服务器需要识别多次请求…...

人工智能AI风口已开:如何赋予UI设计与视频剪辑新生命
随着科技的浪潮不断向前推进,人工智能(AI)正以惊人的速度重塑着我们的世界,特别是在创意产业的核心领域——UI设计与视频剪辑中,AI正逐步成为驱动行业创新与变革的关键力量。在这个AI技术全面开花的新时代,…...

计算机专业课面试常见问题-编程语言篇
目录 1. 程序的编译执行流程? 2. C浅拷贝和深拷贝的区别? 3. C虚函数? …...
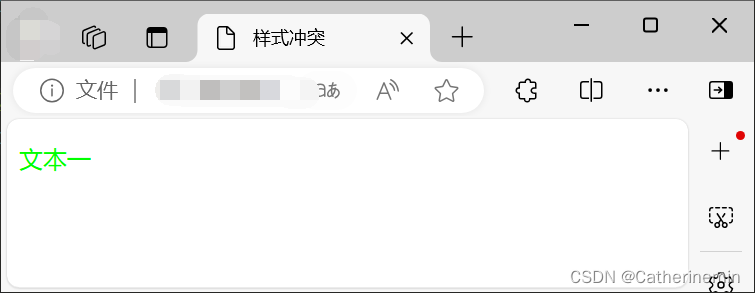
CSS|05 继承性与优先级
继承性 一、继承性的特点: 1.外层元素身上的样式会被内层元素所继承 2.如果内层元素与外层元素身上的演示相同时,外层元素的样式会被内层元素所覆盖 二、关于继承性的问题 是不是所有样式都能被继承? 答:并不是所有样式能被继承…...

KVM性能优化之内存优化(宿主机)
linux系统自带了一技术叫透明巨型页(transparent huge page),它允许所有的空余内存被用作缓存以提高性能,而且这个设置是默认开启的,我们不需要手动去操作。 Centos下,我们用cat /sys/kernel/mm/transpare…...
【Linux杂货铺】Linux学习之路:期末总结篇1
第一章 什么是Linux? Linux 是 UNIX 操作系统的一个克隆;它由林纳斯 本纳第克特 托瓦兹从零开始编写,并在网络上众多松散的黑客团队的帮助下得以发展和完善;它遵从可移植操作系统接口(POSIX)标准和单一 UNIX 规范…...

GPT-5的到来:智能飞跃与未来畅想
IT之家6月22日消息,在美国达特茅斯工程学院的采访中,OpenAI首席技术官米拉穆拉蒂确认了GPT-5的发布计划,预计将在一年半后推出。穆拉蒂形象地将GPT-4到GPT-5的飞跃比作高中生到博士生的成长。这一飞跃将给我们带来哪些变化?GPT-5的…...
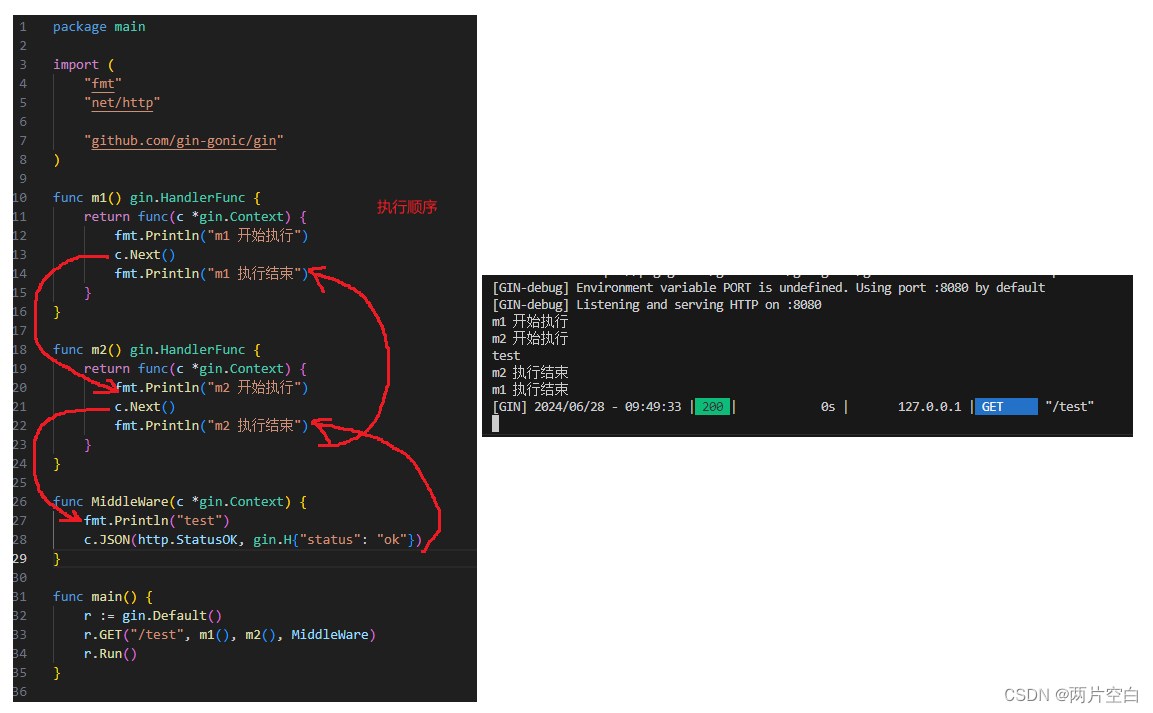
gin中间件
在web应用服务中,完整的业务处理在技术上包含客户端操作,服务端处理,返回处理结果给客户端三个步骤。但是在在更负责的业务和需求场景。一个完整的系统可能要包含鉴权认证,权限管理,安全检查,日志记录等多维…...

swagger常用注解
最近查看接口文档的时候发现,POST方法中的query没法在swagger中显示,查了才发现这是因为Swagger或OpenAPI规范默认将HTTP POST请求的参数识别为请求体(body)参数,而不是查询字符串(query)参数。…...
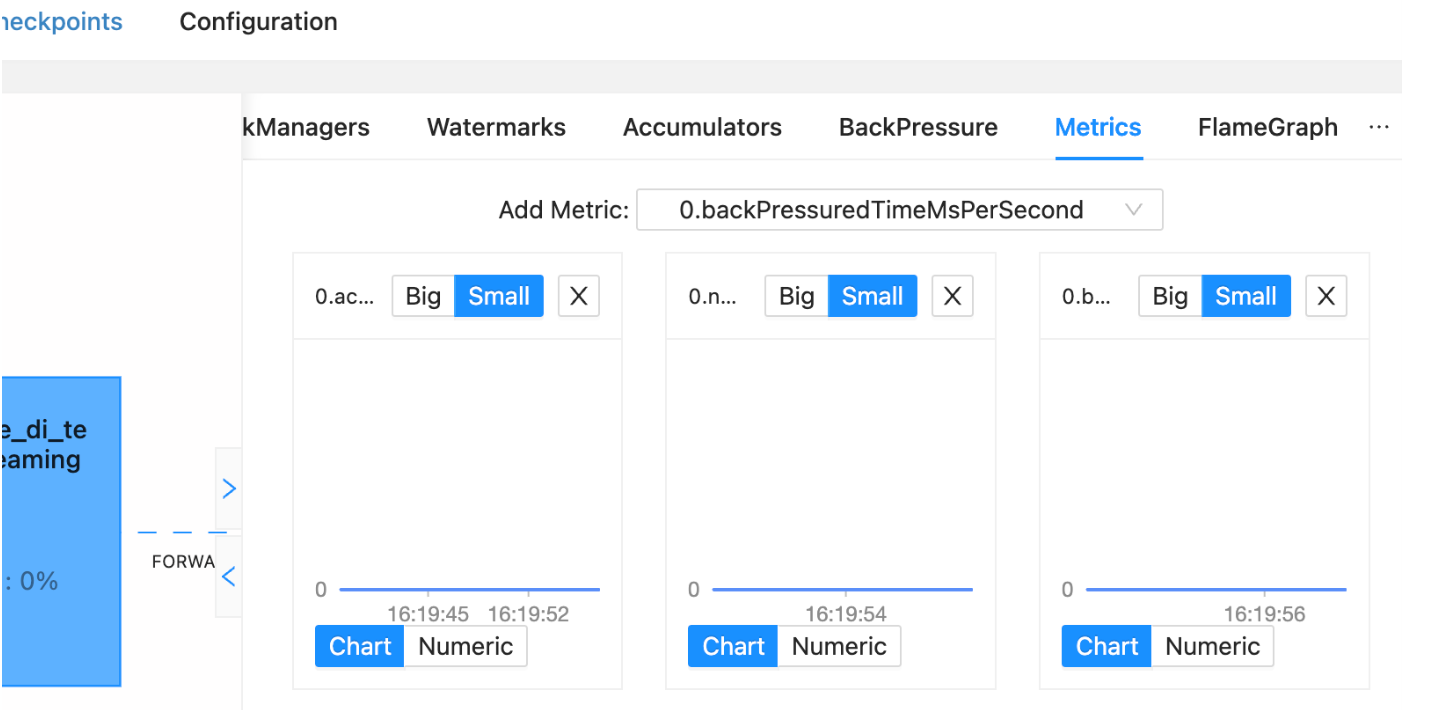
【Flink metric(1)】Flink指标系统的系统性知识:获取metric以及注册自己的metric
文章目录 一. Registering metrics:向flink注册新自己的metrics1. 注册metrics2. Metric types:指标类型2.1. Counter2.2. Gauge2.3. Histogram(ing)2.4. Meter 二. Scope:指标作用域1. User Scope2. System Scope ing3. User Variables 三. Reporter ing四. System…...
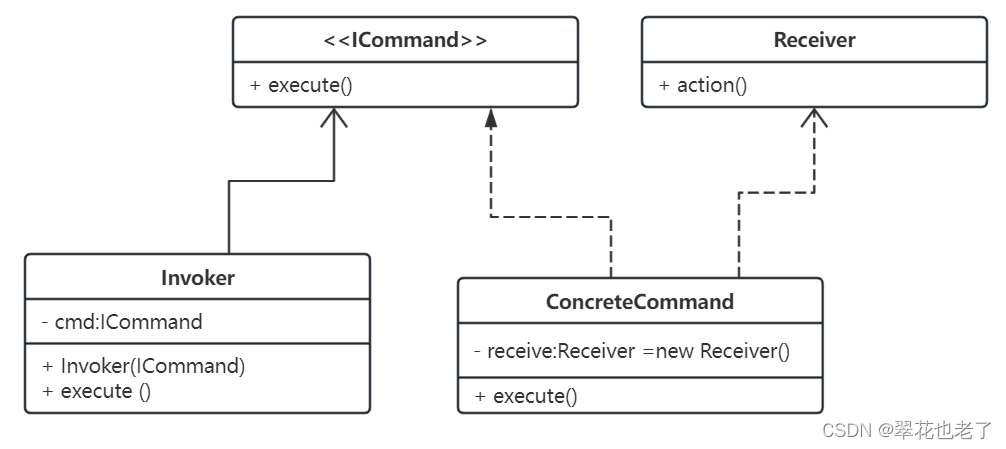
命令模式(Command Pattern)
命令模式(Command Pattern) 定义 命令模式是对命令的封装,每一个命令都是一个操作:请求的一方发出请求要求执行一个操作;接收的一方收到请求,并执行操作。 命令模式解耦了请求方和接收方,请求…...

掌握Symfony的模板继承:构建强大且灵活的Web界面
掌握Symfony的模板继承:构建强大且灵活的Web界面 在Symfony框架中,模板继承是一个强大的功能,它允许开发者创建可重用的布局模板,并通过扩展这些模板来构建具体的页面。这种机制不仅提高了代码的可维护性,还使得页面结…...

uboot基本使用网络命令和从服务器端下载linux内核启动
网络命令ip地址设置: setenv gmac_debug 0; setenv mdio_intf rgmii; setenv bootdelay 1; setenv ethaddr 00:xxxx:81:70; // mac地址 setenv ipaddr xxx; //开发板 IP 地址 setenv netmask 255.255.255.0; setenv gatewayip xxx.1; setenv serverip xxxx; //服…...
解决ArcGIS导出的svg格式的图片插入Word后的字体问题
背景 在ArcGIS中设置字体为Times New Roman,但导入Word后字体转为等线。 ArcGIS中的Layout 导入Word 原因分析 Word无法识别嵌入进SVG格式文件中的字体。 解决方案 在Export Layer窗口中,将Embed fonts取消勾选,Convert cha…...

如何确保 Puppet 配置在复杂网络环境中的可靠分发和同步?
在复杂网络环境中确保 Puppet 配置的可靠分发和同步可以采取以下措施: 网络拓扑规划:在复杂网络环境中,首先需要进行网络拓扑规划,确保网络结构合理,并能够支持可靠的分发和同步机制。 Puppet Master 多节点部署&…...
2024最新!将mysql的数据导入到Solr
Solr导入mysql的数据 如何安装导入数据前准备配置Solr的Jar包以及Mysql驱动包1.1、将solr-8.11.3\dist下的两个包进行移动1.2、将mysql-connect包也移动到该位置1.3、重启Solr项目 配置xml2.1、第一步我们需要创建核心2.2、第二步修改xml(这里是结合19年的教程)2.3、 创建data-…...

Python数据分析第二课:conda的基础命令
Python数据分析第二课:conda的基础命令 1.conda是什么? conda是一个开源的包管理系统,可以帮助我们进行管理多个不同版本的软件包,还可以帮助我们建立虚拟环境,以便对不同的项目进行隔离。 简单来说,conda是一个软…...

【Midjourney Tempera风格终极指南】:20年AI绘画专家亲授3大参数黄金配比与5类易踩翻车点
更多请点击: https://intelliparadigm.com 第一章:Tempera风格的本质解构与历史溯源 Tempera(蛋彩画)作为一种古老而精密的绘画媒介,其技术逻辑与现代前端渲染范式存在深层隐喻关联——尤其在“分层合成”“介质绑定”…...

准备转型AI产品经理的朋友,建议看看这本书
本文从《AI即未来:普通人用好人工智能的18大工作场景》出发,深入探讨了AI大模型的选择、部署及评估。文章指出,面对众多AI工具,应根据任务需求、输出质量、成本等因素进行选择,并强调AI更像助手,需人类监督…...

SRWE:Windows窗口实时编辑器的专业应用指南
SRWE:Windows窗口实时编辑器的专业应用指南 【免费下载链接】SRWE Simple Runtime Window Editor 项目地址: https://gitcode.com/gh_mirrors/sr/SRWE 在数字内容创作和游戏开发领域,分辨率限制常常成为技术瓶颈。传统Windows窗口管理系统缺乏灵活…...

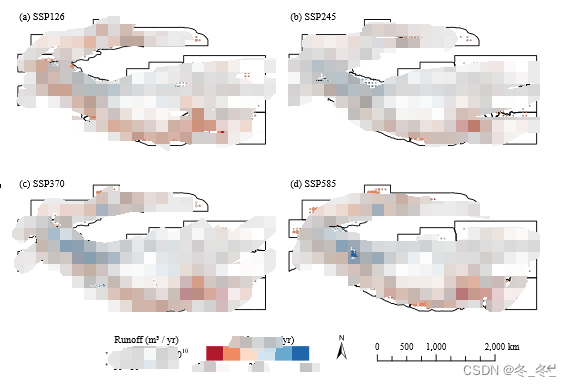
感应照明技术:从工业到家用,一场技术降维的工程冒险
1. 项目概述:当感应照明技术走进寻常百姓家最近在整理一些老旧的行业资料时,翻到了2014年的一则新闻,讲的是当时一家初创公司“Finally Light Bulb Company”宣布要推出一款售价低于10美元的感应灯泡,用来替代传统的白炽灯。这让我…...

Flexpilot AI:开源可定制的VS Code AI编程助手配置与实战指南
1. 项目概述与核心价值作为一名在开发工具领域摸爬滚打了十多年的老码农,我见证过无数个“下一代编辑器”和“智能助手”的兴衰。当GitHub Copilot横空出世,确实改变了游戏规则,但随之而来的,是开发者们被锁定在单一服务商、高昂的…...

FastAPI清洁架构实践:从分层设计到可维护项目搭建
1. 项目概述:一个为FastAPI项目设立的“洁净室”当你开始一个新的FastAPI项目时,面对的是一个空白的画布。理论上,你可以自由地绘制任何架构,但现实往往是:随着第一个路由、第一个数据库模型、第一个业务逻辑的加入&am…...

【Linux保姆级教程】curl命令最全用法详解
在Linux日常运维、后端开发、接口调试工作中,有一个命令几乎无人不知、无人不用,它就是curl命令。curl被称为网络传输瑞士军刀,无需打开浏览器,纯命令行即可发送网络请求,支持HTTP/HTTPS/FTP等数十种协议。不管是测试接…...

基于MCP协议构建AI知识库:解决会话失忆,实现知识持久化
1. 项目概述:让AI拥有自己的“亚历山大图书馆”如果你和我一样,长期与Claude Code、Cursor这类AI编程助手打交道,一定会遇到一个核心痛点:会话失忆。每次开启一个新对话,AI助手就像一张白纸,它对你项目的历…...

基于T4技术栈的现代全栈应用开发实践与最佳实践解析
1. 项目概述:一个现代全栈应用的原型与起点最近在GitHub上看到一个挺有意思的项目,叫timothymiller/t4-app。乍一看这个名字,可能有点摸不着头脑,但点进去你会发现,这其实是一个精心设计的全栈Web应用模板。它不是某个…...

开源机械爪智能增强:计算机视觉与运动规划赋予抓取超能力
1. 项目概述:当“机械爪”遇上“超能力”如果你玩过抓娃娃机,或者关注过工业自动化,对机械爪(Claw)这个概念一定不陌生。它的核心任务简单直接:识别、定位、抓取。但现实往往骨感——面对形状不规则、材质光…...