(13)DroneCAN 适配器节点(二)
文章目录
前言
2 固件
2.1 基于F103
2.2 基于F303
2.3 基于F431
3 ArduPilot固件DroneCAN设置
3.1 f303-通用设置示例
4 DroneCAN适配器节点
前言
这些节点允许现有的 ArduPilot 支持的外围设备作为 DroneCAN 或 MSP 设备适应 CAN 总线。这也允许扩展自动驾驶仪硬件的功能。如允许 I2C 设备(如罗盘或空速)距离自动驾驶仪 1m 以上,并实现多达 32 个伺服输出通道。
2 固件
AP_Periph 文件夹中提供了支持 DroneCAN 设备的固件(Firmware),以及将一些自动驾驶仪转换为 DroneCAN 适配器使用。目前,以下固件是预制的,但代码允许轻松定制。当设备连接到自动驾驶仪上的DroneCAN端口且自动驾驶仪启用该端口时,可以使用DroneCAN GUI或MissionPlanner SLCAN安装固件。请参阅 DroneCAN 设置(DroneCAN Setup)。由于所有ArduPilot 驱动库的大小将超过较小的处理器,因此提供了几个变体,支持不同的外围设备。
2.1 基于F103
- f103-GPS:串行 GPS,I2C 指南针,I2C RGB LED;
- f103-ADSB:串行 ADS_B,I2C 罗盘,I2C 空速计;
- f103-Rangefinder:串行测距仪,I2C 空速计。
2.2 基于F303
- f303-GPS:串行 GPS,SPI RM3100 指南针,I2C 指南针,I2C RGB LED;
- f303-M10025:串行 GPS,SPI RM3100 指南针,SPI DPS310 Baro,I2C RGB LED,I2C 空速计,安全开关;
- f303-Universal:串行 GPS /测距仪/ ADS-B,I2C 指南针,I2C Baro,I2C RGB LED,I2C 空速计。
2.3 基于F431
- MatekL431-Periph:串行 GPS,I2C QMC5883L 指南针,I2C SPL06 Baro,I2C RGB LED,I2C 空速计(MS4525 默认),无源蜂鸣器,电池监控器,MSP,5 个 PWM 输出(建议在此应用中使用 MatekL431-DShot);
- MatekL431-Airspeed:I2C 空速计,DLVR 10" 默认类型;
- MatekL431-DShot:5 个双向 DShot(默认)/ PWM 输出,默认从 SERVO5 开始,ESC 遥测在 UART1 RX 上(见这里的设置说明)(setup instructions here);
- MatekL431-测距仪:串行测距仪。
3 ArduPilot固件DroneCAN设置
!Note
请确保启用自动驾驶仪的 CAN 端口,并将其设置为 DroneCAN 协议。参见:DroneCAN 设置(DroneCAN Setup)。
DroneCAN 适配器可以支持各种设备和配置。通常情况下,它的配置参数需要被改变。为了实现这一目的,可以使用 DroneCAN GUI 或 MissionPlanner SLCAN 来改变设备的参数。
例如,当使用 MatekL431-Airspeed 时,你可能需要改变设备中的 ARSPD_TYPE 参数,以匹配你使用的实际 I2C 空速传感器。
3.1 f303-通用设置示例
f303-Universal 固件有能力用于多个串行设备,但只能启用一个设备来使用单个 UART。一旦固件被上传,连接到 UART 端口的默认设备被设置为 GPS,要使用另一个设备如测距仪,必须关闭GPS,启用测距仪或其他设备。
串行设备的选项是:
- GPS_TYPE = 0;
- RNGFND1_TYPE = 0;
- ADSB_BAUDRATE = 0。
上述适配器 DroneCAN 的参数设置会禁用所有的设备,那么你应该只启用你想要的那个,要知道你不可能有两个串行设备,因为只有一个 UART。
该固件也可用于 I2C 外围设备。
- COMPASS;
- BARO;
- AIRSPEED SENSOR;
- NCP5623 LED。
4 DroneCAN适配器节点
有几个设备是专门为作为通用适配器节点使用而制造的:
- ARK CANnode
- MatekL431 DroneCAN Adapter Node
- mRo DroneCAN Adapter Node
相关文章:
DroneCAN 适配器节点(二))
(13)DroneCAN 适配器节点(二)
文章目录 前言 2 固件 2.1 基于F103 2.2 基于F303 2.3 基于F431 3 ArduPilot固件DroneCAN设置 3.1 f303-通用设置示例 4 DroneCAN适配器节点 前言 这些节点允许现有的 ArduPilot 支持的外围设备作为 DroneCAN 或 MSP 设备适应 CAN 总线。这也允许扩展自动驾驶仪硬件的…...
摸鱼大数据——Spark基础——Spark环境安装——Spark Local[*]搭建
一、虚拟机配置 查看每一台的虚拟机的IP地址和网关地址 查看路径: cat /etc/sysconfig/network-scripts/ifcfg-ens33 2.修改 VMware的网络地址: 使用VMnet8 3.修改windows的对应VMware的网卡地址 4.通过finalshell 或者其他的shell连接工具即可连接使用即可, 连接后, 测试一…...
)
函数内部结构分层浅析(从MVC分层架构联想)
函数内部结构分层浅析(从MVC分层架构联想) 分层架构:一种将软件代码按不同功能进行划分的架构模式。 优点包括: 可维护性:各层职责明确,易于单独修改维护。 可扩展性:方便添加或修改某一层,不…...
【three.js案例二】时空隧道
import * as THREE from ./build/three.module.js // 引入轨道控制器扩展库OrbitControls.js import { OrbitControls } from three/addons/controls/OrbitControls.js; // 引入dat.gui.js的一个类GUI import { GUI } from three/addons/libs/lil-gui.module.min.js;// 场景 co…...

动手学深度学习(Pytorch版)代码实践 -计算机视觉-48全连接卷积神经网络(FCN)
48全连接卷积神经网络(FCN) 1.构造函数 import torch import torchvision from torch import nn from torch.nn import functional as F import matplotlib.pyplot as plt import liliPytorch as lp from d2l import torch as d2l# 构造模型 pretrained…...

【Python游戏】猫和老鼠
本文收录于 《一起学Python趣味编程》专栏,从零基础开始,分享一些Python编程知识,欢迎关注,谢谢! 文章目录 一、前言二、代码示例三、知识点梳理四、总结一、前言 本文介绍如何使用Python的海龟画图工具turtle,开发猫和老鼠游戏。 什么是Python? Python是由荷兰人吉多范…...

【无标题】c# WEBAPI 读写表到Redis
//c# WEBAPI 读写表到Redis using System; using System.Collections.Generic; using System.Linq; using System.Net; using System.Net.Http; using System.Web.Http; using Newtonsoft.Json; using StackExchange.Redis; using System.Data; using System.Web; namespace …...
)
【剑指Offer系列】53-0到n中缺失的数字(index)
给定一个包含 [0, n] 中 n 个数的数组 nums ,找出 [0, n] 这个范围内没有出现在数组中的那个数。 示例 1: 输入:nums [3,0,1] 输出:2 解释:n 3,因为有 3 个数字,所以所有的数字都在范围 [0,3]…...

docker compose部署zabbix7.0官方方法快速搭建
环境介绍: 系统:centos7 官方文档:https://www.zabbix.com/documentation/current/zh/manual/installation/containers docker镜像加速 vi /etc/docker/daemon.json{"registry-mirrors": ["https://docker.1panel.live&quo…...
?)
分库分表之后如何设计主键ID(分布式ID)?
文章目录 1、数据库的自增序列步长方案2、分表键结合自增序列3、UUID4、雪花算法5、redis的incr方案总结 在进行数据库的分库分表操作后,必然要面临的一个问题就是主键id如何生成,一定是需要一个全局的id来支持,所以分库分表之后,…...
秋招突击——6/28、6.29——复习{数位DP——度的数量}——新作{}
文章目录 引言复习数位DP——度的数量个人实现参考实现 总结 引言 头一次产生了那么强烈的动摇,对于未来没有任何的感觉的,不知道将会往哪里走,不知道怎么办。可能还是因为实习吧,再加上最近复习也没有什么进展,并不知…...

Spring Boot中使用Thymeleaf进行页面渲染
Spring Boot中使用Thymeleaf进行页面渲染 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天我们将探讨如何在Spring Boot应用中使用Thymeleaf模板引擎进行页面…...

恢复策略(下)-事务故障后的数据库恢复、系统故障后的数据库恢复(检查点技术)、介质故障后的数据库恢复
一、数据库恢复-事务故障 系统通过对事物进行UNDO操作和REDO操作可实现故障后的数据库状态恢复 1、对于发生事务故障后的数据库恢复 恢复机制在不影响其他事务运行的情况下,强行回滚夭折事务,对该事务进行UNDO操作,来撤销该事务已对数据库…...

如何知道docker谁占用的显卡的显存?
文章目录 python环境安装nvidia-htop查看pid加一个追踪总结一下【找到容器创建时间】使用说明示例 再总结一下【用PID找到容器创建时间,从而找到谁创建的】使用说明示例 python环境安装nvidia-htop nvidia-htop是一个看详细的工具。 pip3 install nvidia-htop查看…...
wps linux node.js 加载项开发,和离线部署方案
环境准备 windwos 安装node.js 安装VSCode 安装wps linux 安装node.js 安装VSCode 安装wps 通过npm 安装wpsjs SDK 使用npm安装wpsjs npm install -g wpsjs 创建一个项目 wpsjs create WPS-Addin-PPT 创建项目会让你选择2个东西: 1:选择你的文…...
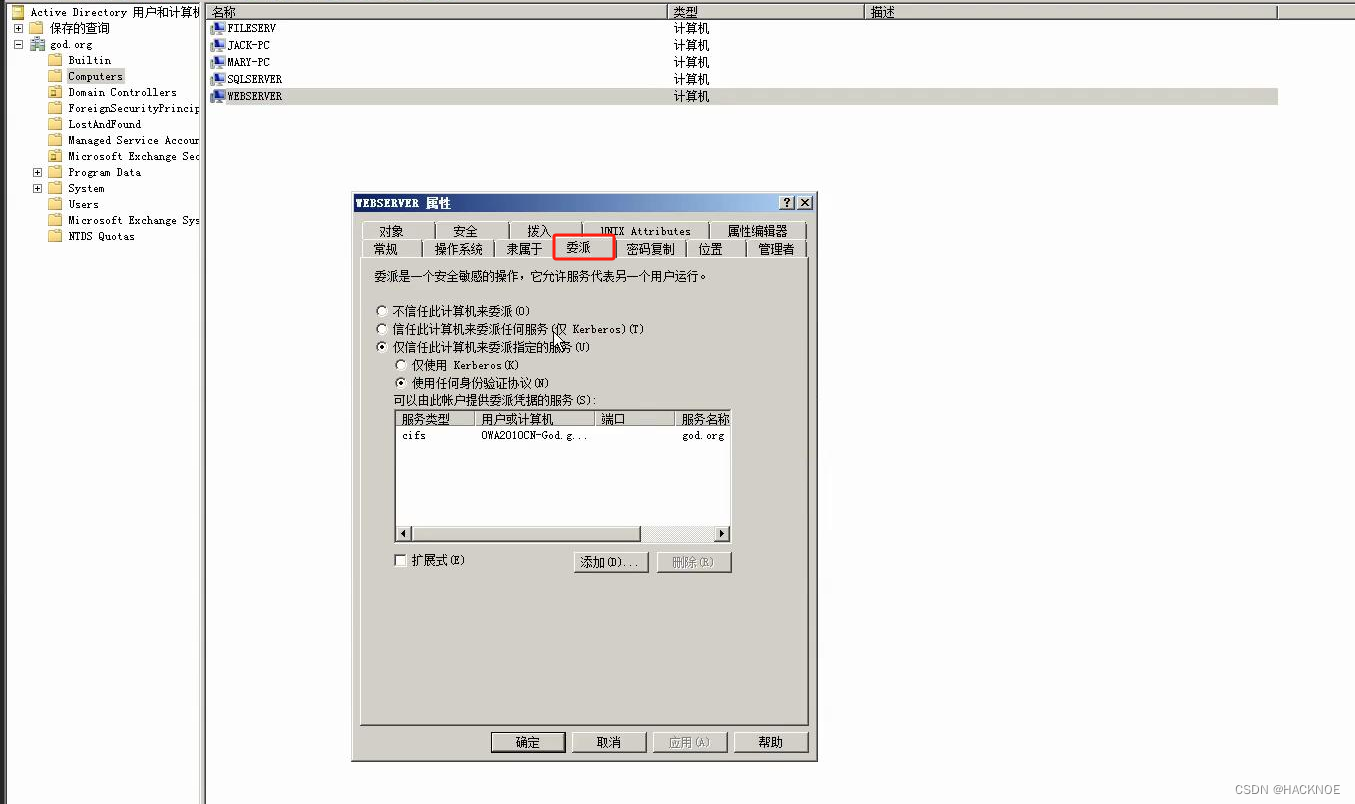
红队内网攻防渗透:内网渗透之内网对抗:横向移动篇Kerberos委派安全非约束系约束系RBCD资源系Spooler利用
红队内网攻防渗透 1. 内网横向移动1.1 委派安全知识点1.1.1 域委派分类1.1.2 非约束委派1.1.2.1 利用场景1.1.2.2 复现配置:1.1.2.3 利用思路1:诱使域管理员访问机器1.1.2.3.1 利用过程:主动通讯1.1.2.3.2 利用过程:钓鱼1.1.2.4 利用思路2:强制结合打印机漏洞1.1.2.5 利用…...

nginx上传文件限制
默认限制 Nginx 限制文件大小可以通过 client_max_body_size 指令来设置,该指令通常在 http、server 或 location 块中设置,如果不设置,默认上传大小为1M。 修改上传文件限制 要修改Nginx的文件上传大小限制,你需要编辑Nginx的配…...

76. 最小覆盖子串(困难)
76. 最小覆盖子串 1. 题目描述2.详细题解3.代码实现3.1 Python3.2 Java 1. 题目描述 题目中转:76. 最小覆盖子串 2.详细题解 在s中寻找一个最短的子串,使之包含t中的所有字符,t中可能存在多个相同字符,寻找的子串也应至少含有…...

K8S 集群节点扩容
环境说明: 主机名IP地址CPU/内存角色K8S版本Docker版本k8s231192.168.99.2312C4Gmaster1.23.1720.10.24k8s232192.168.99.2322C4Gwoker1.23.1720.10.24k8s233(需上线)192.168.99.2332C4Gwoker1.23.1720.10.24 当现有集群中的节点资源不够用&…...

AI大模型技术在音乐创造的应用前景
大模型技术在音乐创作领域具有广阔的应用前景,可以为音乐家、作曲家和音乐爱好者提供以下方面的帮助。北京木奇移动技术有限公司,专业的软件外包开发公司,欢迎交流合作。 音乐创作辅助:大模型可以帮助音乐家和作曲家生成旋律、和声…...

ncmdumpGUI:解锁网易云音乐格式限制的智能解密工具
ncmdumpGUI:解锁网易云音乐格式限制的智能解密工具 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 在数字音乐时代,我们经常面临一个尴…...
)
STM8硬件IIC驱动BNO055传感器避坑指南(附完整代码)
STM8硬件IIC驱动BNO055传感器实战解析与优化 BNO055作为一款集成了9轴传感器融合算法的智能芯片,能够直接输出姿态角数据,极大简化了嵌入式系统中姿态解算的复杂度。然而在实际应用中,许多开发者发现使用STM32等常见MCU的模拟IIC接口难以稳定…...

全域态势数字孪生,筑牢楼宇长效安全透明防护屏障
全域态势数字孪生,筑牢楼宇长效安全透明防护屏障副标题:全要素三维动态实时复刻楼宇实景,依托无感全域人员感知、多机位跨镜联动追踪、身体指纹唯一身份归档,异常行为、区域滞留、安全隐患提前透明预警处置一、方案概述伴随城市高…...

基于RP2040与CircuitPython的键盘内嵌DOOM游戏启动器DIY指南
1. 项目概述与核心思路几年前,我还在用笨重的全尺寸键盘时,就总琢磨着怎么给这每天摸上八小时的家伙加点“私货”。直到后来玩起了RP2040和CircuitPython,一个念头就冒出来了:能不能把游戏直接“焊”进键盘里?不是那种…...

Arm Neoverse CMN-700多芯片架构与一致性哈希解析
1. Arm Neoverse CMN-700多芯片架构解析在现代高性能计算领域,多芯片系统架构已成为突破单芯片性能瓶颈的关键技术路径。Arm Neoverse CMN-700作为第二代一致性网状网络控制器,其设计哲学体现在三个维度:首先是通过模块化设计实现计算单元的可…...

OneQuery:统一异构数据源查询的抽象层设计与实战
1. 项目概述:一个查询,无限可能最近在折腾一个数据聚合项目,需要从多个异构数据源里捞数据,然后统一处理。这活儿听起来简单,但真干起来,每个数据源都有自己的查询语法、连接方式和返回格式,光是…...

会话管理封装实践:构建安全可扩展的分布式会话系统
1. 项目概述:一个被低估的会话管理利器如果你是一名开发者,尤其是经常需要处理用户登录、权限校验、状态保持这类“脏活累活”的后端或全栈开发者,那么你一定对“会话管理”这四个字又爱又恨。爱的是,它是构建安全、有状态应用的基…...

Bun用Rust重写核心代码,百万行新增代码直接把GitHub干爆了!
Bun 项目刚刚完成了一次惊人的技术跨越。5月14日,Bun 正式宣布其核心运行时已从 Zig 重写为 Rust——这个版本包含 6755 个 commit,二进制文件体积缩小 3-8 MB,性能测试在各个平台上均达到或超越原有水平。Jarred Sumner(Bun 的创…...

苍穹外卖day11
概述项目步入尾声,进行商家数据统计开发分为营业额统计,用户统计,订单统计,销量排名 导航栏的内容为查询选定时间内的的数据统计 右上角的数据导出为下一天的内容 数据导出后形成的图表由Apache的Echarts生成,是开发中…...

2026年冰袋吸水粉厂家大揭秘:选择指南与行业趋势题
随着冷链物流行业的快速发展,冰袋吸水粉作为冷链运输中不可或缺的保冷材料,其市场需求持续增长。然而,市场上冰袋吸水粉的质量参差不齐,如何选择一家值得信赖的厂家成为许多采购商关注的重点。本文将从行业背景、技术特点及市场趋…...