PIL,OpenCV,Pytorch处理图像时的通道顺序(颜色,长宽深)
| 项目 | 颜色通道顺序 | 长宽通道顺序 | 数据类型 | 取值范围 |
|---|---|---|---|---|
| PIL | RGB | HWC | ndarray | 0-255 (byte) |
| OpenCV | BGR | HWC | ndarray | 0-255 (byte) |
| PyTorch | RGB/BGR (取决于如何读取) | (N)CHW | tensor | 0-1 (float, 标准化后); 0-255 (int, 未标准化) |
注意以下几点:
-
颜色通道顺序:PIL默认使用RGB顺序,而OpenCV使用BGR顺序。PyTorch不直接指定颜色通道顺序,它取决于你如何将图像数据加载到tensor中。如果你直接从PIL或OpenCV加载图像到PyTorch tensor,那么颜色通道顺序将保持不变(除非你进行了额外的转换)。
-
长宽通道顺序:PIL和OpenCV都使用HWC(高度、宽度、通道)顺序。PyTorch在处理图像数据时,通常期望的输入是CHW(通道、高度、宽度)顺序,特别是当使用卷积神经网络等模型时。但是,PyTorch的
torchvision.transforms模块提供了ToTensor()等转换函数,可以自动将HWC顺序的PIL图像或NumPy数组转换为CHW顺序的tensor。此外,PyTorch还允许使用额外的维度N(批量大小)来扩展CHW到NCHW,这在处理批量图像时很常见。 -
数据类型:PIL和OpenCV都使用NumPy数组来存储图像数据,而PyTorch使用tensor。
-
取值范围:PIL和OpenCV中的图像数据通常以字节(byte)形式存储,取值范围为0-255。PyTorch中的tensor可以存储浮点数或整数,具体取决于你的设置。在大多数情况下,PyTorch期望输入图像的像素值被标准化到0-1的浮点数范围内,这是通过除以255来实现的。但是,如果你在处理分类任务等场景时,可能需要将图像数据保持为0-255的整数范围,并在模型中进行相应的调整。
-
(N)HWC vs. (N)CHW:我在PyTorch的“长宽通道顺序”列中添加了(N)来表示可能存在的批量大小维度。在PyTorch中,处理单个图像时通常使用CHW顺序,但在处理批量图像时,则使用NCHW顺序。然而,需要注意的是,这种约定主要适用于CUDA操作和某些特定的PyTorch层/函数(如
torch.nn.Conv2d)。在大多数情况下,当你使用torchvision.transforms将PIL图像或NumPy数组转换为tensor时,你得到的是一个CHW顺序的tensor(除非你使用了特定的转换函数来改变这个顺序)。然后,如果你需要将tensor输入到支持批量处理的模型中,你可能需要手动添加一个额外的维度(即批量大小N)来形成NCHW顺序的tensor。但是,这通常是由PyTorch的数据加载器(如torch.utils.data.DataLoader)自动完成的。
相关文章:
)
PIL,OpenCV,Pytorch处理图像时的通道顺序(颜色,长宽深)
项目颜色通道顺序长宽通道顺序数据类型取值范围PILRGBHWCndarray0-255 (byte)OpenCVBGRHWCndarray0-255 (byte)PyTorchRGB/BGR (取决于如何读取)(N)CHWtensor0-1 (float, 标准化后); 0-255 (int, 未标准化) 注意以下几点: 颜色通道顺序:PIL默认使用RGB顺…...

经纬恒润亮相2024世界智能产业博览会
近日,以“智行天下 能动未来”为主题的2024世界智能产业博览会(以下简称“智博会”)在国家会展中心(天津)成功举办。本次智博会上,经纬恒润自主研发的汽车电子产品联合天津(西青)国家…...

Python序列化和反序列化
一.序列化和反序列化 在Python中,序列化(Serialization)和反序列化(Deserialization)是处理对象数据的过程,主要用于对象的存储或网络传输。 序列化(Serialization) 序列化是将Pyth…...

Stream toArray 好过collect
toArray 比collect 更好用,这样就不需要判断Null。 if(_user.getUserRole()!null) {_user.setRole(_roleList.stream().filter(_e->_e.getRoleId()_user.getUserRole()).toArray(Role[]::new)[0]); } if(_user.getUserRole()!null) {_user.setRole(_roleList.s…...

qt/c++/mysql教务管理系统
简介 qt/c/mysql教务管理系统 学生端,教师端,管理员端 演示 qt/c/mysql教务管理系统 源码获取 printf("白嫖勿扰,需要的加v%s","ywj17347418171");...

Echarts公共方法
Vue引入Echarts install 1.安装Echartsnpm install echarts --save 2.项目全局引入形式--#main.js 全局引入形式import * as echarts from "echarts"Vue.prototype.$echarts echarts 公共方法JS /*** author: wangjie* description: 通用echarts图表封装* date: …...
)
鸿蒙学习(二)
文章目录 1、弹窗2、走马灯(实现轮播图效果)3、注解6、多选框、单选框7、Stack8、TextTimer9、DatePicker 1、弹窗 显示提示信息或者用于用户交互 导入模块 prompt 接口 showToast:显示toast showDialog:显示对话框 showContextMenu:显示上下文菜单 sh…...
企业机构营销目前106短信群发还有用吗?此文告诉你该如何抉择!
在当今竞争激烈的企业营销环境中,106短信群发平台依然是众多企业机构青睐的营销工具之一。尽管互联网技术的发展带来了多样化的沟通方式,但106短信群发凭借其直达性强、成本低廉、覆盖广泛等优势,仍然保持着不错的营销效果。然而,…...

DJYGUI AI低代码图形编程开发平台:开启嵌入式软件图形编程新纪元
在科技高速发展的当今时代,软件开发行业对创新和高效的需求日益增长。DJYGUI AI低代码图形编程开发平台的出现,为智能屏、物联屏、串口屏等嵌入式显示设备领域带来了全新的机遇。该平台由都江堰操作系统 AI 代码自动生成平台研发,具有显著的优…...
为什么不能在foreach中删除元素
文章目录 快速失败机制(fail-fast)for-each删除元素为什么报错原因分析逻辑分析 如何正确的删除元素remove 后 breakfor 循环使用 Iterator 总结 快速失败机制(fail-fast) In systems design, a fail-fast system is one which i…...
python学习-tuple及str
为什么需要元组 定义元组 元组的相关操作 元组的相关操作 - 注意事项 元组的特点 字符串 字符串的下标(索引) 同元组一样,字符串是一个:无法修改的数据容器。 如果必须要修改字符串,只能得到一个新的字符串ÿ…...
Python深度理解系列之【排序算法——冒泡排序】
读者大大们好呀!!!☀️☀️☀️ 👀期待大大的关注哦❗️❗️❗️ 🚀欢迎收看我的主页文章➡️木道寻的主页 文章目录 🔥前言🚀冒泡排序python实现算法实现图形化算法展示 ⭐️⭐️⭐️总结 🔥前…...

边界框在目标检测中的作用与应用
目标检测是计算机视觉领域的核心任务之一,旨在从图像或视频中识别和定位感兴趣的目标。边界框(Bounding Box)是目标检测中常用的一种表示方法,用于确定目标在图像中的确切位置。本文将详细探讨边界框的概念、它在目标检测中的角色…...

linux 环境报错:Peer reports incompatible or unsupported protocol version
出现问题的原因: curl 不兼容或不支持的协议版本。 解决方案: yum update -y nss curl libcurl如此继续之前的操作即可。...
深入解析:Java爬虫的本质是什么?
深入解析:Java爬虫的本质是什么? 引言: 随着互联网的快速发展,获取网络数据已成为许多应用场景中的重要需求。而爬虫作为一种自动化程序,能够模拟人类浏览器的行为,从网页中提取所需信息,成为了…...

【Matlab 六自由度机器人】机器人动力学之推导拉格朗日方程(附MATLAB机器人动力学拉格朗日方程推导代码)
【Matlab 六自由度机器人】机器人动力学概述 近期更新前言正文一、拉格朗日方程的推导1. 单自由度系统2. 单连杆机械臂系统3. 双连杆机械臂系统 二、MATLAB实例推导1. 机器人模型的建立2. 动力学代码 总结参考文献 近期更新 【汇总】 【Matlab 六自由度机器人】系列文章汇总 …...

线下生鲜蔬果店做小程序有什么方法
生鲜蔬果是生活所需,大小商家众多,零售批发各种经营模式,小摊贩或是超市门店都有着目标客户或准属性群体。竞争和获客转化也促进着商家寻找客源和加快线上进程。 尤其是以微信社交为主的私域场景,普客/会员都需要精细化管理营收和…...

几种linux开机自启脚本的方法
几种linux开机自启脚本的方法 1. 脚本添加到init.d目录中2. 创建服务service(推荐)3. /etc/profile & /etc/profile.d(不推荐)4. /etc/rc.local 本文以启动jenkins节点为例,需要持久连接,实现开机自启 …...
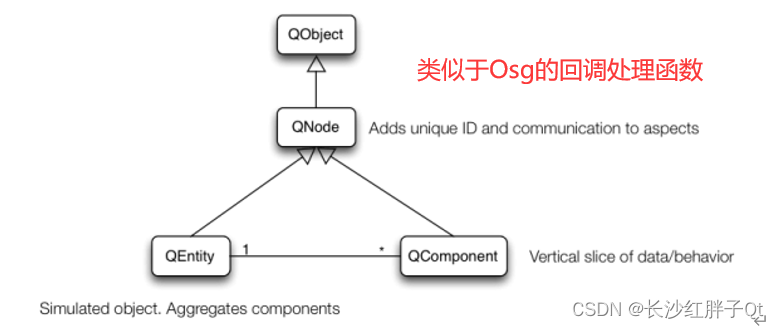
Qt开发笔记:Qt3D三维开发笔记(一):Qt3D三维开发基础概念介绍
若该文为原创文章,转载请注明原文出处 本文章博客地址:https://blog.csdn.net/qq21497936/article/details/140059315 长沙红胖子Qt(长沙创微智科)博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、O…...
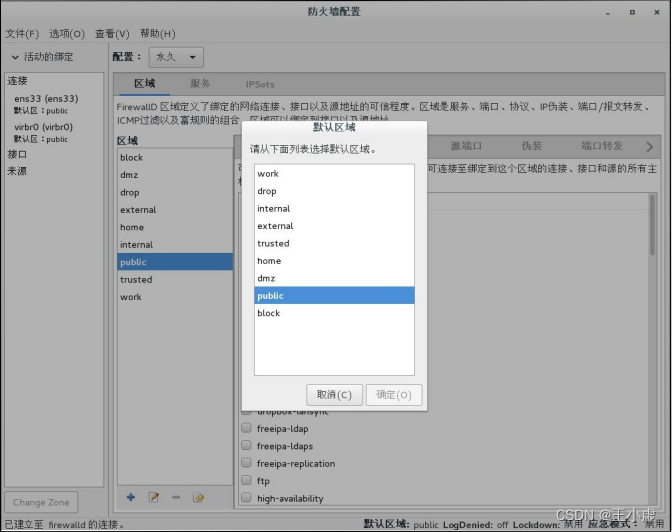
Firewalld 防火墙基础
Firewalld 防火墙基础 一、Firewalld概述firewalld 简介firewalld 和 iptables 的关系firewalld 与 iptables service 的区别 二、Firewalld 网络区域区域介绍Firewalld数据处理流程 三、Firewalld 防火墙的配置方法firewall-config 图形工具“区域”选项卡“服务”选项卡改变防…...

告别沉浸式白屏!UniApp中iOS/Android底部安全区与顶部状态栏颜色自定义全攻略
告别沉浸式白屏!UniApp中iOS/Android底部安全区与顶部状态栏颜色自定义全攻略当开发者尝试在UniApp中实现沉浸式设计时,往往会遇到一个令人头疼的问题——默认的白色安全区和状态栏导致界面元素(如电池图标、信号强度)几乎不可见。…...

IPD的势、道、法、术、器
目录 简介 一、势:为什么 IPD 是必然选择? 二、道:IPD 的底层哲学 三、法与术:从战略到执行的具体路径 四、器:让流程真正落地的工具与组织 不是每家公司都需要全套 IPD,但每家公司都需要 IPD 思维 简…...

Unity Visual Scripting不是拖拽玩具:中阶开发者的编程范式重构指南
1. 为什么Unity官方Visual Scripting不是“拖拽完就能跑”的玩具,而是一套需要重新理解的编程范式很多人第一次点开Unity的Visual Scripting(VS)面板时,看到那些五颜六色的节点和丝滑的连线,下意识觉得:“这…...

机器学习驱动储氢材料发现:从特征工程到DFT/MD验证的完整指南
1. 项目概述与核心思路氢能被视为未来清洁能源体系的关键一环,但如何安全、高效、经济地储存氢气,一直是制约其大规模应用的瓶颈。在众多储氢技术路线中,固态储氢,特别是基于金属氢化物的储氢材料,因其高体积储氢密度和…...

机器学习在犬类癌症筛查中的性能极限与挑战:基于血液数据的多癌种分析
1. 项目概述:当机器学习遇见犬类癌症筛查作为一名长期关注数据科学在生命科学领域应用的从业者,我常常被问及一个充满希望的问题:我们能否像分析人类健康数据一样,利用宠物的常规体检数据,通过机器学习提前发现癌症的蛛…...

别再盲调temperature=0.2!DeepSeek补全效果突变的4个隐藏参数,资深架构师压箱底调参清单
更多请点击: https://intelliparadigm.com 第一章:别再盲调temperature0.2!DeepSeek补全效果突变的4个隐藏参数,资深架构师压箱底调参清单 DeepSeek-R1/VL 等开源大模型在实际部署中,仅靠调节 temperature 往往收效甚…...

还在古法编程?OpenAI Codex 全自动编程!稳定中转 Token 保姆级教程
OpenAI Codex 从安装到进阶实战|终端 AI 编程完全指南(2026 最新) 摘要:OpenAI Codex 是目前最强大的终端 AI 编程工具,支持代码生成、项目重构、Bug 修复、脚本自动化、批量代码优化等全场景能力。本文从零起步&…...

【Midjourney霓虹效果终极指南】:20年AI视觉工程师亲授5大参数组合+3类光源建模公式,97%新手一周内复刻赛博朋克海报
更多请点击: https://kaifayun.com 第一章:霓虹美学的视觉原理与Midjourney适配性解析 霓虹美学源于20世纪都市夜景中的荧光灯管、电子广告与赛博朋克文化,其核心视觉特征包括高饱和度冷暖对比、边缘辉光(glow)、深色…...
)
UnityWebRequest遇到SSL证书错误别慌!手把手教你用CertificateHandler绕过验证(附完整C#代码)
Unity开发中SSL证书验证问题的应急处理与深度解析当你在Unity项目中使用UnityWebRequest进行HTTPS通信时,突然遇到"Curl error 60"或"SSL CA certificate error"这类证书验证错误,确实会让人措手不及。特别是在开发关键阶段…...

Keil uVision调试器变量监视问题解析与解决方案
1. Keil uVision调试器变量监视问题解析在嵌入式开发领域,Keil uVision作为经典的集成开发环境(IDE),其调试功能是开发者排查问题的重要工具。但许多初次接触8051或C251架构的工程师都会遇到一个看似简单却令人困惑的问题——为什么在Watch窗口无法正确显…...