RK3568驱动指南|第十六篇 SPI-第192章 mcp2515驱动编写:完善write和read函数
瑞芯微RK3568芯片是一款定位中高端的通用型SOC,采用22nm制程工艺,搭载一颗四核Cortex-A55处理器和Mali G52 2EE 图形处理器。RK3568 支持4K 解码和 1080P 编码,支持SATA/PCIE/USB3.0 外围接口。RK3568内置独立NPU,可用于轻量级人工智能应用。RK3568 支持安卓 11 和 linux 系统,主要面向物联网网关、NVR 存储、工控平板、工业检测、工控盒、卡拉 OK、云终端、车载中控等行业。
【公众号】迅为电子
【粉丝群】258811263(加群获取驱动文档+例程)
【视频观看】嵌入式学习之Linux驱动(第十六篇 SPI_全新升级)_基于RK3568
【购买链接】迅为RK3568开发板瑞芯微Linux安卓鸿蒙ARM核心板人工智能AI主板
-
第192章 mcp2515驱动编写:完善write和read函数
在上个章节中对mcp2515的工作模式进行了修改,从配置模式修改为了环回模式,而在本章节将会继续对mcp2515的驱动程序进行完善,加入mcp2515的写函数和读函数,从而实现数据的发送和接收。
192.1 编写mcp2515写函数
MCP2515有三个发送缓冲器,每个发送缓冲器都具有14字节的内存空间,每个发送缓冲器的控制由TXBnCTRL寄存器管理,该寄存器决定了何时发送报文以及发送时的报文状态。该寄存器的具体内容如下所示:

需要通过该寄存器将缓冲器优先级设置为最高,缓冲器优先级由bit1-0两位所决定,当设置为11时,该发送缓冲器具有最高的发送优先级,可以通过以下代码进行设置:
#define TXB0CTRL 0x30 //发送缓冲器控制寄存器地址 mcp2515_change_regbit(TXB0CTRL, 0x03, 0x03); //只对该寄存器低两位进行修改,修改值为0x03发送缓冲器控制寄存器TXBnCTRL为发送缓冲器的第一个字节,接下来的5个字节用来装载标准和扩展标识符以及其他报文仲裁信息。最后的8个字节用于装载等待发送报文的8个可能的数据字节,这13个字节数据由用户空间所传递,且地址是连续的,间隔为一个字节,所以可以通过以下代码进行设置:
char w_kbuf[13] = {0};
int ret;// 从用户空间复制数据到内核缓冲区
ret = copy_from_user(w_kbuf, buf, size);
if (ret) {printk("copy_from_user w_kbuf is error\n");return -1;
}// 将数据写入MCP2515寄存器
for (i = 0; i < sizeof(w_kbuf); i++) {mcp2515_write_reg(0x31 + i, w_kbuf[i]);
}数据设置完成之后,需要将TXBnCTRL寄存器的bit3设置为1,从而启动相应缓冲器的报文发送,TXBnCTRL寄存器就是上面修改发送缓冲器优先级的寄存器,具体设置代码如下所示:
#define TXB0CTRL 0x30 //发送缓冲器控制寄存器地址
mcp2515_change_regbit(TXB0CTRL, 0x08, 0x08); //只对该寄存器bit3进行修改,将bit3设置为1在报文发送成功后,CANINTF.TXnIF寄存器将会被置1,该寄存器内容如下所示:

可以通过该寄存器来判断报文是否发送成功,由于使用的是缓冲器为0,所以这里要判断的位位bit2,判断完成之后,需要对该寄存器进行手动清零,具体判断代码如下所示:
#define CANINTF 0x2c // 等待发送完成
while (!(mcp2515_read_reg(CANINTF) & (1 << 2)));// 清除发送完成标志
mcp2515_change_regbit(CANINTF, 0x04, 0x00);至此,关于mcp2515写函数的相关知识就总结完成了,可以将上面讲解的代码整理成一个完整的函数,具体内容如下所示:
#define TXB0CTRL 0x30 //发送缓冲器控制寄存器地址
#define CANINTF 0x2c // 写设备操作函数
ssize_t mcp2515_write(struct file *file, const char __user *buf, size_t size, loff_t *offset) {char w_kbuf[13] = {0};int ret;int i;// 设置TXB0CTRL寄存器的部分位mcp2515_change_regbit(TXB0CTRL, 0x03, 0x03);// 从用户空间复制数据到内核缓冲区ret = copy_from_user(w_kbuf, buf, size);if (ret) {printk("copy_from_user w_kbuf is error\n");return -1;}// 将数据写入MCP2515寄存器for (i = 0; i < sizeof(w_kbuf); i++) {mcp2515_write_reg(0x31 + i, w_kbuf[i]);}// 设置TXB0CTRL寄存器的部分位,启动发送mcp2515_change_regbit(TXB0CTRL, 0x08, 0x08);// 等待发送完成while (!(mcp2515_read_reg(CANINTF) & (1 << 2)));// 清除发送完成标志mcp2515_change_regbit(CANINTF, 0x04, 0x00);return size;
}192.2编写mcp2515读函数
在上个小节中编写了mcp2515的写函数,在本小节将编写mcp2515的读函数。
MCP2515 具有两个全接收缓冲器,当数据报文传送至某一接收缓冲器时,与该接收缓冲器对应的CANINTF.RXnIF位将置1,可以通过CANINTF.RXnIF寄存器的值来判断是否接收完成,CANINTF寄存器内容在上一节已经列出,这里不再重复,具体判断代码如下所示:
#define CANINTF 0x2c // 等待接收缓冲区满标志位被设置
while (!(mcp2515_read_reg(CANINTF) & (1 << 0)));然后编写读数据相关的代码,接收缓冲器与发送寄存器相匹配,前5个字节用来装载标准和扩展标识符以及其他报文仲裁信息,最后的8个字节用于装载等待发送报文的8个可能的数据字节,且地址是连续的,间隔为一个字节,接收缓冲器0的标准标识符高位寄存器地址为0x61,所以可以通过以下代码进行设置:
char r_kbuf[13] = {0}; // 内核缓冲区,用于存储从设备读取的数据int i;// 从接收缓冲区读取数据到内核缓冲区for (i = 0; i < sizeof(r_kbuf); i++) {r_kbuf[i] = mcp2515_read_reg(0x61 + i);}数据传送完成之后需要对CANINTF.RXnIF寄存器清零,并且使用copy_to_user传输到用户空间,具体代码如下所示:
// 清除接收缓冲区满标志位mcp2515_change_regbit(CANINTF, 0x01, 0x00);// 将内核缓冲区的数据复制到用户缓冲区ret = copy_to_user(buf, r_kbuf, size);if (ret) {printk("copy_to_user r_kbuf is error\n");return -1; // 返回-1表示复制数据失败}至此,关于mcp2515读函数的相关知识就总结完成了,可以将上面讲解的代码整理成一个完整的函数,具体内容如下所示:
#define CANINTF 0x2c // 读设备操作函数,从设备读取数据到用户缓冲区
ssize_t mcp2515_read(struct file *file, char __user *buf, size_t size, loff_t *offset) {char r_kbuf[13] = {0}; // 内核缓冲区,用于存储从设备读取的数据int i;int ret;// 等待接收缓冲区满标志位被设置while (!(mcp2515_read_reg(CANINTF) & (1 << 0)));// 从接收缓冲区读取数据到内核缓冲区for (i = 0; i < sizeof(r_kbuf); i++) {r_kbuf[i] = mcp2515_read_reg(0x61 + i);}// 清除接收缓冲区满标志位mcp2515_change_regbit(CANINTF, 0x01, 0x00);// 将内核缓冲区的数据复制到用户缓冲区ret = copy_to_user(buf, r_kbuf, size);if (ret) {printk("copy_to_user r_kbuf is error\n");return -1; // 返回-1表示复制数据失败}return 0; // 返回0表示成功读取数据
}192.3 实验程序编写
192.3.1 编写驱动程序
本实验驱动对应的网盘路径为:iTOP-3568开发板\03_【iTOP-RK3568开发板】指南教程\02_Linux驱动配套资料\04_Linux驱动程序\118_mcp2515_06\。
本实验将以191章编写完成的驱动程序为基础,添加了本章节完善的mcp2515的读和写函数,编写完成的mcp2515.c代码如下所示:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/spi/spi.h>
#include <linux/cdev.h>
#include <linux/fs.h>
#include <linux/kdev_t.h>
#include <linux/uaccess.h>#define CNF1 0x2a // 寄存器定义
#define CNF2 0x29
#define CNF3 0x28
#define RXB0CTRL 0x60
#define CANINTE 0x2b
#define CANCTRL 0xf // CAN控制寄存器#define TXB0CTRL 0x30 //发送缓冲器控制寄存器地址
#define CANINTF 0x2c dev_t dev_num; // 设备号
struct cdev mcp2515_cdev; // 字符设备结构体
struct class *mcp2515_class; // 设备类
struct device *mcp2515_device; // 设备
struct spi_device *spi_dev; // SPI设备指针// MCP2515芯片复位函数
void mcp2515_reset(void){int ret;char write_buf[] = {0xc0}; // 复位指令0x11000000即0xc0ret = spi_write(spi_dev, write_buf, sizeof(write_buf)); // 发送复位命令if(ret < 0){printk("spi_write is error\n"); // 打印错误信息}
}// MCP2515读寄存器函数
char mcp2515_read_reg(char reg) {char write_buf[] = {0x03, reg}; // SPI写缓冲区写入SPI读指令0x03char read_buf; // SPI读缓冲区int ret;ret = spi_write_then_read(spi_dev, write_buf, sizeof(write_buf), &read_buf, sizeof(read_buf)); // 调用SPI写读函数if (ret < 0) {printk("spi_write_then_read error\n");return ret;}return read_buf;
}// MCP2515写寄存器函数
void mcp2515_write_reg(char reg, char value) {int ret;char write_buf[] = {0x02, reg, value}; // SPI写缓冲区,用于发送写寄存器命令ret = spi_write(spi_dev, write_buf, sizeof(write_buf)); // 发送SPI写命令if (ret < 0) {printk("mcp2515_write_reg error\n");}
}// MCP2515修改寄存器位函数
void mcp2515_change_regbit(char reg, char mask, char value) {int ret;char write_buf[] = { 0x05, reg, mask, value }; // SPI写缓冲区,用于发送修改寄存器位命令ret = spi_write(spi_dev, write_buf, sizeof(write_buf)); // 发送SPI写命令if (ret < 0) {printk("mcp2515_change_regbit error\n");}
}// 打开设备文件的回调函数
int mcp2515_open(struct inode *inode, struct file *file) {return 0; // 返回成功
}// 读设备操作函数,从设备读取数据到用户缓冲区
ssize_t mcp2515_read(struct file *file, char __user *buf, size_t size, loff_t *offset) {char r_kbuf[13] = {0}; // 内核缓冲区,用于存储从设备读取的数据int i;int ret;// 等待接收缓冲区满标志位被设置while (!(mcp2515_read_reg(CANINTF) & (1 << 0)));// 从接收缓冲区读取数据到内核缓冲区for (i = 0; i < sizeof(r_kbuf); i++) {r_kbuf[i] = mcp2515_read_reg(0x61 + i);}// 清除接收缓冲区满标志位mcp2515_change_regbit(CANINTF, 0x01, 0x00);// 将内核缓冲区的数据复制到用户缓冲区ret = copy_to_user(buf, r_kbuf, size);if (ret) {printk("copy_to_user r_kbuf is error\n");return -1; // 返回-1表示复制数据失败}return 0; // 返回0表示成功读取数据
}// 写设备操作函数
ssize_t mcp2515_write(struct file *file, const char __user *buf, size_t size, loff_t *offset) {char w_kbuf[13] = {0};int ret;int i;// 设置TXB0CTRL寄存器的部分位mcp2515_change_regbit(TXB0CTRL, 0x03, 0x03);// 从用户空间复制数据到内核缓冲区ret = copy_from_user(w_kbuf, buf, size);if (ret) {printk("copy_from_user w_kbuf is error\n");return -1;}// 将数据写入MCP2515寄存器for (i = 0; i < sizeof(w_kbuf); i++) {mcp2515_write_reg(0x31 + i, w_kbuf[i]);}// 设置TXB0CTRL寄存器的部分位,启动发送mcp2515_change_regbit(TXB0CTRL, 0x08, 0x08);// 等待发送完成while (!(mcp2515_read_reg(CANINTF) & (1 << 2)));// 清除发送完成标志mcp2515_change_regbit(CANINTF, 0x04, 0x00);return size;
}// 关闭设备文件的回调函数
int mcp2515_release(struct inode *inode, struct file *file) {return 0; // 返回成功
}// 设备文件操作集合
struct file_operations mcp2515_fops = {.open = mcp2515_open,.read = mcp2515_read,.write = mcp2515_write,.release = mcp2515_release,
};// MCP2515设备初始化函数
int mcp2515_probe(struct spi_device *spi) {int ret, value;printk("This is mcp2515_probe\n");spi_dev = spi; // 保存SPI设备指针// 分配字符设备号ret = alloc_chrdev_region(&dev_num, 0, 1, "mcp2515");if (ret < 0) {printk("alloc_chrdev_region error\n");}// 初始化字符设备cdev_init(&mcp2515_cdev, &mcp2515_fops);mcp2515_cdev.owner = THIS_MODULE;// 添加字符设备ret = cdev_add(&mcp2515_cdev, dev_num, 1);if (ret < 0) {printk("cdev_add error\n");return -1;}// 创建设备类mcp2515_class = class_create(THIS_MODULE, "spi_to_can");if (IS_ERR(mcp2515_class)) {printk("mcp2515_class error\n");return PTR_ERR(mcp2515_class);}// 创建设备mcp2515_device = device_create(mcp2515_class, NULL, dev_num, NULL, "mcp2515");if (IS_ERR(mcp2515_device)) {printk("mcp2515_device error\n");return PTR_ERR(mcp2515_device);}mcp2515_reset(); // 复位MCP2515设备value = mcp2515_read_reg(0x0e); // 读取寄存器值printk("value is %x\n", value); // 打印读取的值mcp2515_write_reg(CNF1, 0x01); // 写入寄存器配置值mcp2515_write_reg(CNF2, 0xb1);mcp2515_write_reg(CNF3, 0x05);mcp2515_write_reg(RXB0CTRL, 0x60);mcp2515_write_reg(CANINTE, 0x05);mcp2515_change_regbit(CANCTRL, 0xe0, 0x40);value = mcp2515_read_reg(0x0e); // 读取寄存器值printk("value is %x\n", value); // 打印读取的值return 0; // 返回成功
}// MCP2515 SPI设备的移除函数
static int mcp2515_remove(struct spi_device *spi) {device_destroy(mcp2515_class, dev_num);class_destroy(mcp2515_class);cdev_del(&mcp2515_cdev);unregister_chrdev_region(dev_num, 1);return 0;
}// MCP2515设备匹配表,用于设备树匹配
static const struct of_device_id mcp2515_of_match_table[] = {{ .compatible = "my-mcp2515" },{}
};// MCP2515设备ID匹配表,用于总线匹配
static const struct spi_device_id mcp2515_id_table[] = {{ "mcp2515", 0 },{}
};// MCP2515 SPI驱动结构体
static struct spi_driver spi_mcp2515 = {.probe = mcp2515_probe, // 探测函数.remove = mcp2515_remove, // 移除函数.driver = {.name = "mcp2515", // 驱动名称.owner = THIS_MODULE, // 所属模块.of_match_table = mcp2515_of_match_table, // 设备树匹配表
},.id_table = mcp2515_id_table, // 设备ID匹配表
};// 驱动初始化函数
static int __init mcp2515_init(void)
{int ret;// 注册SPI驱动ret = spi_register_driver(&spi_mcp2515);if (ret < 0) {// 注册失败,打印错误信息printk("spi_register_driver error\n");return ret;}return ret;
}// 驱动退出函数
static void __exit mcp2515_exit(void)
{// 注销SPI驱动spi_unregister_driver(&spi_mcp2515);
}module_init(mcp2515_init);
module_exit(mcp2515_exit);MODULE_LICENSE("GPL");192.3.2 编写测试APP
本实验测试APP对应的网盘路径为:iTOP-3568开发板\03_【iTOP-RK3568开发板】指南教程\02_Linux驱动配套资料\04_Linux驱动程序\118_mcp2515_06\。
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>// 主函数,程序入口点
int main(int argc, char *argv[]){int fd; // 文件描述符int i; // 循环变量// 写缓冲区,包含13个字节的数据,将发送到MCP2515char w_buf[13]= {0x66,0x08,0x22,0x33,0x08,0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08};// 读缓冲区,用于接收从MCP2515读取的数据char r_buf[13] = {0};// 打开MCP2515设备文件,获取文件描述符fd = open("/dev/mcp2515", O_RDWR);if(fd < 0){// 打开设备文件失败,打印错误信息并返回printf("open /dev/mcp2515 error \n");return -1;}// 将写缓冲区的数据写入设备write(fd, w_buf, sizeof(w_buf));// 从设备读取数据到读缓冲区read(fd, r_buf, sizeof(r_buf));// 打印读缓冲区的数据for(i = 0; i < 13; i++){printf("r_buf[%d] is %d\n", i, r_buf[i]);}// 关闭设备文件close(fd);return 0; // 返回0表示程序正常结束
}上述测试app代码中第13行表示要发送给mcp2515的13个字节的数据,其中前5个字节用来装载标准和扩展标识符以及其他报文仲裁信息,最后的8个字节用于装载等待发送报文的8个可能的数据字节,第一个字节发送缓冲器标准标识符高位、第三个字节发送缓冲器扩展标识符高位、第四个字节发送缓冲器扩展标识符低位可以随意设置,这里设置的是0x66、0x22、0x33。
第二个字节为发送缓冲器标准标识符低位,该寄存器的具体内容如下所示:
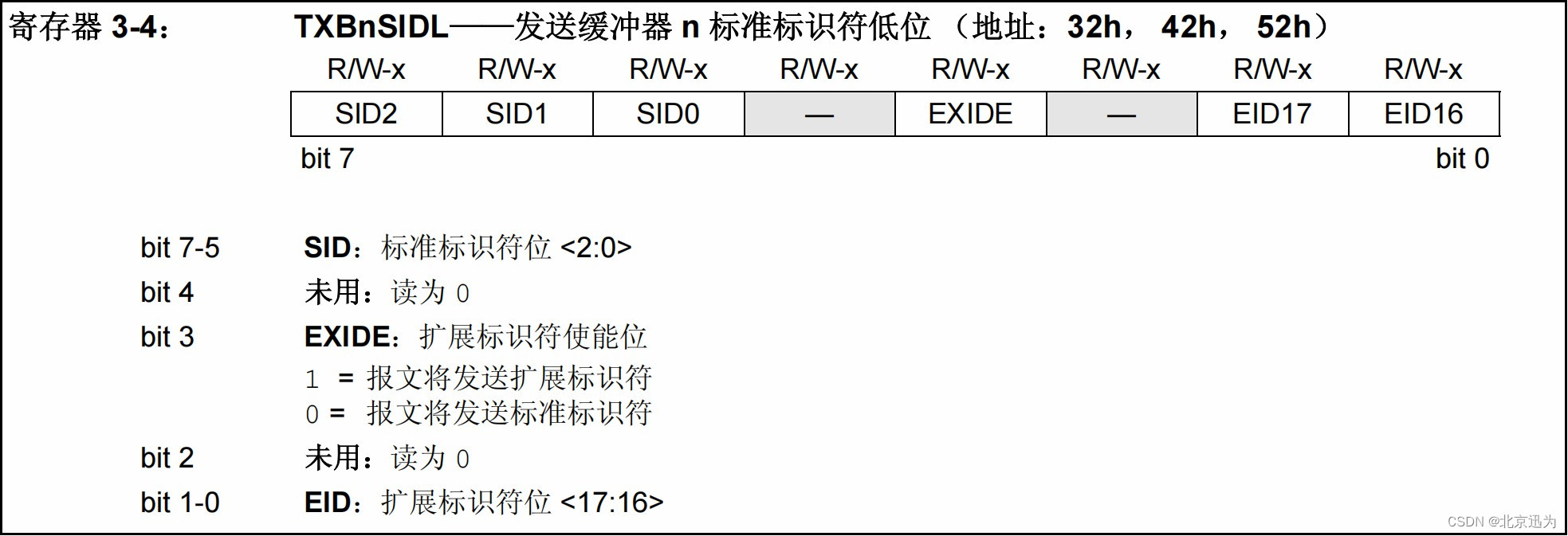
其中bit3代表扩展标识符的使能位,这里需要设置为1进行使能,换算成16进制为0x08。
第5个字节为发送缓冲器数据长度码,该寄存器内容如下所示:

其中bit6需要设置为0,表示发送的报文为数据帧。而要发送的数据为8个字节,所以bit3-bit0需要设置为8,换算成16进制为0x08。
至此,关于前5个字节内容的设置就讲解完成了,而后8个字节为要发送的数据,这里随意取值即可。
192.4 运行测试
192.4.1 编译驱动程序
在上一小节中的mcp2515.c代码同一目录下创建 Makefile 文件,Makefile 文件内容如下所示:
export ARCH=arm64#设置平台架构
export CROSS_COMPILE=aarch64-linux-gnu-#交叉编译器前缀
obj-m += mcp2505.o #此处要和你的驱动源文件同名
KDIR :=/home/topeet/Linux/linux_sdk/kernel #这里是你的内核目录
PWD ?= $(shell pwd)
all:make -C $(KDIR) M=$(PWD) modules #make操作
clean:make -C $(KDIR) M=$(PWD) clean #make clean操作对于Makefile的内容注释已在上图添加,保存退出之后,来到存放mcp2515.c和Makefile文件目录下,如下图所示:

然后使用命令“make”进行驱动的编译,编译完成如下图所示:

编译完生成ft5x06_driver.ko目标文件,如下图所示:

至此驱动模块就编译成功了。
192.4.2 编译应用程序
首先进行应用程序的编译,因为测试APP是要在开发板上运行的,所以需要aarch64-linux-gnu-gcc来编译,输入以下命令,编译完成以后会生成一个app的可执行程序,如下图所示:
aarch64-linux-gnu-gcc app.c -o app

然后将编译完成的可执行程序拷贝到开发板上.
192.4.2 运行测试
在进行实验之前,首先要确保开发板烧写的是我们在186.1小节中编译出来的boot.img。开发板启动之后,然后使用以下命令进行驱动模块的加载,如下图所示:
insmod mcp2515.ko

然后使用“./app”运行上一小节中编译的可执行程序,运行结果如下所示:

可以看到可执行程序运行之后会将传输的13位数据依次打印出来,这里打印的是10进制,换算成16进制之后与0x66,0x08,0x22,0x33,0x08,0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08相匹配,证明编写的mcp2515读函数和写函数可以正常工作。
最后使用以下命令进行驱动模块的卸载,如下图所示:
rmmod mcp2515.ko

由于没有在remove卸载函数中添加打印相关内容,所以使用rmmod命令卸载驱动之后,没有任何打印。
至此,MCP2515读函数和写函数测试实验就完成了。
相关文章:
RK3568驱动指南|第十六篇 SPI-第192章 mcp2515驱动编写:完善write和read函数
瑞芯微RK3568芯片是一款定位中高端的通用型SOC,采用22nm制程工艺,搭载一颗四核Cortex-A55处理器和Mali G52 2EE 图形处理器。RK3568 支持4K 解码和 1080P 编码,支持SATA/PCIE/USB3.0 外围接口。RK3568内置独立NPU,可用于轻量级人工…...

#BI建模与数仓建模有什么区别?指标体系由谁来搭建?
问题1: 指标体系是我们数仓来搭建还是分析师来做,如何去推动? 问题2:BI建模与数仓建模有什么区别? 指标体系要想做好,其实是分两块内容的,一块是顶层设计阶段,业务指标体系的搭建&am…...
如何用Python实现三维可视化?
Python拥有很多优秀的三维图像可视化工具,主要基于图形处理库WebGL、OpenGL或者VTK。 这些工具主要用于大规模空间标量数据、向量场数据、张量场数据等等的可视化,实际运用场景主要在海洋大气建模、飞机模型设计、桥梁设计、电磁场分析等等。 本文简单…...
chrome.storage.local.set 未生效
之前chrome.storage.local.set 和 get 一直不起作用 使用以下代码运行成功。 chrome.storage.local.set({ pageState: "main" }).then(() > {console.log("Value is set");});chrome.storage.local.get(["pageState"]).then((result) > …...

泛微开发修炼之旅--30 linux-Ecology服务器运维脚本
文章链接:30 linux-ecology服务器运维脚本...

LeetCode 全排列
思路:这是一道暴力搜索问题,我们需要列出答案的所有可能组合。 题目给我们一个数组,我们很容易想到的做法是将数组中的元素进行排列,如何区分已选中和未选中的元素,容易想到的是建立一个标记数组,已经选中的…...

python实现支付宝异步回调验签
说明 python实现支付宝异步回调验签,示例中使用Django框架。 此方案使用了支付宝的pythonSDK,请一定装最新版本的,支付宝官网文档不知道多久没更新了,之前的版本pip安装会报一些c库不存在的错误; pip install alipay-…...
注意!Vue.js 或 Nuxt.js 中请停止使用.value
大家好,我是CodeQi! 一位热衷于技术分享的码仔。 当您在代码中使用.value时,必须每次都检查变量是否存在并且是引用。 这可能很麻烦,因为在运行时使用.value可能会导致错误。然而,有一个简单的解决方法,即使用unref()而不是.value。 unref()会检查变量是否是引用,并自…...

Java:JDK、JRE和JVM 三者关系
文章目录 一、JDK是什么二、JRE是什么三、JDK、JRE和JVM的关系 一、JDK是什么 JDK(Java Development Kit):Java开发工具包 JRE:Java运行时环境开发工具:javac(编译工具)、java(运行…...

Radio专业术语笔记
在收音机的 RDS (Radio Data System) 功能中,CT 代表 “Clock Time”。RDS 是一种数字广播标准,用于在调频广播中传输辅助数据,如电台名称、节目类型、交通信息等。CT 功能是其中的一部分,用于同步和显示广播电台发送的当前时间。…...

cocosCreator找出未用到的图片
最近整理项目的时候发现有些资源文件夹有点轮乱(一些历史原因导致的),而且有很多图片都是没用了的,但是没有被删除掉,还一直放在项目中,导致项目的资源文件夹比较大,而且还冗余。于是今天想着整理一下。 公开免费链接 找出未使用的图片 有好几种方法可以找出未使用的图片…...
一览 Anoma 上的有趣应用概念
撰文:Tia,Techub News 本文来源香港Web3媒体:Techub News Anoma 的目标是为应用提供通用的意图机器接口,这意味着使用 Anoma,开发人员可以根据意图和分布式意图机编写应用,而不是根据事务和特定状态机进行…...

Spring Boot集成fastjson2快速入门Demo
1.什么是fastjson2? fastjson2是阿里巴巴开发的一个高性能的Java JSON处理库,它支持将Java对象转换成JSON格式,同时也支持将JSON字符串解析成Java对象。本文将介绍fastjson2的常见用法,包括JSON对象、JSON数组的创建、取值、遍历…...
Three.js机器人与星系动态场景(二):强化三维空间认识
在上篇博客中介绍了如何快速利用react搭建three.js平台,并实现3D模型的可视化。本文将在上一篇的基础上强化坐标系的概念。引入AxesHelper辅助工具及文本绘制工具,带你快速理解camer、坐标系、position、可视区域。 Three.js机器人与星系动态场景&#x…...

java顺序查找
其中有一个常用的编程思想: 由于是遍历查找,不能用if-else来输出没有找到,而应该设置一个索引index,如果找到就将index的值设置成下标的值,如果遍历结束后index仍为初始值,才是没有找到 //2024.07.03impor…...
提升学生职务执行力的智慧校园学工管理策略
智慧校园的学工管理系统匠心独运地融入了“学生职务”这一创新模块,它紧密贴合学生的实际需求,致力于在校期间的实践经验积累和个人能力的全面提升。这个模块化身为一个便捷的综合平台,让学生们能够轻松发掘并参与到丰富多彩的校内职务中去&a…...
系统运维面试总结(shell编程)
SYNDDOS攻击,需要判断这个访问是正常访问还是信包攻击,当前这个信包发起的访问数量是多少,例如看到30个信包同时再访问时设置监控报警。 一般选用/dev/urandom生成,但其生成的随机数带有二进制乱码,所以需要tr命令…...

在数据库中,什么是主码、候选码、主属性、非主属性?
在数据库中,主码、候选码、主属性和非主属性是几个重要的概念,它们对于理解数据库的结构和数据的完整性至关重要。以下是对这些概念的详细解释: 一、主码(Primary Key) 定义:主码,也被称为主键…...

Linux-笔记 udev机制介绍
目录 前言 概念 规则文件 规则文件的命名 规则文件的语法 匹配条件 赋值指令 例子 前言 由于之前利用udev机制实现了一个自动配置某功能的项目,所以这里做一下笔记总结,什么是udev?怎么用? 概念 udev其实是linux系统中一…...
深度学习基准模型Mamba
深度学习基准模型Mamba Mamba(英文直译:眼镜蛇)具有选择性状态空间的线性时间序列建模,是一种先进的状态空间模型 (SSM),专为高效处理复杂的数据密集型序列而设计。 Mamba是一种深度学习基准模型,专为处理长序列数据而设计&…...

30岁裸辞后,我用两个月拿下AI应用认证,现在OFFER选择困难症犯了
30岁裸辞那天,我最怕的不是没收入,而是突然发现:过去积累的经验,正在被AI重新定价。以前会写方案、做表格、跟项目,算是职场硬通货;到了2026年,招聘JD里开始频繁出现AI工具应用、智能工作流、Pr…...

亚马逊 Rufus 关停,Alexa 正式上线:卖家必须读懂的6条新规则
2026年5月13日,亚马逊官方正式宣布,下线Rufus,推出全新AI购物助手:Alexa for Shopping。但是,这不是粗暴地直接下线 Rufus,而是一次购物AI底层架构的重组 —— 将 Rufus 的商品专长 与 Alexa的用户理解力&a…...
)
别再只测accuracy!DeepSeek集成测试必须监控的5个隐性指标(P99首token延迟、context bleed率、tool-call schema漂移)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek集成测试的核心范式演进 DeepSeek大模型的工程化落地对集成测试提出了全新挑战:传统基于接口响应码与字段校验的测试范式已难以覆盖语义一致性、推理链鲁棒性、上下文敏感度等高阶质…...

炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南
炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南 【免费下载链接】Hearthstone-Script Hearthstone script(炉石传说脚本) 项目地址: https://gitcode.com/gh_mirrors/he/Hearthstone-Script 还在为每天重复的炉石…...

【深度解析】AI Coding 模型竞速:从 Claude Mythos 安全编码到 GPT-5.6 传闻,如何落地代码审查智能体
摘要 AI 编码模型正在从“代码补全”进入“复杂代码库理解、漏洞发现与自动修复”阶段。本文结合 Claude Mythos、Claude Opus 4.8 与 GPT-5.6 相关信息,解析新一代 Coding Agent 的技术趋势,并给出基于大模型 API 的代码安全审查实战方案。背景介绍&…...

当 AI Coding 进入复杂企业系统,为什么提效远没有宣传里那么美好 ?
以 Claude Code、Codex 为代表的自主编码智能体(Coding Agents),正在以惊人的速度席卷软件开发者生态。与此同时,类似“10 倍开发效率”“普通人也能随手构建软件”“程序员即将失业”的说法,也随处可见。这种不分场景…...

双稳健机器学习:用正交性与交叉拟合解决因果推断中的ML偏差
1. 项目概述:当机器学习遇见因果推断的“干扰”难题在实证研究的日常工作中,我们常常面临一个核心矛盾:我们真正关心的,往往只是一个或几个关键参数——比如一项政策对就业率的平均影响(平均处理效应,ATE&a…...
:3类高危使用场景+2个监管红线预警)
Claude SWOT分析(内部风控文档流出版):3类高危使用场景+2个监管红线预警
更多请点击: https://intelliparadigm.com 第一章:Claude SWOT分析(内部风控文档流出版):3类高危使用场景2个监管红线预警 高危使用场景识别 在企业级AI应用中,Claude模型若未经严格风控适配,…...

Redis 客户端连接详解
Redis 客户端连接详解 引言 Redis 是一款高性能的内存数据结构存储系统,常用于缓存、会话管理、实时排行榜等功能。客户端连接是 Redis 生态系统中的重要组成部分,本文将详细介绍 Redis 客户端连接的相关知识,包括连接方式、连接配置、连接管理等方面。 Redis 客户端连接…...

终极解决方案:Windows Cleaner免费开源工具,3步彻底解决C盘爆红问题
终极解决方案:Windows Cleaner免费开源工具,3步彻底解决C盘爆红问题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否也经历过这样的…...